Les drones sont capables de beaucoup de choses: des reportages de prise de vue et des mariages à la surveillance des zones forestières pour répondre rapidement aux incendies, suivre l'état des réseaux énergétiques et des oléoducs. Les robots potentiellement volants peuvent être utilisés à l'intérieur, mais pour cela, ils doivent être rapides et suffisamment puissants pour interagir avec l'environnement. Pour ce faire, les experts japonais ont créé un robot modulaire DRAGON ressemblant à un tentacule volant, qui change de forme pour pénétrer dans les petits trous et à l'avenir agir comme un manipulateur.
Pendant les opérations de sauvetage, le robot peut avoir besoin de pénétrer par la porte, puis de surmonter de nombreux autres obstacles dangereux - de ne pas s'écraser contre un mur, un placard, un ficus ou une personne. Pour résoudre ce problème, vous pouvez créer un très petit robot qui volerait dans n'importe quel emplacement. Mais il ne conviendra qu'à l'observation. Vous pouvez équiper le drone d'un cadre de protection - mais un tel drone encombrant ne pourra pas trop bien interagir avec l'environnement, c'est-à-dire que cela n'aidera que pour les opérations de recherche. Idéalement, le robot devrait être à la fois petit et agile, mais suffisamment puissant.
Le
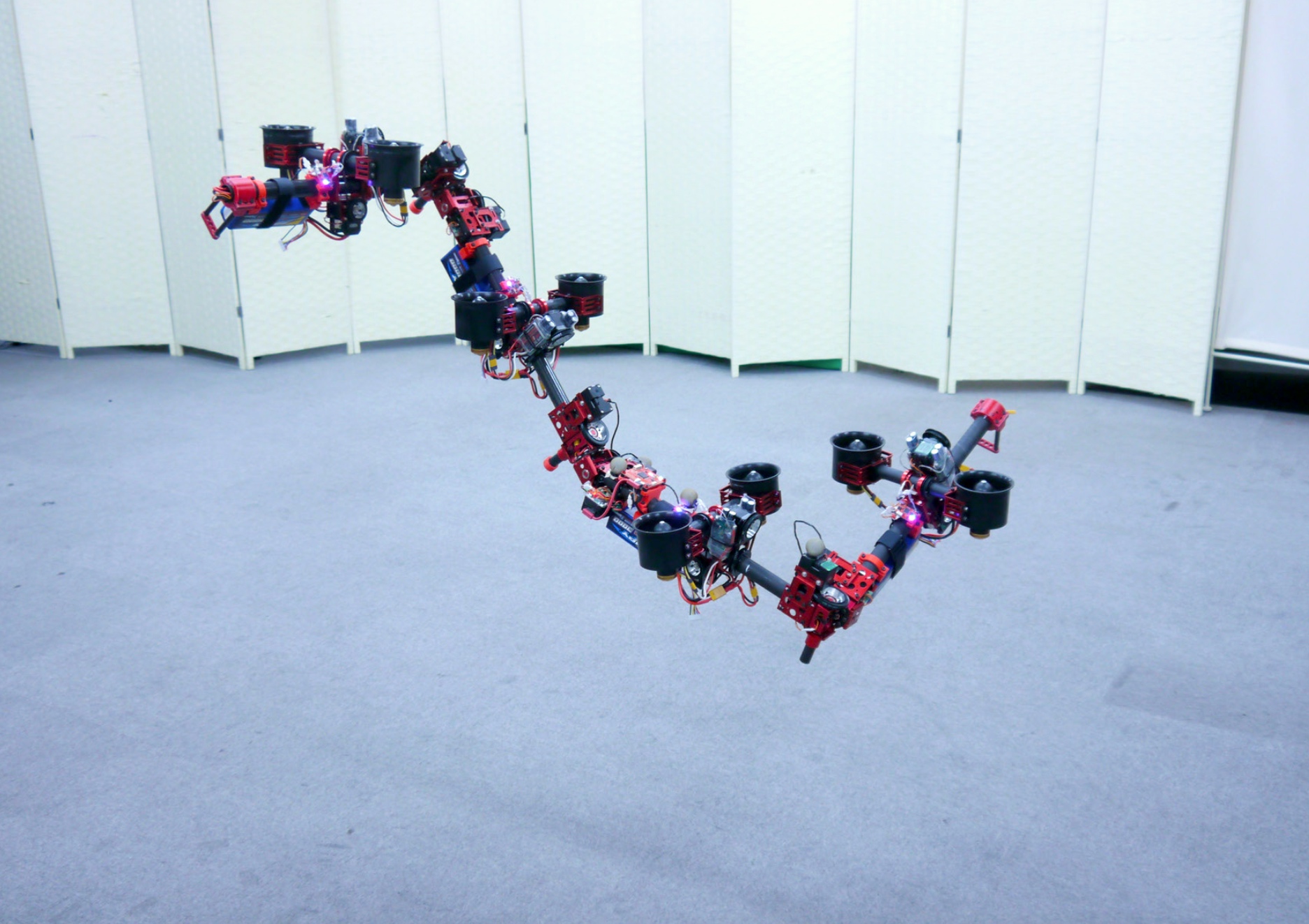
laboratoire JSK de l'Université de Tokyo Robotics a créé le robot DRAGON, qui signifie Robot multibras intégré à double rotor avec la capacité de transformation aérienne multi-degrés de liberté. L'appareil modulaire change de forme à la volée - il se transforme d'un hélicoptère carré en un serpent mince, ce qui lui permet de pénétrer dans des passages étroits ou de prendre une forme différente.
DRAGON se compose de modules, chacun étant équipé d'une paire de ventilateurs dans le capot annulaire. Les ventilateurs changent de position, ce qui fait que les modules se déplacent dans différentes directions, de sorte que le robot peut voler dans presque toutes les formes qui lui permettront de faire des degrés de liberté. Les modules sont reliés par des supports pivotants. L'appareil fonctionne sur la base d'un
ordinateur compact
Intel Euclid . La batterie dure trois minutes de vol, les scientifiques doivent travailler sur l'amélioration de cet indicateur. On peut supposer que l'appareil sera enregistré par câble, mais dans ce cas, il perdra sa maniabilité, ou d'autres sources d'alimentation indépendantes seront trouvées.
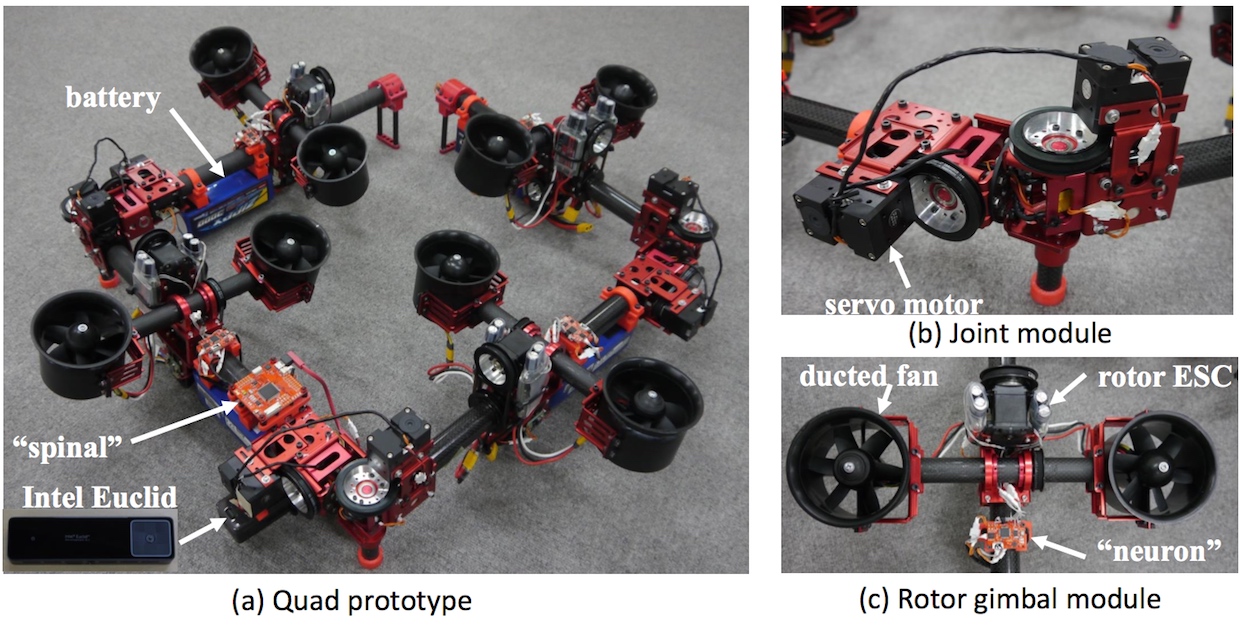
Un prototype de quatre modules équipés d'un total de huit ventilateurs. L'une des tâches des développeurs consistait à concevoir un logiciel permettant au robot de décider indépendamment de la forme à prendre dans un cas particulier. Dans la vidéo, les développeurs ont montré comment un robot en forme de serpent vole à travers une petite "trappe".
À l'avenir, le robot se composera de douze modules et sera en même temps capable de soulever des objets en utilisant les modules extrêmes comme poignée à deux doigts. On peut supposer qu'un tel robot peut s'enrouler autour d'un objet pour le transférer, ou interagir autrement avec son environnement.
Les robots volants sont utilisés pour les opérations de sauvetage et de surveillance. Dans les espaces ouverts, les quadrocoptères peuvent
jeter une bouée de sauvetage en train de se
noyer ,
livrer un défibrillateur à une personne , surveiller ce qui se passe afin de trouver des personnes perdues et surveiller le terrain lors des urgences pour une réponse rapide. Dans le cas d'espaces clos, il existe des prototypes de robots serpentins - par exemple, un robot doux de chercheurs de
l'Université de Stanford qui redimensionne, étire, plie et attrape des objets, monte à une grande hauteur, peut monter dans de très petites fentes, ou, par exemple, sous une boîte jusqu'à 100 kilogrammes pour le soulever. La coque souple traverse même des objets pointus comme des clous et change de forme - les pompes pompent l'air dans le boîtier.
Un
appareil de 8 mètres de développeurs japonais de l'Université de Tohoku a été créé pour rechercher des personnes lors de tremblements de terre. Le robot se déplace à une vitesse pouvant atteindre 10 centimètres par seconde, "touchant" la surface hérissée. Une première version de ce robot a été utilisée lors de la liquidation des conséquences de la
catastrophe de la centrale nucléaire de Fukushima , mais il s'est principalement déplacé dans une direction - en avant. Le nouveau robot s'est avéré plus mobile.
Il y a eu des tentatives de combiner des robots volants et des robots serpentins.
Un quadcoptère de scientifiques de l'Université de Pennsylvanie sur place délivre deux robots serpentins qui peuvent monter les escaliers ou pénétrer dans les fissures.
Le prototype de JSK Lab combinera les avantages des robots volants avec des robots serpentins et interagira de diverses manières avec les objets, au lieu de se livrer uniquement à l'observation. Un employé du laboratoire JSK décrit DRAGON comme «une percée en termes de conception structurelle» et «une plate-forme idéale pour les manipulateurs d'air».