Dans le dernier
article, nous avons parlé des projets de robotique intellectuelle qui intéressent la Sberbank. Aujourd'hui, nous analyserons les cobots: historique, classement, comment ils peuvent être gagnés ou utilisés pour résoudre leurs problèmes.
 Source: Universal Robots
Source: Universal RobotsPartie 1. Qu'est-ce qu'un cobot
Il ne suffit pas d'appeler votre robot collaboratif. Il doit répondre aux exigences des normes internationales, dont la principale est
ISO / TS 15066: 2016 (analogique américain
ANSI / RIA TR R15.606: 2016 ). Bien qu'il soit plus correct de dire que ce n'est pas une norme, mais une spécification technique. Il y a une différence: l'ISO élabore parfois des spécifications techniques avant la publication des normes officielles finales. Il s'agit d'une reconnaissance du fait que l'état actuel de la robotique collaborative est dynamique et évoluera avec le temps.
Le format des spécifications techniques est nécessaire pour fixer l'état «ici et maintenant» afin que la communauté puisse travailler, sachant qu'il y aura des changements à l'avenir.
Selon l'ISO, un
cobot (abréviation de
robot collaboratif ) est un robot conçu pour une interaction directe avec une personne dans un certain espace articulaire.
Un robot collaboratif
PEUT être utilisé pour la collaboration (
ISO 10218 ).
La collaboration est un état dans lequel un système robotique spécialement conçu et un opérateur travaillent dans le cadre d'une zone de travail commune.
Espace commun - un espace de travail protégé dans lequel un robot et une personne peuvent effectuer simultanément des tâches lors d'une opération de fabrication.
Vous avez probablement des questions:
- Le robot deviendra-t-il collaboratif si j'enlève la clôture de protection d'un robot industriel conventionnel? Non
- Le robot deviendra-t-il collaboratif si je limite la puissance et la force du manipulateur? Non , car un objet pointu, même avec peu de force, peut endommager une personne
- Si le robot est collaboratif, cela signifie-t-il que je n'ai pas besoin de faire une évaluation des risques? L'évaluation des risques doit être effectuée.
En termes simples, il s'agit d'un robot qui peut effectuer des tâches dans un espace commun avec une personne, sans lui nuire, c'est-à-dire que
trouver une personne dans la zone de travail d'un cobot est absolument sûr . Différences du cobot par rapport au robot industriel habituel:
- beaucoup d'entre eux sont moins chers que le robot industriel habituel: 24 000 $ au lieu de 40 $ + mille;
- plus facile à installer et à configurer (les robots pèsent environ 30 kg, vous n'avez besoin que d'une prise 220v, il y a une interface graphique);
- il est flexible, il est facile de le changer (interfaces de programmation intuitives, il n'est pas sûr pour l'homme et l'environnement.
Auparavant, le moyen de protéger les personnes consistait à les séparer de l'équipement robotique avec des dispositifs de protection physique, par exemple des cellules.

 Pixabay.comControleng.com
Pixabay.comControleng.comAvec l'avènement des systèmes robotiques collaboratifs, ce paradigme a changé: vous pouvez désormais travailler ensemble.

 www.objektifhaber.com/aslan-gibi-dostluk-94036-haberwww.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-freePourquoi est-ce bien?
www.objektifhaber.com/aslan-gibi-dostluk-94036-haberwww.ge.com/reports/3-1b-collaborative-co-bot-market-isnt-hazard-freePourquoi est-ce bien? Parce que nous obtenons une synergie des forces du robot (vitesse élevée et précision lors de l'exécution des opérations de routine) et des humains (pensée créative, travail dans des situations non standard). Cela augmente la productivité dans l'industrie, ce qui signifie qu'elle a un effet positif sur l'économie dans son ensemble.
ISO / TS 15066: 2016 est la première spécification mondiale d'exigences de sécurité pour les robots collaboratifs. Le document a été élaboré par un comité (qui comprenait des experts de 24 pays et des grandes entreprises manufacturières) ISO depuis 2010. Elle est destinée à compléter les exigences et recommandations pour le fonctionnement conjoint d'un robot industriel décrites dans l'ISO 10218-1 et l'ISO 10218-2 («Exigences de sécurité pour les robots industriels»), l'ISO / TS 15066 définit les exigences de sécurité pour le fonctionnement conjoint des systèmes robotiques industriels et un Mercredi. Le document fournit des conseils à ceux qui effectuent des évaluations des risques lorsque les personnes et les robots travaillent ensemble.
Conformément à l'ISO / TS 15066, il existe 4 formes de collaboration:- Arrêt contrôlé (arrêt surveillé de sécurité) ;
- Guidage manuel;
- Surveillance de la vitesse et de la séparation ;
- Limitation de puissance et de force
Examinons chacun d'eux plus en détail.
Arrêt surveillé de sécuritéCe formulaire est utilisé lorsque le robot agit principalement de lui-même, mais parfois une personne doit entrer dans l'espace de travail. Par exemple, un robot traite une pièce, mais au milieu du processus technologique, une personne doit effectuer avec elle une opération que le robot ne peut pas faire. Si une personne entre dans une zone de sécurité prédéterminée, le robot cessera de bouger. Dans le même temps, la puissance des moteurs ne disparaît pas - ils s'arrêtent. C'est un point très important, car une fois qu'une personne quitte la zone de sécurité, le robot reprend immédiatement le travail. Cela vous permet de ne pas perdre de temps sur un redémarrage complet du programme de travail, comme c'est le cas avec un arrêt complet du robot. Si les gens dépassaient constamment le robot, il n'aurait tout simplement pas le temps de travailler.
- Un arrêt est assuré sans perte de puissance du moteur (pause, pas arrêt).
- L'opérateur peut interagir avec le robot.
- Le travail automatique peut reprendre lorsqu'une personne quitte l'espace de travail.
- À un moment donné, une personne ou un robot peut bouger.
- Il peut être utilisé avec des robots industriels ordinaires, mais vous devez ajouter des barrières de sécurité contre la lumière (télémètres laser, photodétecteurs).
Guidage manuelCette forme de collaboration est utilisée pour des opérations précises avec des objets lourds (par exemple, l'installation de portes de voiture). Cette forme peut être utilisée pour travailler avec des robots industriels ordinaires, mais avec un dispositif supplémentaire qui «détecte» les forces que le travailleur applique au manipulateur, il s'agit généralement d'un capteur de couple sur la bride du robot.
- L'opérateur est en contact direct avec le robot.
- Le robot est sous contrôle manuel.
- Les humains et les robots peuvent se déplacer simultanément (les mouvements sont contrôlés par les humains).
- Des robots industriels ordinaires peuvent être utilisés.
- Équipement supplémentaire requis (capteur de couple).
Surveillance de la vitesse et de la séparationIci, l'environnement du robot est contrôlé par des barrières de sécurité légères, qui suivent la position des personnes, comme dans la première forme de collaboration. La différence réside dans le scénario: si dans la première forme la tâche principale du robot est de s'arrêter, alors voici le travail simultané d'une personne et d'un robot. Le comportement du robot dépendra des zones préconfigurées dans son programme de contrôle: à mesure qu'une personne s'approche, le robot réduit la vitesse de ses mouvements, et si une personne s'approche si près qu'une collision est inévitable, un arrêt se produit. Lorsqu'une personne s'éloigne, le robot reprend son travail et accélère.

- La vitesse du robot diminue à mesure qu'une personne s'approche.
- Le robot s'arrête en cas de collision avec une personne.
- Une personne et un robot peuvent se déplacer simultanément.
- Il peut être utilisé avec des robots industriels ordinaires, mais vous devez ajouter des barrières de sécurité contre la lumière (télémètres laser, photodétecteurs).
- Utilisé pour les opérations nécessitant la présence fréquente de personnel.
Image: Roberta Nelson Shea - «Introduction ISO / TS 15066»Les trois formes de collaboration décrites ci-dessus peuvent être utilisées avec des robots industriels conventionnels, sous réserve de la disponibilité d'appareils supplémentaires. Ces solutions sont appelées
systèmes robotiques collaboratifs . La différence entre un
robot collaboratif est qu'il peut ne pas utiliser de dispositifs de sécurité (externes) supplémentaires - ils sont déjà intégrés. Une autre différence importante entre les systèmes robotiques collaboratifs et les robots collaboratifs est que lorsque vous travaillez ensemble, le contact avec une personne est exclu. Mais un robot collaboratif peut être en contact avec le corps humain sans lui nuire. Ceci est réalisé en limitant la puissance et l'effort.
Limitation de puissance et de forceLa plupart des gens, représentant le cobot, parlent d'un robot qui utilise cette forme particulière de collaboration. Par conséquent, nous l'examinons plus en détail.
Dans les "articulations" du robot se trouvent des capteurs de couple qui peuvent déterminer le fait d'une collision avec une personne. Si les capteurs détectent un excès de forces autorisées, le robot s'arrête. Ces robots sont également conçus pour disperser les forces sur une large surface, en cas de choc - c'est pourquoi les détails de leur corps sont le plus souvent réalisés avec des formes arrondies. En règle générale, les fonctionnalités permettant de limiter la puissance et la force sont incluses dans le logiciel standard.
- La force et la puissance du robot sont contrôlées de sorte qu'un contact accidentel entre le robot et l'opérateur ne cause aucun dommage.
- Une personne et un robot peuvent se déplacer simultanément.
- Mesures de réduction des risques possibles:
- Facteurs de conception du robot (par exemple, formes arrondies, matériaux malléables);
- un choix approprié d'applications et la conception de la cellule du robot (par exemple, grappin, pièce, trajectoire, etc.).
Le contact en PFL peut être de deux types: transitoire (transitoire) et quasi-statique (quasi-statique) .
| Contact de transition
| Quasi statique
contact
|
La description
| Événement de contact «court» (<50 ms).
Une partie du corps humain peut généralement rebondir.
| Le contact peut être long.
Une partie du corps humain peut être capturée.
|
Critères limites (ce qui doit être géré)
| Effort d'impulsion, pression, tension.
Transfert d'énergie, puissance spécifique.
| Forces de pointe, pression, tension
|
Accessibilité en conception / contrôle
| Position du robot, charge utile.
Vitesse (relative).
Zone de contact, durée.
| Résistance (couples de liaison, position).
Zone de contact, durée.
|
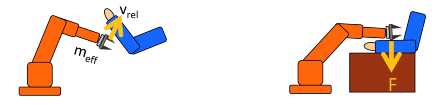 Image: Bjoern Matthias - «Limitation de puissance et de force des robots collaboratifs»Mesures de réduction des risques
Image: Bjoern Matthias - «Limitation de puissance et de force des robots collaboratifs»Mesures de réduction des risques | Contact de transition
| Contact quasi statique
|
La construction
| Diminution du poids effectif.
Zone de contact accrue.
Augmentation de la durée de contact.
| Zone de contact accrue.
|
La gestion
| Diminution de la vitesse relative.
Diminution de la masse effective par une sélection de position appropriée.
| Réduction du couple et de la puissance maximum.
Temps de contact réduit.
|
La configuration ultime est l'équilibre entre la sécurité et les performances.La spécification technique ISO / TS 15066 comprend un tableau développé par l'Université de Mayence sur l'étude du seuil de douleur, qui fournit une liste des niveaux de force et de pression pour la conception des efforts du robot (le seuil de douleur de 100 personnes à 29 points de douleur a été étudié).


 Source: ISO / TS 15066: 2016, Fig. 4, Fig A.1
Source: ISO / TS 15066: 2016, Fig. 4, Fig A.1 Source: ISO / TS 15066: 2016.Source: R. Nelson Shea, présentation NRSC 2016. Utilisé avec permissionN'oubliez pas: la sécurité est l'absence de blessures.
Source: ISO / TS 15066: 2016.Source: R. Nelson Shea, présentation NRSC 2016. Utilisé avec permissionN'oubliez pas: la sécurité est l'absence de blessures.Partie 2. L'histoire des cobots
Le premier cobot a été développé en 1996 par
J. Edward Colgate et
Michael Peshkin de la Northwestern University (USA). En comparaison, les robots industriels conventionnels étaient fabriqués depuis plus de 30 ans à cette époque. Cependant, le terme «cobot» a été inventé à la suite d'un concours pour le meilleur nom par une autre personne de la même université - Brent Gillespie. Le Wall Street Journal a tellement aimé le terme qu'il l'a mis sur la liste des
mots de demain et a remis un prix de 50 $
Le premier brevet de cobot a été déposé aux États-Unis en février 1996 (
US 5 923 129 ) et le brevet utilisant le terme cobot en octobre 1997 (
US 5 952 796 ).
Des photos des premiers cobots peuvent être vues iciLe développement de cobots à la Northwestern University a été soutenu par les fonds d'entreprise General Motors et Ford, ainsi que par la US National Science Foundation. Dans le même 1996, des scientifiques ont fondé la société Cobotics (en 2002, elle a été absorbée par Stanley Assembly Technologies).
Les cobots ont gagné leur popularité actuelle grâce à l'apparition de la société Universal Robots (Danemark) en 2005. L'idée d'un robot bon marché et facile à installer et à utiliser (par rapport à un robot industriel) est venue aux fondateurs en 2003. Après avoir réalisé plusieurs prototypes, la société a sorti en 2008 le premier prototype en série du robot UR5 (le plus populaire à ce jour) et a reçu des investissements du gouvernement danois. En 2012, la société a sorti un deuxième robot (UR10), et en 2015, il a été acquis par l'américain Teradyne pour 285 millions de dollars.
C'est après le succès d'Universal Robots que les cobots ont commencé à être fabriqués par des sociétés qui occupaient depuis longtemps et avec succès le marché des robots industriels (FANUC, ABB, KUKA, BOSCH et autres), et des startups similaires ont commencé à apparaître:
Rethink Robotics , Doosan Robotics, Techman Robot. Parmi les jeunes projets, il y a aussi des immigrants des pays de la CEI - la startup biélorusse Rozum Robotics.
Partie 3. Où et comment les cobots sont-ils utilisés
Combien de cobots dans le monde? Malgré la popularité croissante des cobots, ils n'ont pas encore été distingués dans une classe distincte dans l'étude annuelle de World Robotics, qui mène la principale source de données de l'industrie, la Fédération internationale de robotique (IFR).
Environ 2 millions de robots industriels sont actuellement utilisés dans le monde (prévision IFR pour 2017). On ne sait pas exactement combien d'entre eux collaborent. Selon une étude de Barclays, en 2017, 32000 cobots étaient en activité, dont la grande majorité a été produite par
Universal Robots .
Il y a quelques années, les cobots étaient considérés exclusivement comme des équipements de laboratoire, qui n'ont pas leur place dans la production, mais la possibilité d'une configuration flexible et des coûts d'intégration minimaux nous ont permis de surmonter la barrière psychologique. Désormais, les robots de cette classe sont utilisés dans l'industrie légère, alimentaire et même dans l'industrie automobile traditionnellement occupée par les robots classiques.
Barclays Research
estime le marché à 800 millions de dollars en 2017. Il est prouvé que jusqu'à un tiers des cobots sont
vendus en Chine . IFR a évalué le marché des robots industriels en 2017 à 13,1 milliards de dollars.
Prévisions pour les années futures:
IFR prédit la taille totale du marché des robots industriels d'ici 2020 à 23,2 milliards de dollars. Si nous comparons les estimations de Barclays et IFR, nous obtiendrons une augmentation notable de la part des cobots dans le total: de 6,1% en 2017 à 13,5% en 2020 - de manière assez dynamique.
Ce que les cobots peuvent faire:- Pick & Place: chargement de la bande transporteuse de déchargement.
- Chargement / déchargement de pièces dans des machines.
- Test et tri des pièces: vérification ou tri des objets aléatoires sur le convoyeur dans le cadre du contrôle qualité ou d'autres besoins.
- Emballage: collecte et placement d'articles dans des conteneurs pour le transport ou le stockage.
- Assemblage facile: assemblage d'électronique et d'appareils électroménagers.
- Opérations de finition: élimination de l'excès de plastique ou de métal des pièces.
Les moteurs de croissance de Cobot dans les années à venir:1. Les cobots sont moins chers que les robots industriels ordinaires (~ 25 000 $ au lieu de ~ 50 $) -> le seuil d'entrée pour les petites et moyennes entreprises (PME) est réduit.
2. Les cobots sont plus faciles à installer: il n'est pas nécessaire de pouvoir programmer. Après une journée de formation, le travailleur sera en mesure de configurer le robot pour effectuer des tâches de complexité moyenne.
Vous pouvez l'essayer vous-même . Autrement dit, il n'est pas nécessaire d'engager des ingénieurs de service ou des intégrateurs de systèmes -> le seuil d'entrée pour les PME diminue à nouveau.
3. Kobotov est plus facile à déplacer: ils sont plus faciles que les industriels, ils n’ont pas besoin d’une infrastructure locale sous forme de cage -> l’attractivité pour les PME augmente, car la production peut être rapidement rétablie.
4. L'
augmentation du coût du travail manuel due au vieillissement de la population et à la
diminution du nombre de personnes valides (taux horaire des travailleurs: 40 € en Allemagne, 12 € aux USA, 11 € en Europe de l'Est et 9 € en Chine. Le coût du cobot est de 6 $ / heure) .
5. Le rétablissement de la synergie des facteurs précédents conduit au fait que les États-Unis et l'UE renvoient la production de la Chine dans leur pays d'origine. Cela peut aider à réduire les frais d'expédition et à améliorer la qualité des produits.
6. Programmes d'État visant à l'automatisation et à la robotisation de la production. Ils peuvent stimuler et soutenir (y compris financièrement) l'acquisition et l'utilisation de robots:
- «Industrie 4.0» en Allemagne;
- "Made in China 2025" en Chine;
- "National robotics initiative 2.0" aux USA.
Partie 4. Qui produit les cobots
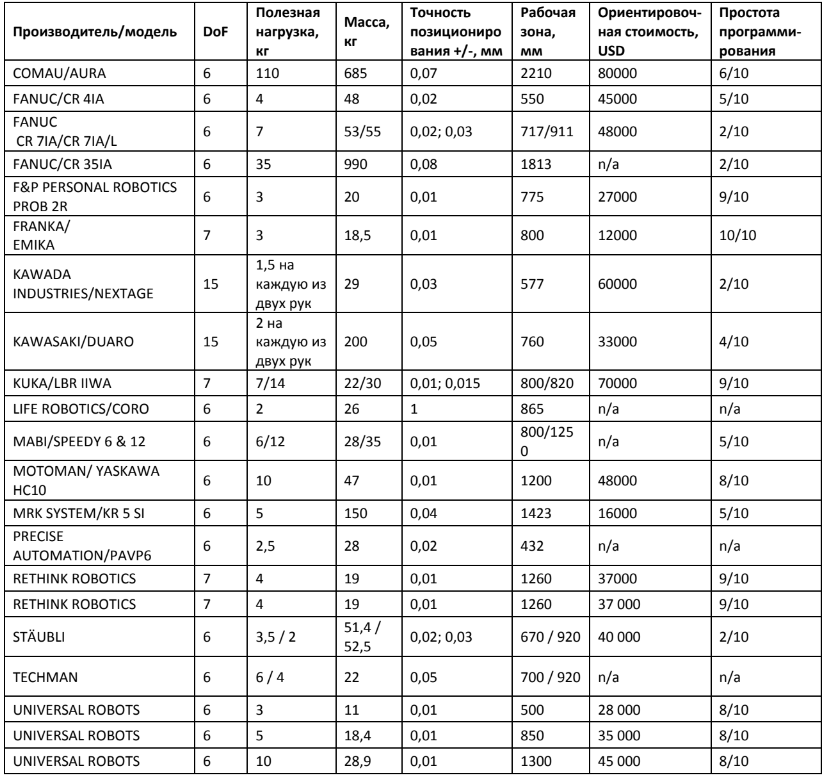 Téléchargez le tableau
Téléchargez le tableauPartie 5. Comment gagner des cobots et comment les utiliser pour résoudre vos problèmes
Comment gagner de l'argent sur les cobots:
Pour utiliser des cobots dans la résolution de leurs problèmes, il est nécessaire d'identifier les processus (tâches) potentiels pour l'automatisation. L'idéal pour la première automatisation sera des tâches répétitives avec un haut degré de certitude (prévisible).
| Juste
automatiser
| Dur
automatiser
|
Les tâches
| Déplacer des objets, suivre une trajectoire sans effort
ou avec un effort constant
| Contrôle de la force, par exemple polissage ou assemblage de précision
|
Articles
| Une petite variété d'articles (tailles, masse,
matériel), formes connues et ordinaires (cylindre, boîte)
| Une grande variété d'articles, des formes complexes,
objets déformables et fragiles
|
Disposition des sujets
| Articles empilés uniformément: dans une boîte, empilés ou sur une palette
| Les articles sont jetés dans une boîte / panier ou se déplacent
convoyeur rapide
|
Intégration avec d'autres équipements
| Utilisation des interfaces utilisées par une personne:
boutons, stylos
| Connexion et configuration de capteurs, intégration logicielle
avec des machines-outils
|
Programmation
| Mouvements répétitifs en une seule séquence (sans
conditions et arbres)
| Logique complexe et nombreuses conditions selon
informations provenant de capteurs
|
Ici, vous pouvez calculer le ROI de votre projet de robotique.L'article a utilisé la traduction des publications suivantes:
- Carole Franklin - «Présentation ISO / TS 15066: 2016»
- Roberta Nelson Shea - «ISO / TS 15066 Introduction»
- Bjoern Matthias - "Robots collaboratifs Power and Force Limiting"
- blog.robotiq.com/what-does-collaborative-robot-mean
- Robotiq - «Cobot eBook», «Premiers pas avec les robots collaboratifs», «ISO / TS 15066 expliqué»
Le texte a été préparé par Albert Efimov et Denis Zatyagov du Sberbank Robotics Laboratory