Cette vidéo est l'endroit où Marc Raibert, le fondateur de Boston Dynamics, parle des robots: BigDog, Spot, SpotMini, Atlas. Sur la base de cette vidéo et d'autres vidéos où Marc a joué, je décrirai brièvement les technologies de robot et les plans futurs de l'entreprise.
Marc Raibert a fondé Boston Dynamics il y a 25 ans, mais elle n'a pas encore mis ses robots en production. Le fondateur explique cela par le fait que l'entreprise a travaillé tout ce temps pour un développement plus rapide au-delà de l'horizon des capacités de la robotique actuelle. Néanmoins, dans ses robots, l'entreprise a atteint le niveau où il est devenu possible de fabriquer un petit robot électrique à quatre pattes capable de se déplacer indépendamment sur un terrain accidenté et des bâtiments. Par conséquent, ils vont commencer la production de masse du robot SpotMini à la mi-2019 à raison de 1000 pièces par an.
Actuellement, 10 robots sont testés par des clients potentiels, 100 autres seront livrés dans un délai d'un an.
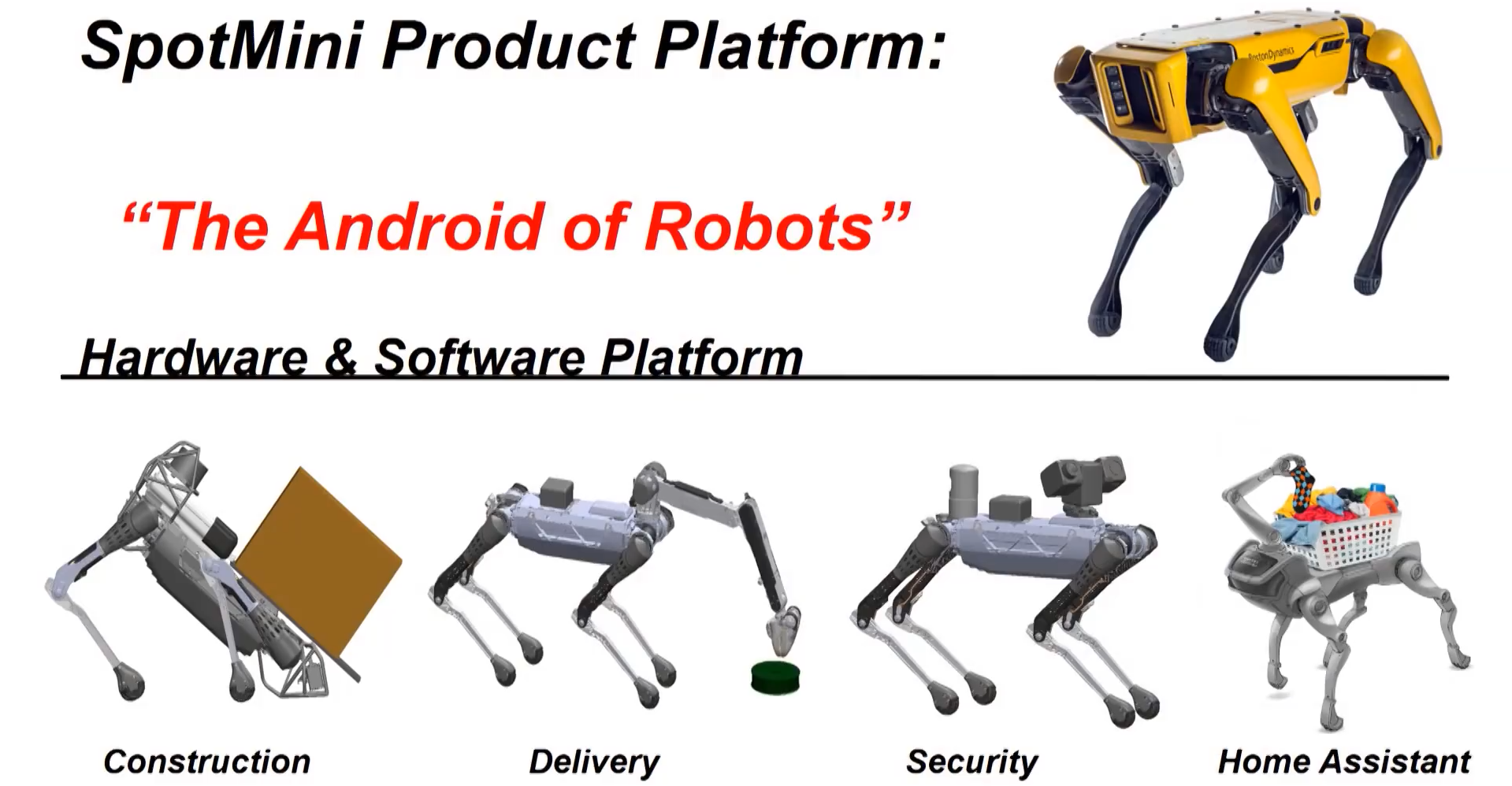
Le robot sera vendu comme une plateforme sur laquelle vous pourrez installer votre main. Il dispose d'une API avec laquelle les développeurs tiers pourront écrire leurs applications et utiliser les fonctionnalités de base du robot. Il existe plusieurs démos de ces applications dans la vidéo.
Il est entendu que Boston Dinamics a installé les fonctionnalités de base du robot, et seules des commandes de haut niveau telles que se rendre à une telle vitesse peuvent être données à l'opérateur du robot ou à un développeur tiers, soumettez une canette de Coca-Cola.
Marc affirme que le robot peut agir à côté d'une personne et est essentiellement collaboratif, ce qu'il justifie dans la vidéo pour que le robot ne pèse que 27 kilogrammes et ne puisse donc pas nuire aux humains.

SpotMini peut détecter une canette de Coca-Cola, la saisir et la transférer dans un autre endroit, ou la donner aux gens. La photo ci-dessus n'est qu'un exemple d'application pour un robot qui effectue une telle tâche.
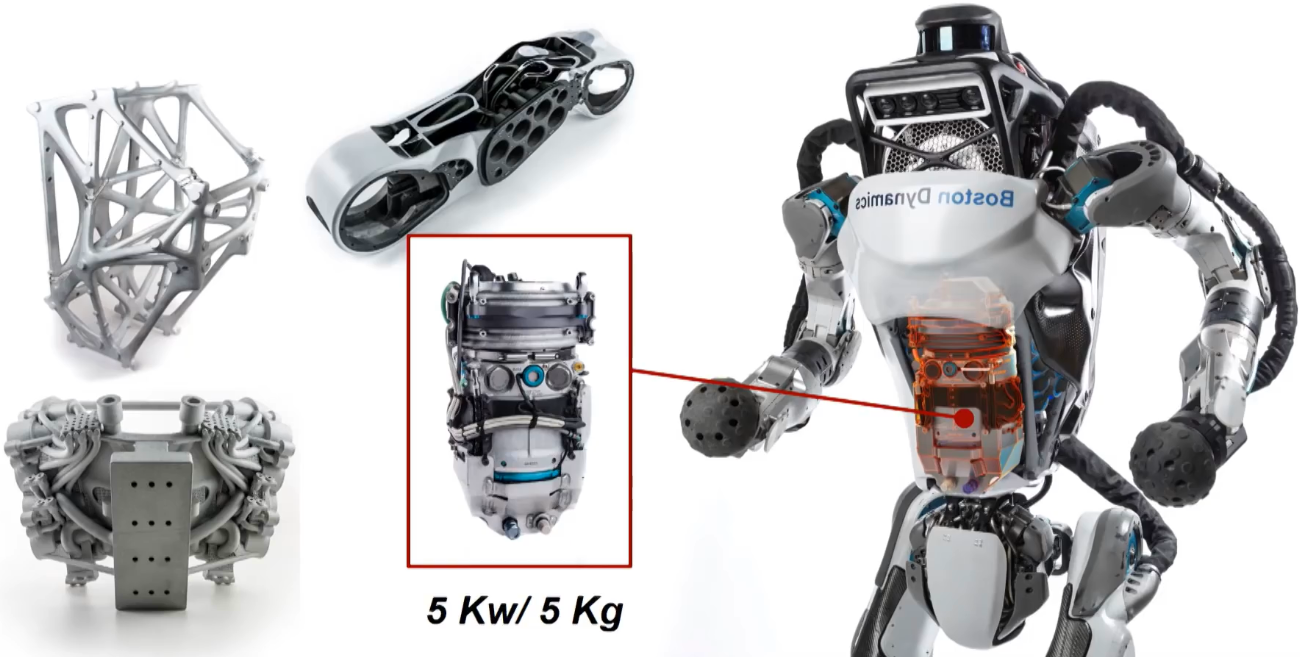
L'histoire des technologies utilisées dans le robot Atlas est également intéressante. Le poids initial du robot a été réduit de 170 kilogrammes à 75 avec le même rapport de puissance. Dans le même temps, le robot est devenu beaucoup plus agile et capable. Cela a été réalisé grâce aux nouvelles méthodes de conception et à l'impression 3D. La vidéo montre une jambe de robot imprimée sur une imprimante, qui pèse plusieurs fois moins avec la même force.
Surtout à noter sur la centrale électrique. Dans la vidéo, Marc dit qu'ils ont réussi à s'y intégrer: un moteur, une pompe, un filtre, un collecteur et une veste thermique avec une batterie dans l'estomac du robot, tandis que le poids de l'ensemble de la structure était de 5 kilogrammes avec une puissance de 5 kilowatts. Encore une fois, il dit que cela n'aurait pas été possible sans des techniques de conception avancées et l'impression 3D.


Dans une autre vidéo, il parle du robot Handle, il est prévu comme un robot logistique qui peut transporter des charges rapidement sur de longues distances, car au lieu de jambes, il a des roues.
Une petite ingénierie inverse de moi:
Dans la vidéo, Marc Raibert dit que le robot utilise 5 modules de caméra, deux à l'avant et un à gauche, à droite et à l'arrière. Ils ont apparemment refusé le lidar laser dans la version commerciale. La photo montre que le module de caméra est en quelque sorte non standard, au total, vous pouvez voir 5 caméras dans le module, peut-être plusieurs d'entre elles sont une caméra infrarouge avec un récepteur. On voit également que les deux caméras sont petites et apparemment inclinées l'une par rapport à l'autre. Si quelqu'un sait ce qu'est ce module, écrivez dans les commentaires. De tout cela, nous pouvons conclure que le robot ne peut faire qu'avec des caméras stéréo, éventuellement avec une caméra de profondeur infrarouge. L'algorithme de positionnement et de localisation est très probablement un SLAM visuel, ce qui n'est pas clair. En général, la société Boston Dinamics est plutôt fermée et ne parle pas beaucoup du logiciel de ses robots, mais sur les forums les gens qui y travaillent écrivent qu'ils ont leur propre code propriétaire, principalement en C ++ et un peu en Python. Il est fait mention de l'utilisation de Drake. Peut-être que dans le robot Atlas, le ROS était partiellement utilisé dans les compétitions.
En mécanique et calcul du mouvement des membres des robots, les recherches de Marc Raibert se poursuivent depuis qu'il a fondé le laboratoire de mouvement des pieds en 1980 et écrit le livre Legged Robots that Balance en 1986. De plus, à partir des études du MIT que j'ai décrites dans un article précédent sur le robot guépard aveugle, nous pouvons conclure que des méthodes similaires sont également utilisées dans SpotMini puisque Marc Raibert était professeur au MIT.
En fait, ce sera le premier robot suffisamment fonctionnel et complexe qui sera utilisé quotidiennement à côté d'une personne. S'il ne peut prendre qu'une canette de Coca-Cola et des sacs pour femmes, y en aura-t-il encore :)