Salut Cet appareil est applicable non seulement dans un bloc d'alimentation d'ordinateur, mais nous parlerons d'un ordinateur comme urgent :)
La technologie de processus pour la production de processeurs diminue régulièrement, et la consommation d'énergie diminue également. Les processeurs des dernières générations contiennent un système vidéo graphique adapté aux tâches quotidiennes. Si vous n'êtes pas très exigeant sur les performances dans les jeux vidéo, alors pour un budget relativement modeste, vous pouvez penser à un ordinateur silencieux qui ne produira des sons que sous une forte charge, ce qui n'arrive pas souvent.
Vient ensuite ma vision d'une configuration informatique pour le refroidissement semi-passif.
Le processeur moyen au sommet de sa charge génère 65 watts de chaleur, il peut être refroidi par un refroidisseur d'usine avec une puissance plus grande (que la normale) de 120 à 150 watts en définissant les paramètres du BIOS afin qu'il ne commence à tourner que lorsque 30 à 40% du processeur est chargé ou au-dessus de 40 ° C.
Une autre source de bruit est le disque dur, mais c'est simple, je l'ai remplacé par un SSD.
Il y avait un ventilateur d'alimentation qui tourne constamment. Vous pouvez acheter un tout à fait passif ou semi-passif au départ, mais voici le prix de la question: (à partir de 150 $) peut-être qu'il est logique d'orienter ces fonds vers une plus grande productivité?
Une alimentation ordinaire de 500 W (50 $) a une énorme réserve de puissance dans mon cas, j'ai donc décidé d'éteindre complètement le ventilateur. Mais lors d'un fonctionnement prolongé sous forte charge, les radiateurs à l'intérieur ont commencé à chauffer au-dessus de 60 ° C, il a donc été décidé de retourner le ventilateur mais de contrôler sa vitesse.
Différentes alimentations ont différentes caractéristiques de conception, peut-être dans certains cas, un flux d'air constant est nécessaire. Par conséquent, avant d'apporter des modifications à la conception de votre bloc d'alimentation, sachez que vous comprenez le processus, vous avez des mains assez «égales» et que les modifications apportées n'affecteront pas négativement le fonctionnement de votre bloc d'alimentation et de l'équipement connexe. Il arrive souvent que le bloc d'alimentation pompe l'air de l'ensemble de l'unité centrale. Toute modification peut endommager votre ordinateur!
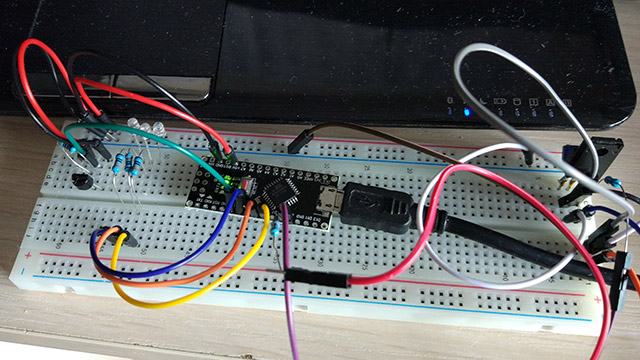
La base a été prise Arduino nano basé sur ATMEGA168PA, à partir de différents morceaux de projets d'autres personnes compilés les leurs.
Les ressources du contrôleur le permettant, il a été décidé de réaliser un indicateur LED tricolore de type LED intelligent avec différents clignotements et couleurs en fonction de la température.

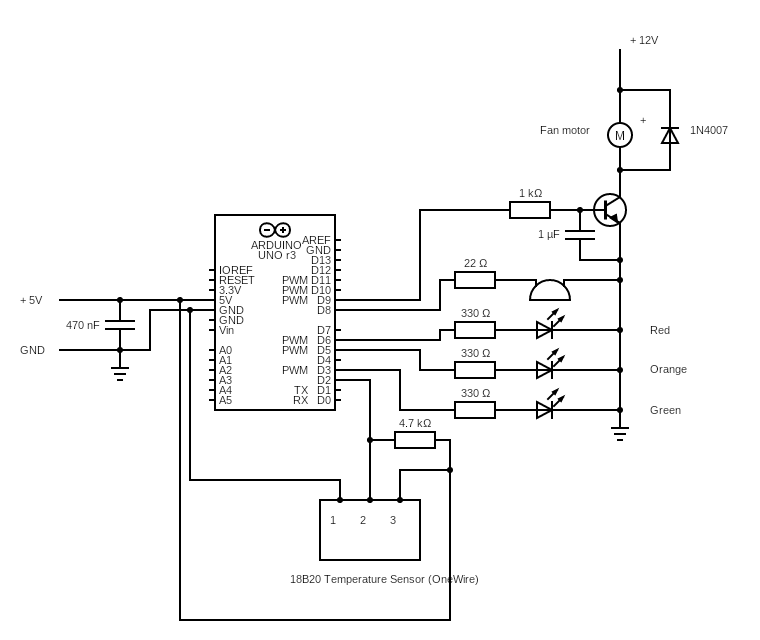
La température est mesurée par le capteur DS18B20, en fonction de la température, la vitesse du ventilateur augmente ou diminue. Lorsqu'il atteint> 67 ° C, le détecteur de son est activé. Transistor - tout NPN avec courant> courant de votre ventilateur. J'ai également essayé de contrôler un ventilateur à trois fils, tout a fonctionné, mais je n'ai pas pu l'arrêter complètement.
Initialement, il utilisait la fréquence PWM par défaut (448,28 Hz), mais à basse vitesse, le refroidisseur faisait une sonnerie à peine perceptible, ce qui ne correspond en rien au concept de refroidissement silencieux. Par conséquent, la fréquence logicielle du PWM est portée à 25 kHz. Aux vitesses les plus basses, le ventilateur ne peut pas démarrer immédiatement, donc les deux premières secondes une impulsion lui est fournie avec la vitesse maximale, puis la vitesse selon le programme.
Voici une vidéo montrant le fonctionnement de l'appareil.
Mais en fait, un sketch, je vous demande de ne pas trop taper. C'est mon premier sketch pour Arduina :)
Cliquez pour voir le code.// 2 - DS18x20 data // 3 - green LED (a 330 Ohm resistor is necessary) // 5 - orange LED (a 330 Ohm resistor is necessary) // 6 - red LED (a 330 Ohm resistor is necessary) // 9 - PWM Fan // 8 - Buzzer #include <OneWire.h> byte temp; // temperature of sensor byte greenLED = 3; byte orangeLED = 5; byte redLED = 6; byte FanSpeed = 0; int piezoPin = 8; // byte modes[] = { 0B00000001, // 0B00000101, // 0B00010101, // 0.5 0B01010101, // 0B10101010, // 0B00010101, // 0B01010101 // (4 ) }; uint32_t ms, ms1 = 0, ms2 = 0, ms3 = 0, ms4 = 0, ms5 = 0; uint8_t blink_loop = 0; uint8_t blink_mode = 0; uint8_t modes_count = 0; bool FirstRun = 0; OneWire ds(2); // on pin 10 (a 4.7K resistor is necessary) void analogWrite25k(int pin, int value) { switch (pin) { case 9: OCR1A = value; break; case 10: OCR1B = value; break; default: // no other pin will work break; } } void setup(void) { pinMode(redLED, OUTPUT); pinMode(greenLED, OUTPUT); pinMode(orangeLED, OUTPUT); pinMode(9, OUTPUT); modes_count = 1; blink_mode = modes[modes_count]; TCCR1A = 0; // undo the configuration done by... TCCR1B = 0; // ...the Arduino core library TCNT1 = 0; // reset timer TCCR1A = _BV(COM1A1) // non-inverted PWM on ch. A | _BV(COM1B1) // same on ch; B | _BV(WGM11); // mode 10: ph. correct PWM, TOP = ICR1 TCCR1B = _BV(WGM13) // ditto | _BV(CS10); // prescaler = 1 ICR1 = 200; // TOP = 320 // Serial.begin(9600); } void loop() { byte i; byte present = 0; byte type_s; byte data[12]; byte addr[8]; float celsius; if ( ( ms - ms3 ) > 1000 || ms < ms3 ){ ms3 = ms; if ( !ds.search(addr)) { // Serial.println("No more addresses."); // Serial.println(); ds.reset_search(); if ( ( ms - ms4 ) > 250 || ms < ms4 ){ ms4 = ms; //delay(250); return; } } // Serial.print("ROM ="); for( i = 0; i < 8; i++) { // Serial.write(' '); // Serial.print(addr[i], HEX); } if (OneWire::crc8(addr, 7) != addr[7]) { // Serial.println("CRC is not valid!"); return; } // Serial.println(); // the first ROM byte indicates which chip switch (addr[0]) { case 0x10: Serial.println(" Chip = DS18S20"); // or old DS1820 type_s = 1; break; case 0x28: Serial.println(" Chip = DS18B20"); type_s = 0; break; case 0x22: Serial.println(" Chip = DS1822"); type_s = 0; break; default: Serial.println("Device is not a DS18x20 family device."); return; } ds.reset(); ds.select(addr); ds.write(0x44, 1); // start conversion, with parasite power on at the end } //delay(1000); // maybe 750ms is enough, maybe not // we might do a ds.depower() here, but the reset will take care of it. if ( ( ms - ms2 ) > 900 || ms < ms2 ){ ms2 = ms; present = ds.reset(); ds.select(addr); ds.write(0xBE); // Read Scratchpad for ( i = 0; i < 9; i++) { // we need 9 bytes data[i] = ds.read(); } // Convert the data to actual temperature // because the result is a 16 bit signed integer, it should // be stored to an "int16_t" type, which is always 16 bits // even when compiled on a 32 bit processor. int16_t raw = (data[1] << 8) | data[0]; if (type_s) { raw = raw << 3; // 9 bit resolution default if (data[7] == 0x10) { // "count remain" gives full 12 bit resolution raw = (raw & 0xFFF0) + 12 - data[6]; } } else { byte cfg = (data[4] & 0x60); // at lower res, the low bits are undefined, so let's zero them if (cfg == 0x00) raw = raw & ~7; // 9 bit resolution, 93.75 ms else if (cfg == 0x20) raw = raw & ~3; // 10 bit res, 187.5 ms else if (cfg == 0x40) raw = raw & ~1; // 11 bit res, 375 ms //// default is 12 bit resolution, 750 ms conversion time } celsius = (float)raw / 16.0; temp = celsius; // Serial.println("TEMPERATURE IS:"); // Serial.println(temp); } ms = millis(); // 125 if( ( ms - ms1 ) > 125|| ms < ms1 ){ ms1 = ms; // if ( temp <= 50 ) { digitalWrite(orangeLED, LOW); digitalWrite(redLED, LOW); if( blink_mode & 1<<(blink_loop&0x07) ) digitalWrite(greenLED, HIGH); else digitalWrite(greenLED, LOW); blink_loop++; if ( temp <= 40 ) { blink_mode = modes[0]; analogWrite25k ( 9, 0); FirstRun = 0; } if ( temp >= 41 && temp <= 45 ) { blink_mode = modes[1]; // Make a push impulse for starting fan (1 sec) if ( FirstRun == 0 ) { ms5 = ms; FirstRun = 1; } if (FirstRun == 1 && (2000 > (ms - ms5))) { analogWrite25k ( 9, 33); // Fan start impulse } if (FirstRun == 1 && (2000 < (ms - ms5))) { analogWrite25k ( 9, 28); // first speed } } if ( temp >= 46 && temp <= 50 && FirstRun == 1) { blink_mode = modes[2]; analogWrite25k ( 9, 29); } } if ( temp >= 51 && temp <= 61 ) { digitalWrite(greenLED, LOW); digitalWrite(redLED, LOW); if( blink_mode & 1<<(blink_loop&0x07) ) digitalWrite(orangeLED, HIGH); else digitalWrite(orangeLED, LOW); blink_loop++; if ( temp >= 51 && temp <= 54 ) { blink_mode = modes[0]; analogWrite25k ( 9, 30); } else if ( temp >= 55 && temp <= 58 ) { blink_mode = modes[1]; analogWrite25k ( 9, 31); } else if ( temp >= 59 && temp <= 61) { blink_mode = modes[2]; analogWrite25k ( 9, 32); } } if ( temp >= 62 && temp <= 120 ) { digitalWrite(greenLED, LOW); digitalWrite(orangeLED, LOW); if( blink_mode & 1<<(blink_loop&0x07) ) digitalWrite(redLED, HIGH); else digitalWrite(redLED, LOW); blink_loop++; if ( temp >= 62 && temp <= 66 ) { blink_mode = modes[0]; analogWrite25k ( 9, 33); } if ( temp >= 67 && temp <= 70 ) { blink_mode = modes[1]; analogWrite25k ( 9, 34); } if ( temp >= 71 && temp <= 120) { blink_mode = modes[2]; analogWrite25k ( 9, 50); tone(piezoPin, 2500, 30); } } } }