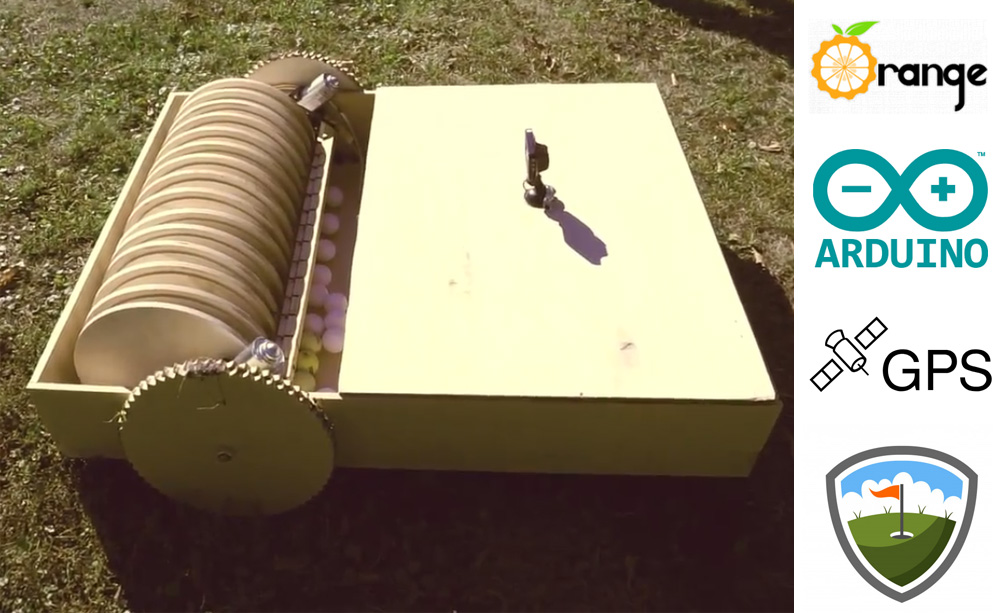
Le processus de développement d'un robot de service sur Orangepi zero et arduino pour la collecte des balles de golf. Toute la douleur d'un développeur indépendant, pas accablé de formation technique en un seul post ...
Développement MVP. Test de la vidéo.
Qu'est-ce que le golf?
Le golf est un jeu de sport. L'objectif principal est de faire rouler la balle dans le trou de chaque champ pour moins de coups, de passer tous les champs pour moins de coups. Dans notre pays, le golf est extrêmement peu développé et c'est triste. Le jeu est assez intéressant, il permet aux gens de passer du temps à l'extérieur, de communiquer pendant le jeu, adapté à tous les âges. Le jeu mesure clairement la réussite de votre handicap - un indicateur numérique des qualifications d'un athlète. Tous ces facteurs font du golf une activité de streaming. Si vous n'avez pas essayé le golf, il est temps!

Qu'est-ce qu'un practice?
Pour frapper de la première fois à la fin du terrain, plus près du trou, vous devez être capable de faire des frappes longues et précises. Le Driving Range est un terrain d'entraînement pour pratiquer les coups de golf longs et moyens. Ces champs ressemblent à ceci.

Je suis sur le practice. Ceci est une illustration de la façon de frapper incorrectement.

En une seule séance d'entraînement sur un tel domaine, ils font généralement plus d'une centaine de coups sûrs. Les mains pour récupérer ces balles étaient laborieuses et menaçaient la vie. Au début du XXe siècle, il n'y avait pas beaucoup de choix, mais dans certains endroits, le travail manuel est désormais moins cher.

Un outil à main est toujours utilisé, mais c'est plutôt l'exception.
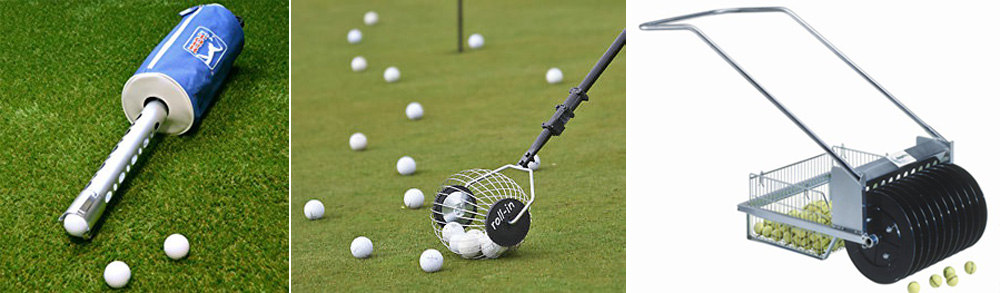
Le plus souvent, les balles sont collectées à l'aide d'un attelage spécial sur un tracteur, une voiturette de golf ou une voiture ordinaire.

Pour ramasser les balles, faites-les glisser dans la machine à laver, le chargement dans le distributeur est généralement une personne spéciale dans l'État, bien que le gardien puisse également jouer ce rôle. (Graskipper est la personne responsable de la qualité de la pelouse sur les terrains de golf).
Le développement et la mise en œuvre d'un robot de service pour la collecte des balles de golf semble être une étape raisonnable d'un point de vue économique, car il permet d'économiser la maintenance des équipements spéciaux et le salaire de l'employé qui était censé effectuer ce processus. Le golf est développé partout dans le monde, cette photo le montre clairement.
Ce jeu était particulièrement répandu aux États-Unis et en Europe, où le niveau de salaire est assez élevé et la possibilité de remplacer un employé par un robot de service porte ses fruits très rapidement.
Trouver une solution
À la suite de la recherche ont été trouvés:
quelques projets de bricolage

quelques beaux rendus
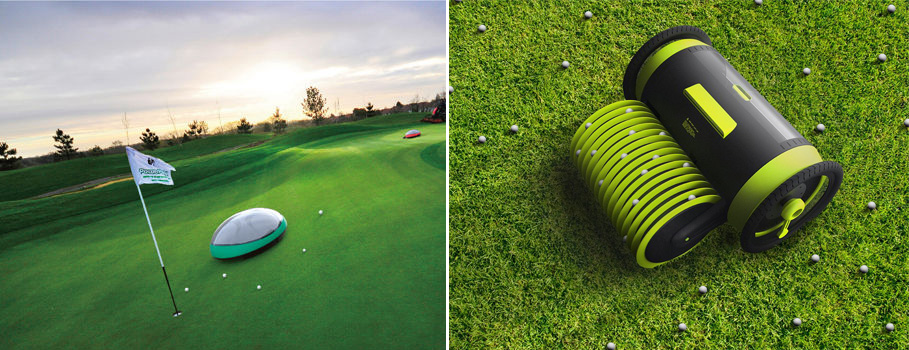
et un projet assez commercial

De cela, nous pouvons conclure qu'il y a un intérêt. Il est très probable qu'il soit très risqué d'investir dans de telles solutions de niche. Le coût de développement et d'ajustement de la production est élevé, certains moules viendront dans plusieurs dizaines de milliers de dollars. Il y a un peu plus de 40 clubs de golf en Russie, alors qu'il y en a beaucoup dans le monde, rien qu'en Allemagne, il y en a plus de 700, et au total plus de 34 000. Un robot ramasseur de billes en tant que produit ne réussira certainement pas le test de la brosse à dents chez Good Corporation.
Il est très étrange que l'administration de plusieurs clubs de golf européens avec qui j'ai parlé n'a pas entendu parler de l'existence d'un robot prêt à l'emploi, bien qu'ils aient montré de l'intérêt. Toutes mes tentatives pour entrer en contact avec cette entreprise ont été infructueuses, peut-être qu'elles ne peuvent pas faire face au nombre de commandes existantes.
Je ne sais pas exactement ce qui en résultera. Peut-être quelque part sur le chemin de la boîte de contreplaqué au premier échantillon «adulte», une compréhension viendra, que quelqu'un en ait besoin ou non.
L'objectif initial est d'obtenir un échantillon de travail sans faire attention à l'apparence. Ensuite, je prévois de donner au robot une apparence soignée et de le mettre à l'essai dans un club de golf en Russie. Après avoir débogué et effectué des tests à long terme, procédez au traitement du modèle en un modèle adapté à la production.
C'est parti!
Plusieurs avantages clés sont prévus par rapport à la solution commerciale existante.
- Pas besoin d'enterrer un câble à faible courant autour du périmètre.
- Possibilité de mise en œuvre dans les infrastructures existantes.
- Coût inférieur et coût total de possession.
Boîtier et partie mécanique
Le matériau du corps du premier échantillon était du contreplaqué sélectionné. Pas cher, vous permet de couper rapidement certaines pièces sur place ou de percer des trous. Pour que tout soit clairement ajusté, j'ai esquissé un dessin et l'ai donné au fraisage.

Rassemblé tous les détails. Dès le début, il y avait une idée pour arrondir le corps, mais a décidé de s'arrêter strictement sur MVP. Tout ce qui n'affecte pas les performances est intentionnellement exclu de la liste des tâches.

Le mécanisme de capture des balles au cours de l'évolution de ces appareils a montré son efficacité, par conséquent, d'autres options n'ont pas été envisagées.
Moteur 12V 30 N / m. sur chaque roue. Le même moteur fait tourner l'arbre avec les disques de préhension, car ils sont élevés au-dessus de la surface pour investir dans les virages et augmenter la maniabilité.

Initialement, les moteurs n'étaient pas chinois. Il n'y avait aucun moment dans la description, donc le risque était grand. Le moment n'était clairement pas suffisant, ce qui ne peut pas être dit des moteurs depuis les fenêtres.
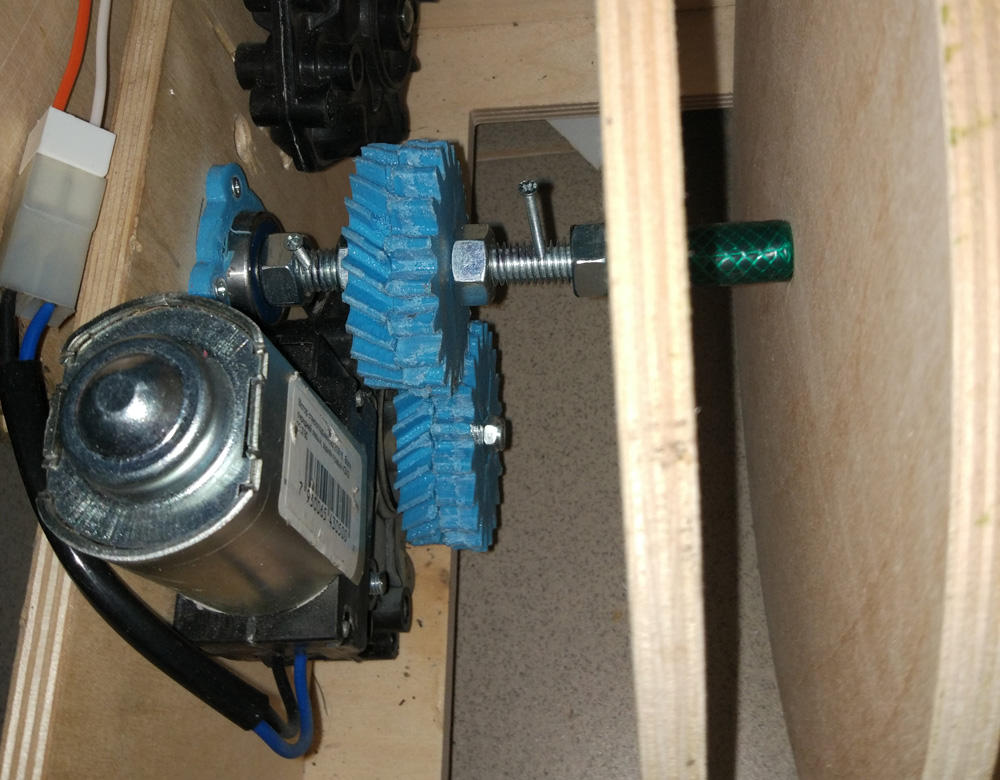
Après avoir changé les moteurs, d'autres engrenages ont dû être imprimés.
Électronique
Étant donné que le rover devrait fonctionner sans câble électromagnétique le long du contour du champ, il doit en quelque sorte naviguer et rechercher une base pour laisser tomber les balles et se recharger.
J'ai décidé d'utiliser Orangepi lite et arduino pour un travail plus pratique avec 5v sans convertisseurs de niveau zoo pour chaque capteur et pilote de moteur.
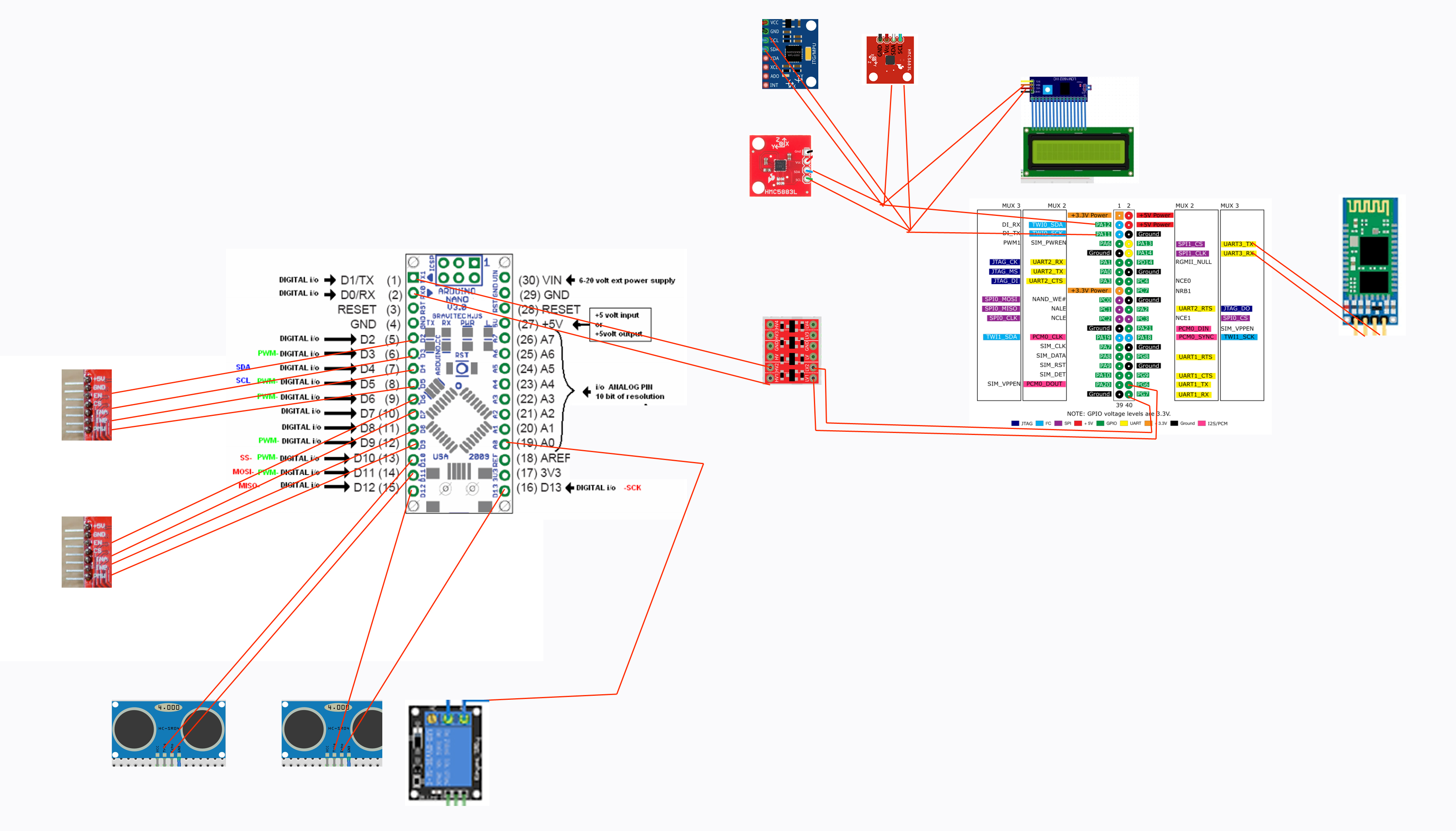
Assemblé tous les modules finis sur la planche à pain. Cela affecte le manque d'expérience dans les circuits, je pense qu'à l'avenir, il ne sera pas difficile de séparer la carte pour les modules ou les éléments discrets et de la commander.

Le schéma se compose de 11 plans, 11 Karl!
- Orange Pi Lite
- Arduino nano
- Module GPS GY-NEO6MV2
- 2 pilotes de moteur VNH2SP30
- Bluetoth Hc-06
- 2 modules à ultrasons J34
- Convertisseur de niveau logique
- Module gyroscope et accéléromètre 3 axes GY-521 MPU-6050
- Bloc de deux relais
Bien sûr, cela a été fait pour un assemblage, une installation et un remplacement rapides des modules.
Partie logiciel
Le script principal est écrit en Python. Il y a un objectif global dans le cycle du programme:
- Initialisation
- Ramasser des balles
- Retour à la base
- Charge
- Vacances programmées
- Reposez-vous sur les conditions météorologiques.
Initialisation
Lors de l'initialisation, les systèmes sont testés, le GPS est recherché, une carte de ski de fond locale est construite et un autre objectif est déterminé.
Ramasser des balles
Lors de la collecte des billes à chaque cycle, mise à jour de la carte de perméabilité locale, tracé du vecteur vers la cible géographique actuelle, interrogation du capteur de surpopulation avec des billes, interrogation de la batterie.
Retour à la base
En cas de débordement du compartiment pour épées ou épuisement de la batterie, le robot bascule la cible globale pour revenir à la base par le chemin le plus court. À proximité des coordonnées de base, une recherche visuelle de la marque est effectuée le long de laquelle se produit une orientation plus précise.
Charge, repos
La charge a lieu jusqu'à la tension de batterie requise. Le repos peut être programmé à temps ou en déclenchant un capteur de pluie.
Logement

Merci beaucoup pour la conception
habr.com/users/NikitaKhvorykLe corps de support doit être recouvert par le haut avec la partie supérieure, qui sert à protéger de la pluie et des balles qui tombent. Le premier étui décoratif que je compte réaliser en fibre de verre et époxy. Je suis prêt à écrire un article séparé à ce sujet si cela est intéressant.

Vidéo
Plans
Déjà, le rover recueille 95-100% des buts sur son chemin. Construit un itinéraire à l'intérieur du polygone en utilisant les coordonnées GPS. Les plans:
- Trouver une base pour faire tomber des balles et charger sur une marque visuelle.
- Réinitialisation de la boule servo.
- Capteur de débordement de ballon.
- Interface WEB pour l'indication visuelle des points sur la carte, construction de zones de collecte de balles à différents intervalles.
- Corps.
- Placement du robot dans un club de golf à Moscou pour un test en conditions de combat.
Des questions
Plusieurs fois après le message, j'ai reçu de la communauté habro des réponses à des questions ou des conseils qui m'ont beaucoup aidé. Tout au long de la publication, il y a plusieurs questions auxquelles j'ai vraiment besoin d'une réponse. J'ai décidé de les réunir pour plus de commodité.
- Comment faire un corps pour le robot? Il devrait être beau, sans investissement dans des moules.
- Vaut-il la peine de s'éloigner des modules et de tout faire sur une seule carte? Que faire d'un micro-ordinateur?
- Comment trouver du financement pour un projet? Où tester les échantillons?
- Je ne peux tout simplement pas trouver un exemple de filtre de Kalman pour les données GPS avec correction par magnétomètre, gyroscope. Il y a Pycalman, mais je ne comprends pas comment ajuster les données des capteurs dans la matrice. Même sur le grille-pain n'a pas trouvé la réponse. Je vous en serais très reconnaissant.
Merci de votre attention. Dans le prochain post, un test en conditions de combat. Je vais vous montrer ce qui n'est pas montré, je vais essayer de résoudre le non-résolu et découvrir tout l'inconnu!
Toujours à vous, une startup débutante, le
gestionnaire du lien du milieu , le développeur de toutes sortes de robots
1 ,
2 ,
3 ,
4 ,
5 ,
6 et gadget
1 ,
2 ,
3 . Et j'ai écrit deux histoires
1 ,
2 et pris quelques interviews
1 ,
2 ,
3 .
Je suis ouvert au dialogue, aux conseils, à l'aide, aux suggestions.