Cette publication discutera de la création d'un simple capteur de stationnement basé sur Arduino.
Un peu de théorie. Le radar Parktronic ou Parking est un appareil conçu pour suivre la distance entre la voiture et un objet, en règle générale, des capteurs de stationnement sont installés à l'arrière de la voiture.
Malgré le prix de ~ 1936 roubles, j'ai décidé de créer ma propre version de cet appareil. J'ai décidé de commencer petit, et j'ai probablement créé les capteurs de stationnement les plus simples possibles.
Et donc de la théorie à la pratique, pour l'assemblage de l'appareil nous avons besoin de 3 LED (j'ai pris des couleurs différentes, c'est plus simple et plus visuel); Émetteur piézo avec générateur *; Télémètre à ultrasons HC-SR04; Une résistance de 220 ohms avec une puissance de 0,25 watts (bien que d'autres conviennent, il n'y a pas besoin de plus de puissance) et Arduino de tout modèle.
Assemblage
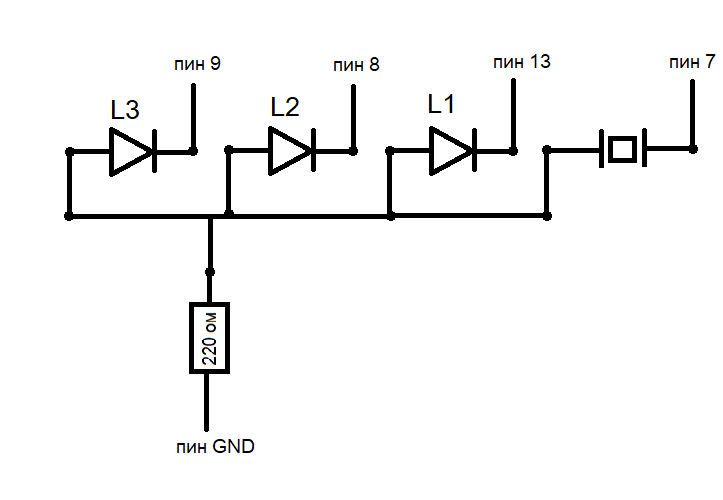
- Connectez les LED GND (-) et l'émetteur piézo et connectez-le à la broche GND via une résistance.
- Nous connectons le VCC (+) du télémètre avec la broche + 5V d'Arduino, Trig à 10, Echo à 11, et où je pense que GND est déjà clair.
OK, nous avons monté le circuit, quelle est la prochaine étape? Et puis nous écrivons un programme, pour ceux qui ne savent pas qu'Arduino est programmé en Câblage, c'est du C ++ simplifié, c'est plus simple d'utiliser Arduino IDE comme IDE.
Voici le programme:
int trigPin = 10; // Trig int echoPin = 11; // Echo int rLed = 12; // LED int yLed = 8; // LED int bLed = 9; // LED int buzz = 7; // void setup() { // pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); pinMode(bLed, OUTPUT); pinMode(yLed, OUTPUT); pinMode(rLed, OUTPUT); pinMode(buzz, OUTPUT); } void loop() { int duration, distance; // LOW Trig digitalWrite(trigPin, LOW); delayMicroseconds(2); // Trig digitalWrite(trigPin, HIGH); // 10 μs delayMicroseconds(10); digitalWrite(trigPin, LOW); // Echo duration = pulseIn(echoPin, HIGH); // distance = duration / 58; if (distance > 20) { // > 20 digitalWrite(bLed, HIGH); // LED digitalWrite(yLed, LOW); digitalWrite(rLed, LOW); digitalWrite(buzz, LOW); } else if (distance <= 20 && distance > 10) { // // 20 10 digitalWrite(yLed, HIGH); // LED digitalWrite(bLed, LOW); digitalWrite(rLed, LOW); digitalWrite(buzz, LOW); } else if (distance < 10) { // < 10 digitalWrite(rLed, HIGH); // LED digitalWrite(yLed, LOW); digitalWrite(bLed, LOW); digitalWrite(buzz, HIGH); // } delay(100); // 100 }
Je n'ai pas assemblé l'appareil fini car je travaille actuellement sur le nouveau modèle
PON-2 avec un indicateur à sept chiffres à quatre chiffres.
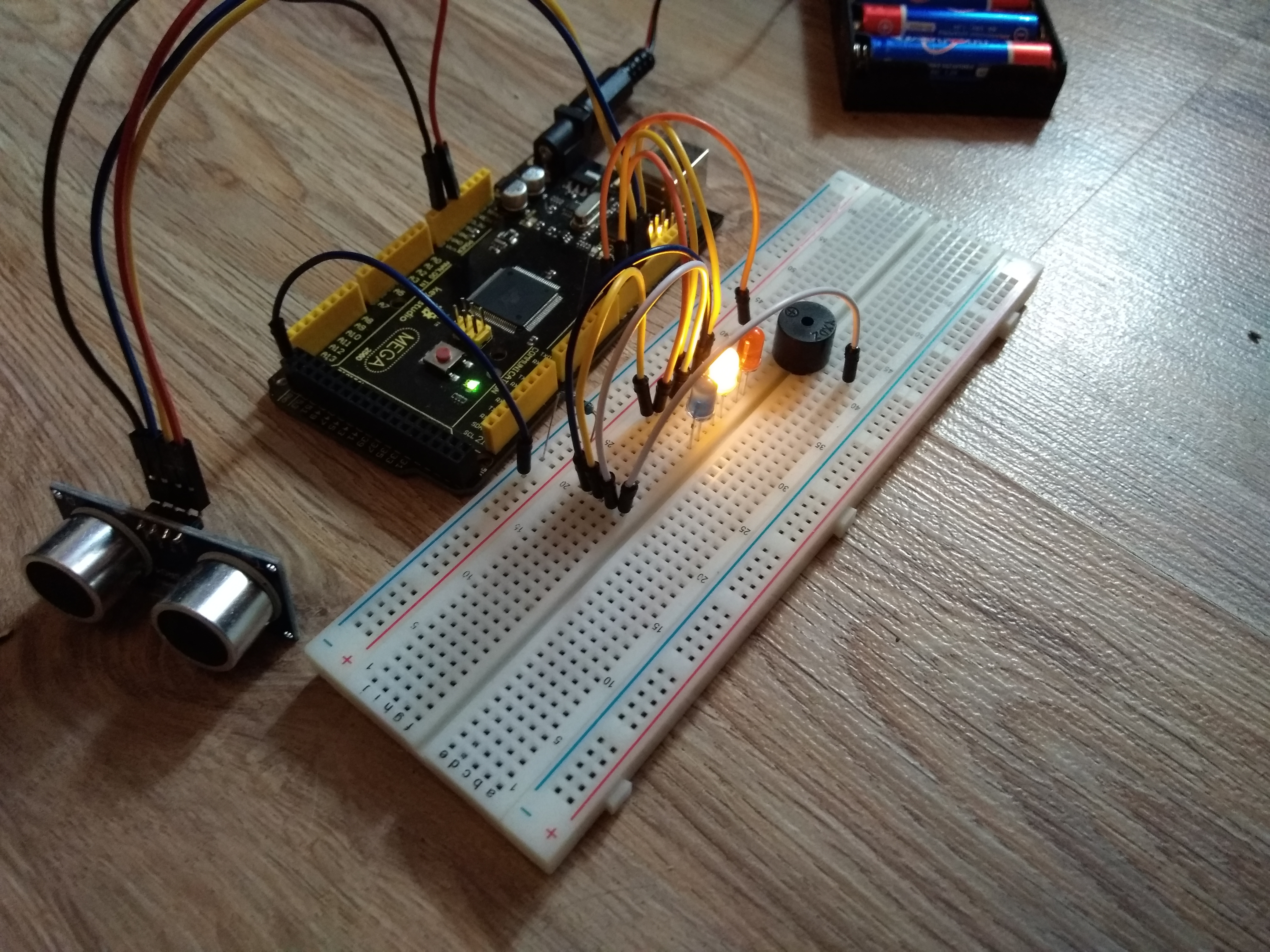
Quelques photos, vidéos et photos:
* Un émetteur piézo avec un générateur ressemble à ceci:

Étape 1:
Étape 2:

Le fonctionnement de l'appareil en images:


J'ai reçu un morceau de code de programme et des informations sur le télémètre HC-SR04 de ce
site