
Une blague pour les nerds: si vous voulez survivre au bout du monde, commencé par des robots, fermez la porte. Les robots ont réussi dans beaucoup de choses - précision, vitesse, cohérence - mais ne peuvent toujours pas faire face aux poignées de porte et à d'autres choses simples. Une partie du problème est qu'ils doivent se déplacer dans le monde entier créés pour les gens et pour les mains humaines. Et la main est l'une des structures mécaniques les plus complexes de la nature.
Cependant, les voitures seront bientôt en mesure de le faire. Des chercheurs de l'Université de Pise et de l'Institut italien de technologie ont développé un bras de robot étonnamment simple et incroyablement adroit, connu sous le nom de SoftHand 2, fonctionnant sur seulement deux moteurs. Comparez avec la Main Dexterous Shadow, hypnotiquement habile, mais alimentée par 20 moteurs. SoftHand promet aux robots que bientôt tout sera saisi, en outre, beaucoup moins cher.
Comme d'autres bras de robot, SoftHand utilise des tendons sous forme de câbles qui resserrent les doigts. Mais ils sont situés d'une manière complètement différente. Au lieu d'un tas de câbles tendus à chaque doigt, il n'y en a qu'un dans la main, se tortillant le long de l'ensemble de blocs situé dans chaque doigt. Elle a un peu moins d'agilité, mais cela réduit considérablement le coût et la consommation d'énergie. Et c'est normal - il n'y a pas de technologie universelle unique adaptée à tous les manipulateurs robotiques. Dans certains cas, des robots plus sophistiqués trouveront une application - comme SoftHand la trouvera.
Pour créer la main, les chercheurs ont d'abord créé une version plus simple de SoftHand avec un seul moteur. «L'idée est que lorsque vous allumez le moteur, la longueur du câble est réduite, ce qui entraîne une compression de la poignée», explique Robotenik Cosimo Della Santina, qui a aidé à concevoir le système.
Relâchez le tendon et les doigts se redresseront dans la paume ouverte, en raison de l'élasticité des articulations. Cela fonctionne très bien lorsque, par exemple, vous devez saisir le ballon. Mais comme les doigts bougent de manière synchrone, des manipulations plus subtiles de la main sont inaccessibles.
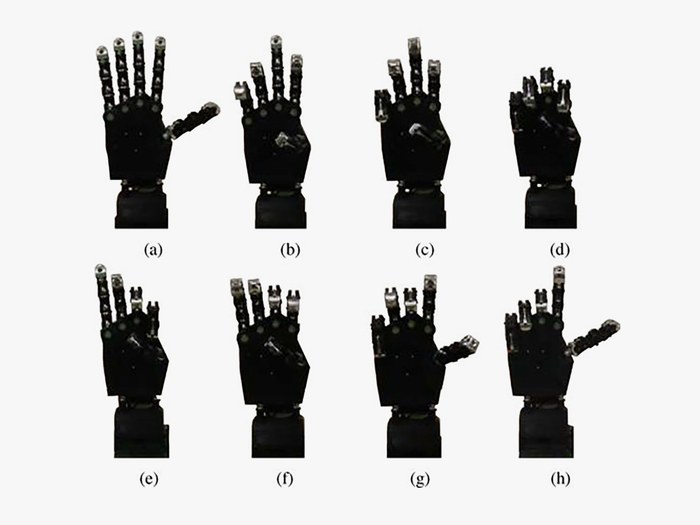
L'ajout d'un deuxième moteur augmente considérablement la dextérité de SoftHand 2. Regardez l'image ci-dessus. Chaque extrémité du câble, qui s'enroule toujours entre tous les doigts, est connectée à l'un des deux moteurs situés dans le poignet. Si vous démarrez les moteurs dans une direction, le câble est raccourci et vous obtenez des gestes de la rangée supérieure, A, B, C et D - selon le même principe qu'avec SoftHand.
Mais si vous démarrez les moteurs dans des directions différentes, vous obtenez quelque chose de plus compliqué - E, F, G et H. Dans ce cas, un moteur libère le câble et l'autre choisit. «Lorsqu'un câble se déplace dans plusieurs blocs, la tension du câble ne reste pas constante», explique Della Santina.
Si le câble tire un moteur, la tension à l'extrémité la plus proche de celui-ci sera plus importante. Si l'autre moteur libère le câble, la tension à son extrémité sera moindre. En jouant avec la tension de cette manière, vous pouvez travailler avec SoftHand avec un nombre de câbles beaucoup plus petit que celui habituellement utilisé dans les bras du robot, et faire bouger vos doigts.
Regardez l'animation ci-dessus et vous verrez la différence que fait le deuxième moteur. À gauche se trouve le seul moteur, à droite - il y en a déjà deux. Le premier fonctionne au maximum, en serrant tous les doigts autour du ballon. Le second peut fonctionner avec vos doigts de manière sélective, en raison de la différence de tension du câble. Le même principe s'applique à la capture des billets.
Étant donné la présence de seulement deux moteurs, SoftHand peut utiliser un ensemble impressionnant de manœuvres. Elle peut étendre son index pour faire pivoter la valve, ou faire glisser la feuille de la table. Elle peut même dévisser le couvercle de la boîte. Et tout cela est relativement peu coûteux. Après tout, plus il y a de moteurs, plus c'est cher.
«Pour que les robots apprennent et réalisent toutes sortes de choses intéressantes, nous avons besoin de systèmes peu coûteux, fiables et sophistiqués», a déclaré l'ingénieur en robotique Lerrel Pinto de l'Université Carnegie Mellon, qui conçoit des bras robotiques. "Je pense que leur main offre un grand compromis", ajoute-t-il, mais le vrai test sera de trouver l'utilisation réelle d'une telle main. «Peut-il être utilisé pour l'apprentissage hors ligne? Quelle est sa fiabilité, peut-il résister à des milliers de captures? Il n'y a pas de réponses à ces questions. »
SoftHand est un projet prometteur, mais des manipulateurs robotiques plus sophistiqués, comme la Shadow Dexterous Hand, ont encore quelque chose à offrir. SoftHand peut gérer des comportements stéréotypés, tels que le dévissage des couvercles des boîtes, et Shadow avec beaucoup de ses moteurs peut mieux s'adapter à des tâches complexes.
Et SoftHand fera facilement face à la salutation sur les poings.