Intro
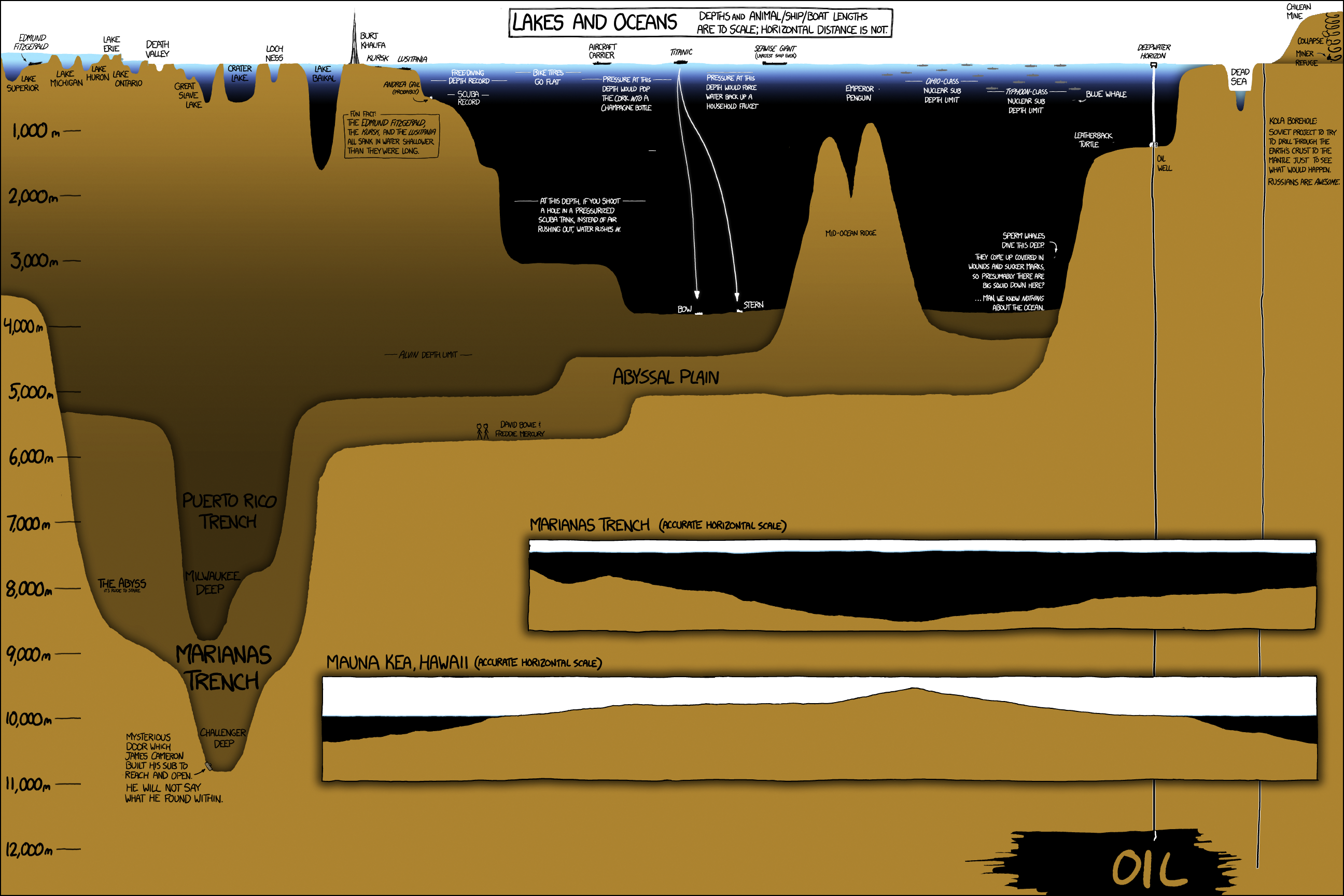
La surface de la planète est couverte à environ 71% par les océans (environ 361 millions de km²). La superficie de la Fédération de Russie est d'environ 17 millions de kilomètres. La profondeur des océans est inégale, les zones suivantes sont distinguées:
Étagère (étagère - étagère) - profondeur jusqu'à 200-500 m;
Pente continentale - profondeur jusqu'à 3500 m;
Fond océanique - profondeur jusqu'à 6000 m;
Auges profondes - profondeur inférieure à 6000 m.
La profondeur moyenne diffère également:
Atlantique - 3600 m
Indien - 3890 m
Arctique Arctique - 1225 m
Calme - 4250 m
Pourquoi un homme rampe-t-il sous l'eau?
Historiquement, d'abord pour l'alimentation (poissons, crustacés, arthropodes, algues). Ensuite, pour les travaux d'ingénierie (construction de structures hydrauliques, opérations militaires). Récemment, pour la construction d'installations linéaires (pipelines (gaz, pétrole) et câbles sous-marins) et minières (gaz, pétrole, nodules ferromanganais). Pour l'homme, l'océan est dangereux, mais utile comme source de bien.
Comment l'homme a conquis les profondeurs
Tenir la plongée
Si les plongeurs de perles et autres huîtres étaient à tout moment, la plongée à des profondeurs considérables est devenue possible à l'époque moderne. En toute justice, il est nécessaire de noter les profondeurs record de plongée des apnéistes [1]:
Plongée à poids constant avec haleine:
Hommes - 129 m (Alexey Molchanov, 2016-10-28)
Femmes - 104 m (Alessia Zecchini, 2017-05-10)
UPD:
Hommes - 130 m (Alexey Molchanov, 2018-07-18)
Femmes - 107 m (Alessia Zecchini, 2018-07-26)
Sur le site Web de l'AIDA .
Sans limites:
Hommes -
253,2 m (Herbert Nietzsc, 2012-06-06)
UPD:
AIDA n'a pas compté la tentative.
Hommes -
214 m (Herbert Nietzsc, 2007-06-14)
Sur le site Web de l'AIDA .
Femmes -
160 m (Tanya Streeter, 2002-08-17)
Il est également nécessaire de comprendre que pour obtenir de tels résultats, les gens consacrent leur vie entière à la formation, tandis que beaucoup meurent pour tenter de battre le record.
Utiliser les réalisations de la science et de la technologie pour travailler en profondeur

Machine de plongée Lesbridge
En 1715, l'Anglais John Lesbridge a construit un véhicule sous-marin, qui était déjà le prototype d'une combinaison moderne. Un homme a été placé dans un cylindre métallique avec un couvercle. Il y avait trois ouvertures dans le cylindre: deux pour les mains et une troisième - un trou d'inspection dans lequel du verre était inséré. Selon les descriptions, l'inventeur est descendu à une profondeur de 24 m et a passé sous l'eau jusqu'à 34 minutes. Utilisé une machine pour augmenter les valeurs après un naufrage.
Combinaison de plongée lourde
Nous pouvons encore souligner l'année 1819, lorsque la première combinaison de plongée lourde a été introduite par Kristian August Sieb, dont diverses modifications sont encore en usage aujourd'hui.
Par exemple, un manteau à trois boulons: cet équipement de plongée standard a été utilisé dans la marine russe et la flotte civile du 19e siècle à nos jours. Ils sont équipés de stations de plongée de bateaux de plongée en mer et de raid, de navires de sauvetage et de remorqueurs. Il n'isole pas le plongeur de la pression environnementale (eau). Equipé d'un interphone.
Le record de plongée dans la combinaison de plongée lourde qui a été trouvée était de
317 mètres [2]. Dans le cadre du développement des éléments de la tâche de cours K-2 (l'exploitation d'un seul navire en mer aux fins prévues), les spécialistes de la plongée du navire de sauvetage Igor Belousov de la flotte du Pacifique de la marine russe dans la zone de formation en eau profonde ont d'abord effectué une descente expérimentale dans une cloche de plongée à une profondeur de 317 mètres avec accès au sol.
Sur la base des résultats des descentes expérimentales jusqu'à des profondeurs allant jusqu'à 305 m, le Navy ACC et le Navy Command sont parvenus à la conclusion que, pour assurer la sécurité des plongeurs, la profondeur de descente devrait être limitée à 200 m pour les descentes en plongée de courte durée, car les plongeurs à grande profondeur restaient physiquement irréalisables et que le sauvetage indépendant des plongeurs à partir d'un sous-marin coulé par la méthode d'escalade de la bouée à des profondeurs de plus de 200 m est impossible [3].
Encore une fois, ces profondeurs sont disponibles après une formation approfondie et l'utilisation de chambres de pression pour la décompression.
Appareil Henry Fluss
Ensuite, vous pouvez mettre en évidence l'appareil Henry Fluss du brevet de 1878, qui peut être appelé SCUBA.
Équipement de plongée
En 1945, Jacques-Yves Cousteau et Emil Gagnan brevetent du matériel de plongée. L'équipement de plongée est maintenant utilisé par la plupart des amateurs de plongée, des plongeurs professionnels et des sauveteurs.
Équipement de plongée: 1 - tuyau, 2 - embouchure; 3 - Soupape (boîte de vitesses); 4 - Bandoulière; 5 - bouclier arrière; 6 - Réservoir (bouteille de gaz)
Le record de plongée appartient actuellement à Ahmed Gabr. Il a réussi à atteindre
332,4 mètres sous la surface de l'eau de la mer Rouge près de la ville de Dahab. La plongée a duré 14 heures (la remontée a probablement duré au moins 10 heures).
Et encore une fois, de tels enregistrements nécessitent une longue préparation, une chambre de pression et une grande équipe de soutien.
Quelle est la profondeur maximale à laquelle une personne peut plonger, subissant l'effet de la pression d'une colonne d'eau à cette profondeur?COMEX
534 m en eau libre 1988, Marseille, France [4], utilisant un mélange respiratoire COMEX Hydra 8 (49% d'hydrogène, 50% d'hélium, 1% d'oxygène) pour un total de 6 personnes (4 plongeurs COMEX, 2 de la Marine nationale). Au cours des 8 premiers jours dans la chambre de pression, une augmentation progressive de la pression à 53 atmosphères. De plus, les 6 plongeurs ont travaillé à des profondeurs de 520 m à 534 m. Une fois un exercice effectué pour connecter les tuyaux. Après avoir accompli les tâches prévues, les plongeurs ont subi une décompression dans une chambre sous pression pendant 18 jours.
701 m dans la chambre de pression expérimentale 1992, Marseille, France [5]. Journal d'expérience:
- 4 semaines de préparation avant la "plongée"
- Isolation deux jours à une profondeur de 10 m
- 13 jours pour atteindre une pression correspondant à une profondeur de 675 m en utilisant un mélange respiratoire COMEX Hydra 8 (49% d'hydrogène, 50% d'hélium, 1% d'oxygène).
- 3 jours de pression entre 650 m et 675 m
- Puis l'un des plongeurs, Theo Mavrostomos, est entré dans une chambre de pression séparée et a continué à plonger à une profondeur de 701 m en utilisant le mélange respiratoire COMEX Hydro 10, où il est resté pendant 7 heures.
- Puis 24 jours de décompression.
- Et 2,5 mois d'observation des participants à l'expérience.
Apparemment, la pression à plus de 700 mètres de profondeur en utilisant un mélange de gaz pour respirer est extrême.
Il existe des études sur la technologie de la respiration liquide. Pour cela, du perfluorocarbone liquide avec de l'oxygène et du dioxyde de carbone dissous est utilisé dans les expériences. À la date de publication, des expériences sont en cours sur des animaux de laboratoire.
Ici, il convient de rappeler les profondeurs moyennes des océans de 1250 m à 4250 m.
Combinaisons de plongée rigides
La prochaine branche pour conquérir les profondeurs est la création de costumes qui maintiennent la pression atmosphérique normale pour une personne et protègent contre la pression environnementale.
Selon GOST R 52119-2003: Une combinaison de plongée rigide est conçue pour les opérations d'observation sous-marine et de plongée par un opérateur sous pression interne normale (Technique de plongée. Termes et définitions).
Équipement destiné aux opérations en haute mer (jusqu'à 600 mètres), au cours desquelles la pression atmosphérique normale agit sur le plongeur, ce qui élimine le problème de décompression et élimine l'azote, l'oxygène et d'autres empoisonnements. Historiquement, les produits suivants peuvent être distingués:
Combinaison de plongée frères Karmagnol
Combinaison de plongée avec 20 petits hublots d'Alphonse et de Théodore Carmagnol, Marseille, France, 1878. La combinaison spatiale était censée pouvoir immerger une personne en toute sécurité à une profondeur de 60 m. Cependant, il n'a jamais fonctionné comme il se doit et a constamment fui. Maintenant situé au Musée de la Marine française.
Costumes "Neufeld et Kunke"
Trois générations de combinaisons de plongée par la société allemande Neufeld and Kunke, 1917-1940.
La combinaison de troisième génération (fabriquée entre 1929 et 1940) vous permettait de plonger à une profondeur de 160 mètres et était équipée d'un téléphone intégré. Le développement de la société "Neufeld and Kunke" a formé la base d'une combinaison spatiale rigide de l'italien Roberto Galeazzi au début des années 30 du siècle dernier, y compris l'adoption de la flotte militaire de l'État soviétique nouvellement formé.
1 sous-marin
1933, Mini sous-marin pour une personne. La combinaison permet au plongeur de travailler pendant un temps considérable à une profondeur de 300 mètres sans un long processus de décompression.
Combinaison Jum
Combinaison JIM 1974, Combinaison rigide. La combinaison spatiale a été utilisée dans les années 70 du siècle dernier dans l'industrie pétrolière. En 1979, une plongeuse, Sylvia Earle, a établi un record du monde dans cette combinaison spatiale. Elle a descendu 381 mètres et a longé les fonds marins pendant deux heures et demie.
Newtsuit
1985, développement dirigé par Phil Newten. Testé à une profondeur de 900 m, certifié à une profondeur de 300 m.
Exosuit
Exosuit est une combinaison de deux mètres de 240 kilogrammes en alliage d'aluminium, qui permet à une personne de travailler à une profondeur pouvant atteindre 305 mètres. Pour augmenter la mobilité et aider les bras et les jambes humains faibles, l'Exosuit est équipé de 4 moteurs de propulsion de 1,6 chevaux. (avec la possibilité d'augmenter à 8), ainsi que 18 articulations qui assurent la mobilité des mains. Les "manchons" de la combinaison spatiale peuvent être équipés de différentes buses interchangeables: pince, cutter, perceuse, etc.
Une caractéristique d'Exosuit est son support de vie entièrement autonome, tandis que l'oxygène et l'électricité sont fournis par la plupart des navires aux combinaisons sous-marines les plus similaires. Exosuit possède un système de récupération d'oxygène qui purifie l'air du dioxyde de carbone et le remplit d'oxygène. Le système a une autonomie de 50 heures. Dans Exosuit, une personne respire de l'air atmosphérique normal sous une pression normale, ce qui élimine les risques inutiles et une longue procédure de décompression. Exosuit vaut 1,3 million de dollars.
Système de plongée atmosphérique (ADS 2000)
ADS 2000 a été développé en collaboration avec OceanWorks International et l'US Navy en 1997 pour répondre aux exigences de l'US Navy. Boîtier en alliage d'aluminium forgé T6061, conception pivotante avancée. Capable de travailler à une profondeur de 610 m pendant 6 heures, il dispose d'un système autonome de survie autonome. Un double système de direction intégré permet au pilote de naviguer facilement sous l'eau. Il a été certifié par la marine américaine le 1er août 2006, lorsque le plongeur en chef de la marine, Daniel Jackson, a plongé à une profondeur de 2 000 pieds (610 m).
Même avec l'utilisation de combinaisons spatiales, une personne peut plonger à une profondeur de 610 m.
Mais qu'en est-il des sous-marins?
Les sous-marins modernes vous permettent de plonger à une profondeur d'environ 600 à 650 m.
 Cliquable
CliquableLe sous-marin nucléaire soviétique Komsomolets reste le détenteur absolu du record de plongée maximale, en 1985, le sous-marin a atteint une profondeur de 1027 mètres sous la surface de la mer. Sa valeur de fonctionnement était de 1 000 m et la valeur estimée de 1 250 m. Le sort des sous-marins s'est ensuite développé tragiquement. Komsomolets a coulé en 1989 en raison d'un grave incendie qui a commencé à une profondeur d'environ 300 mètres. Et bien que, contrairement au même Thresher, il ait réussi à se présenter, l'histoire s'est révélée très tragique.
Les bathyscaphes ont été développés pour immerger les gens à des profondeurs supérieures à 600 mètres.
Bathyscaphe
FNRS-2 et FNRS-3
FNRS-2 a été le premier bathyscaphe créé par Auguste Piccard, Suisse. Les travaux sur la création d'un bathyscaphe ont commencé en 1937 et ont été interrompus par la Seconde Guerre mondiale. Bathyscaphe a été achevée en 1948. Nommé d'après la Fondation belge pour la recherche nationale (Fonds National de la Recherche Scientifique).
La construction proprement dite du FNRS-2 a été réalisée dans les années 1946-1948. Le bathyscaphe a été endommagé lors d'essais en mer en 1948 près des îles du Cap-Vert.
Pour des essais en haute mer, le bathyscaphe FNRS-2 a embarqué sur le navire belge Scaldis de 3 500 tonnes. Cependant, le Scaldis n'était pas assez puissant pour tirer le FNRS-2 de l'eau avec des réservoirs à flotteur remplis de gaz. Une plongée d'essai sans pilote à 1 400 m a été effectuée avec succès, mais en raison de problèmes techniques, il n'a pas été possible de vider les réservoirs à flotteur de l'essence. Il a été décidé de remorquer le FNRS-2 jusqu'au port, mais le bathyscaphe a été battu par les vagues sur les côtés du navire et une fuite de gaz s'est produite dans les réservoirs à flotteur. Après avoir détecté une fuite, de l'essence a été vidangée dans la mer et le FNRS-2 a été soulevé à bord du navire. D'autres tests ont été interrompus en raison du manque de fonds pour les réparations.
Suite à l'arrêt du financement en 1948, le FNRS-2 est vendu à la Marine nationale. Des spécialistes français ont réparé FNRS-2 et renommé FNRS-3. En février 1954, le FNRS-3 atteint une profondeur de 4050 mètres dans l'Atlantique, à 160 milles de Dakar, le record précédent de Picard étant de 3150 mètres en 1953.
Trieste
Conçu en Suisse, construit en Italie, un bathyscaphe de recherche habité en haute mer. Conçu par Auguste Piccard. Trieste a été lancée dans la mer Méditerranée le 26 août 1953 près de l'île de Capri. Le projet était basé sur une expérience antérieure avec le bathyscaphe FNRS-2. Trieste était dirigée par la flotte française. Après plusieurs années d'opération en Méditerranée, Trieste a été achetée en 1958 par la marine américaine pour 250 000 $. Initialement, la zone de l'équipage était conçue pour une immersion jusqu'à 4000 m, mais la marine américaine a ordonné à Krupp de fabriquer une sphère capable de résister à l'immersion à 11000 m.
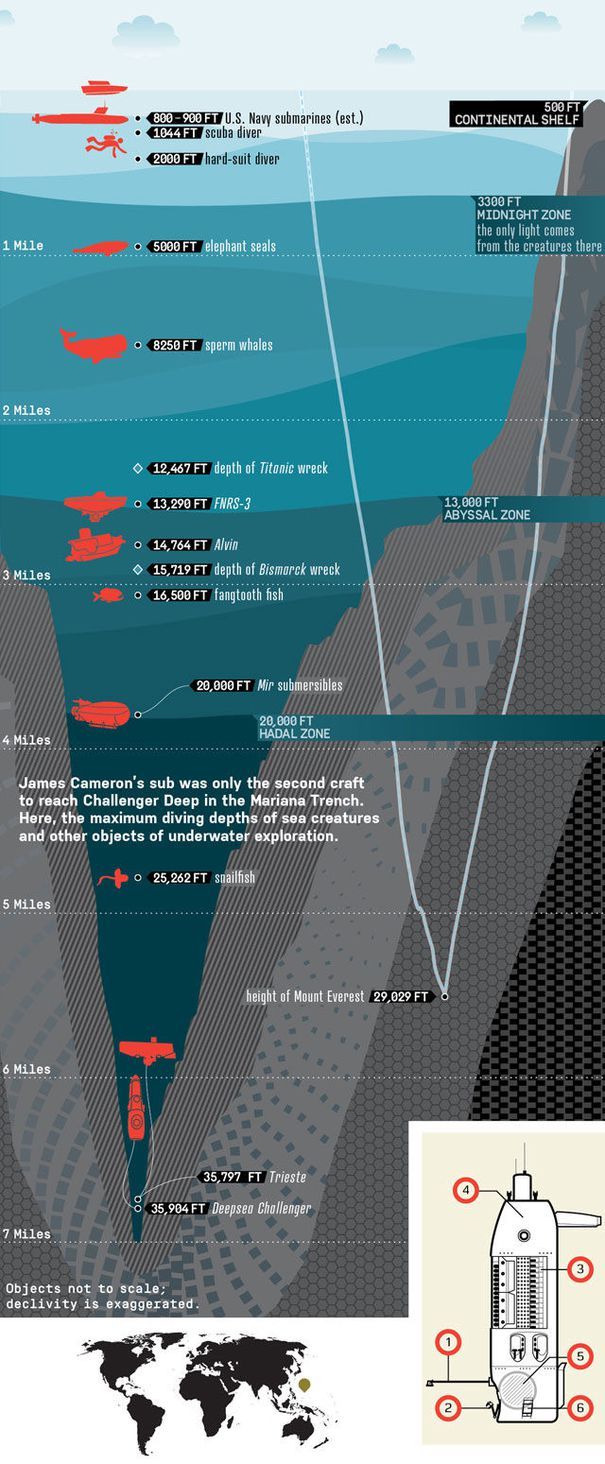
Lors de la mise en œuvre du projet Necton, le 23 janvier 1960, Jacques Picard et le lieutenant de l'US Navy Don Walsh ont plongé à une profondeur de 10 919 m. Ainsi, pour la première fois, ils ont réussi à conquérir le Challenger Abyss dans la fosse des Mariannes.
Archimède
Le développement du bathyscaphe avec le nom provisoire B11000 (Bathyscaphe 11 000 mètres) a commencé en 1957 dans l'arsenal de Toulon. Le financement a été assuré par le Centre National de la Recherche Scientifique (CNRS) et la Fondation Nationale de la Recherche Belge (FNRS). Le projet était dirigé par Pierre Wilm, le capitaine du FNRS-3, Georges Wo, a pris une part importante dans la conception. "Archimède" devait couler au fond de la fosse des Mariannes, mais le bathyscaphe "Trieste" devançait "Archimède"
Shinkai
Shinkai est un véhicule sous-marin habité, profondeur d'immersion jusqu'à 600 m. Lancé en 1970, jusqu'en 1981, il avait la plus grande profondeur d'immersion parmi les navires japonais. Détenu et géré par la Garde côtière japonaise.
Shinkai 2000 - 1981 année de construction. Profondeur ultime 2000 m.
Shinkai 6500-1990 année de construction. La profondeur maximale est de 6500 m.
Recherche 6
Le sous-marin autopropulsé hauturier du bathyscaphe type AS-7 "Search-6" du projet 1906 a été conçu par le Rubin LMBP et le Malachite SPMBM et construit à l'usine Novo-Amirauté de Leningrad en 1975-1979. Des tests de l'appareil ont été effectués en mer Noire et dans l'océan Pacifique, tandis que la profondeur d'immersion de 6 000 mètres a été dépassée. Les tests de l'appareil ont révélé ses défauts de conception importants et ont été accompagnés de défaillances répétées de l'équipement. En conséquence, en septembre 1987, le comité de sélection de l'État, compte tenu du vieillissement physique et moral de l'appareil AS-7, ne l'a pas accepté dans le cadre de la marine de l'URSS et a reconnu que d'autres travaux étaient inappropriés.
Mir-1 et Mir-2
Peut-être le bathyscaphe sous-marin le plus célèbre.

Mir-1 et Mir-2 sont deux véhicules soviétiques et russes de recherche en haute mer habités pour des recherches océanologiques et des opérations de sauvetage. Les principales idées sur la conception de l'appareil, la disposition de ses systèmes individuels, composants, éléments, sur l'acquisition d'équipements scientifiques et de navigation appartiennent à I.E.Mikhaltsev, son adjoint A. M. Sagalevich et l'ingénieur en chef du projet de la société de construction navale finlandaise Sauli Ruohonen, qui dirigeait le groupe d'ingénieurs finlandais et les techniciens qui ont participé à la construction de l'appareil. Les véhicules hauturiers ont été fabriqués en 1987 par la société finlandaise Rauma-Repola Oceanics, et le contrat pour la création des appareils a été signé le 16 mai 1985, et le certificat d'acceptation a été signé le 17 décembre 1987, après des plongées d'essai réussies dans le golfe de Botnie et l'océan Atlantique à la profondeur maximale. 6170 mètres (Mir-1) et jusqu'à une profondeur de 6120 mètres (Mir-2). La profondeur de travail des «mondes» - 6 000 mètres est d'une grande importance pour la recherche scientifique, de sorte que ces appareils peuvent atteindre des profondeurs où se trouvent 98,5% du fond des océans. Le coût de construction de chaque appareil en 1987 s'élevait à 100 millions de marks finlandais (17 millions d'euros).
Jiaolong
Jiaolong est un véhicule chinois habité en haute mer sans flotteur. Au cours de la période du 31 mai au 18 juillet 2010, il a effectué 17 plongées en mer de Chine méridionale, dont la plus profonde - jusqu'à une profondeur de 6759 mètres. Cet événement a fait de la Chine le cinquième pays après les États-Unis, la France, la Russie et le Japon, qui dispose d'une technologie moderne pour plonger à plus de 6500 mètres de profondeur.
Deepsea challenger
Deepsea Challenger (DCV 1) est un bathyscaphe où, le 26 mars 2012, le réalisateur canadien James Cameron s'est plongé dans le Challenger Abyss (Mariana Trench). Le sous-marin a été construit à Sydney, en Australie, par Acheron Project Pty Ltd., une société de recherche et développement. et contient des équipements scientifiques et des caméras 3D haute résolution. Deepsea Challenger a été construit en secret en Australie, en collaboration avec National Geographic et soutenu par Rolex. Le Scripps Institute of Oceanography, le Jet Propulsion Laboratory et l'Université d'Hawaï ont aidé à la construction du bathyscaphe et à la mise en œuvre de la mission. L'ingénieur en construction était l'ingénieur australien Ron Allum. Le coût estimé de l'appareil est de 7 millions de dollars.
Dans le bathyscaphe, une personne peut plonger à n'importe quelle profondeur dans l'océan et même effectuer des manipulations sur l'eau et élever quelque chose, mais le coût du bathyscaphe lui-même et son entretien sont assez élevés.
Exploiter la puissance de l'océan.
La photo montre brièvement les principaux domaines de travail dans l'océan, sans compter les opérations de recherche et de sauvetage:- la culture et la récolte de fruits de mer (poissons, crustacés, arthropodes, algues);
- production et transport d'hydrocarbures (pétrole, gaz, hydrates de gaz);
- extraction et transport de minerai à partir de nodules de ferromanganèse;
- enfouissement de déchets dangereux;
- construction et réparation de structures linéaires (câbles sous-marins à fibres optiques, câbles électriques sous-marins, pipelines);
- recherche d'objets sous l'eau et cartographie.
Construction et réparation de structures linéaires
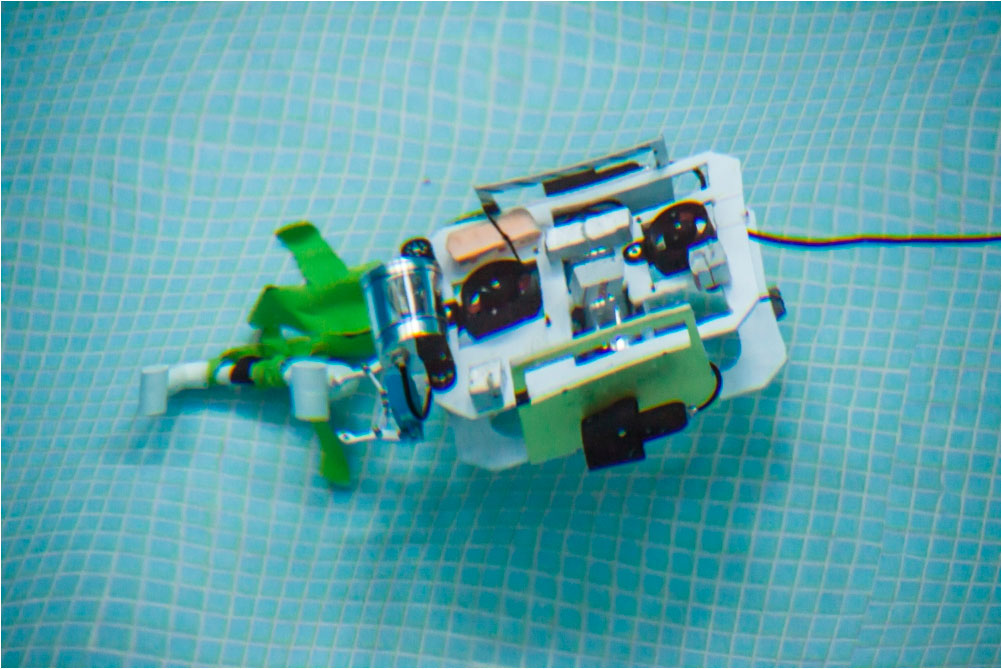
La compagnie d'électricité espagnole Red Eléctrica de España a mis en place un système de transport d'électricité à courant continu haute tension (HVDC) reliant l'île de Majorque à un système énergétique unifié en Espagne continentale.Un réseau de 244 kilomètres de lignes électriques à haute tension continue relie la région de Morvedre (près de Valence) au village de Santa Ponsa, situé à côté de la capitale de Majorque - Palma de Majorque. Une puissance électrique de 400 MW est transmise par un câble longeant le fond marin, les pertes pour la transmission en courant continu sont minimes: 250 kW.Comme on peut le voir sur la figure, lors du travail en profondeur, des mécanismes spéciaux ont été utilisés. Pour la pose des câbles, un appareil spécial capjet [6] est utilisé, la pose est contrôlée par des véhicules sous-marins télécommandés (ROV) inhabités.Autour de la même chose, il y a une pose de câbles de communication:L'opération visant à soulever le chasseur F14 Tomcat d'une profondeur de 1 140 m près de la côte mexicaine. Pendant l'opération, des véhicules sous-marins télécommandés ont été utilisés.Dégager le fond des surprises de la guerre lors de la construction du ruisseau nord:Production pétrolière offshore:De façon approximative également, avec l'aide de dispositifs télécommandés, le champ Shtokman est en cours de développement.Ainsi, l'appareil semble vivant:Alors ils le contrôlent:Et voici ce que voit l'opérateur en même temps:Les dispositifs télécommandés (ROV) sont produits dans différentes classes avec différentes profondeurs d'immersion. Il y a ceux qui peuvent être abaissés à 4000 m, il y a ceux qui ne peuvent pas dépasser 300 m, leur coût diffère également par des ordres de grandeur. Si les appareils qui conviennent pour travailler à de grandes profondeurs coûtent 1 million de dollars, alors les appareils qui fonctionnent à des profondeurs allant jusqu'à 300 m coûtent plusieurs dizaines de milliers de dollars en conception industrielle.En plus des véhicules télécommandés, des véhicules sous-marins autonomes non habités (AUV) sont utilisés. Ils sont principalement utilisés pour des opérations de recherche, jusqu'en juillet 2018, à partir de 2014 dans l'océan Indien, l'avion manquant des compagnies aériennes malaisiennes a été recherché à l'aide de tels appareils.Les véhicules sous-marins autonomes sont utilisés pour surveiller l'état des structures linéaires sous-marines (pipelines, câbles), pour cartographier la surface inférieure et effectuer des recherches sur une grande surface. La plupart des appareils autonomes sont réalisés sous la forme d'une torpille afin de réduire la résistance frontale de l'eau et ainsi augmenter la durée de travail sous l'eau avec une seule charge de batterie.
Extraction de nodules de ferromanganèse
Les nodules de ferromanganèse sont des constrictions minérales authigènes d'hydroxydes de fer et de manganèse, ainsi que d'autres éléments au fond des lacs, des mers et des océans. Le plus largement distribué dans les régions pélagiques des océans. Étudié pour la première fois par l'expédition anglaise sur le navire Challenger en 1872-1876. Des informations détaillées sur les nodules ferromanganais (distribution spatiale, faciès de formation, pétrographie, minéralogie et géochimie) ont été obtenues à la suite d'études sur le fond des océans menées par des chercheurs de divers pays (Grande-Bretagne, CCCP, USA, Allemagne, Japon, etc.) au cours de l'Année géophysique internationale (1957-1958) et les années suivantes.
Les réserves estimées des trois océans sont de 200 milliards de tonnes, l'océan Atlantique en contient 45 milliards, le Pacifique - 112 milliards de tonnes, l'océan Indien - 41 milliards de tonnes. On trouve des dépôts qui se produisent à une profondeur relativement faible et sont des variétés typiques de gisements de manganèse. à une profondeur pouvant atteindre 400 mètres au large des côtes de Bahia, de la Californie et du Japon. Les nodules au large des côtes du Japon sont situés à une profondeur de 100 à 360 mètres sur la couche supérieure des fonds marins le long de l'archipel d'Auzu près de Tokyo.
Nautilus Minerals Ltd. construit un navire spécial pour le traitement du minerai provenant du fond de l'océan [7].
Les nodules ferromanganais de l'océan mondial contiennent en moyenne les composants de minerai suivants (%): Na 1 9409; Mg 1,8234; Al 2,82; Si 8,624; P 0,2244; K 0,6427; Ca 2,47; Ti 0,647; V 0,0558; Cr 0,0035; Mn 16,02; Fe 15,55; Ni 0,480; Co 0,284; Cu 0,259; Zn 0,078; Sr 0,0825; Zr 0,0648; Mo 0,0412; Tl 0,0129; Pb 0,0900. La présence d'Ag, Ir, B, Cd, Yb, W, Bi, Y, Hg et d'autres éléments dont les concentrations sont nettement supérieures aux valeurs moyennes de la croûte terrestre est caractéristique. Selon le contenu moyen des principaux composants du minerai (Ni, Cu, Co, Mn), les nodules de ferromanganèse dans les différentes régions étudiées sont comparables aux minerais de gisements développés sur les continents.
En surface, le minerai ressemble à ceci:
Très vite, ils promettent d'établir une production industrielle.
Intérêt
En général, les véhicules ou robots sous-marins depuis 2015 sont considérés comme le nouveau bord d'attaque des robots (The Next Big Drone Frontier) [8].
Le marché UUV devrait atteindre 5,20 milliards de dollars d'ici 2022, avec un TCAC de 14,07% de 2017 à 2022. La croissance du marché peut s'expliquer par l'augmentation du nombre de production de pétrole et de gaz en haute mer et par une augmentation des menaces à la sécurité maritime.
En général, l'intérêt pour la robotique sous-marine est assez élevé aux États-Unis, en Chine, dans l'UE et à Singapour.
La recherche sur les brevets le confirme.
Géographie des pays ayant déposé des brevets dans le domaine de la robotique sous-marine:
Répartition par nombre de candidatures soumises:
On peut voir que la Chine est désormais en première place et dans quelques années, nous verrons des développements dans le fer et plus loin dans la croissance des indicateurs économiques.
Segmentation des technologies utilisées dans ce domaine:
Liste des fabricants de robotique sous-marine .
Naturellement, le travail se fait avec les élèves et les écoliers. En effet, au cours des prochaines années, tous ces développements iront dans l'industrie et des spécialistes devront travailler avec les véhicules sous-marins en cours de création.
Un indicateur de la disponibilité de ces travaux est la présence de concours de robotique sous-marine:
- MATE International ROV Competition (annuel depuis 2002)
- Concours AUVSI RoboSub (annuel depuis 1997)
- Singapore AUV Challenge (annuel depuis 2013)
- Student Autonomous Underwater Challenge-Europe (SAUC-E) (annuel depuis 2006)
MATE International ROV Competition
La compétition la plus massive. Aux États-Unis, environ 600 établissements d'enseignement déclarent participer aux tours de qualification. Ils sont divisés en concours scolaires et étudiants dans différentes classes:
- Explorer - étudiant
- Ranger - lycéens;
- Navigateur - lycée;
- Scout - élèves du primaire.
Les équipes de Vladivostok réussissent:
Équipe russe aux compétitions internationales de robotique sous-marine (2009)L'équipe DVFU ROV 2010L'équipe russe est devenue double championne du monde de robotique sous-marine (2012)2013 annéeCentre de développement de la robotique des écoliers (2015)Élèves et étudiants Robotics Development Center (2018)ROBOSUB
Le concours le plus prestigieux pour les étudiants. Parrainé par la Fondation UAV et l'Office of Naval Research. Des équipes d'étudiants du monde entier y participent. En 2018, les Chinois ont remporté la Harbin Engineering University, deuxième place à l'Université nationale de Singapour. Effectuer avec succès des étudiants de la FEFU et de l'Université d'État de Moscou. Nevelsky.
Reconnaissance du RoboSub 2012 au combat et atteignant la finaleSingapour AUV Challenge
Compétition en véhicules sous-marins autonomes. Des étudiants de pays d'Asie-Pacifique y participent. Effectuer avec succès les étudiants de FEFU.
Student Autonomous Underwater Challenge-Europe
Malheureusement, je ne connais pas les participants de Russie.
Qu'avons-nous?Jusqu'à 600+ équipes, comme aux États-Unis, sont encore loin, mais il y a aussi un intérêt:
- MATE ROV Competition Vladivostok (tour de qualification pour le grand MATE, depuis 2015);
- VRO Waterborne IRS (à Innopolis depuis 2016);
- Profil d'eau de l'Olympiade NTI (depuis 2017);
- Les premières compétitions panrusses de robotique sous-marine Vladivostok 2018 (août-septembre 2018);
- Le premier concours de robotique sous-marine pour les élèves des niveaux 1 à 4 (2018-2019).
MATE ROV Competition Vladivostok
Tenue à Vladivostok sur la base du bassin de l'Université d'État de Moscou. Nevelsky.
Inscription de décembre à mars .
Description
ici .
Nouvelles
ici et
ici .
Vidéo
ici .





VRO Water IRS
Ils ont eu lieu dans le cadre de la finale de l'
Olympiade pan
-russe de robotique à Innopolis fin juin. Pour 2019, on ne sait pas encore si Innopolis organisera la finale du BPO.
L'inscription débute au printemps .
Profil d'eau de l'Olympiade NTI
L'enregistrement a déjà commencéLes premières compétitions panrusses de robotique sous-marine Vladivostok 2018 (Aquareobototech 2018)
Déjà parti. Vous pouvez les lire
ici et
ici .
Voir
ici .
Le premier concours de robotique sous-marine pour les élèves de la 1re à la 4e année
Les règles du concours
ici .
L'inscription se termine le 30 septembre .
Offrir
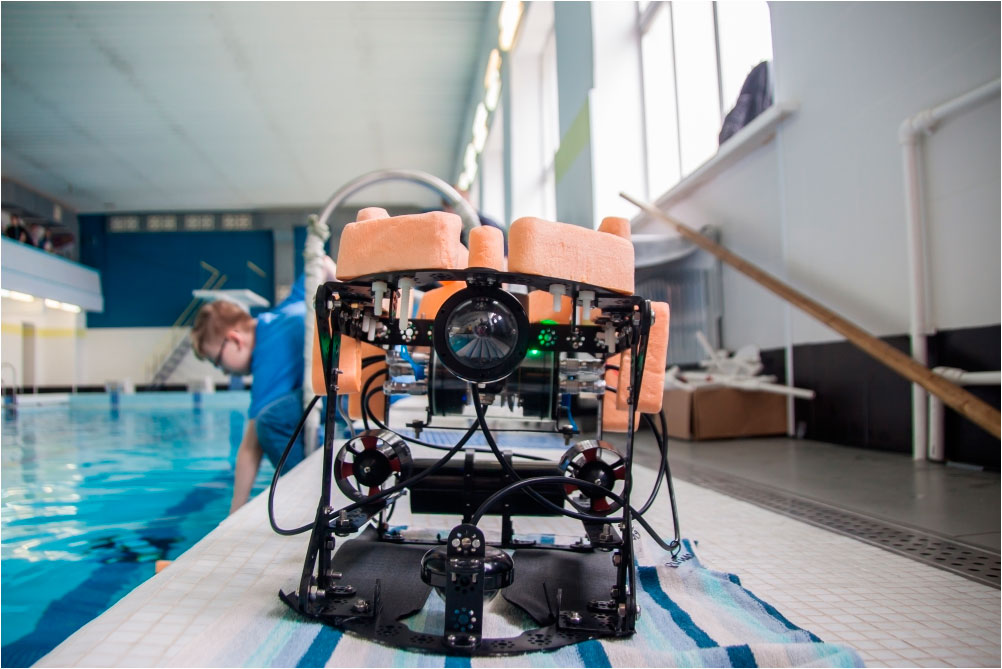
Nous pouvons offrir les ensembles suivants pour la robotique sous-marine:
- Micro Underwater Robot ( MUR ) - Un ensemble recommandé pour NTI et VRO.
- Kit d'Assemblage de Robot Telecontrol MUR MiddleROV
- Kit d'assemblage de robot de téléconduite MUR ElementaryROV
- MUR HighROV - pour participer à MATE (sur commande)
Plus d'informations sur le
site du Center for Robotics