Dans le cadre de ceAprès le démarrage d'urgence de l'Union, le distingué
Zelenyikot a rédigé un
post- toast inspirant pour la santé du programme spatial. Et voici ce que les commentaires ont trouvé:
Un nombre important de citoyens de Khabrovsk pensent que le développement de l'astronautique est principalement le développement de l'astronautique
habitée . Il en était ainsi dans le passé, et il devrait en être ainsi à l'avenir.
Dans le même temps, de nombreux habitants de Khabrovsk pensent que les programmes spatiaux habités, en particulier le travail des équipages de l'ISS, stimulent puissamment le développement de nouvelles technologies et de la science en général. Les gens en orbite font quelque chose d'intelligent, de complexe et de très, très important. Et encore plus de gens incroyablement intelligents travaillent dans des laboratoires terrestres, fournissant ces expériences: ils réfléchissent, traitent les données inestimables obtenues, créent des outils de précision astucieux au bord de la science-fiction, sans lesquels ces expériences ne peuvent pas être menées ...
Je propose de voir comment tout cela fonctionne
réellement - sur un exemple concret.

Résumé: divers, manque de tolérance, nenashi. Et un peu de toilettage de l'espace. (+ Critique - offre!)
La partie réelle, TTX - Un peu d'analyse: ce qui est caché derrière le TTX, comment est la cible des drones à l'intérieur de la station orbitale, et quel est leur sort sur le vrai ISS; pourquoi il se révèle - Et comment cela pourrait-il être? Grimper dans les fantasmes se transformant en nouvel an1. Présentation du drone1.0. Lieu: ISSPourquoi l'idée des drones est-elle attrayante sur l'ISS?
Il suffit de rappeler les principales revendications des drones lorsqu'ils sont utilisés à terre:
- très bruyant;
- temps de vol court.
Le premier et le deuxième, car les moteurs du drone doivent faire face à la gravité. Les moteurs sont obligés de travailler au-dessus d'un certain seuil de puissance (sinon le drone ne décollera tout simplement pas). Les moteurs électriques consomment rapidement la batterie; Des enroulements et des vis chargés fouettant de l'air à grande vitesse créent un son net et puissant.
Sur l'ISS, où il n'y a pas de gravité, les moteurs peuvent fonctionner aussi faiblement qu'ils le souhaitent. Vous pouvez consommer très économiquement la batterie; il n'y aura pas de bruit fort.
De plus. Étant donné que l'ISS lui-même est un endroit assez bruyant (ventilation forcée, nombreux racks avec des équipements en fonctionnement constant, systèmes de maintien en vie et maintien de l'orientation de la station - la consommation totale est d'environ 50 kW), le drone, avec un fonctionnement moteur modéré, bien que formellement il fasse du bruit, mais en pratique ses objectifs peuvent être considérés comme silencieux. Ce ne sera pas une autre nuisance sonore gênante pour les gens de la gare.
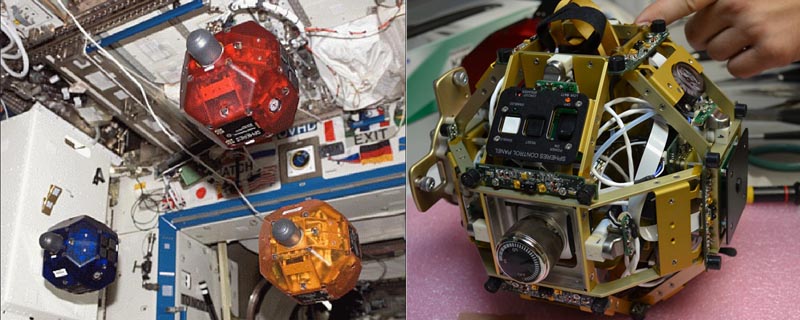
1.1. Sphères (USA)Selon le passeport, avec le jeu des acronymes: SPHERES (Satellites d'expérience de ré-orientation de maintien de position synchronisée). Propriété de la NASA. Créé au MIT par la subvention DARPA.
Poids: 4,3 kg.
Taille: 22 cm.
 (Sources de documents graphiques: NASA, JAXA, ESA.)
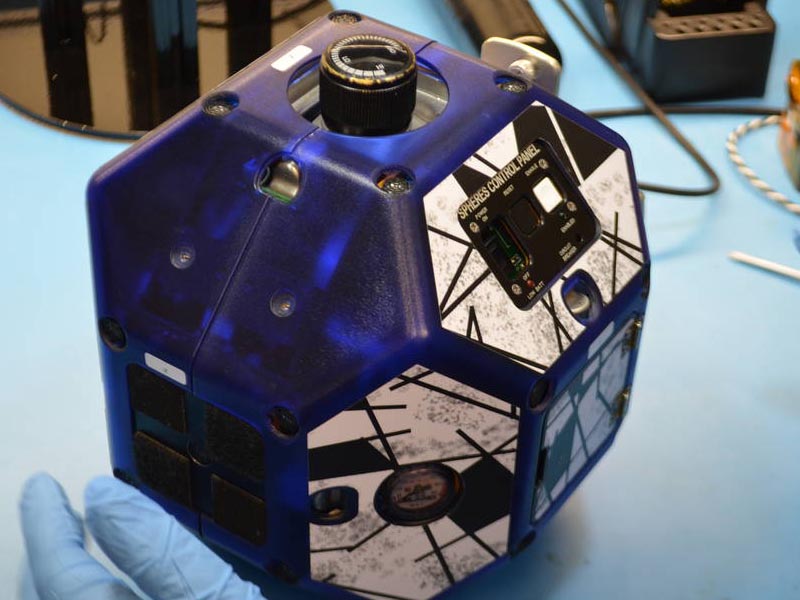
(Sources de documents graphiques: NASA, JAXA, ESA.)Plusieurs drones identiques, dont trois sont tombés en orbite: bleu, rouge et orange. First Blue, en 2006. Un peu plus tard, le reste, avec un firmware amélioré.
Ce ne sont pas tout à fait des drones dans le sens où nous mettons des «drones» sur terre, c'est-à-dire principalement des hélicoptères amateurs (quadro) ou professionnels (hexo, octo). Les sphères ne sont pas des hélicoptères. Ils n'ont pas de vis, mais des buses. Propulsion par jet pur, gaz comprimé.

Le cylindre est chargé à 170 g. De là, le gaz est distribué à 12 buses. Accélération maximale: 17 cm / s
2 en mouvement, 3,5 rad / s
2 en rotation.
Mais c'est précisément ce que sont les accélérations maximales, en fonctionnement normal, les accélérations ne sont pas à peu près les mêmes. Dans les expériences réelles, les sphères se déplacent
de manière très lente .
Communication complète: canaux radio à des fréquences de 868 et 917 MHz.
Alarme: signal infrarouge.
Capteurs: récepteurs à ultrasons.
Il n'y a pas de caméras vidéo, mais des supports sont fournis pour le kit carrosserie. Au début, l'unité VERTIGO a été utilisée comme caméra vidéo, dont la base est deux caméras pour créer des images stéréo. Ensuite, lorsque les smartphones se propagent, juste un smartphone.

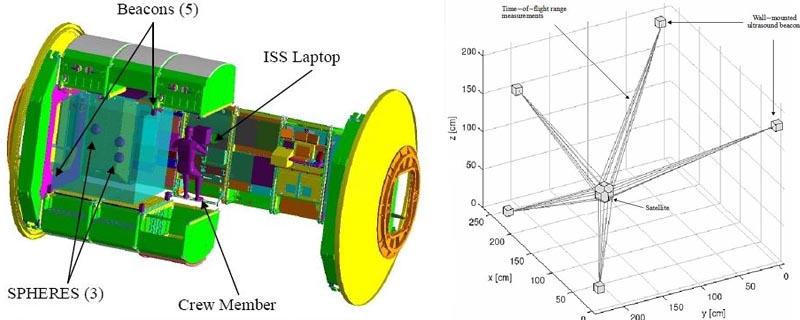
Au départ, la navigation se faisait sur des récepteurs à ultrasons. Ce ne sont même pas des capteurs de distance, ils n'émettent pas eux-mêmes d'ultrasons. Pour cela, 5 balises ont été fixées à l'intérieur du laboratoire américain. Lorsque vous devez déterminer votre position, Sphère émet un flash infrarouge. C'est un signal pour les balises. Ils se relaient, avec des retards différents, donnent un signal ultrasonique. La sphère capte ces cinq signaux. Le délai différent initial est nécessaire pour que les signaux ne se chevauchent pas et que l'analyse soit aussi simple et fiable que possible - par conséquent, les balises n'ont même pas de signatures différentes. L'heure réelle d'arrivée du signal permet de calculer le retard secondaire associé à la distance de la sphère à chacune des balises.
Tout est aussi simple que possible. Peut-être parce que les élèves ont commencé à se développer, ce qui a été pris faiblement par leur superviseur, rappelant un
épisode d'un célèbre film pour enfants .
Les développeurs considéraient la partie électronique des drones comme l'endroit le plus vulnérable - à cause du rayonnement cosmique. Mais les drones ont passé plus de dix ans à la station, et des problèmes sont survenus avec le système de distribution de gaz aux buses. Cependant, il s'est avéré déjà sur le terrain, lors de la réparation du Blue, lancé sur le "Dragon".
Des symptômes similaires, pas si graves, ont dépassé Orange, mais jusqu'à présent, il reste à la station.
1.2. Ballon (Japon)Int-Ball (caméra à balle interne). Propriété JAXA.
Poids: 1,4 kg.
Taille: 15 cm.
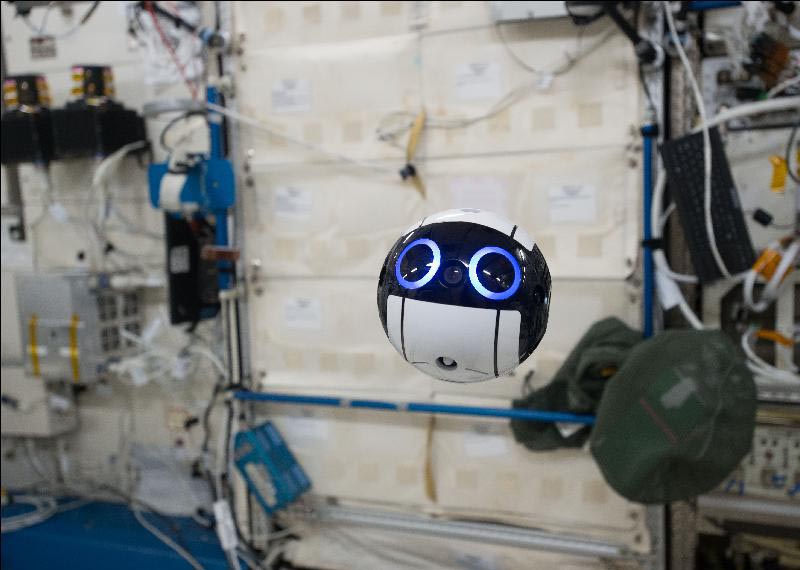
Ce mimimi volant a été livré à l'ISS à l'été 2017, mais n'a commencé à être sérieusement utilisé qu'un an plus tard, lorsqu'un astronaute japonais était à la station. Cependant, officiellement et maintenant, le statut de la balle est toujours un réajustement.
Pour le déplacer, il dispose de 12 minuscules évents. Mais pour la rotation - il y a déjà un bloc de gyrodynes.
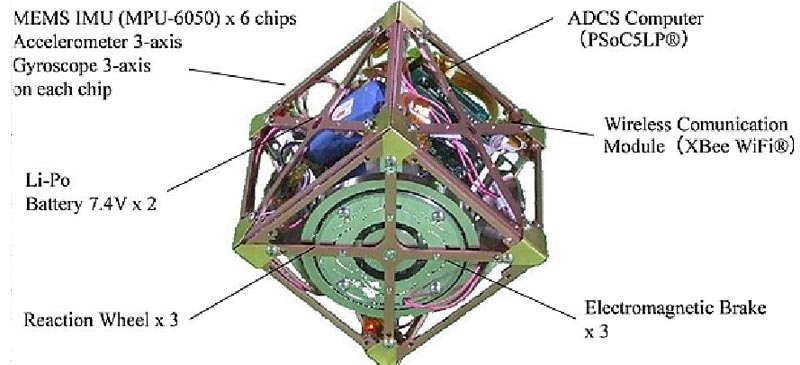
Il existe une connexion sans fil directe, sans béquilles (comme les Sphères) avec les ordinateurs portables de la station.
Vous pourriez penser qu'il y a des caméras vidéo dans les yeux, mais non.
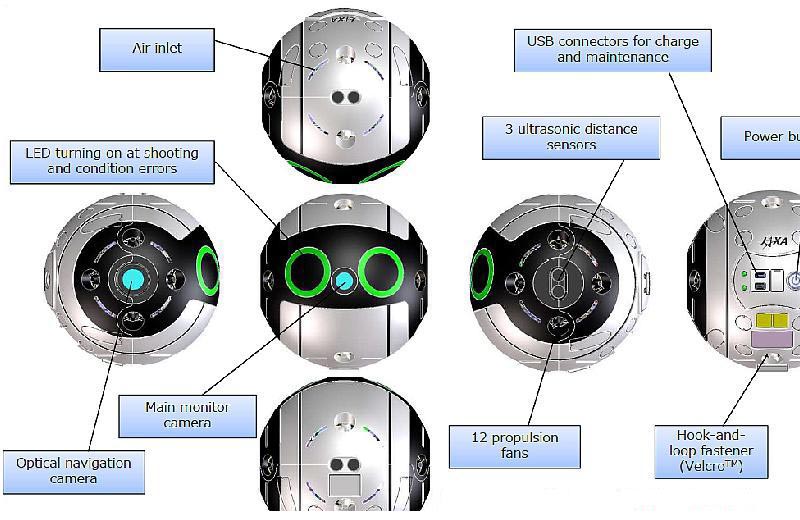
Caméscope domestique dans le nez. Les yeux ne sont que des indicateurs. Ils sont en fait gris. Quand ils brillent en bleu - c'est un signal que la caméra principale fonctionne. En cas de défaillance du système, ils deviennent rouges et la vue du ballon devient agressivement inattendue.

Le vélo marche déjà, que pour la première fois, le Ballon fait peur à l'astronaute américain qui ne s'attendait pas à une telle chose.
Du côté tribord, il y a une caméra auxiliaire, la navigation. Pour elle, deux marqueurs ont été placés dans le laboratoire japonais (cette tache rose vyrviglazno-rose). Habituellement, ils se trouvent à différentes extrémités du module, l'un sous le seuil, l'autre sur le couvercle de la mini-passerelle, mais peuvent être déplacés librement.
Sur le côté gauche de la balle se trouvent des capteurs de distance à ultrasons.
En ce qui concerne les problèmes à la mode, il est souligné que les parties du corps ont été imprimées sur une imprimante. (Et puis ils ont été polis et polis pendant longtemps, les miracles ne se produisent pas.)
En mode hors ligne, la balle n'a pas encore fonctionné. Son mouvement est contrôlé par deux opérateurs dans le MCC japonais.
Une fois par mois, l'
agenda vidéo est mis à jour.
1.3. Simon (Europe, plus précisément Allemagne)CIMON (Crew Interactive Mobile compagnon), en l'honneur du
Prof. Simon Wright . Sous les auspices de l'ESA, réalisée par le Centre allemand de l'aviation et de l'espace dans les installations allemandes d'Airbus, avec la participation d'IBM.
Poids: 5 kg.
Taille: 32 cm.

Livré à l'ISS "Dragon" cet été.
Une description détaillée n'a pas encore été soumise, il n'y a que les données les plus générales: 14 vis. Sur le nez, il y a un moniteur et une caméra vidéo, sur les côtés il y a deux autres auxiliaires.

Système Linux. IBM a créé une version portable de
Watson , qui ne nécessite pas de dizaines de serveurs ou de connexion au sol.
Si soudain vous décidiez que les drones sont quelque chose "avec l'IA d'IBM!" ils peuvent manœuvrer normalement, et maintenant ça a l'
air au moins un peu
cool - voici
ses photos sur des toboggans . Lors du premier test, il s'est avéré que sa capacité de manœuvre calculée est plus faible que les restes de non-inertie du laboratoire de vol européen (fièrement appelé ZERO-G).
Il était prévu qu'en octobre, l'Allemand Alexander Gerst commence à travailler avec lui, la reconnaissance vocale et faciale a été emprisonnée pour lui. Et en hiver, Simon sera ramené au sol. Mais, apparemment en raison de l'
infection de la station par des gremlins maléfiques , les délais ont changé. Vous pouvez en savoir plus sur le début sur
Twitter de Gerst .
2. AnalyseEh bien, pourquoi des drones sur l'ISS?
Il y a des déclarations cérémonielles par les créateurs, il y a des communiqués de presse d'agences, mais il est clair que pour la plupart, ce sont tous des discours bureaucratiques inutiles, où les perspectives sont gonflées comme une grenouille à travers une pipe, et des questions inconfortables sont remarquées sous le tapis.
2.1. À quoi servent les sphères?Tout d'abord, essayons de comprendre: le design est-il raisonnable?
Il y a de l'air à l'intérieur de l'ISS. Mais les moteurs des sphères utilisent un principe purement réactif. Cela signifie que lorsque le drone est en marche, il y a une ressource qui est constamment gaspillée. La question logique est: comment cette ressource est-elle reconstituée? Peut-être que vous pouvez ravitailler le drone directement à l'ISS (c'est-à-dire, d'un point de vue pratique, aucune ressource n'est gaspillée)? Peut-être qu'un compresseur a été livré à l'ISS avec le drone? Non. Le drone utilise des cylindres interchangeables avec du dioxyde de carbone liquéfié. Après avoir été utilisés dans un drone, ils doivent être abaissés au sol, y faire le plein et remonter à l'ISS.
De plus, même l'alimentation électrique du drone n'est pas sur la batterie, ce qui semble évident, mais sur les batteries. Piles AA jetables, deux packs de 8 chacun. Changer à chaque fois avant utilisation, environ devrait suffire pendant 2 heures. Après quoi, ils ne peuvent être envoyés au sol, et le drone a besoin de nouveaux.
Comment justifier une décision aussi étrange?
Peut-être que l'idée était que bien que le drone fonctionne à l'intérieur de l'ISS, il simule le mouvement à l'extérieur, dans le vide? Où il n'y a pas d'air? Ou peut-être même prévu en cas de dépressurisation de l'ISS? Ensuite, il pouvait se déplacer à l'intérieur de la station dans le vide, tout comme un drone avec des vis ne pouvait pas. Cela pourrait être utile. Le moyen habituel de trouver une fuite est le son, mais cette méthode ne fonctionne que si la fuite est minuscule et que l'air s'échappe lentement.
Mais les créateurs eux-mêmes disent que le drone n'est pas destiné à être utilisé dans le vide.
Ensuite, peut-être, nous trouverons la raison dans les expériences dans lesquelles ces drones ont été utilisés?
Expérience en anneau
Deux sphères, pour chacune s'ajoute un kit carrosserie avec inductances (Ring). Sous cette forme, les drones peuvent interagir magnétiquement - se repousser, s'attirer et se tordre mutuellement. Chargez-vous les uns les autres sans contact.
Quelle est l'idée. La raison de l'achèvement de la plupart des missions spatiales (réussies!) Est que le carburant est épuisé. L'appareil a élaboré son programme de base, et il fonctionne toujours parfaitement, pourrait servir et servir encore - c'est juste qu'il n'y a plus de carburant dans les moteurs. Il est impossible de corriger davantage la trajectoire de vol. Pire encore, il est impossible de décharger des gyrodines, et l'appareil ne peut plus maintenir l'orientation de l'antenne au sol et des panneaux au soleil - la connexion au sol, la puissance est perdue ... Est-il possible de se passer de la consommation régulière du propulseur? Si vous placez plusieurs de ces «anneaux» (par exemple, à la surface de l'ISS), vous pouvez conduire un petit satellite entre eux autant que vous le souhaitez sans dépenser de carburant - assez de puissance, ce qui n'est généralement pas un problème.
Au niveau des mots communs, tout cela est drôle. Mais il est difficile d'imaginer un cas d'utilisation réel - où et dans quel but pratique cela peut-il être nécessaire?
De plus, l'expérience elle-même, sous la forme dans laquelle elle a été menée, est complètement inutile, donc des choses élémentaires y ont été faites.
Qu'est-ce que ça donne? C'était pour quoi?
Expérience de vertigeDepuis 2008, les propositions et tentatives de mise à niveau des Sphères commencent pour que leur navigation ne soit pas basée sur des balises, mais sur l'analyse vidéo. En 2010, le projet prend le même DARPA pour le financement, y compris ces points pour le drone. Il semble que l'idée évidente et utile soit de travailler dans une version tridimensionnelle avec le fait que les prototypes de pilotes automatiques d'automobiles sont maintenant fabriqués dans une version bidimensionnelle. De plus, entrepris avant que ce sujet ne devienne un boom.
Mais c'est d'une part. En revanche, la mise en œuvre du drone sous forme de Sphère convient le moins à cela.
Même si vous fermez les yeux sur le fait que les sphères sont terriblement lentes, qu'en est-il du fait que le début du vol nécessite une perte de temps humain (vérifiez la pression dans le cylindre et remplacez si nécessaire; remplacez les batteries par des neuves), et les heures de vol sont très limitées (fréquentes changement de cylindres et de batteries, et avec livraison depuis le sol)?
Halo "Expérience"
Entre guillemets, car le projet est qu'un pare-chocs est monté sur le drone, sur lequel vous pouvez accrocher autre chose.
Cela aurait probablement eu un certain sens - si le drone pouvait être utilisé comme inspecteur de drone ordinaire au moins à l'intérieur de la station. Mais les sphères ne peuvent pas être utilisées comme ça, pas le TTX. Alors pourquoi est-ce tout?
Mais pour quoi. Par exemple, des «unités d'amarrage» étaient accrochées aux kits de carrosserie et les drones amarrés les uns aux autres. N'est-ce pas un miracle?
Ou voici un autre: deux drones attachés avec une corde, et regardé comment l'un peut tirer l'autre. Et il s'avère qu'il s'agit d'une imitation de la capture de débris spatiaux. Incroyable! N'est-ce pas?
Expérience Splash (Slosh)
À la poutre spéciale sont attachées: aux extrémités il y a deux sphères, et au milieu il y a un ballon transparent partiellement rempli de liquide.
Les sphères sont utilisées pour tordre, secouer, osciller, etc. La caméra à côté du cylindre décolle ce qui se passe à l'intérieur. Différents degrés de remplissage ont été utilisés et des liquides aux propriétés différentes.
Il est clair que, tout d'abord, il s'agit d'une analogie de ce qui peut arriver dans les réservoirs à carburant lorsqu'ils se retrouvent dans un état proche de la gravité zéro. L'expérience se déroule donc avec la participation de véritables grands fabricants.
En général, cette expérience semble la plus convaincante de toutes les autres. Qu'est-ce qui nous fait quand même utiliser les réservations? Un design avec un rocker et des sphères comme accélérateurs est une chose extrêmement maladroite. Le travail des propulseurs des Sphères, notamment au fil du temps, est loin d'être précis. L'utilisation de Sphères dans le cadre de l'installation impose des restrictions strictes sur la durée de l'expérience, il est impossible de les mener longtemps et en mode automatisé (sessions avec Sphères - quelques heures en quelques semaines). Il semble que s'il y avait un réel intérêt pour de telles expériences, une place dans les racks serait allouée, et un petit appareil-shaker y serait installé, affûté pour de telles expériences. Et s'il n'y avait pas de place dans les racks, alors même: n'était-il pas plus raisonnable de faire un cadre avec des gyrodines autour du cylindre que d'attacher de longues extrémités auxquelles les sphères sont accrochées, plutôt volumineuses, mais faibles et inexactes en termes d'accélérations en cours de création?
En d'autres termes, des doutes subsistent quant à la nécessité de sphères pour une telle expérience. Et ils sont soutenus par le fait que tous les modèles de drones suivants n'ont pas été essayés pour quelque chose comme ça.
Alors, pourquoi les sphères étaient-elles nécessaires?Laissez les élèves expérimenter - leur expérience et leur intérêt à entrer dans la sphère spatiale sont-ils plus importants que les avantages réels de sphères spécifiques sur l'ISS?
Ou, plongeant dans la théologie du complot collante, bien au contraire: la DARPA a financé ce projet pour confondre les vaillants militaires russes et chinois? Genre, regardez, quels inspecteurs de satellites prototypes sont impuissants à venir avec nous ... Si nous avions des inspecteurs de satellites sympas, financerions-nous un tel câlin? Nous n'avons pas d'inspecteurs satellites!
Ou est-ce que les bureaucrates supplémentaires de la NASA et de la DARPA, qui ne sont d'aucune utilité réelle, sont obligés de créer l'apparence du travail afin de justifier leur existence? S'agit-il uniquement de «maîtrise» des fonds? Et en même temps, le remplissage formel de l'horaire de travail des astronautes n'est «pas en vain on les emmène aller et retour»?
2.1. Pourquoi avons-nous besoin d'une balle?Ici, l'objectif est énoncé immédiatement, très clairement et de manière très convaincante.
Voyons comment sont organisées les expériences avec des personnes sur l'ISS.
Un homme, toujours sur terre, enseigne un plan de travail, s'entraîne. Mais! Étant donné que les gens sont abandonnés sur l'ISS depuis six mois, et qu'ils sont peu nombreux, il est impossible de préparer l'astronaute idéalement pour chacune de ses expériences, et de le faire avec la compétence d'un assistant de laboratoire qui travaille avec un tel équipement depuis des années. Mais une expérience s'impose plus ou moins vite, pas ennuyeuse, il y a un planning. Par conséquent, presque toutes les expériences sont sous la supervision du MCC. L'astronaute monte une caméra sur le support, visant l'endroit où il travaillera. Et le MCC peut non seulement répondre à ses questions - mais aussi immédiatement corriger s'il fait déjà quelque chose de mal, sans le remarquer lui-même.
Bien sûr, une caméra fixe sur le support n'est pas une option idéale. Parfois, vous voulez montrer une image en gros plan - ce qui est sous ses doigts. Parfois, c'est vraiment important. L'expérience peut être reportée ou annulée, mais dans le cas de la prévention ou de la réparation de systèmes de survie, il n'y a nulle part où aller et une erreur peut entraîner de grandes difficultés. Par conséquent, vous devez appeler quelqu'un de l'équipage pour obtenir de l'aide: l'un travaille, l'autre tient la caméra et décolle par-dessus son épaule.
Les Japonais affirment que s'embêter avec des caméras prend jusqu'à 10% du temps.
Ici, bien sûr, il n'est pas tout à fait clair si cette déclaration n'est pas astucieuse - ils ont considéré le temps des astronautes à l'intérieur du travailleur, ou inclus tout ce qu'ils pouvaient: les astronautes pendant leur temps libre aiment photographier dans des hublots; il est considéré comme une bonne forme pour tout le monde d'enregistrer leur visite vidéo de la station, au moins une fois par expédition; vous devez maintenir des vlogs et participer à des ponts vidéo, car cela est requis pour la vulgarisation / pour des raisons politiques et d'image. Donc en réalité, le pourcentage de temps peut être différent.
Mais cela ne change pas l'essence: pourquoi ne pas libérer cette fois-ci quelque chose de vraiment utile?
La balle est déclarée comme une caméra mobile universelle, ce qui devrait permettre de gagner du temps.
Le drone fonctionne-t-il ainsi en réalité?Une image assez médiocre vient de la balle (si on la compare avec des caméras à part entière avec de bons objectifs montés sur l'ISS aux supports). Et quelle autre image peut provenir d'un appareil photo compact avec un objectif minuscule?
La mobilité est encore pire. Les limites de la jouabilité de Sharik sont évidemment liées à la réassurance, la puissance des vis est spécialement sous-estimée. Cela peut être changé à l'avenir si la partie logicielle (navigation et manœuvre des images) est fiable et efficace. Mais c'est juste le gros problème. Si nous prenons des technologies «terrestres» similaires comme point de départ - ce qui se fait dans le domaine des pilotes automatiques automobiles - il semble que ces spécialistes et développements n'ont pas été impliqués, et dans JAXA tout est fait à partir de zéro, presque par des débutants dans ce domaine.
Cependant, le plus gros problème n'est même pas cela.
Supposons que le ballon soit capable de reconnaître l'environnement en toute confiance et de manœuvrer avec précision dans celui-ci. Est-ce suffisant pour que le drone devienne assistant opérateur - comme, disons, un autre membre d'équipage avec une caméra?Les propriétaires de drones connaissent bien la réponse. Le pilote automatique fonctionne bien quand on lui confie une tâche claire: les points de contrôle de trajectoire sont entrés ou l'objet de tête est défini. Dans le cas d'une voiture, un tel cas d'utilisation est assez pratique. Dans le cas des drones, plus est nécessaire - interaction avec l'opérateur au fur et à mesure que la tâche de vol est affinée, y compris les conditions d'atterrissage qui ne sont pas spécifiées à l'avance (rappelez-vous tous les drôles, à travers les larmes, les histoires de drones qui n'ont pas été données au propriétaire).Pour un drone assistant sur l'ISS (un assistant en réalité, pas un communiqué de presse), cela nécessitera principalement une interaction avec une personne. Pratiqueinteraction. Pas superficiellement, au niveau de commandes verbales claires ou de gestes formellement prescrits comme un contrôleur de la circulation. Et comme cela se produit dans le cas de deux personnes réelles faisant quelque chose ensemble. Vous prédisez les actions et les intentions des autres au début du geste, selon l'endroit où le regard est dirigé, comme un ordre encourageant, il peut y avoir juste un coup d'œil rapide et d'autres réactions comportementales mimétiques, évidentes dans la situation réelle, et extrêmement difficiles à formaliser.Mais pour que cela devienne une réalité, le drone doit être équipé d'une IA très intelligente - capable non seulement de manœuvrer, mais de comprendre ce qui se passe. Sinon, son utilisation ne sera pas utile, mais une autre tâche difficile que l'astronaute sera obligé de garder à l'esprit en parallèle avec le travail principal. Il n'y aura que surcharge, irritation, erreurs.Le développement d'une telle interaction est maintenant à ses balbutiements, principalement parce que dans cet état, le développement d'une IA forte. Sans créer une IA forte, cette tâche peut avoir, au mieux, une solution ersatz similaire aux traducteurs automatiques actuels - une interlinéaire avec des erreurs qui doit être corrigée par une IA forte sous la forme d'une personne. Sans une IA puissante, le drone assistant devra être constamment surveillé d'une manière ou d'une autre - et intervenir régulièrement dans ses actions! - opérateurs sur le terrain.2.3. Et voici Simon!Apparemment, les développeurs de Simon le comprennent. Ils comprennent également que d'un point de vue économique, le schéma utilisé par les Japonais avec Sharik - au moins deux spécialistes permanents sur terre pour gagner 10% du temps d'un cosmonaute - est au mieux un coup bash.Par conséquent, d'autres objectifs sont énoncés.Simon suivra simplement discrètement le propriétaire, sera son assistant vocal, et collectera des données pour une analyse psychologique de l'état de l'équipage.C'est ça. Il est proposé de reprendre la technologie déjà mise en œuvre dans les drones terrestres. Donnez ensuite à l'astronaute en orbite un assistant vocal artificiel (lu, muet) - lorsque l'astronaute dans son casque a déjà des assistants en direct au MCC. Et comme une cerise, faites une version passive de ce qui se fait sur terre sous une forme active, en utilisant des méthodes beaucoup plus sophistiquées dans des projets comme "Mars 500". Si ce n'est pas un grand pas pour toute l'humanité, alors qu'est-ce que c'est?Malgré tout cela, Simon peut toujours être un réel avantage. Tout simplement sans rapport avec tout ce qui précède, pas évident pour les compilateurs de communiqués de presse.2.4. Toilettage de l'espaceSi vous regardez attentivement les vidéos de l'ISS, en faisant attention au comportement des astronautes, vous remarquerez une chose amusante - pas du tout évidente à l'avance, même si vous connaissez bien la physique et comprenez ce qu'est l'apesanteur.Un fait empirique: il est plus facile pour une personne en apesanteur de traiter de grandes choses massives que de petites et légères.Les difficultés commencent lorsque vous lâchez une petite chose.Il semblerait, quel est le problème?
Eh bien, il suffit de «mettre» une chose en l'air et elle y restera. Zéro gravité! N'est-ce pas plus pratique que sur terre, où une chose peut tomber, et avant de lâcher quelque chose, vous devez trouver un support fiable sur lequel la mettre?Le problème est qu'une personne ne peut pas «mettre» une chose en l'air avec une précision suffisante. Sur terre, nous sommes habitués à mettre des choses sur des surfaces différentes, mais toujours avec gravité. Il lâche prise - et la force de gravité pousse à la surface, et la force de friction ne permet pas de se déplacer latéralement. Il y a une illusion qu'une personne elle-même peut ainsi laisser les choses au repos si précisément parce qu'elle contrôle idéalement ses mouvements et applique une force.En gravité zéro, cette illusion est rapidement dissipée. Il s'avère que si une personne veut «mettre» une chose en l'air, comme elle l'a posée sur la table, cela ne fonctionne plus.Même si une personne essaie très fort de laisser le sujet immobile dans les airs, en lâchant prise et en retirant très soigneusement sa main, le sujet bougera toujours avec une petite vitesse résiduelle. Et si une personne lâche une petite chose comme marcher, sans trop d'attention ... À première vue, la vitesse d'une chose n'est pas si importante. Mais c'est constant, et ça n'ira nulle part. Et en quelques secondes, il s'avère que l'objet dépasse les limites dans lesquelles l'astronaute peut atteindre, simplement en étirant sa main. Et une solution est nécessaire. Soit lâchez la chose, mais ensuite vous devez voler derrière elle avec tout votre corps, et pas seulement bouger votre main, ou vous devez saisir la chose tout de suite et la rapporter. (Par exemple, préparer une tablette - l'attention n'est pas sur le visage du locuteur, mais sur ses mains.)Il vaut mieux s’accrocher et ne plus lâcher prise. Mais si vous souhaitez interagir avec plusieurs objets en même temps?Vous ne pouvez pas laisser l'un des objets suspendus pendant plus de quelques secondes. Vous devez constamment revenir sur ce sujet et le «déplacer», en flottant, en arrière.Et si l'article est une tablette, sur l'écran dont vous regardez quelque chose, et que son appareil photo doit vous tirer dessus, le problème est aggravé par le fait qu'en plus des vitesses résiduelles, il existe également une vitesse de rotation résiduelle. Le comprimé va non seulement flotter lentement, mais aussi se détourner lentement de vous.Tout cela conduit au fait que les astronautes tiennent dans leurs mains ce avec quoi ils travaillent ou sont engagés dans le toilettage spatial - ils corrigent constamment les objets laissés suspendus dans l'air.De nombreux fans d'astronautique, même après avoir regardé une bonne partie des publicités de l'ISS, ne le remarquent pas: presque tous les articles de la station sont avec des autocollants collants. Et les morceaux de mère Velcro ici et là sur les «tables», les «établis», les murs de la gare, certains modules en sont entièrement recouverts. En plus du velcro, il y a des poches de maille en caoutchouc à la station ici et là. Et quelque chose s'accroche aux mousquetons. Pour les ordinateurs portables et les supports de caméras. Tout cela dans le même but - résoudre en quelque sorte le problème du nettoyage de l'espace.Et en ce sens, Simon a une fonction utile unique: il peut être utilisé comme un écran qui peut être "mis" en l'air. Ensuite, Simon lui-même détiendra à la fois la position et la direction de l'écran (et de la caméra) de l'astronaute. Il n'a pas besoin d'être soigné.La question est, cela valait-il la peine d'envoyer un objet lourd et volumineux pour cela - et pas un petit drone compact auquel vous pourriez simplement attacher une tablette?2.5 Le problème principal des drones sur lesdrones ISS n'est tout simplement pas nécessaire sur l'ISS - il n'y a aucun problème pour eux.Plus précisément, des tâches pourraient leur être trouvées, mais pour résoudre ces problèmes, les drones ne devraient pas être un jouet du type "nous remplissons tout à la mode, mais c'est bon pour quelque chose", mais emprisonnés pour une fonction spécifique.3. De beaux drones du futurParmi les vraies tâches pour lesquelles les drones pourraient en principe être utiles sur l'ISS, il y en a maintenant deux:1. Tirez sur le travail des astronautes,2. Sauvez les gens du toilettage spatial.Si vous cherchez une solutionspécifiquement pour ces tâches en ce moment - vous devez utiliser quelque chose qui peut fonctionner dès maintenant , et travailler efficacement, en résolvant complètement les objectifs énoncés. Et ne faites pas quelque chose de flou, justifié par le fait que «nous développons des approches technologiques afin qu'un jour à l'avenir ...»3.1. Offres rationnellesAujourd'hui et dans un futur proche, les drones sur l'ISS ne devraient pas :- s'appuyer sérieusement sur les débuts de l'IA (car ce sont trop des débuts);- utiliser la reconnaissance vidéo pour la navigation (non débogué jusqu'au bout et redondant dans un environnement fermé où tout est contrôlé);- alourdir la conception avec des analogues inutiles d'appareils spécialisés déjà disponibles sur l'ISS de la meilleure qualité (pas de caméras intégrées, pas de tablettes intégrées, pas de processeurs au-delà des contrôleurs d'appareils minimum).Le drone ne devrait être que l'outil de travail réel - une unité gyrodyn, des ventilateurs, une batterie, une connexion sans fil, et c'est tout. (Le maximum est encore quelques-unes des plus petites caméras de type smartphone, et uniquement pour que leur flux vidéo soit transféré à travers l'image vers l'unité de traitement dans le rack, le traitement n'est là.) De plus, tous les détails sont aussi minuscules que possible. Si les drones précédents avaient les dimensions d'une épée de basket-ball, de handball et d'une petite plage, le drone ISS idéal devrait être beaucoup plus petit, s'efforcer de la taille d'une balle de tennis.Soit:Les capacités du processeur sont transférées sur l'un des racks scientifiques afin que le drone ne supporte pas cette énorme charge supplémentaire (n'oubliez pas qu'en plus du module de calcul lui-même, le drone est également obligé d'alimenter ce module!).Pour la navigation, utilisez le schéma Sphère d'origine, mais sous une forme inversée : le drone lui-même émet des signaux comme deux balises (à tribord et bâbord), ces signaux sont lus par des détecteurs fixés dans les coins des modules de la station et triangulés par retard; ainsi que les données internes du drone - capteurs d'accélération, le fonctionnement des moteurs électriques et des anneaux gyrodynamiques - cela suffit pour déterminer à la fois la position du drone et son orientation, et leurs dérivés.Pour tracer l'itinéraire, un modèle d'environnement prêt à l'emploi est utilisé (l'ISS est un grand objet, mais bien visible), marqué avec des stylos et mis à jour si nécessaire par l'opérateur, sans jouer dans la reconnaissance des formes à partir d'un signal vidéo. Pour contrôler l'environnement, une image est utilisée avec la caméra connectée (pas sur le drone) dans le module où se trouve maintenant le drone - et ce contrôle est effectué par l'opérateur. Si des algorithmes neuronaux sont utilisés, c'est uniquement pour résoudre des tâches auxiliaires de bas niveau pour lesquelles ils sont déjà suffisamment bons.Le drone lui-même traite les informations au minimum. Il ne décharge que ses données internes sur l'ordinateur dans le rack et reçoit de lui des instructions spécifiques pour le fonctionnement de l'équipement.Il y a des points de montage sur le drone. Hétérogène. Ce sont des verrous électriques (la partie complémentaire du verrou est attachée à l'objet que le drone devrait utiliser), et juste un morceau de maman-Velcro qui est standard pour la station (en gravité zéro, cela suffit pour connecter le drone même avec un objet assez massif). Dans tous les cas, ce devrait être une monture minimale, beaucoup plus petite que les énormes pare-chocs redondants des sphères.Lorsqu'une vidéo d'un astronaute en activité est requise, une caméra vidéo est fixée au drone - une grande caméra / caméra à plein temps, qui se trouve sur l'ISS. Le drone le remorque lentement et le tourne lorsque le MCC doit changer l'angle d'observation du lieu de travail du cosmonaute. La manœuvre nécessaire est calculée au sol / sur l'ordinateur monté en rack, le drone lui-même ne reçoit que des commandes élémentaires pour les moteurs.De sorte que pour l'astronaute, ce serait vraiment un soulagement, et non un mal de tête inutile, dans le rack scientifique où l'espace est alloué pour l'unité de traitement du drone, l'espace pour son quai devrait également être alloué - afin que le stationnement et la recharge, comme cela a longtemps été fait dans les aspirateurs. Et il vaut mieux que le drone ne soit pas seul, mais avec la capacité de travailler avec un carrousel: du point de vue de l'astronaute, le drone semble toujours chargé, seulement occasionnellement une copie apparaît à côté du drone de travail, entre eux il y a un transfert (automatique) de l'objet remorqué, après quoi le drone usé est retiré pour être rechargé .En plus de travailler comme vidéaste, une conception similaire permettra d'utiliser le drone pour lutter contre le toilettage.Comme un appareil photo, un drone peut maintenir la position et l'orientation d'un smartphone / tablette qui lui est attaché; remorquer cet écran derrière l'hôte; compenser le recul lorsque l'astronaute tape sur l'écran de la tablette sans le tenir avec un autre ami. Ou, pendant les travaux de réparation, «gardez» un sac de travail / une petite «table» en l'air, avec du velcro et des aimants pour les petits objets et les attaches, à côté de l'astronaute comme il l'entend - éliminant ainsi la nécessité de redresser le sac emmêlé à chaque fois, ou de retirer la chose nécessaire avec un mousqueton sur la ceinture, puis attachez-le, etc.Autrement dit, ce devrait être juste une retenue universelle en l'air pour d'autres choses. Pas un support pour certains «instruments scientifiques» abstraits, mais pour ces objets qui sont vraiment et constamment utilisés à la station dans la vie quotidienne.Et avec le développement de cette approche:il vaut mieux imaginer même pas deux drones travaillant en équipe avec une chose près de l'un des astronautes, mais tout un essaim d'entre eux à la station fonctionnant comme un carrousel. Plusieurs instances sont constamment localisées dans chaque module de la station, prêtes à agir sans procédures d'initialisation spéciales. En arrière-plan, ils commencent à pousser, afin qu'ils gèlent et ne tournent pas, les objets à côté de l'astronaute, si ces objets sont libérés des mains, mais ne sont pas collés au mur avec du Velcro / ne sont pas autrement fixés, et l'attention de la personne est clairement répartie entre plusieurs de ces objets.3.2. Quelle est la prochaine étape - en réalité?L'ordre dans lequel les drones sont apparus sur l'ISS en miniature reflète le niveau de développement technologique des pays. Le leader fait quelque chose, puis les autres qui sont capables de concourir sont attirés: d'abord les États-Unis, puis, par une large marge, le Japon, l'Allemagne ...Il est clair que la Russie ne devrait pas être attendue même dans cette course miniature.Ensuite, il s'avère que maintenant c'est à nouveau le tour des États-Unis? Compte tenu de leur expérience, au regard des efforts des partenaires, la NASA devrait-elle désormais porter cette course à une nouvelle étape technologique?Apparemment, quelque chose est vraiment prévu là-bas lentement. Au moins, la NASA mène une sorte de remue-méninges, annonçant des compétitions publiques à divers hackathons.Malheureusement, les solutions proposées lors de ces concours sont corrompues par des stéréotypes erronés sur les conditions, les problèmes et les tâches de l'ISS. Les concepts sont élaborés avec diligence, mais sans réfléchir, sur le principe de «aveuglons tout ce que nous pouvons dans un drone et soudain, il sera utile pour quelque chose?», Voici un exemple typique .