Salutations encore!
Étant donné que mon petit essai précédent a été généralement accepté positivement, je veux partager certaines des connaissances sur les vélos électriques accumulées lors des forums de lecture.

Dans cet article, je veux partager les types de lecteurs utilisés dans le vélo électrique, leurs avantages, leurs inconvénients et leurs fonctionnalités.
J'espère que cela semble intéressant pour quelqu'un. Je ne passerai en revue que les moteurs à courant continu triphasés - parce que je n'ai pas examiné le reste, et ces autres sont relativement rares
de nos jours.
Commençons donc:
Dans l'ensemble, les éléments moteurs des vélos électriques peuvent être classés en 3 types:
- Moteur électrique de chariot, moteur électrique situé au centre.
- Roue de motoréducteur (motoréducteur à moyeu).
- Roue moteur à entraînement direct (entraînement direct).
Commençons par le
numéro un: central, central .
À propos, il est très populaire dans toutes sortes de vélos électriques européens de marque.
Il est situé près du chariot (pédales) du vélo, grâce à un entraînement par chaîne et un mécanisme d'engrenage,
s'il y en a un sur un vélo, il fait tourner la roue arrière.


Avantages: si un vélo à engrenages - une large gamme d'utilisation optimale grâce à ces engrenages - vous pouvez obtenir une bonne traction à basse vitesse et à haute vitesse.
Inconvénients: la chaîne et les étoiles deviennent des consommables, si vous cassez la chaîne en cours de route, ou pliez le coq, ou en quelque sorte brisez l'entraînement de la chaîne, vous rentrerez chez vous à pied en poussant votre transport.
Également impossible la transmission intégrale avec un seul moteur.
Numéro deux: boîte de vitesses, adaptéeLe moteur électrique est situé à l'intérieur du moyeu de roue, il existe également un engrenage planétaire de réduction de vitesse, qui permet au moteur électrique de tourner à des vitesses plus élevées que la jante de roue.
Les engrenages sont généralement en plastique.
Il y a un mécanisme qui transmet le moment dans le système roue-moteur dans une seule direction - avec traction depuis le moteur (roue libre, roue libre).
Dans le cas où la transmission va en sens inverse, le système est déconnecté, donc lors du roulage ou du mouvement des pédales, le moteur électrique ne tourne pas, et donc ne complique pas la rotation de la roue.
Ici à gauche - entraînement direct, à droite - boîte de vitesses:

motoréducteur:


Avantages: meilleure efficacité dans une large gamme de vitesses par rapport à la transmission directe, meilleure traction à faible vitesse et démarrage, moins de consommation d'énergie par kilomètre, taille et poids plus petits, manque de résistance au mouvement lors de la conduite à partir de pédales.
Inconvénients: le manque de capacité à utiliser la récupération, un point faible sous la forme d'engrenages en plastique, lors de la coupe de dents ou des dommages à l'embrayage à roue libre en cours de route, vous devez pédaler.
Numéro trois: Direct DriveLe système le plus fiable, en minimisant les pièces inutiles, est un moteur électrique propre, le rotor est assis sur l'axe et est fixe par rapport à la fourche, le stator tourne avec la roue.




Avantages: un minimum de pièces inutiles, la récupération est possible, la réalisation facile de vitesses élevées.
Inconvénients: diamètre et poids relativement importants, faible efficacité à basse vitesse.
Maintenant, sur les problèmes généraux liés, principalement avec les roues motrices, parce que middrive ne m'intéresse pas, donc je n'étais pas très intéressé par cela.
Ainsi, en général, une roue de motoréducteur est plus couple élevé et plus économique.
L'entraînement direct est plus rapide, donc si vous voulez rouler à des vitesses de 40 à 50+, alors vous devriez plutôt regarder les entraînements directs.
L'entraînement direct peut également utiliser le contrôleur pour mettre en œuvre un mode de récupération - en transférant le moteur électrique en mode générateur avec stockage de l'énergie générée dans la batterie.
L'effet de la recharge de la batterie avec récupération est plutôt faible - une augmentation de l'ordre de grandeur de 2 à 3% du kilométrage, plus il y a aussi des nuances sous la forme de courants de charge élevés, et le fait que charger une batterie au lithium à des températures inférieures à +5 degrés Celsius est de la tuer (s'applique aux téléphones mobiles et d'autres appareils ménagers sur un lithium-ion et lithium-polymère, soit dit en passant), mais il peut être utilisé comme frein, et ainsi économiser des plaquettes de frein.
Soit dit en passant, dans le «grand transport électrique», sous la forme, par exemple, de trains électriques ER2T, le freinage régénératif est exactement utilisé - jusqu'à une vitesse d'environ 25 km / h, le train ralentit en introduisant simplement des moteurs électriques de traction en mode générateur, en retransférant l'électricité générée au réseau de contact.
Pour une conduite économique, il est beaucoup plus utile d'utiliser le freinage minimum et le maximum - à la côte - c'est-à-dire, voir le signal rouge du feu de circulation, par exemple, ne pas y aller directement sur le gaz, et fermer le gaz sur 300 mètres, et côte à vitesse pour arriver au feu de circulation pas plus de 10-15 km / h.
Quoi d'autre: la vitesse de conduite.
L'une des questions les plus courantes pour les débutants est à quelle vitesse mon vélo roulera-t-il sur un entraînement électrique?
Cela dépend de quatre choses:
1. Le régime de ralenti du moteur-roue à la tension nominale:
Une normale les a vendus soit indique, soit ils peuvent être éliminés.
Ma roue motrice, par exemple, a 310 tr / min à 48 V. Lorsque mesuré avec un tachymètre chinois,
Il s'est avéré 305 révolutions par minute lorsqu'il est alimenté par 4 batteries au plomb connectées en série de 12 volts (environ 50 volts en fait) sur une roue suspendue - acceptable.
N'oubliez pas que c'est la vitesse de la roue du moteur à vide, c'est important!
2. Le diamètre de la jante. Il est clair que plus la circonférence de la roue est grande, plus la vitesse réelle à vitesse égale est élevée.
Formule de calcul: circonférence de roue en millimètres / 1000 * (tours de roue-moteur / 60) = vitesse en mètres par seconde. Pour des kilomètres par heure, multipliez par 3,6, pour obtenir la vitesse finale prévue - tout cela toujours divisé par 1,2, car la vitesse sous, même avec une charge tout à fait réalisable, sera inférieure à sans charge (environ 20%, oui).
3. Correspondance du pouvoir à la résistance au mouvement.
Si vous avez une vitesse nominale de 50 mph, pour atteindre et maintenir une telle vitesse, le moteur devra développer une puissance de l'ordre de kilowatts, soit 1000 watts.
Si votre moteur développera une puissance de 500 watts, alors en raison de la résistance à la rotation, il ne pourra pas atteindre sa vitesse maximale, c'est clair, et vous vous contenterez d'une vitesse maximale de 37 mph au lieu de 50 - tandis que le moteur sera toujours assez chaud en raison d'une surcharge, si à cette vitesse, vous conduirez le manche des gaz jusqu'à la fin.
4. Tension d'alimentation.
Lors de l'achat d'une roue de moteur, la tension d'alimentation nominale lui est indiquée - par exemple, 48 volts.
Mais personne n'alimente directement de tels moteurs - ils sont contrôlés par un contrôleur qui reçoit une tension constante monophasée de la batterie, et la convertit en une "rotation" triphasée, pour alimenter la roue du moteur.
Il n'est donc pas nécessaire d'alimenter la roue du moteur avec le contrôleur et la batterie pour la tension spécifiée.
Vous pouvez alimenter un moteur de 48 volts avec une batterie et un contrôleur de 36 volts.
Soit 24 ou 60 volts - tandis que la vitesse de rotation du moteur-roue à plein régime sera de 0,75, 0,5 ou 1,25 de la valeur nominale, respectivement.
Autrement dit, vous pouvez bien contrôler la vitesse maximale dans certaines limites en modifiant purement la tension de la batterie et du contrôleur.
Il existe des contrôleurs à double tension - par exemple, 36/48 volts ou 48/60 volts.
En outre, un paramètre important des contrôleurs par rapport au moteur électrique est son ampérage, à travers lequel la puissance maximale atteinte par le moteur qu'il alimente peut être réglée - par exemple, 36v 17A = ~ 612 watts, 60V 25A = ~ 1500w
Le fait est que la «puissance en watts» indiquée sur la roue du moteur est plutôt celle recommandée à long terme, dans laquelle elle ne surchauffe pas, et dans laquelle sa longue et heureuse vie est garantie.
Et donc avec un moteur de 250 watts, vous pouvez appliquer à la fois 500 et 800 watts, et même des kilowatts - bien sûr, dans la perspective à long terme, les engrenages en plastique ou les roues libres peuvent ne pas l'aimer, mais on pense que la plupart des deux roues motrices à trois roues motrices multiplient relativement bien.
Cependant, les contrôleurs méritent un article séparé, donc nous n'entrerons pas dans cette jungle maintenant.
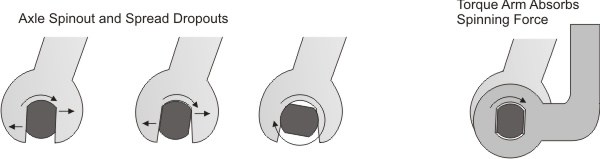
Ce qui est plus important - les amplificateurs de décrochages (bras de couple).
Étant donné que le cadre des vélos ordinaires n'est pas conçu pour tordre l'essieu des roues, en particulier dans le cas d'une fourche / cadre en aluminium, il est fortement recommandé de prendre des mesures contre la rotation de l'axe du moteur-roue.
Le fait est que selon quelque chose, toute action donne lieu à une opposition.
La roue motrice fait tourner la jante, reposant sur l'axe, c'est-à-dire que l'axe de la roue est comme un point d'appui, qu'elle essaie de tourner dans l'autre sens.
Si les rainures de la fourche ne peuvent pas supporter ce moment, elles se cassent, en conséquence - la roue part séparément, le vélo à la vitesse avec les plumes de la fourche s'enfonce dans l'asphalte. Ce que cela entraîne - j'espère qu'il n'y a pas besoin d'expliquer, les fractures osseuses et même la morgue en conséquence - sont très probables.


Bonne chance avec l'électrification, mes amis!
PS quelque chose que mes yeux ici sont méchants - pour la première fois lui-même, dans l'ensemble, a remarqué ...
mais en général je suis blanc et moelleux, si tu n'as pas à aller travailler tôt le matin ...: D
