
Le modèle mis à jour de la caméra RealSense 435, qui a reçu l'indice i, a vu la lumière. Sa particularité est le capteur inertiel intégré IMU (Inertial Measurement Unit). Le nom Intel RealSense ne vous dit-il rien? Alors ce post est fait pour vous. Le développement de cette technologie est décrit de manière si détaillée dans le blog de l'entreprise que vous pouvez raconter son histoire sans aller au-delà de l'Habra. C’est ce que nous ferons probablement, car récemment, RealSense ne dit pas ce qui est entendu - bien que ce soit injuste.
 Appareil photo créatif avec prise en charge du SDK Intel Perceptual Computing. 2013 année
Appareil photo créatif avec prise en charge du SDK Intel Perceptual Computing. 2013 annéeLes technologies d'imagerie 3D ont été développées chez Intel depuis le début des années 2000. Le nom RealSense
est apparu en 2014 , remplaçant le
Perceptual Computing précédemment utilisé; Puis
vint le SDK Intel RealSense et un prototype de caméra. Le principe de fonctionnement des caméras 3D consiste en la formation simultanée de deux types d'images: une trame RVB ordinaire et une carte de profondeur obtenue à l'aide d'émetteurs et de capteurs infrarouges. Une image enrichie de données de profondeur peut être utilisée à la fois pour manipuler et analyser des objets représentés (par exemple, segmenter l'arrière-plan ou déplacer le point AF), ainsi qu'une interface naturelle pour contrôler les systèmes informatiques humains à l'aide d'expressions faciales, de mouvements des mains et des doigts, de gestes.
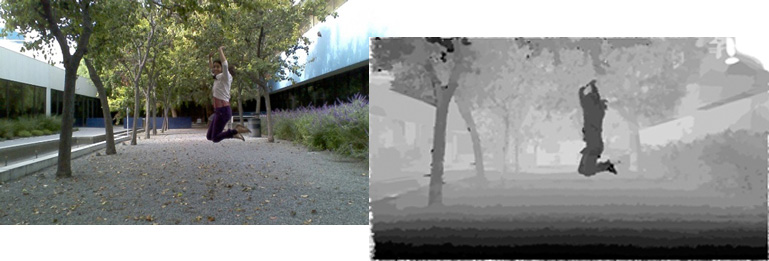 Photo RVB et carte de profondeur pour lui
Photo RVB et carte de profondeur pour luiAu cours des 2 prochaines années, Intel a activement promu RealSense sur tous les fronts. Des
concours de développeurs réguliers ont eu lieu, de nombreux
supports de formation et de référence ont été publiés. En 2015, deux caméras série RealSense ont été lancées: la
F200 avant et la R200 arrière . Dans ce cas, j'ai même eu un examen personnel: lors des vacances du Nouvel An en 2016, j'ai eu l'occasion de
tester les deux caméras à la maison . Il était prévu d'implémenter RealSense dans les ordinateurs portables,
smartphones et
autres ordinateurs , mais par la suite, tout était limité aux caméras pour PC.
 Caméra Intel RealSense SR300. 2016 année
Caméra Intel RealSense SR300. 2016 annéeLe temps a passé, le logiciel s'est amélioré, de nouveaux appareils photo sont sortis en premier de la
deuxième , puis de la
troisième génération. Chaque fois que de
nouvelles améliorations ont été introduites : la précision de la détermination de la profondeur a augmenté, la facilité d'utilisation, de nouvelles fonctions de reconnaissance sont apparues. Intel a continué d'
interagir avec les développeurs et de recevoir leurs commentaires. Sur le blog, nous avons activement publié des traductions en langue russe d'articles sur le
SDK RealSense - c'était l'une des rares sources d'informations sur RealSense en russe. Ce qui, en fait, est vrai à ce jour.
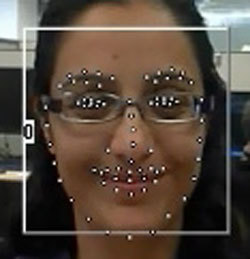 Intel RealSense SDK 1.0 a permis de suivre jusqu'à 76 points clés d'un visage; dans les versions futures, le nombre de points a augmenté
Intel RealSense SDK 1.0 a permis de suivre jusqu'à 76 points clés d'un visage; dans les versions futures, le nombre de points a augmentéActuellement, la famille de caméras Intel RealSense D400 lancée plus tôt cette année est pertinente. La famille se compose de deux caméras: D415 et D435. Le D415 donne une image plus claire, mais a une vitesse inférieure et une distance minimale plus éloignée. Le D435 est plus adapté aux applications AR / VR car son obturateur global fonctionne mieux avec les sujets se déplaçant rapidement. Des caractéristiques plus détaillées des caméras sont données dans le tableau.
| D415 | D435 |
|---|
| Candidature | Intérieur / extérieur |
| Détermination de la profondeur | Double faisceau infrarouge |
| Type d'obturateur | Coulissant | Global |
| Taille de pixel | 1,4 x 1,4 μm | 3 x 3 microns |
| Taille du champ de profondeur | 63,4 ° x 40,4 ° | 85,2 ° x 58 ° |
| Résolution du champ de profondeur | 1280 x 720 |
| Options de flux RVB | 1080p @ 30 FPS |
| Plage de profondeur | 0,16 - 10 m | 0,11 - 10 m |
| Taille de la caméra (L x P x H) | 99 x 20 x 23 mm | 90 x 25 x 25 mm |
Maintenant, la caméra D435 a subi une modernisation - comme déjà mentionné, un capteur de mouvement IMU inertiel à 6 axes y a été ajouté. Malgré la petitesse des changements, ils ne peuvent en aucun cas être considérés comme sans importance, car ils ouvrent de nouvelles perspectives pour RealSense. Si auparavant, la caméra était généralement supposée être un objet statique, maintenant les données de position et de mouvement sont ajoutées à l'image tridimensionnelle - précieuses en elles-mêmes et, en outre, augmentant la précision de la détermination de la profondeur. RealSense est devenu plus facile et plus pratique à utiliser pour déplacer des objets tels que des drones ou des robots. Et les appareils mobiles intelligents, à leur tour, ont reçu un "troisième œil", qui vous permet de mettre en œuvre une fonctionnalité fondamentalement nouvelle. De plus, IMU fonctionne avec le framework
ROS (Robot Operating System) et, par conséquent, peut être utilisé avec toutes les plates-formes de robots compatibles ROS.
Intel RealSense D435i est maintenant en
pré-commande , les livraisons commenceront le 3 décembre, le prix actuel est de 199 $.