
Si vous utilisez ROS lors de la création de robots, vous savez probablement qu'il prend en charge le travail avec des caméras stéréo. Vous pouvez par exemple créer une carte de profondeur de la partie visible de l'espace ou un nuage de points. Et je me demandais à quel point il serait facile d'utiliser une caméra stéréo StereoPi à base de framboise dans ROS. Plus tôt, j'étais déjà convaincu que la carte de profondeur était parfaitement construite par OpenCV, mais je n'ai jamais traité de ROS. Et j'ai décidé de l'essayer. Je veux parler de mes aventures dans la recherche d'une solution.
1. Y a-t-il un ROS sur le Raspberry Pi?
Au début, j'ai décidé de découvrir s'il était possible de construire ROS pour le Raspberry Pi. La première chose que Google m'a dit était une liste d'instructions pour l'installation de différentes versions de ROS sur le Raspberry Pi, à savoir cette page
wiki ROSEh bien, il y a déjà quelque chose pour commencer! Je me suis bien souvenu du temps qu'il a fallu pour créer OpenCV sur Raspberry (environ huit heures), j'ai donc décidé de rechercher des images de carte MicroSD prêtes à l'emploi pour gagner du temps.
2. Existe-t-il des images de cartes microSD prêtes à l'emploi avec ROS pour Raspberry?
Il s'est avéré que ce problème avait déjà été résolu par plusieurs équipes de développement. Si vous ne prenez pas de versions uniques par des passionnés, deux images se sont démarquées qui sont constamment mises à jour avec la sortie de nouvelles versions du système d'exploitation et de ROS.
La première option est ROS installé sur le système d'exploitation Raspbian natif de l'équipe ROSbots, voici une page avec un lien d'image mis à jour: image
prête à l'emploi-raspbian-stretch-ros-opencvLa seconde est les
images d'Ubiquiti Robotics sur Ubuntu .
Eh bien, la deuxième question a également été assez rapidement close. Il est temps de plonger plus profondément.
3. Comment fonctionne ROS avec la caméra Raspberry Pi?
Et quelles caméras stéréo sont généralement prises en charge dans ROS? J'ai regardé la page avec les caméras stéréo, pour laquelle la disponibilité de pilotes prêts à l'emploi pour ROS a été déclarée, celle-ci:
wiki.ros.org/SensorsIl y avait deux sections:
2.3 Capteurs 3D (télémètres et caméras RGB-D)
2.5 CamérasIl s'est avéré que dans la première section, non seulement les caméras stéréo, mais aussi les capteurs TOF et les lidars à balayage sont répertoriés - en général, tout ce qui peut donner immédiatement des informations en 3D. Et dans le second, il y a déjà des caméras stéréo. Essayer de voir les pilotes de plusieurs caméras stéréo n'a pas ajouté à ma joie, car cela faisait allusion à une sérieuse immersion dans le code.
D'accord, reculez d'une étape. Comment ça marche avec une seule caméra Raspberry Pi dans ROS?
Trois agréables surprises m'attendaient ici:
- il se trouve que pour ROS il y a un nœud spécial raspicam_node juste pour travailler avec la caméra Raspberry Pi
- sortes de nœuds se trouvent sur le github, le code est activement maintenu et bien documenté: github.com/UbiquityRobotics/raspicam_node
- l'auteur du nœud Rohan Agrawal ( @Rohbotics ) travaille pour une entreprise qui prend activement en charge l'une des images prêtes à l'emploi pour le Raspberry Pi
J'ai regardé le dépôt gaspub raspicam_node et j'ai regardé les problèmes. Là, j'ai trouvé un problème ouvert avec le nom volumineux "mode stéréo" il y a près de sept mois, sans réponses ni commentaires. En fait, tous les événements s'y sont développés davantage.
4. Hardcore ou pas?
Afin de ne pas poser de questions aux enfants aux auteurs, j'ai décidé de regarder le code source et d'évaluer ce qui menace l'ajout du mode stéréo. J'étais plus intéressé par la partie système ici:
github.com/UbiquityRobotics/raspicam_node/tree/kinetic/srcEh bien, les gars ont écrit le pilote plongeant dans le niveau MMAL. Je me suis également souvenu que le code source des framboises en mode stéréo est également ouvert (l'évolution peut être retracée
ici sur le forum framboise ), et la tâche d'écrire un pilote stéréo à part entière est résoluble, mais à grande échelle. En regardant la description des pilotes d'autres caméras, j'ai réalisé qu'il était nécessaire de publier non seulement les images de gauche et de droite, mais aussi de donner les paramètres des deux caméras, d'appliquer des résultats d'étalonnage à chacune et de faire bien d'autres choses. Cela a attiré des expériences d'un mois ou deux. Par conséquent, j'ai décidé de paralléliser l'approche, à savoir: écrire à l'auteur une question sur le support stéréo et rechercher moi-même une solution plus simple mais fonctionnelle.
5. Dialogues avec l'auteur
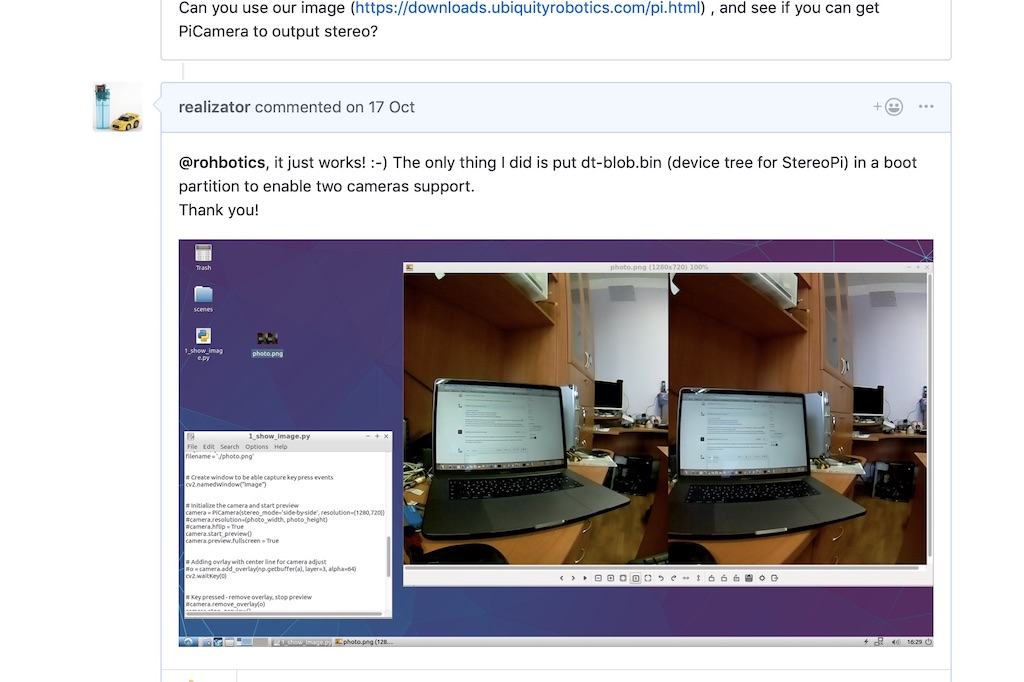
Dans le fil sur le mode stéréo sur le github, j'ai posé une question à l'auteur, mentionnant que la stéréo est supportée par les framboises depuis 2014, et lui ai suggéré, si nécessaire, de lui envoyer une carte de débogage pour des expériences. Permettez-moi de vous rappeler que je doutais encore que dans cette distribution, la stéréo fonctionnera comme dans le Raspbian natif.
Rohan a répondu étonnamment rapidement, disant que leur distribution utilise un noyau de framboise et que tout devrait fonctionner. Et a demandé de le vérifier sur l'un de leurs assemblées.
Noyau de framboise! Hourra! Théoriquement, une image stéréo doit être capturée sans danser avec un tambourin!
J'ai téléchargé et déployé leur dernière image en
utilisant un lien de Rohan et j'ai exécuté un simple script python pour capturer une paire stéréo. Ça a marché!
Après cela, Rohan a écrit qu'il examinerait le code du pilote pour le mode stéréo et a écrit quelques questions. Par exemple, notre mode stéréo produit une image collée, et nous aurions besoin de la couper en deux - gauche et droite. Et la deuxième question sur les paramètres d'étalonnage de chaque caméra est de savoir comment y faire face.
J'ai dit que dans un premier temps, vous pouvez prendre des photos à partir d'appareils photo indépendamment. Oui, ils ne seront pas synchronisés dans le temps de capture et les paramètres (tels que la luminosité, le contraste et la balance des blancs), mais dans un premier temps, cela pourrait bien se produire.
Rohan a rapidement
déployé un correctif qui vous permet de spécifier directement à partir de ROS l'appareil photo à partir duquel prendre des photos. Je l'ai vérifié - le choix d'un appareil photo fonctionne, c'est déjà un excellent résultat.
6. Aide inattendue
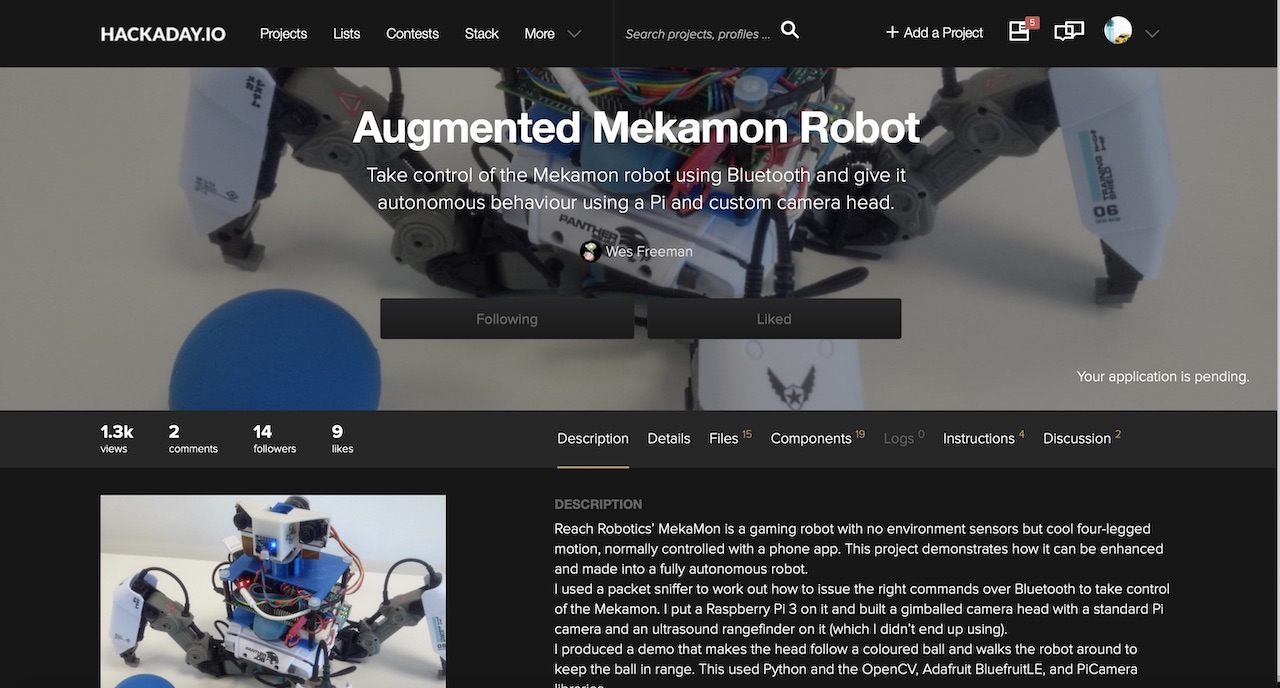
Et puis un commentaire de l'utilisateur Wezzoid apparaît dans le fil. Il a dit qu'il faisait un projet basé sur une caméra stéréo sur un Pi Compute 3 utilisant des devboards framboises. Son robot marchant à quatre pattes a suivi la position d'un objet dans l'espace, a changé la position des caméras et a gardé une distance prédéterminée par rapport à celui-ci (le projet est affiché sur hackaday.io
ici ).
Et il a partagé le code dans lequel il a saisi l'image, l'a coupée en deux avec des moyens python et l'a partagée comme des nœuds des caméras gauche et droite.
Python n'est pas un ami très rapide dans ces domaines, il a donc utilisé une faible résolution de 320x240 et un bon hack de vie. Si nous capturons une image stéréo côte à côte (une caméra à gauche de l'image stéréo, la seconde à droite), le python doit couper chacune des 240 lignes en deux. Mais si vous faites une image de haut en bas (la caméra de gauche est la moitié supérieure du cadre, la droite est en bas), le python coupe le tableau en deux en une seule opération. Ce qui a été fait avec succès par l'utilisateur Wezzoid.
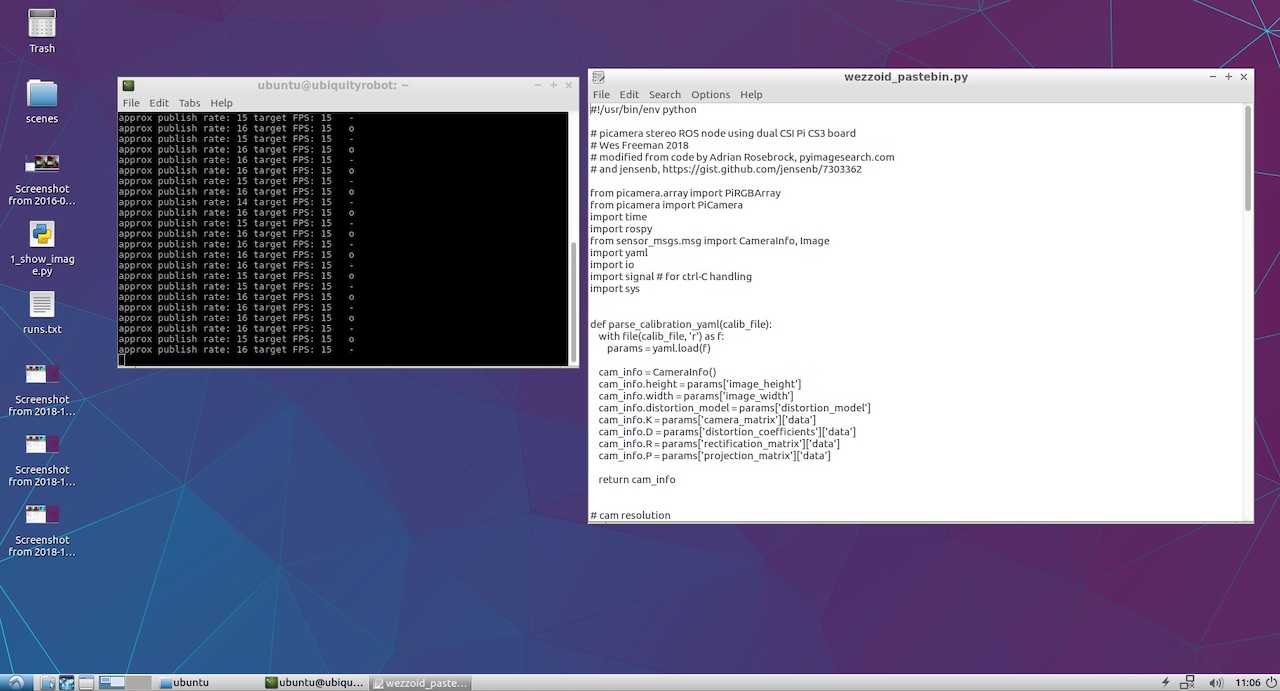
De plus, il a publié son code python sur Pastebin, qui a effectué cette opération. Le voici:
Code Wezzoid pour publier les nœuds de deux caméras à partir d'une paire stéréo 7. Commencez à publier les nœuds des caméras gauche et droite
Au premier démarrage, le code a maudit qu'il n'y avait pas d'accès aux fichiers YML avec les paramètres de la caméra. J'ai utilisé des caméras V2 de couleur framboise et je me suis souvenu que des fichiers prêts avec des résultats d'étalonnage pour différents modèles de caméras étaient arrivés à
raspicam_node sur le github:
github.com/UbiquityRobotics/raspicam_node/tree/kinetic/camera_infoJ'ai pris l'un d'eux, en ai fait deux copies et je l'ai enregistré sous les noms left.yml et right.yml, en y inscrivant la résolution de la caméra à partir du script de l'auteur. Voici ce qui s'est passé pour la caméra de gauche:
left.yml image_width: 320 image_height: 240 camera_name: left camera_matrix: rows: 3 cols: 3 data: [1276.704618338571, 0, 634.8876509199106, 0, 1274.342831275509, 379.8318028940378, 0, 0, 1] distortion_model: plumb_bob distortion_coefficients: rows: 1 cols: 5 data: [0.1465167016954302, -0.2847343180128725, 0.00134017721235817, -0.004309553450829512, 0] rectification_matrix: rows: 3 cols: 3 data: [1, 0, 0, 0, 1, 0, 0, 0, 1] projection_matrix: rows: 3 cols: 4 data: [1300.127197265625, 0, 630.215390285608, 0, 0, 1300.670166015625, 380.1702884455881, 0, 0, 0, 1, 0]
Pour la droite, le nom de la caméra est remplacé par droite et le fichier lui-même est nommé right.yml. Le reste du fichier est identique.
Comme je n'avais pas prévu de faire un projet complexe, je n'ai pas répété les longs chemins de l'auteur avec des sous-dossiers et j'ai simplement mis les fichiers à la racine du dossier personnel à côté du script python. Le code a démarré avec succès, affichant des messages d'état dans la console.
Il ne restait plus qu'à voir ce qui a finalement été publié par nos caméras gauche et droite. Pour ce faire, j'ai lancé rqt_image_view. Les éléments / left / image_raw et / right / image_raw sont apparus dans le menu déroulant. Lorsque je les ai sélectionnés, j'ai vu des images des caméras gauche et droite.
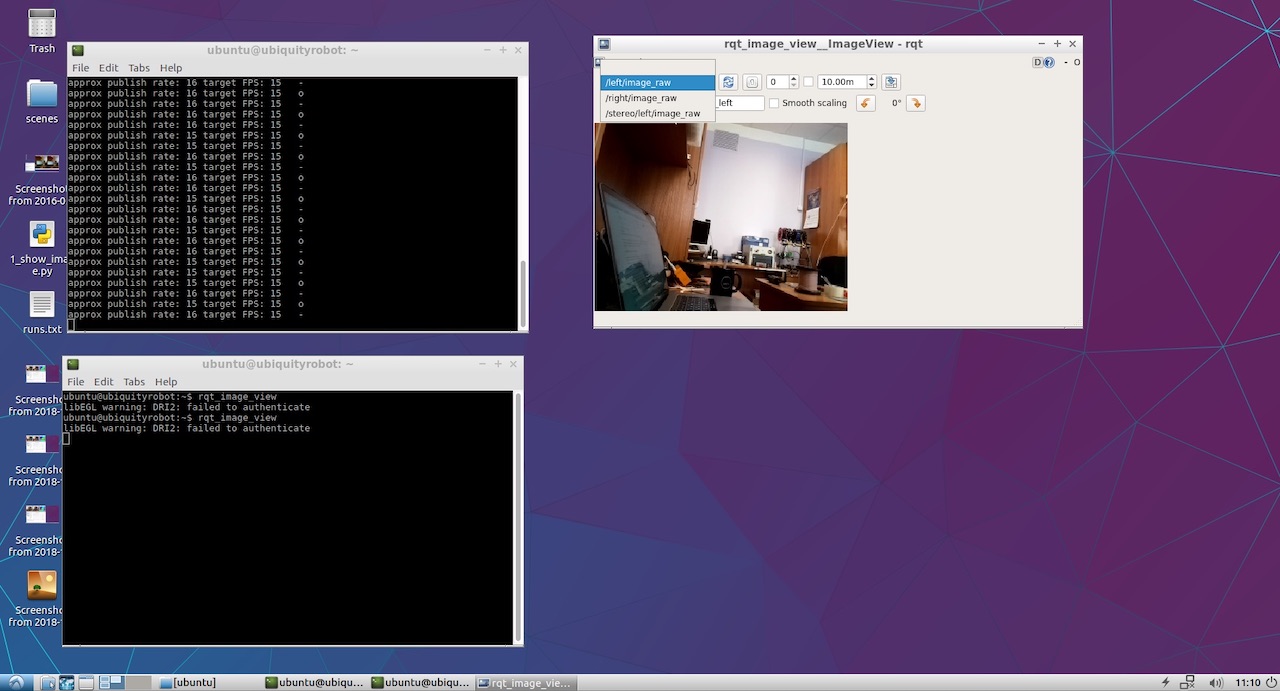
Eh bien, cette chose a gagné! Maintenant, la partie amusante.
8. Nous regardons la carte des profondeurs.
Pour voir la carte de profondeur, je n'ai pas trouvé ma propre approche et j'ai parcouru le
manuel ROS classique
pour régler les paramètres stéréo .
À partir de là, j'ai découvert qu'il serait bien de publier les deux nœuds dans un espace de noms spécifique, et non à la racine comme l'a fait Wezzoid. En conséquence, les anciennes lignes de publication du formulaire
left_img_pub = rospy.Publisher('left/image_raw', Image, queue_size=1)
a commencé à ressembler à ceci:
left_img_pub = rospy.Publisher('stereo/right/image_raw', Image, queue_size=1)
Après cela, nous lançons le nœud de traitement du mode stéréo stereo_image_proc:
ROS_NAMESPACE=stereo rosrun stereo_image_proc stereo_ige_proc
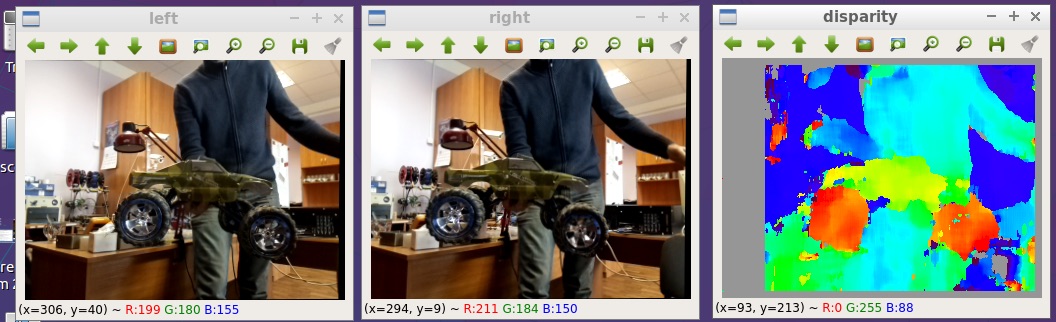
Eh bien, nous voulons également regarder le résultat, alors nous commençons l'observateur:
rosrun image_view stereo_view stereo:=/stereo image:=image_rect_color
Et pour configurer les paramètres de la carte de profondeur, exécutez l'utilitaire de configuration:
rosrun rqt_reconfigure rqt_reconfigure
En conséquence, nous voyons l'image au tout début de l'article. Voici un peu plus grand:
Tous les fichiers que j'ai postés sur le github:
github.com/realizator/StereoPi-ROS-depth-map-test9. Plans immédiats
Après ma publication du résultat dans une discussion sur le github, Rohan a écrit «Cool! Je dois aller chercher mon StereoPi. " Nous lui avons écrit par mail, je lui ai envoyé des honoraires. J'espère qu'avec le matériel de travail entre ses mains, il lui sera plus facile de terminer et de déboguer un pilote stéréo à part entière pour ROS et Raspberry.
10. Résumé
Une carte de profondeur à partir d'une image stéréo sur des framboises dans ROS peut être obtenue de plusieurs façons. Le chemin choisi pour une vérification rapide n'est pas le plus optimal en termes de performances, mais peut être utilisé à des fins d'application. La beauté de sa simplicité et la possibilité de commencer immédiatement des expériences.
Eh bien, du drôle: après avoir reçu les résultats, j'ai remarqué que Wezzoid, qui a proposé sa solution, était l'auteur de la question sur la publication de deux images stéréo. Il s'est demandé, il a décidé.