«Houston, nous avons des problèmes», a dit une voix fatiguée dans mon cerveau, essayant de passer la nuit dans la fiche technique InvenSense IMU MPU-9250. Lorsque tous les mots individuellement sont compréhensibles, mais leur relation est confondue avec l'impossibilité. Tout a commencé avec le paramètre LSB, dont je ne me rappelais que vaguement qu'en traduction c'était le bit le moins significatif. Puis est allé «Résolution», «Sensibilité», et encore plus loin, j'ai réalisé que le texte résultant peut déjà être intitulé «Fiche technique pour les nuls».
Un peu sur les principaux blocs du module inertiel.
Gyroscope MEMS
Le MPU-9250 se compose de trois capteurs de vitesse angulaire vibrationnelle uniaxiale indépendants (gyroscopes MEMS) qui répondent à la rotation autour des axes X, Y et Z. Deux masses suspendues oscillent dans des axes opposés. Avec l'avènement de la vitesse angulaire, l'effet Coriolis provoque un changement de direction des vibrations (
vecFK=−2m[ vec omega times vecvr] qui est fixé par un capteur capacitif. La composante capacitive différentielle mesurée est proportionnelle à l'angle de mouvement [Temps électronique]. Le signal résultant est amplifié, démodulé et filtré, résultant en une tension proportionnelle à la vitesse angulaire de rotation. Ce signal est numérisé à l'aide du CAN 16 bits intégré. La fréquence d'échantillonnage peut varier par programme de 3,9 à 8 000 échantillons par seconde (échantillons par seconde, SPS), et les filtres passe-bas (LPF) définis par l'utilisateur offrent une large gamme de fréquences de coupure possibles. Le filtre passe-bas est nécessaire, en particulier, pour éliminer les vibrations des moteurs (en général, au-dessus de 20-25 Hz).
Accéléromètre MEMS à trois axes
Utilise une masse d'essai distincte pour chaque axe, qui se déplace lorsque l'accélération se produit le long de cet axe (fixée par des capteurs capacitifs). L'architecture MPU-9250 réduit l'exposition aux dérives de température et aux variations des paramètres électriques. Lorsque l'appareil est situé sur une surface plane, il mesure 0g le long des axes X et Y et + 1g le long de l'axe Z.
Le facteur d'échelle (
facteur d' échelle - le rapport entre la variation du signal de sortie et la variation du signal mesuré de sortie) est calibré en usine et ne dépend pas de la tension d'alimentation. Chaque capteur est équipé d'un ADC sigma-delta individuel (composé d'un modulateur et d'un filtre passe-bas numérique, plus sur l'appareil dans [Easyelectronics]), dont la sortie numérique a une plage de mesure réglable.
Et à peu près le magnétomètre MEMS à trois axes
Basé sur la technologie à effet Hall de haute précision. Il comprend des capteurs magnétiques qui déterminent l'intensité du champ magnétique de la terre le long des axes, un circuit de commande, un circuit d'amplification de signal et un circuit de calcul pour traiter les signaux de chaque capteur. Chaque ADC a une résolution de 16 bits, une plage de mesure
pm4800 muT . Pour mesurer les champs magnétiques faibles, une unité du système microtesley SI (μT) ou gauss (G, système GHS) est utilisée:
1G.=100 muT , [Radio Pilot]).
Alors, qu'est-ce que le LSB et comment le calculer? Instruction de production
Disons que notre accéléromètre fonctionne maintenant dans la plage de mesure
FS= pm2g c'est-à-dire que la gamme complète des valeurs possibles sera
2 cdotFS=4g . Les valeurs de tension correspondantes sont numérisées par un ADC 16 bits, qui peut diviser tout l'intervalle autant que possible

étapes. L'incrément minimum qui peut être détecté n'est qu'une étape
LSB=2 cdotFS/65536 . Ici, nous devons nous rappeler que le compte est effectué à partir de zéro, de sorte qu'en fait la valeur maximale mesurée sera
2 cdotFStrue=(216−1)∗LSB=65535∗LSB=2 cdotFS−LSB . C'est-à-dire que plus il y a de bits dans un mot numérique ADC ou DAC, plus l'écart est petit. Dans ce cas, la
sensibilité (parfois appelée facteur d'échelle, facteur d'échelle de sensibilité) du capteur dans une plage spécifique sera déterminée comme le rapport du signal de sortie électrique et de l'impact mécanique. Indiqué traditionnellement pour une fréquence de signal de 100 Hz et une température
T=+25 circC. Pour le MPU-9250, la sensibilité est
216/(2 cdotFS) étapes pour chaque g ou
circ/s (
LSB/g ,
LSB/( circ/s) ), pour un autre IMU, BMI088 de Bosch Sensortec, la sensibilité gyroscopique est calculée de la même manière, et pour l'accéléromètre, elle est utilisée
(216−24)/(2 cdotFS) étapes pour chaque g.

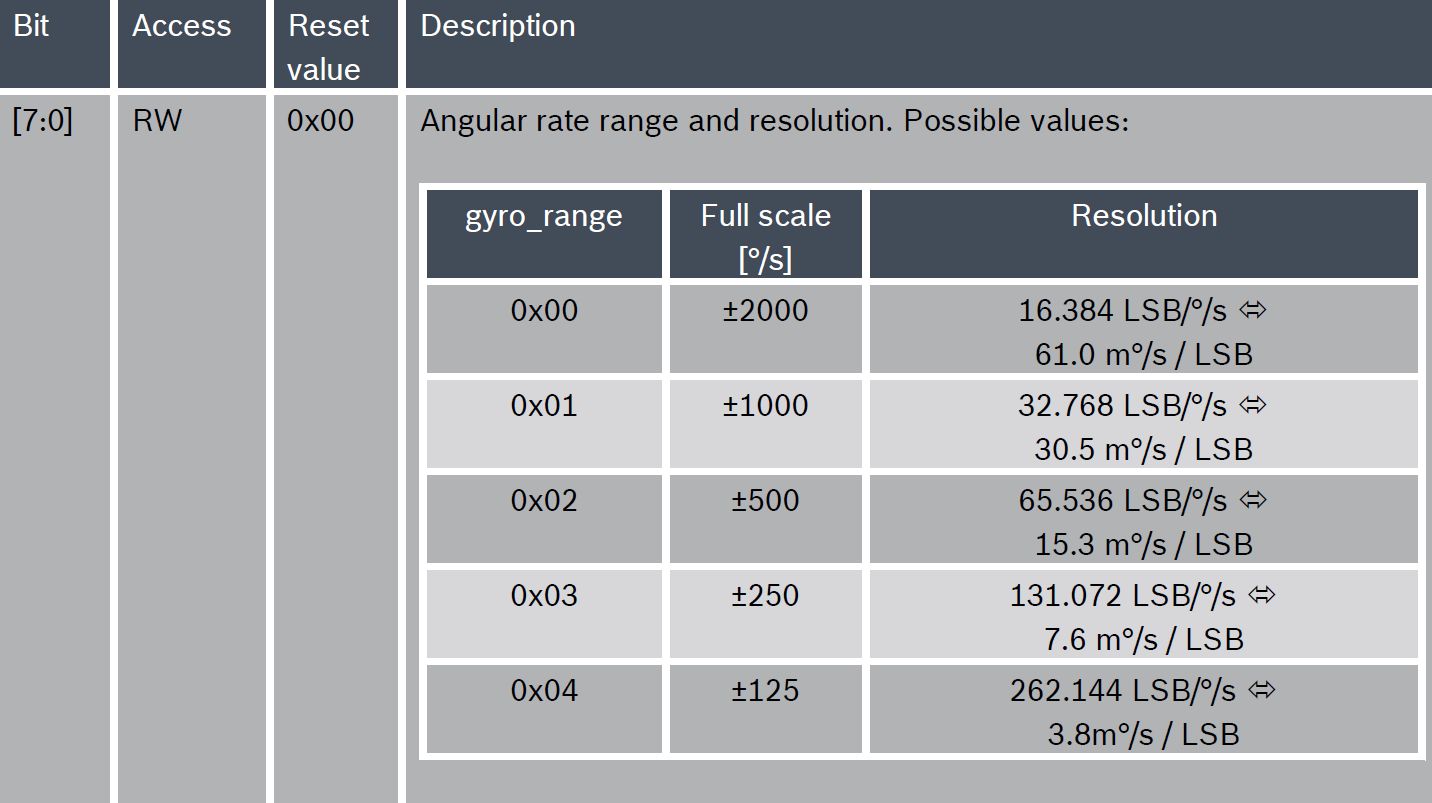
Nous retirons les variantes FS de la spécification des gyroscopes et, pour ne pas se lever deux fois, des accéléromètres.

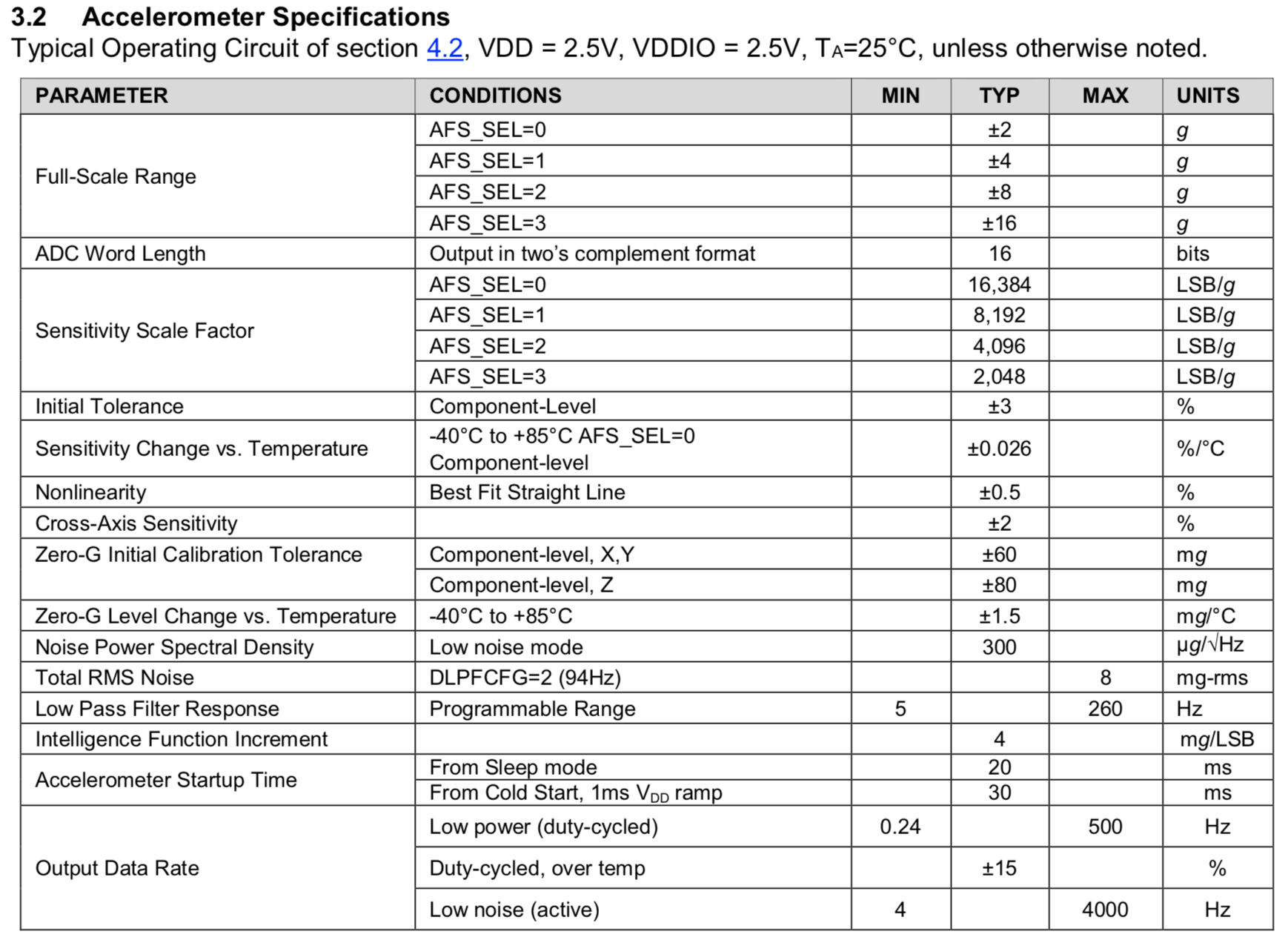
J'ai également pris FS pour les accéléromètres de la documentation de BMI088 (voir ci-dessous).
| Gyroscope, 16 bits (2N=65535) | Accéléromètre, 16 bits (2N=65535) |
|---|
| Gamme (FS) circ/s (dps) | LSB, circ/s (dps) | Gamme (FS), g | LSB mg |
| pm125 (FS = 250) | 0,004 | pm2 (FS = 4) | 0,06 |
| pm250 (FS = 500) | 0,008 | pm3 (FS = 6) | 0,09 |
| pm500 (FS = 1000) | 0,0015 | pm4 (FS = 8) | 0,12 |
| pm1000 (FS = 2000) | 0,03 | pm6 (FS = 12) | 0,18 |
| pm2000 (FS = 4000) | 0,06 | pm8 (FS = 16) | 0,24 |
| | pm12 (FS = 24) | 0,37 |
| | pm16 (FS = 32) | 0,48 |
| | pm24 (FS = 48) | 0,73 |
Tout, semble-t-il, s'est mis en place, vous pouvez avancer. Dans certains cas (ci-dessous, par exemple, un extrait de la documentation de BMI088), un paramètre tel que la résolution est indiqué séparément.
En fait, il semble que ce devrait être un LSB. Mais alors pourquoi voyons-nous une valeur au lieu de plusieurs liée à des plages spécifiques? J'ai dû élargir la liste des sources étudiées à la recherche de réponses.

Qu'est-ce que la résolution?
La valeur minimale que le capteur voit de manière fiable est extrêmement importante lorsque vous essayez de trouver un équilibre entre le prix et les performances. Ce n'est pas de la précision - un capteur haute résolution peut ne pas être particulièrement précis, tout comme un capteur basse résolution dans certaines zones peut avoir une précision suffisante. Malheureusement, le LSB ne définit que la valeur minimale minimale théorique, à condition que nous puissions utiliser les 16 bits de l'ADC. Il s'agit d'une résolution dans le monde numérique. En analogique, certaines étapes seront bruyantes et le nombre de bits effectifs sera moindre.
Quelles sont les caractéristiques du bruit et d'où vient-il?
Les sources de bruit peuvent être généralement divisées en bruit électronique d'un circuit qui convertit le mouvement en un signal de tension (bruit thermique Johnson, bruit de tir, bruit de scintillement rose 1 / f, etc.) et mécanique mécanique (brownien en raison de la présence de petites pièces mobiles) du capteur lui-même. Les caractéristiques de ce dernier dépendront de la fréquence de résonance de la partie mécanique du système
f0 (fréquence d'oscillation naturelle du capteur
omega0=2 pi/f0 )
Bruit RMS sur toute la gamme spectrale - Bruit RMS total (racine quadratique moyenne)
Les niveaux de bruit peuvent être déterminés de plusieurs manières. Vous pouvez les considérer dans le domaine temporel ou fréquentiel (après la transformée de Fourier). Dans le premier cas, le bruit résiduel est pris comme la valeur efficace des signaux du capteur fixe (en fait, c'est l'écart-type pour l'échantillonnage à
overlinex=0 ) pendant un certain temps:
xRMS= sigmaX= sqrt sumni=1(xi− overlinex)2 overn−1
Les accélérations ou les vitesses de rotation angulaires inférieures au niveau de bruit à large bande seront indiscernables - c'est la résolution réelle. La valeur efficace d'une tension ou d'un courant alternatif (souvent appelé actif ou efficace) est égale à la valeur d'un signal constant dont l'action effectuera le même travail dans une charge active (résistive) pendant la période. Cette approche est plus efficace lors de l'évaluation du bruit à large bande, où le bruit blanc domine.
Pour le bruit blanc, le rapport de l'amplitude (valeur de crête instantanée) à la valeur efficace avec une probabilité de 99,9% est
NPP/NRMS=6,6. Ce rapport est appelé facteur croisé (facteur de crête, rapport croisé). Vous pouvez choisir une probabilité de 95,5% - le facteur croisé sera 4.

En fait, les signaux de bruit ne se comportent pas aussi bien et peuvent produire des pics qui augmentent le facteur de croisement jusqu'à 10 fois. Dans certaines spécifications, vous pouvez trouver les valeurs
NPP ou le multiplicateur lui-même.
Dans une bande étroite de basses fréquences de 0,1 à 10 Hz, le rôle principal est joué par le bruit de scintillement «1 / f», qui est estimé en utilisant l'amplitude du signal de bruit crête à crête.
Densité spectrale
Parfois, un signal est plus commode à considérer dans le domaine fréquentiel, où sa description est appelée le
spectre (la dépendance de l'amplitude et de la phase de la fréquence). L'une des caractéristiques possibles du bruit dans les spécifications est appelée
densité spectrale de puissance du bruit (PSD), densité spectrale de bruit, densité de puissance de bruit ou simplement
densité de bruit ). Décrit la distribution de la puissance du bruit sur une plage de fréquences. Quelle que soit la représentation du signal électrique par le courant ou la tension, la puissance instantanée dissipée sur la charge peut être normalisée (R = 1 Ohm) et exprimée en
p(t)= nu2(t)/R=i2(t)R=x2(t). Puissance moyenne dissipée par le signal sur une période de temps
(−T/2,T/2),PTx= frac1T intT/2−T/2x2(t)dt.
La puissance est le taux d'entrée d'énergie. Les signaux déterminés et non périodiques sont déterminés par l'énergie. Les signaux périodiques et aléatoires sont exprimés en termes de puissance, car ils ne sont pas limités dans le temps et, par conséquent, en énergie, et à tout moment, leur puissance moyenne est non nulle
Px= limT to infty frac1T intT/2−T/2x2(t)dt.
Vous pouvez vous rappeler [Sklyar] qu'un signal périodique arbitraire est exprimé par une combinaison d'un nombre infini d'harmoniques avec des fréquences croissantes:
x( lambda)= fraca02+ sum inftyn=1(an cosn lambda+bn sinn lambda),
qu'après avoir représenté le cosinus et le sinus sous forme exponentielle
cos lambda= fracei lambda+e−i lambda2, sin lambda= fracei lambda−e−i lambda2i
et remplacements
lambda= omegat=2 pif0t= frac2 pitT0 peut s'écrire
x(t)= fraca02+ frac12 sum inftyn=1[(an−ibn)ein omegat+(an+ibn)e−in omegat]= sum inftyn=− inftycnein omegat,
où sont les coefficients complexes (composantes spectrales) de la série de Fourier pour
x(t) ,
$$ afficher $$ \ commencer {équation} c_n = \ frac {1} {T_0} \ int ^ {T_0 / 2} _ {- T_0 / 2} x (t) e ^ {- in \ omega t}, dt = \ begin {cases} \ frac {1} {2} (a_n-ib_n), & n> 0 \\ \ frac {a_0} {2}, & n = 0 \\ \ frac {1} {2} ( a_n + ib_n), & n <0 \ end {cases} \ end {equation} $$ display $$
Dans le cas général, ces coefficients sont représentables comme suit:
cn=|cn|ei thetan,
|cn|= frac12 sqrta2n+b2n, thetan= arctan left( fracbnan right),b0=0,c0= fraca02.
L'amplitude et le spectre de phase sont appelés graphiques de dépendance.
|cn| et
thetan de la fréquence. Densité spectrale de puissance
PSD(f) signal périodique
x(t) donne la répartition de la puissance du signal sur une plage de fréquences:
PSD(f)= sum inftyn=− infty|cn|2 delta(f−nf0)
et a une dimension
[W/Hz]=[x2/Hz]. La puissance moyenne normalisée du signal réel sera
Px= int infty− inftyPSD(f),df.
Les signaux aléatoires non périodiques (en particulier le bruit) peuvent être décrits comme périodiques au sens limitatif. Si
T0 tend à l'infini, la séquence d'impulsions se transforme en une impulsion distincte
x(t) , le nombre de raies spectrales tend vers l'infini, le graphique spectral se transforme en un spectre de fréquence lisse
X(f). Pour ce cas limite, nous pouvons déterminer une paire de transformées de Fourier intégrales
X(f)= int infty− inftyx(t)e−i2 pift,dt
et
x(t)= int infty− inftyX(f)ei2 pift,df,
où
X(f) - Image de Fourier.
La densité spectrale de puissance d'un signal aléatoire est déterminée par la limite
PSD(f)= limT to infty frac1T|XT(f)|2.
et décrit la distribution de la puissance du signal dans la gamme de fréquences.
Puisque nous supposons que la moyenne du bruit blanc des capteurs à l'état stationnaire est nulle (
overlinex= overlinex2=0 ), alors le carré de la valeur efficace est égal à la variance et représente la puissance totale dans la charge normalisée:
Noise2RMS= sigma2x=Px= int infty0PSD(f),df= intBandepassante0PSD(f),df=PSD(Badnwidth−0)
NoiseRMS= sqrtDensitédubruit foislabandepassante
Nous regardons dans la spécification - là, en fait, sa racine carrée avec la dimension correspondante est indiquée sous le nom de densité spectrale
[ circ/s/ sqrtHz] ou
[ mug/ sqrtHz]. C'est-à-dire que la valeur du bruit RMS sans indiquer la bande de fréquence sur laquelle il a été lu (Bande passante) n'a pas de sens.
Un peu plus sur le choix de la bande passante
A la sortie du capteur MEMS, nous obtenons des signaux de fréquences différentes. On suppose que nous avons une certaine idée des processus que nous mesurons à l'avance. Par exemple, lors de la détermination du vecteur d'accélération d'un drone, le bruit est la vibration de l'appareil. Vous pouvez les séparer du signal utile à l'aide d'un filtre passe-bas qui coupe toutes les fréquences supérieures à celle spécifiée (par exemple, 200 Hz). Le MPU-9250 offre la possibilité d'ajuster la fréquence de coupure du filtre passe-bas à l'aide du paramètre portant le nom magique
DLPFCFG . Il signifie Configuration du filtre passe-bas numérique. Plus loin dans la spécification, des expressions non moins mystérieuses du type (DLPFCFG = 2, 92Hz) ont fait surface ici et là, mais pour le décodage j'ai dû grimper dans un autre document, "Register Map and Descriptions". Il montre quels ensembles de bits dans lesquels les registres doivent être écrits pour obtenir les effets souhaités:
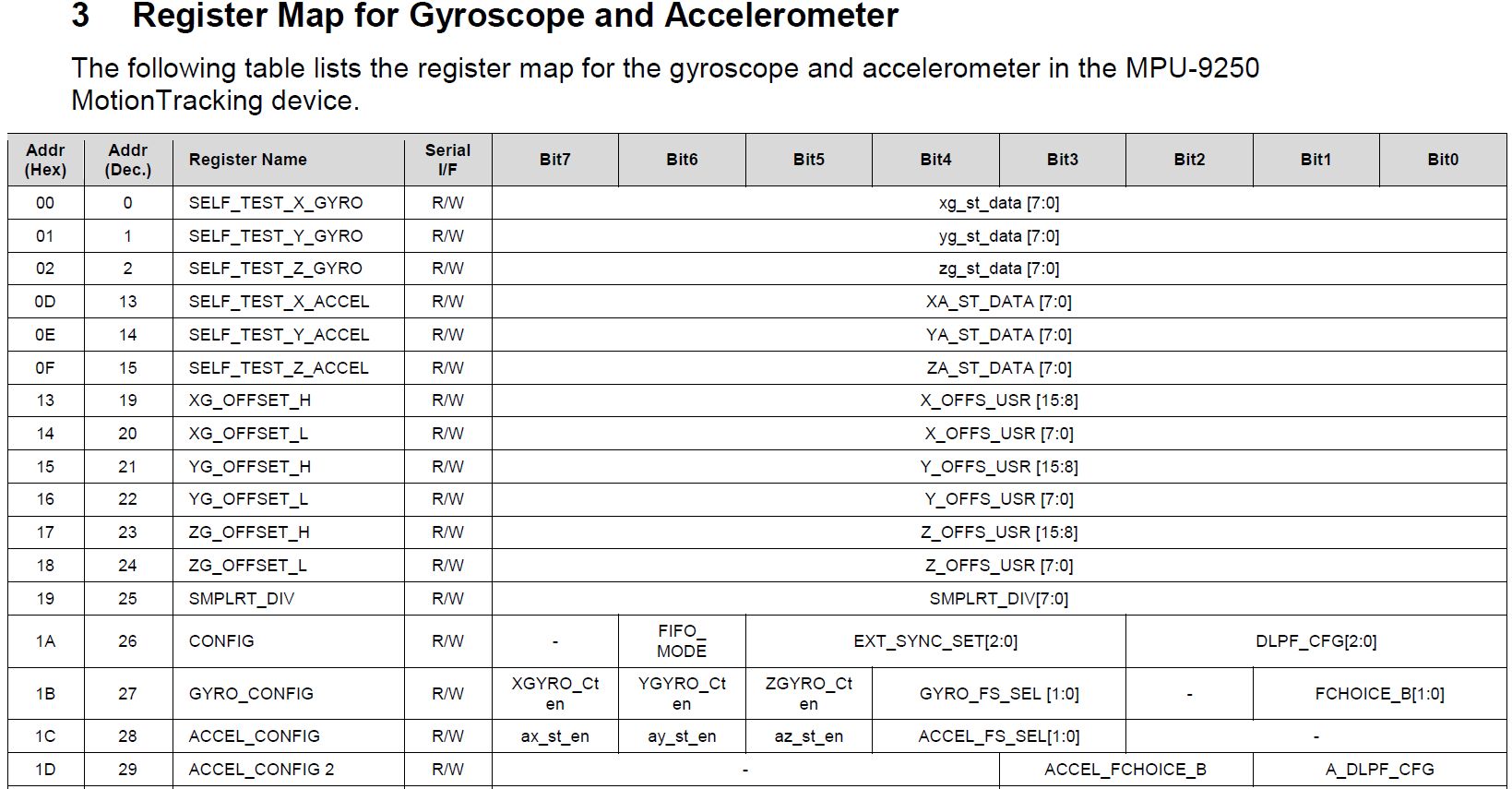
En omettant les détails techniques de la configuration, on peut dire ce qui suit. Dans ce capteur, un filtrage personnalisable des lectures non seulement des accéléromètres, des gyroscopes, mais aussi du capteur de température est effectué. Pour chacun, il existe un total de 7 à 10 modes, caractérisés par des concepts tels que la bande passante (Hz), le retard en ms, la fréquence d'échantillonnage (Fs) en kHz.

La colonne «Densité du bruit» dans
mug/rtHz= mug/ sqrtHz et la colonne «Bande passante» a été complétée par la valeur «3dB».
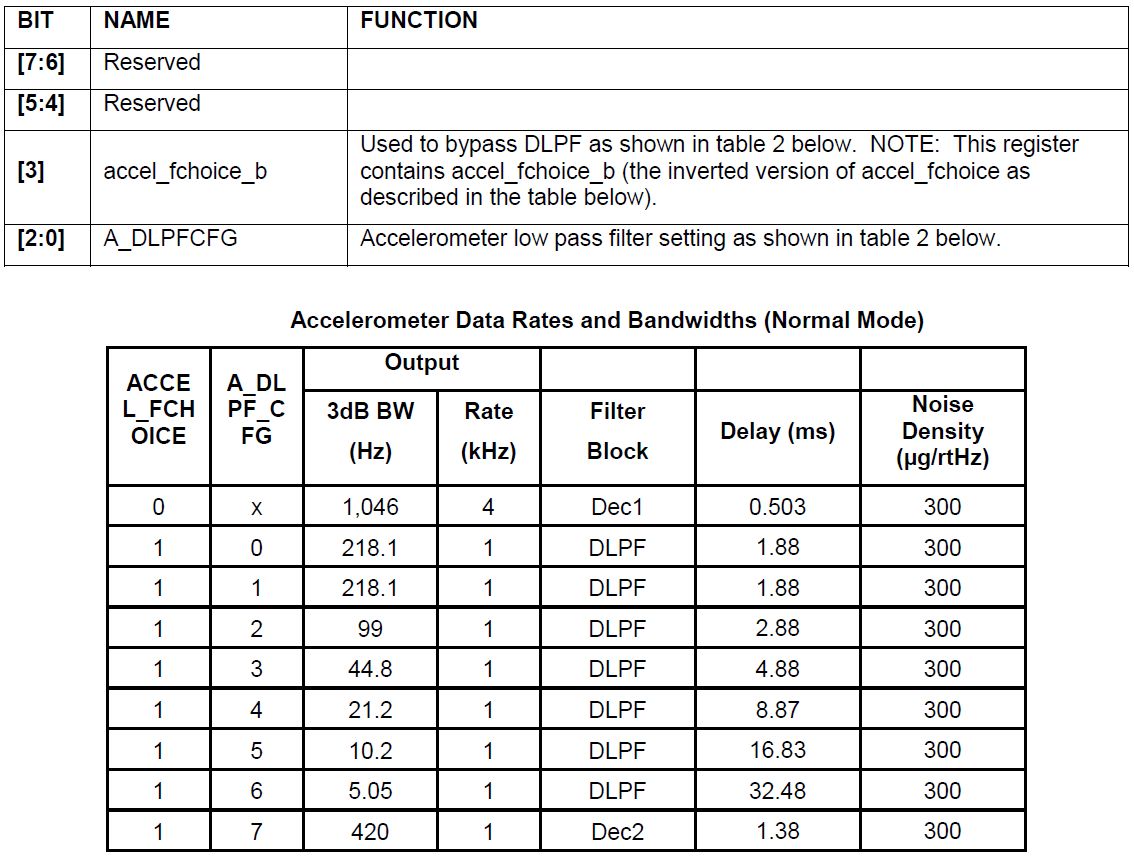
Ce n'est pas plus facile, alors parcourons la liste.
L'héritage de la Rome antique
Taux d'échantillonnage + décimation Delta Sigma ADC = débit de données de sortie numérique (ODR)Avec la fréquence d'échantillonnage (c'est la fréquence d'échantillonnage), tout est clair - c'est le nombre de points d'un signal continu dans le temps pris par seconde lors de son échantillonnage par l'ADC. Mesuré en hertz.
Fs= frac1 deltat
Afin d'obtenir une valeur proche de l'amplitude crête du signal, il est important de prendre une fréquence d'échantillonnage d'au moins 10 fois la fréquence du signal utile. Le MPU-9250 offre trois options: Fs = 32 kHz, 8 kHz, 1 kHz.
Mais cela ne signifie absolument pas que le signal à la sortie de l'accéléromètre ou du gyroscope apparaît avec la même période.
Si vous prenez les mêmes drones, alors tout repose sur la lutte pour réduire la consommation d'énergie, augmenter la vitesse des calculs et réduire le bruit des données de sortie. Vous pouvez réduire la fréquence de mise à jour des données de sortie en permettant aux algorithmes internes d'intégrer les informations d'entrée sur une période de temps. La valeur RMS diminuera, mais la bande passante se rétrécira également (le capteur ne peut détecter que les processus dont la fréquence sera inférieure à 50% du taux de mise à jour des données).
Ici, il vaut mieux rappeler tout de suite
le théorème de Kotelnikov . Elle promet que lors de l'échantillonnage d'un signal analogique, la perte d'informations peut être évitée (c'est-à-dire pour restaurer le signal sans distorsion) si la fréquence du signal utile n'est pas supérieure à la moitié de la fréquence d'échantillonnage, également appelée
fréquence de Nyquist . En pratique, un filtre anti-crénelage classique (un filtre passe-bas qui réduit la contribution des composantes de fréquence secondaires dans le signal de sortie à des niveaux négligeables - GOST R 8.714-2010) nécessite dans la plupart des cas une différence d'au moins 2,5 fois [Siemens].
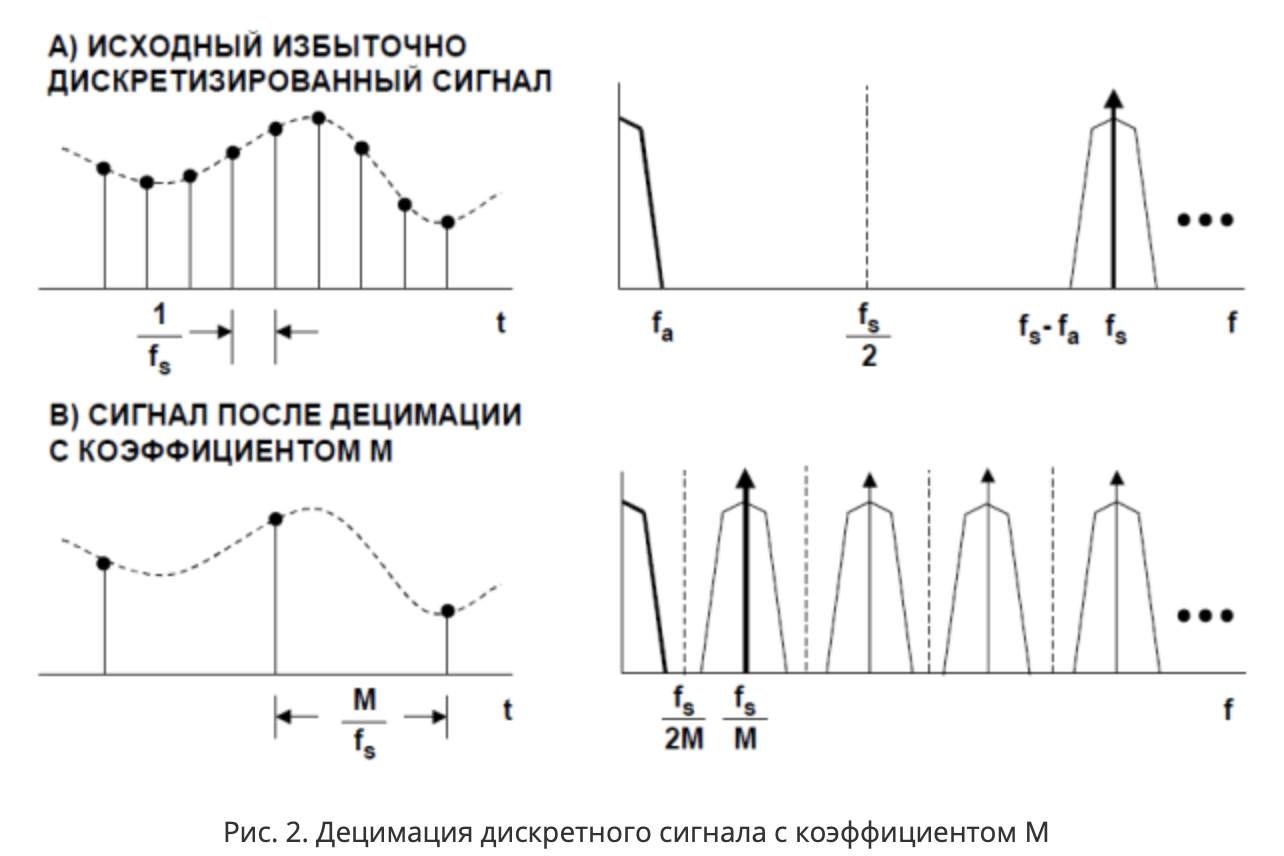
Pour Fs = 32 kHz, la fréquence de Nyquist sera de 16 kHz. Dans le même temps, il est peu probable qu'un signal utile dépasse la bande fa = 20Hz (peu peuvent changer la direction du mouvement plus de 20 fois par seconde). Au total, la fréquence d'échantillonnage est nettement supérieure à la fréquence nécessaire pour stocker les informations contenues dans la bande fa (40Hz, 400 fois plus élevée), c'est-à-dire que le signal utile est suréchantillonné. La bande entre les fréquences fa et fs-fa ne contient aucune information utile. Vous pouvez réduire le taux d'échantillonnage (dans le diagramme, cela a été fait avec le coefficient M, [7]) en affinant la séquence d'échantillons (échantillons). Ce processus est appelé
décimation .
Selon les spécifications du MPU-9250, les accéléromètres sont équipés d'un
ADC sigma-delta . Les schémas basés sur celui-ci consomment un minimum d'énergie. Il convient de noter que la bande passante de ces convertisseurs est très étroite, ne dépasse pas la plage sonore [Easyelectronics], mais pour un quadricoptère standard, plus n'est pas nécessaire. Ils se composent de deux blocs:
Sigma Delta -modulateur et filtre passe-bas de décimation numérique.
Pourquoi combiner filtre passe-bas et décimation?
Extrait honnête du wiki:
Si le signal d'origine ne contient pas de fréquences supérieures à la fréquence de Nyquist du signal décimé, la forme spectrale du signal reçu (décimé) coïncide avec la partie basse fréquence du spectre du signal d'origine. La fréquence d'échantillonnage correspondant à la nouvelle séquence d'échantillonnage est N fois inférieure à la fréquence d'échantillonnage du signal d'origine.
Si le signal d'origine contient des fréquences supérieures à la fréquence de Nyquist du signal décimé, la décimation entraînera un repliement (superposition des spectres).
Ainsi, pour conserver le spectre, il est nécessaire, avant la décimation, de supprimer du signal d'origine des fréquences supérieures à la fréquence de Nyquist du signal décimé. La spécification MPU-9250 ne contient pas beaucoup d'informations sur les caractéristiques du DLPF, mais des recherches par des passionnés peuvent être trouvées [9].
La bande passante, c'est la réponse en fréquence (réponse en fréquence)
la plage de fréquences dans laquelle le capteur détecte le mouvement et fournit un signal de sortie valide. Dans certaines spécifications, la réponse en fréquence du capteur est donnée - la dépendance de la sortie électrique de l'accéléromètre à des contraintes mécaniques externes avec une amplitude fixe mais des fréquences différentes. Dans la bande passante, l'inégalité de la réponse en fréquence ne dépasse pas une valeur donnée. Dans le cas de l'utilisation d'un filtre passe-bas numérique, le choix de la bande passante vous permet juste de changer la fréquence de coupure, affectant inévitablement la vitesse de réponse du capteur aux changements de position dans l'espace. La fréquence de coupure doit être inférieure à la moitié du débit de données de sortie numérique (ODR), également appelé fréquence de Nyquist.
Pour les accéléromètres MPU-9250, les limites de largeur de bande sont déterminées de sorte que dans la plage, la densité spectrale du signal ne diffère pas du pic (à une fréquence de 0 Hz) de -3 dB au maximum. Ce niveau correspond approximativement à une baisse de la moitié de la densité spectrale (ou 70,7% de l'amplitude spectrale de crête). Permettez-moi de vous rappeler, pour les quantités d'énergie (puissance, énergie, densité d'énergie) proportionnelles aux carrés de l'intensité du champ, exprimées en décibels, le rapport
DP=10 lgP2 surP1
.
Conclusion: les signaux qui ont traversé le filtre passe-bas sont moins bruyants, ils ont une meilleure résolution, mais moins de bande passante.
Par conséquent, spécifier la résolution dans la spécification sans référence à la bande passante n'a pas de sens.Retour à la résolution
Dans la spécification du MPU-9250, il n'y a fondamentalement aucune information sur la résolution, pour le BMI088 sous le nom de "Résolution" la résolution numérique (LSB) et la sensibilité sont présentées ":
La résolution de chaque bande passante peut être estimée par le bruit de pointe.
Noisepk−pk=TotalNoiseRMS timesCrestFactor=TotalNoiseRMS times4. La valeur quadratique moyenne du bruit à la sortie est liée à la densité spectrale indiquée dans la spécification (ou plutôt, la racine de celle-ci) et la bande passante de bruit équivalente (bande passante de bruit équivalente, ENBW) est la bande passante du système équivalent ayant une réponse en fréquence rectangulaire et la même valeur à la fréquence zéro que le système d'origine et la dispersion à la sortie, lorsqu'ils sont exposés aux entrées des systèmes de bruit blanc):
NRMS=PSD times sqrtENBW
Et la largeur de bande de bruit est connectée à la bande 3dB par des coefficients correspondant à l'ordre du filtre passe-bas:
ENBW=1,57 cdotf3dB textrmpourle1erordre
ENBW=1.11 cdotf3dB textrmpourle2èmeordre
ENBW=1.05 cdotf3dB textrmpourle3èmeordre
ENBW=1.025 cdotf3dB textrmpourle4èmeordre
A en juger par l'étude dans [MPU9250_DLPF], notre choix est 1.57. La valeur efficace obtenue tient compte de la contribution du bruit blanc (il n'y a ni bruit de quantification ni bruit mécanique). Par exemple, pour l'accéléromètre, la valeur calculée pour
BW=99Hz,PSD=300 mug/ sqrtHz il s'avère
NRMS=4mg . Dans ce cas, la spécification contient le bruit efficace total
BruitRMStotal=8mg. L'écart est significatif. Malheureusement, il est indiqué pour une seule bande, et pour l'accéléromètre BMI088, seul le PSD est indiqué dans la spécification. Nous allons donc utiliser ce qui est. Prenez le facteur croisé 4. Maintenant, le plus intéressant. Attitude
FS/Noisepk−pk donnera un ordre approximatif de bits effectifs dans cette plage de mesure, ce qui est décemment inférieur à la résolution de 16 bits de l'ADC.
| MPU-9250 | BMI088 |
|---|
| Gyroscope |
|---|
| smallNTotalRMS=0,1 circ/s(BW=92Hz) | smallNRMS=0,1 circ/s(BW=47Hz) |
|---|
| smallPSD=0,01 circ/s/ sqrtHz | smallPSD=0,014 circ/s/ sqrtHz |
|---|
| petitBW,Hz | smallNRMS, circ/s−rms | smallNPP, circ/s | petitBW,Hz | smallNRMS, circ/s | smallNPP, circ/s |
| | | 523 | 0,41 | 1,6 |
| 250 | 0,2 | 0,8 | 230 | 0,27 | 1.1 |
| 184 | 0,17 | 0,69 | 116 | 0,19 | 0,76 |
| 92 | 0,12 | 0,49 | 64 | 0,14 | 0,57 |
| 41 | 0,08 | 0,32 | 47 | 0,12 | 0,49 |
| 20 | 0,06 | 0,23 | 32 | 0,1 | 0,4 |
| 10 | 0,04 | 0,16 | 23 | 0,09 | 0,34 |
| 5 | 0,03 | 0,11 | 12 | 0,06 | 0,25 |
| Accéléromètre |
|---|
| smallNTotalRMS=8mg textrm(BW=99Hz) | smallPSDXY=160 mug/ sqrtHz |
|---|
| smallPSD=300 mug/ sqrtHz textrm(Gyrodésactivé) | smallPSDZ=190 mug/ sqrtHz(gFS3g, textrmModenormal) |
|---|
| petitBW,Hz | smallNRMS,mg | smallNPP,mg | petitBW,Hz | smallNRMSXY,mg | smallNPPXY,mg |
| 218,1 | 5.6 | 22 | 280 | 3.4 | 14 |
| 99 | 3.8 | 15 | 145 | 2.4 | 10 |
| 44,8 | 2,5 | 10 | 80 | 1,8 | 7 |
| 21,2 | 1,7 | 7 | 40 | 1,3 | 5 |
| 10.2 | 1.2 | 4.9 | 20 | 0,9 | 4 |
| 5,05 | 0,9 | 3.4 | 10 | 0,6 | 2.6 |
| 420 | 7.8 | 31 | 5 | 0,5 | 1,8 |
| 1046 | 12,3 | 49 | | | |
Delay (ms), ou d'où vient le retard
En raison de la nécessité de stocker des variables dans le tampon interne pour diviser le signal par le filtre à différentes fréquences
Total Plus la fréquence de coupure du filtre est faible, moins il y a de bruit dans le signal. Mais ici, il faut être prudent, car en même temps le retard augmente. De plus, vous pouvez ignorer le signal utile [8].
| MPU-9250 | BMI088 |
|---|
| Gyroscope, 16 bits |
|---|
| Gamme (FS) circ/s (dps) | Résolution, bit (BW = 92Hz) | Gamme (FS) circ/s (dps) | Résolution, bit (BW = 64Hz) |
| | pm125 | 8 |
| pm250 | 9 | pm250 | 9 |
| pm500 | 10 | pm500 | 10 |
| pm1000 | 11 | pm1000 | 11 |
| pm2000 | 12 | pm2000 | 12 |
| Accéléromètre |
|---|
| Gamme (FS), g | Résolution, bit (NPP=32mg) | Gamme (FS), g | Résolution (X, Y), bit (NXPPY=14mg) |
| pm2 | 6 | pm3 | 8 |
| pm4 | 7 | pm6 | 9 |
| pm8 | 8 | pm12 | 10 |
| pm16 | 9 | pm24 | 11 |
Et ce ne sont que les paramètres les plus élémentaires.
D'où cela vient-il:
- Le document le plus agréable de Freescale Semiconductor est "Combien de bits sont suffisants?"
- [EE] - «Résolution vs précision vs sensibilité coupant la confusion»
- [Temps électronique] - «Capteurs de mouvement MEMS de STMicroelectronics: accéléromètres et gyroscopes»
- [LSB] - "Un bit ADC et DAC de moindre poids (LSB)"
- [Calcul des mesures] - «TechTip: précision, précision, résolution et sensibilité»
- [KIT] - «Accéléromètres d'appareils analogiques - Appareil et application»
- [Easyelectronics] - «Sigma-Delta ADC»
- [Radiolotsman] - «Magnétomètres: principe de fonctionnement, compensation des erreurs»
- [SO] - «Mesure du bruit»
- [Mide] - "Spécifications de l'accéléromètre: déchiffrer la fiche technique d'un accéléromètre"
- [CiberLeninka] - Filtre ADC Delta-Sigma
- [SciEd] - «Caractéristiques de la mise en œuvre du filtrage numérique avec un changement de fréquence d'échantillonnage»
- [MPU6050] - "Utilisation du DLPF du MPU6050"
- [MPU9250_DLPF] - Enquête sur le travail DLPF du bruit gyroscopique MPU9250
- Comprendre les spécifications de résolution du capteur
- Traitement numérique du signal Siemens
- Capteurs de mouvement MEMS de STMicroelectronics
- [TMWorld] - "Évaluation des unités de mesure inertielle"
- [Sklyar] - Sklyar B. Communication numérique. Fondements théoriques et application pratique.