Bonjour à tous!
La question du développement physique de leurs propres enfants est toujours d'actualité. Le fils cadet a eu trois ans, en plus de marcher, il voulait lui trouver des cours avec un parti pris sportif. Comme il s'intéresse à différents types de transports, le choix s'est naturellement porté sur le runbike. Et après avoir regardé les vidéos incendiaires, alors que les enfants plus âgés font des cascades sur des vélos de course, j'ai décidé d'enquêter sur le problème plus en détail. Armé d'un IMU d'Amperka à 10 degrés de liberté, Raspberry Zero W avec une alimentation et 40 lignes de code en Python, je suis allé dans une école de course. Qu'est-il arrivé - regardez sous la coupe)

Les vélos de course ne sont pas aussi répandus que les vélos pour enfants ou les scooters, mais ils présentent plusieurs avantages par rapport aux autres modes de transport. L'enfant peut s'asseoir sur la selle, comme sur un vélo et pousser alternativement avec deux jambes. Cela donne une charge plus uniforme sur les deux jambes et le dos. Contrairement à un scooter, où une seule jambe de poussée fonctionne. Un bonus supplémentaire est que l'enfant apprend à équilibrer. Autrement dit, un transfert supplémentaire vers un vélo à deux roues est censé se produire sans aucune complication.
Fondamentalement, les conceptions des vélos de course sont assez simples. Il s'agit d'un cadre métallique (aluminium ou acier), d'un volant, d'une selle et de deux roues (gonflés pour des modèles plus chers ou en caoutchouc mousse). Il existe quelques modèles avec une suspension de roue arrière.

L'amortissement de la roue arrière m'a paru un détail particulièrement important. Un enfant sur un runbike sautera inévitablement des bordures et roulera sur des routes accidentées (nous vivons en Russie). Par conséquent, la présence d'un amortisseur devrait en théorie réduire la charge sur le dos. À l'avenir, à mesure que le professionnalisme du jeune cavalier se développera, l'amortisseur vous permettra également de faire des
sauts et autres trucs similaires .
Après avoir fouillé sur Internet, j'ai découvert que personne n'avait quantifié auparavant les charges qui tombent sur le cadre du vélo lors du saut d'obstacles divers. L'intérêt pour cette question et un peu de temps libre ont conduit au fait que j'ai rassemblé des matériaux à la main un simple banc d'essai.
Les accélérations seront mesurées avec un accéléromètre à trois axes du
capteur IMU fabriqué par Amperka. Il n'est pas possible d'utiliser l'accéléromètre des téléphones portables pour mesurer les accélérations dues à la limite de mesure basse (+ -2G). La plage de mesure pour chacun des axes du module Amperka est de + -8G, espérons que cela suffira.
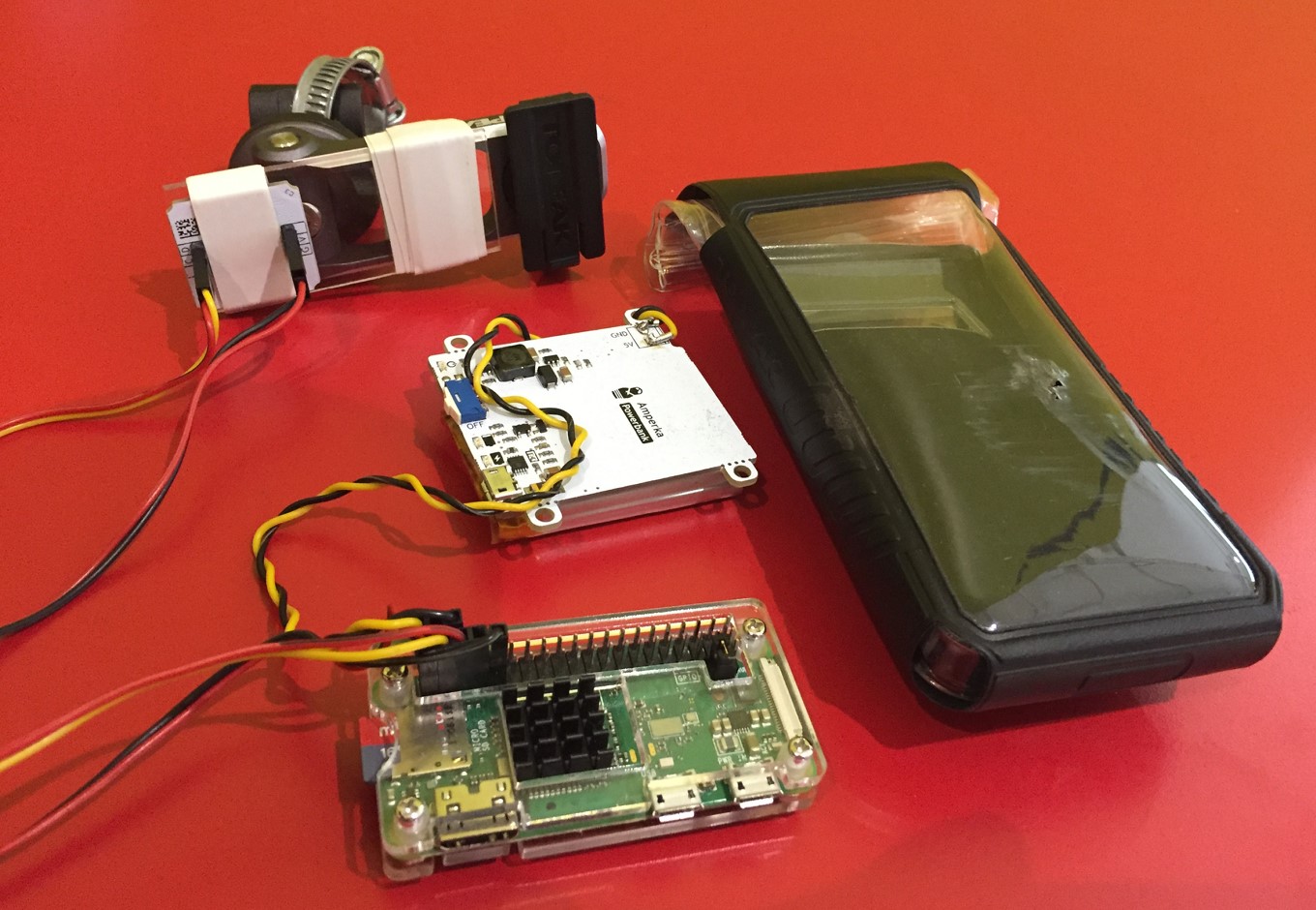
Le capteur IMU a été fixé au cadre à l'aide du support Topeak (j'ai dû le retirer temporairement de mon vélo), d'un morceau de plexiglas et de plusieurs couches de ruban électrique. Une seule carte Raspberry Pi Zero W a été utilisée pour interroger le capteur. Un petit script Python a interrogé l'accéléromètre avec une période d'environ 10 ms:
imu.pyimport time from pytroykaimu import TroykaIMU imu = TroykaIMU() imu.accelerometer.set_range('8G') file_name = '' print(' ( )') file_name = str(input ()) file_name = file_name + '.csv' print(' , Ctrl+C') t0 = time.time() imu_array = [] while True: try: ax, ay, az = imu.accelerometer.read_gxyz() gx, gy, gz = imu.gyroscope.read_radians_per_second_xyz() imu_array += [time.time(), ax, ay, az, gx, gy, gz] time.sleep(0.006) except KeyboardInterrupt: t1 = time.time() lines = int(len(imu_array)/7) print(" - -", lines, '- ', file_name) imu_file = open(file_name, 'w') imu_file.write('time,ax,ay,az,gx,gy,gz' + '\n') for i in range(lines): imu_file.write(str(imu_array[7*i]) + ',' + str(imu_array[7*i+1]) + ',' + str(imu_array[7*i+2]) + ',' + str(imu_array[7*i+3]) + ',' + str(imu_array[7*i+4]) + ',' + str(imu_array[7*i+5]) + ',' + str(imu_array[7*i+6]) + '\n') imu_file.close() print (' , -', t1 - t0, '') break
Power Raspberry a été retiré de
Power Bank du même Amperka , et j'ai démarré à distance à partir d'une cellule avec un terminal installé non sur lui. J'ai caché la carte unique avec une alimentation dans un étui pour téléphone portable et j'ai attaché le capteur IMU à la tige de selle des vélos de course étudiés comme suit:

Nous avons pris des mesures avec Evgeny Ivanov de l'
école BegovelMsk de Moscou . L'école de course pour le test a aimablement fourni deux vélos de course (
Puky LR Ride et
Early Rider Trail Runner 14 ). Ces deux modèles sont courants dans les écoles de course à pied, le premier - principalement pour les figures, le second - pour les vélos de course. Les pneus des deux modèles ont été gonflés à environ 3,5 atmosphères.
Le test a consisté en ce que le coureur Artyom a sauté d'un petit tremplin sur le runbike testé:

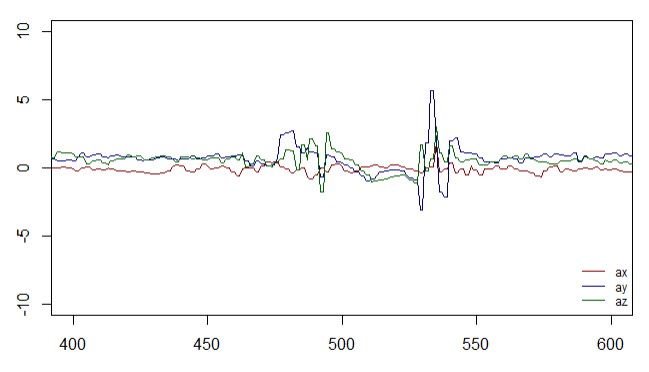
En conséquence, pour chaque saut sur la carte SD, Raspberry a réglé un fichier avec des sondages des trois axes de l'accéléromètre toutes les 10 ms. Un tel graphique peut être dérivé de chaque fichier; les accélérations en G sont tracées le long de l'axe vertical:
Les graphiques pour des sauts similaires se sont avérés assez similaires, mais les courbes d'accélération pour les deux modèles de runbikes étudiés sont très différentes. Pour simplifier l'image, seules les composantes verticales des accélérations sont tracées dans le graphique suivant (pour notre expérience, il s'agit de l'axe Y divisé par le cosinus de l'angle de déviation par rapport à la verticale). Le graphique montre également l'heure d'arrivée sur le tremplin (déterminée par la vidéo des courses) et l'heure de toucher le sol après le saut (c'est le signal maximum en amplitude).
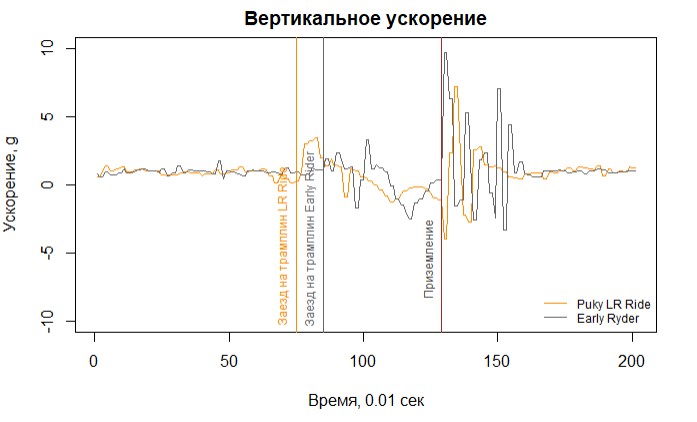
Comme vous pouvez le voir, le cadre tourne (et avec lui l'enfant) lorsqu'il saute d'un tremplin, il subit une charge de choc à court terme allant jusqu'à 10G! De façon inattendue. Je pensais que la charge était beaucoup plus faible. On peut conclure qu'il ne vaut pas la peine de descendre le trottoir en étant assis comme le 5ème point sur la selle. Sinon, le coup tombera sur la colonne vertébrale et les organes internes de l'enfant. Il serait optimal de transférer cette charge sur les jambes. Par conséquent, pour le modèle Puky LR Ride, une
étape spéciale est disponible, sur laquelle l'enfant devient des pieds lors de l'exécution de figures.

Quelles autres conclusions peut-on tirer de ces courbes? En gros, ce qui suit:
- L'amortisseur du LR Ride réduit la charge de choc sur le cadre du coureur d'environ 30% (probablement encore plus, car l'accéléromètre sature sur le cadre rigide du Trail Runner 14). De plus, la nature de l'augmentation de la charge change, elle devient plus lisse qu'un modèle sans amortisseur.
- L'amortisseur aide à augmenter la distance du saut, car l'enfant peut l'utiliser comme une sorte de ressort devant le plongeoir (attention à la courbe orange avant d'entrer dans le plongeoir).
- L'amortisseur amortit les vibrations résiduelles du cadre du runbike, il peut être remplacé qu'après le saut, le LR Ride est beaucoup plus petit que le Trail Runner 14, à la fois en temps et en amplitude. Cela améliore la maniabilité du runbike et le confort du pilote.
Ces résultats étonnamment intéressants ont été obtenus à partir d'une expérience simple. Au final, j'exprime à nouveau ma gratitude à l'école de course à pied, au coureur Artyom et à l'entraîneur
Evgeny Ivanov .

Merci d'avoir lu jusqu'au bout et à bientôt!