Si vous avez ouvert cet article, vous avez probablement déjà entendu parler des quaternions, et peut-être même les utilisez-vous dans vos créations. Mais il est temps de s'élever à un niveau supérieur - jusqu'aux biquaternions.
Cet article donne des concepts de base sur les biquaternions et les opérations avec eux. Pour une meilleure compréhension de l'utilisation des biquaternions, un exemple clair en Javascript utilisant Canvas est montré.
Biquaternion
Le biquaternion est un nombre hypercomplexe ayant une dimension de 8. Dans les articles et la littérature de langue anglaise, ils sont appelés «dual quaternion», et dans la littérature de langue russe, il existe également les noms de «dual quaternion» ou «complex quaternion».
La principale différence avec les quaternions est que le quaternion décrit l'orientation de l'objet dans l'espace, et le biquaternion décrit également la position de l'objet dans l'espace.
Le biquaternion peut être représenté par deux quaternions:
w i d e t i l d e t e x t b f q = b e g i n b m a t r i x t e x t b f q 1 t e x t b f q 2 e n d b m a t r i x ,
t e x t b f q 1 - la partie réelle, détermine l'orientation de l'objet dans l'espace;
textbfq2 - la partie double, détermine la position de l'objet dans l'espace.
Le biquaternion est également appelé le quaternion complexe, dans ce cas, il est représenté comme un quaternion, dont chaque composant est un nombre double (à ne pas confondre avec le complexe). Numéro double
A=a1+ epsilona2 où
a1 et
a2 Sont des nombres réels, et
epsilon - Symbole Clifford (complexité), possédant la propriété
epsilon2=0 . Nous ne nous attarderons pas sur les mathématiques, car nous nous intéressons davantage à la partie appliquée, par conséquent, nous considérerons le biquaternion comme deux quaternions.
Interprétation géométrique du biquaternion
Par analogie avec le quaternion, avec lequel vous pouvez définir l'orientation de l'objet, le biquaternion peut également définir la position. C'est-à-dire Le biquaternion définit deux valeurs à la fois - la position et l'orientation de l'objet dans l'espace. Si nous les considérons dans la dynamique, alors le biquaternion définit deux quantités - la vitesse linéaire de mouvement et la vitesse angulaire de rotation de l'objet. La figure ci-dessous montre la signification géométrique du biquaternion.
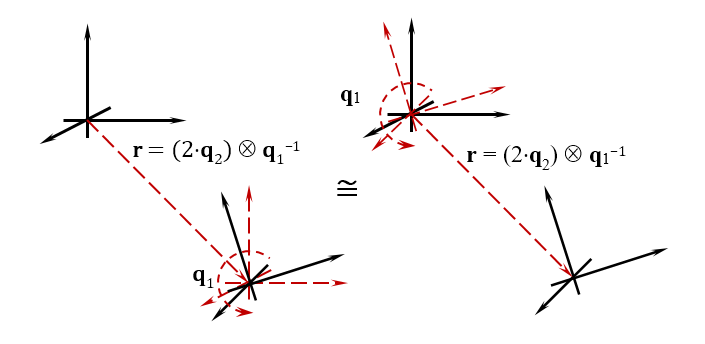
Les développeurs de jeux savent que pour déterminer la position et l'orientation d'un objet dans l'espace de jeu, des matrices de rotation et des matrices de déplacement sont utilisées et, selon l'ordre dans lequel vous les appliquez, le résultat de la position finale de l'objet est différent. Pour ceux qui sont habitués à diviser le mouvement en opérations distinctes, acceptez la règle pour travailler avec des biquaternions: d'abord nous déplaçons l'objet, puis nous le faisons pivoter. En fait, vous décrivez ces deux mouvements avec un seul numéro, bien qu'il s'agisse d'un hypercomplexe complexe.
Caractéristiques scalaires
Considérez les principales caractéristiques scalaires. Ici, il faut faire attention au fait qu'ils ne renvoient pas des nombres réels ordinaires, mais des nombres doubles.
1. La norme du biquaternion
| widetilde textbfq |= | textbfq1 |+ epsilon(q10q20+ textbfqT1 textbfq2)
2. Module Biquaternion
| widetilde textbfq|=| textbfq1|+ epsilon fracq10q20+ textbfqT1 textbfq2| textbfq1|
Opérations de base
Considérez les opérations de base de l'utilisation des biquaternions. Comme vous pouvez le voir, ils sont très similaires à des opérations similaires avec des quaternions.
1. Jumelage biquaternion
widetilde textbfq∗= beginbmatrix textbfq∗1 textbfq∗2 endbmatrix
2. Addition et soustraction de biquaternions
widetilde textbfq pm widetilde textbfp= beginbmatrix textbfq1 pm textbfp1 textbfq2 pm textbfp2 endbmatrix
L'addition et la soustraction de biquaternions sont commutatives (les termes peuvent être échangés).
3. Multiplication du nombre réel par biquaternion
a widetilde textbfq= widetilde textbfqa= beginbmatrixa textbfq1a textbfq2 endbmatrix
4. Multiplication du biquaternion
widetilde textbfq otimes widetilde textbfp= beginbmatrix textbfq1 otimes textbfp1 textbfq1 otimes textbfp2+ textbfq2 otimes textbfp1 endbmatrix
La multiplication des biquaternions n'est pas commutative (avec un changement dans l'ordre des facteurs, le résultat de la multiplication des biquaternions est différent).
Cette opération est l'une des principales lorsque vous travaillez avec des biquaternions et a une signification physique, à savoir que le résultat de la multiplication des biquaternions est l'opération consistant à ajouter les rotations et les mouvements linéaires de deux biquaternions.5. Biquaternion inversé
widetilde textbfq−1= frac widetilde textbfq∗ | widetilde textbfq |
Détermination du biquaternion par les angles d'orientation et le vecteur de position
Tout d'abord, nous définissons les systèmes de coordonnées dans lesquels nous considérerons l'orientation et la position de l'objet dans l'espace. Cela doit être fait pour spécifier la partie réelle du biquaternion (quaternion d'orientation), dont la séquence de rotation affecte le quaternion résultant à partir des angles d'orientation. Ici, nous serons guidés par les angles de l'avion - lacet
psi pas
vartheta et rouler
gamma .
Définissez le système de coordonnées de base. Imaginez que vous vous tenez à la surface de la Terre et que vous regardez en direction du Nord.
Point
O o - l'origine du système de coordonnées, situé au point d'origine de l'objet.
L'axe
O o Y g - est dirigé verticalement vers le haut et est opposé à la direction du vecteur de gravité.
L'axe
O o X g - est dirigé vers le nord, le long de la tangente du méridien local.
L'axe
O o Z g - complète le système vers la droite et est dirigé vers la droite, vers l'est.
Le deuxième système de coordonnées est connecté. Imaginez, par exemple, un avion ou un autre objet.
Point
O - l'origine du système de coordonnées, en règle générale, est située au centre de masse de l'objet.
Axe
OY - dirigé verticalement vers le haut et perpendiculaire au plan horizontal de l'objet.
Axis
OX - dirigé vers l'avant jusqu'au point avant de l'objet.
Axe
OZ - complète le système vers la droite.
La position de l'objet dans l'espace est déterminée par le vecteur rayon de l'origine (point
O ) du système de coordonnées associé par rapport au système de coordonnées de base fixe. L'orientation du système de coordonnées associé par rapport à la base est déterminée par trois allumages successifs:
angle de lacet
psi - rotation autour de l'axe
OY ,
angle de tangage
vartheta - rotation autour de l'axe
OZ ,
angle de roulis
gamma - rotation autour de l'axe
OX .
Pour la détermination initiale du biquaternion, vous devez spécifier les parties réelle et double du biquaternion. L'orientation et la position de l'objet sont définies par rapport à un certain système de coordonnées de base en utilisant des angles d'orientation
psi, vartheta, gamma et vecteur de position du centre de masse
r=(rx,ry,rz)T .
La vraie partie
textbfq1 peut être défini à l'aide de la formule:
\ textbf {q} _1 = \ begin {bmatrix} \ cos \ frac {\ psi} {2} \ cos \ frac {\ vartheta} {2} \ cos \ frac {\ gamma} {2} & - & \ sin \ frac {\ psi} {2} \ sin \ frac {\ vartheta} {2} \ sin \ frac {\ gamma} {2} \\ \ cos \ frac {\ psi} {2} \ cos \ frac { \ vartheta} {2} \ sin \ frac {\ gamma} {2} & + & \ sin \ frac {\ psi} {2} \ sin \ frac {\ vartheta} {2} \ cos \ frac {\ gamma} {2} \\ \ cos \ frac {\ psi} {2} \ sin \ frac {\ vartheta} {2} \ sin \ frac {\ gamma} {2} & + & \ sin \ frac {\ psi} { 2} \ cos \ frac {\ vartheta} {2} \ cos \ frac {\ gamma} {2} \\ \ cos \ frac {\ psi} {2} \ sin \ frac {\ vartheta} {2} \ cos \ frac {\ gamma} {2} & - & \ sin \ frac {\ psi} {2} \ cos \ frac {\ vartheta} {2} \ sin \ frac {\ gamma} {2} \ end {bmatrix}
Veuillez noter que si vous avez une séquence de rotation différente, les expressions seront également différentes.
Double partie
textbfq2 défini par l'expression:
textbfq2= frac12 textbfr otimes textbfq1
Calcul des angles d'orientation et du vecteur de position à partir du biquaternion. Transformation inverse
Les angles d'orientation peuvent être calculés à partir de la partie réelle du biquaternion
textbfq1 :
psi= arctan frac2(q0q2−q1q3)q20+q21−q22−q23
vartheta= arcsin(2(q1q2+q0q3))
gamma= arctan frac2(q0q1−q2q3)q20−q21+q22−q23
La position de l'objet est déterminée par l'expression:
textbfr=2 textbfq2 otimes textbfq−11
le résultat est un vecteur sous forme de quaternion
textbfr=(0,rx,ry,rz)TFaire pivoter et déplacer le vecteur biquaternion
L'une des grandes propriétés des biquaternions est la rotation et le mouvement d'un vecteur d'un système de coordonnées à un autre. Soit
O o X g Y g Z g un système de coordonnées de base fixe, et
OXYZ le système de coordonnées connecté de l'objet. Ensuite, l'orientation et la position de l'objet par rapport au système de coordonnées de base peuvent être spécifiées par le biquaternion
widetilde textbfq . Si un vecteur est spécifié
textbfr dans un système de coordonnées connecté, vous pouvez obtenir un vecteur
textbfr0 dans le système de coordonnées de base en utilisant la formule:
textbfr0= widetilde textbfq otimes textbfr otimes widetilde textbfq−1
et retour:
textbfr= widetilde textbfq−1 otimes textbfr0 otimes widetilde textbfq
où
textbfr Est un vecteur sous forme de biquaternion,
textbfr=(1,0,0,0,0,0,rx,ry,rz)Bibliothèque JavaScript Biquaternion
Toutes les opérations ci-dessus avec biquaternions sont implémentées dans la bibliothèque javascript, en fonction de vos tâches, elles peuvent être implémentées dans d'autres langages de programmation. Les principales fonctions du travail avec les biquaternions:
| Fonction | La description |
|---|
DualQuaternion.dq | Corps biquaternion sous forme de tableau de 8 nombres |
DualQuaternion(dq0, dq1, dq2, dq3, dq4, dq5, dq6, dq7) | Un constructeur qui définit un biquaternion en spécifiant les huit nombres |
DualQuaternion.fromEulerVector(psi, theta, gamma, v) | Obtenez le biquaternion en définissant l'orientation de l'objet avec des angles d'Euler et le vecteur de position de l'objet |
DualQuaternion.getEulerVector() | Obtenez les angles d'Euler et le vecteur de position à partir du biquaternion |
DualQuaternion.getVector() | Obtenez le vecteur de position de biquaternion |
DualQuaternion.getReal() | Obtenez la partie réelle du biquaternion (détermine l'orientation de l'objet dans l'espace) |
DualQuaternion.getDual() | Obtenez la double partie du biquaternion (détermine la position de l'objet dans l'espace) |
DualQuaternion.norm() | Obtenez la norme biquaternion sous la forme d'un nombre double |
DualQuaternion.mod() | Obtenez le module biquaternion en tant que numéro double |
DualQuaternion.conjugate() | Obtenez le biquaternion conjugué |
DualQuaternion.inverse() | Obtenez Biquaternion inversé |
DualQuaternion.mul(DQ2) | Multiplication de biquaternions |
DualQuaternion.toString() | Convertir biquaternion en chaîne, par exemple, pour la sortie vers la console de débogage |
Fichier dual_quaternion.js Un exemple de travail avec des biquaternions
Pour une meilleure compréhension des bases de l'utilisation des biquaternions comme exemple, considérons un petit jeu. La zone rectangulaire est définie - la carte. Un navire flottant sur une carte avec un pistolet rotatif monté sur la carte. Ici, il faut tenir compte du fait que pour le navire, le système de coordonnées de base est le système de coordonnées de la carte, et pour le canon, le système de coordonnées de base est le navire. Tous les objets sont dessinés dans le système de coordonnées de la carte et ici, il sera intéressant de voir comment vous pouvez passer du système de coordonnées du pistolet au système de coordonnées de la carte en utilisant la propriété de multiplication biquaternion. Le mouvement du navire est contrôlé par les touches W, A, S, D. La direction du pistolet est définie par le curseur de la souris.

Le navire et le canon sont décrits par deux classes: le navire et le canon. Dans le constructeur de la classe de navire, sa forme sous la forme de points de biquaternion, l'orientation et la position initiales sur la carte sous la forme de
this.dq_pos biquaternion de
this.dq_pos sont
this.dq_pos .
Des incréments de biquaternion sont également donnés pour le contrôle des navires. Lorsque vous vous déplacez d'avant en arrière (touches W, S), seule la partie double du biquaternion change et lorsque vous contrôlez de droite à gauche (touches A, D), la partie réelle et double du biquaternion change, ce qui définit l'angle de rotation.
function Ship(ctx, v) { this.ctx = ctx; this.dq_pos = new DualQuaternion.fromEulerVector(0*Math.PI/180, 0, 0, v);
Dans la classe elle-même, il n'y a qu'une seule fonction pour rendre le
Ship.draw() . Faites attention à l'application de l'opération biquaternion consistant à multiplier chaque point du navire par le biquaternion de la position et de l'orientation actuelles du navire.
Ship.prototype = { 'ctx': 0, 'dq_pos': new DualQuaternion.fromEulerVector(0, 0, 0, 0, 0, 0), 'draw': function() {
Dans le constructeur de la classe des armes à feu, sa forme sous la forme de points biquaternion est spécifiée. Le pistolet sera affiché sous forme de ligne. L'orientation et la position initiales sur le navire sont définies par le biquaternion
this.dq_pos . En outre, la liaison avec le navire sur lequel il est installé est également définie. Le pistolet sur le navire ne peut que tourner, donc les incréments de biquaternion lors du contrôle du pistolet ne changeront que la partie réelle du biquaternion, qui définit l'angle de rotation. Dans cet exemple, l'outil est guidé par le curseur de la souris, de sorte que la rotation du pistolet se produira instantanément.
function Gun(ctx, ship, v) { this.ctx = ctx; this.ship = ship;
Dans la classe gun, une seule fonction de son rendu
Ship.draw() également implémentée. Le pistolet est affiché sous la forme d'une ligne définie par deux points
this.dq_backward et
this.dq_forward . Pour déterminer les coordonnées des points de canon, l'opération de multiplication biquaternion est utilisée.
Gun.prototype = { 'ctx': 0, 'ship': 0, 'dq_pos': new DualQuaternion.fromEulerVector(0, 0, 0, [0, 0, 0]), 'draw': function() {
Le traitement du contrôle des navires et des armes à feu est mis en œuvre au moyen d'événements. Quatre variables
leftPressed, upPressed, rightPressed, downPressed , qui sont traitées dans la boucle de programme principale, sont chargées d'appuyer et de relâcher les touches de commande du navire.
leftPressed = false; rightPressed = false; upPressed = false; downPressed = false; dq_mouse_pos = new DualQuaternion.fromEulerVector(0, 0, 0, [0, 0, 0]); document.addEventListener("keydown", keyDownHandler, false); document.addEventListener("keyup", keyUpHandler, false); document.addEventListener("mousemove", mouseMoveHandler, false);
L'une des fonctions les plus intéressantes, du point de vue de l'utilisation des opérations de biquaternion, est de contrôler le canon du navire dans la direction du pointeur de la souris. Tout d'abord, les coordonnées du pointeur de la souris sont déterminées dans le biquaternion
dq_mouse_pos . Ensuite, le biquaternion de la position de la souris par rapport au navire est calculé en utilisant la multiplication du biquaternion. Le biquaternion du navire provient de la souris biquaternion
dq_mouse_pos_about_ship = ship_1.dq_pos.inverse().mul(dq_mouse_pos);(Remarque: les opérations de multiplication biquaternion séquentielles se lisent de droite à gauche). Et enfin, l'angle entre les vecteurs de l'outil et de la souris est déterminé. Le point de départ du pistolet
gun_1.dq_backward reçoit la valeur reçue.
function mouseMoveHandler(e) { var relativeX = e.clientX - canvas.offsetLeft; var relativeY = e.clientY - canvas.offsetTop;
Dans le corps principal du programme, les objets du navire et des canons
ship_1 et
gun_1 , les informations de débogage sont affichées et le traitement de contrôle du navire est effectué.
var canvas = document.getElementById("myCanvas"); var ctx = canvas.getContext("2d"); ship_1 = new Ship(ctx, [100, 0, 100]); gun_1 = new Gun(ctx, ship_1, [0, 0, 0]); function draw() { ctx.clearRect(0, 0, canvas.width, canvas.height); ship_1.draw(); gun_1.draw();
Le lien vers l'archive contient le code complet des bibliothèques pour travailler avec les quaternions et les biquaternions, le script du programme lui-même et le fichier index.html, qui peut être ouvert localement dans le navigateur afin d'exécuter l'exemple ci-dessus.
Un exemple de travail avec des biquaternionsConclusion
Vous vous posez peut-être une question: pourquoi utiliser un appareil mathématique aussi complexe alors que vous pouvez vous en tirer avec des outils standard pour déplacer et faire tourner des objets? L'un des principaux avantages est que la forme d'écriture biquaternion est plus efficace en termes de calcul, car toutes les opérations avec des biquaternions après le développement des expressions sont linéaires. Cette vidéo,
Skinning géométrique avec mélange approximatif de quaternions doubles, montre à quel point les calculs de biquaternions sont plus efficaces que les autres méthodes.
J'ai principalement pris des informations sur l'utilisation des biquaternions de sources anglaises.
De la littérature domestique, je peux conseiller deux livres:
- Chelnokov Yuri Nikolaevich. Modèles quaternion et biquaternion et méthodes de la mécanique des solides et leurs applications. Géométrie et cinématique du mouvement. - travail théorique monumental.
- Gordeev Vadim Nikolaevich. Quaternions et biquaternions avec des applications en géométrie et en mécanique. - Il est écrit dans un langage plus compréhensible et montre des applications dans les tâches de mise en forme de structures spatiales courbes.