
Drones, hélicoptères télécommandés, logiciels espions et multicoptères militaires - tous ces appareils volants font depuis longtemps partie de la vie quotidienne. Aujourd'hui, vous ne pouvez surprendre personne avec une machine volante électrique sans ailes. Le voici, accroché dans le ciel à ses petits ventilateurs, sans ailes et uniquement grâce à l'électricité!
Cependant, jusqu'à récemment, les voitures à décollage vertical et à traction électrique n'étaient qu'un rêve inaccessible. Comment cela est-il devenu possible et pourquoi personne ne les a fait auparavant? Qui a été le premier à lever l'hélicoptère électrique en l'air? Voyons l'histoire de l'apparition dans notre ciel de bourdons multi-hélices.
Pré-requis pour l'émergence du décollage vertical électrique
Il y a quinze ans, dans le ciel des appareils volants compacts, seuls des avions et des hélicoptères équipés de moteurs à combustion interne pouvaient être observés.
Et partout dans le monde, et en URSS, les avions étaient invariablement la base de la modélisation des avions. Il s'agissait de modèles sans fil, non contrôlés et radiocommandés. Il n'y avait que des rumeurs sur les modèles d'hélicoptères, quelqu'un se vantait d'avoir vu un tel vol, mais ils ne les croyaient pas, et personne ne voyait vraiment les hélicoptères radiocommandés dans leurs yeux.
Concours d'hélicoptères radiocommandés de 1982 en URSSPour les modèles d'avions dont les moteurs d'avions ne fonctionnaient pas au carburant, mais à l'électricité, la situation était meilleure, mais pour la construction d'hélicoptères, les moteurs électriques depuis plus de cent cinquante ans, dès le moment de leur apparition, étaient absolument inadaptés. Les hélicoptères dans la vidéo de 1982 ont également des moteurs à combustion interne, et ils étaient tous entièrement faits maison.
L'industrie du modèle d'hélicoptère n'existait tout simplement pas, donc tout ce à partir duquel les hélicoptères ont été fabriqués sur vidéo a été sélectionné avec grande difficulté à partir d'autres modèles et appareils électriques, il a été scié, usiné et collé ensemble manuellement.
Cependant, le temps ne s'arrête pas, et deux choses nécessaires pour lever la traction électrique sont progressivement apparues. Tout d'abord, des moteurs électriques de petite taille, sans balais ou à soupape, sont apparus (
https://ru.wikipedia.org/wiki/Ventilny_engine ).
Le fait est qu'avant leur apparition, aucun moteur électrique ne fournissait une puissance suffisante pour soulever le poids souhaité avec un poids mort acceptable. Par conséquent, les moteurs électriques pouvaient être utilisés dans les voitures, les tramways et le métro, avec leur aide, il était possible de raser, de broyer les aliments et de pomper l'eau. Vous pouvez même créer et ajouter des ailes en les plaçant dans un avion. Cependant, les premiers moteurs électriques des avions ont certainement perdu à tous égards le moteur à combustion interne. L'avènement des moteurs électriques modernes de petite taille a été favorisé par l'invention d'aimants robustes. Certes, tous les moteurs électriques de la nouvelle génération n'étaient pas initialement destinés à l'aviation, nous allons maintenant en parler.
Pêcheur en hélicoptère, modèle ICE 2010Et deuxièmement, des batteries compactes et volumineuses sont apparues, ce qui a très probablement contribué de manière significative au développement de l'électronique mobile. Par exemple, des batteries lithium-polymère et lithium-ion ont commencé à être produites, qui ont remplacé le nickel-cadmium et le nickel-hydrure métallique.
Les toutes premières batteries n'étaient pas légères et compactes, et il n'était pratiquement pas possible de les soulever en l'air. Au début, ils ont essayé de les utiliser dans les voitures, mais un moteur à combustion interne est apparu et à ce moment-là a rapidement mis fin au développement des véhicules électriques. Les batteries lithium-polymère modernes ont permis d'obtenir une capacité spécifique plus élevée.
Premières crêpes
Les premières tentatives de création de modèles électriques commerciaux ont été Kalt Whisper et Kyosho EP Concept. Les concepteurs de certains fabricants d'appareils de loisir ont réussi à sélectionner le poids et d'autres caractéristiques des composants afin que ces premiers hélicoptères, toujours sur d'anciens moteurs collecteurs, puissent décoller. Kalt Whisper et Kyosho EP Concept ont commencé la production vers 1991. Un peu plus tard, les produits de la société allemande Icarus sous les noms ECO 8 et ECO 16 (1995) prennent leur envol. Le plus avancé était le modèle GWS Dragonfly, mais il est également apparu plus tard, vers 1998.
Cependant, les premiers modèles d'hélicoptères électriques avaient un tas de problèmes insolubles. Les moteurs électriques de faible puissance ne permettaient pas de gagner en vitesse de levage et de déplacement dans le plan horizontal. A partir de vieilles batteries lourdes nickel-cadmium avec 7-8 "banques" et une faible capacité spécifique, il a été possible de réaliser de 4 à 12 minutes de vol.
Kalt Whisper, 1991 Vidéo promotionnelleLe principal problème était le coût élevé des magasins et le prix exorbitant des réparations. Piloter ces modèles au moins d'une manière ou d'une autre n'est devenu possible qu'après plusieurs semaines d'entraînement intensif.
Puisqu'à cette époque, les systèmes de stabilisation efficaces étaient absents dans la nature et que tous les propriétaires n'étaient pas des maîtres de la voltige, les modèles se sont écrasés tous les deux vols. Des centaines de dollars ont été consacrés à l'achat de pièces de rechange. Le pilote de Kalt Whisper avec la vidéo ci-dessus est clairement un professionnel dans son domaine, pour cela c'est une publicité. En réalité, presque tout le monde qui mentionne sur Internet qu'il possédait un hélicoptère électrique à l'époque écrit qu'il se tenait là tout le temps sur une étagère ou dans un garage.
Prototypes de modèles modernes
Proxflyer
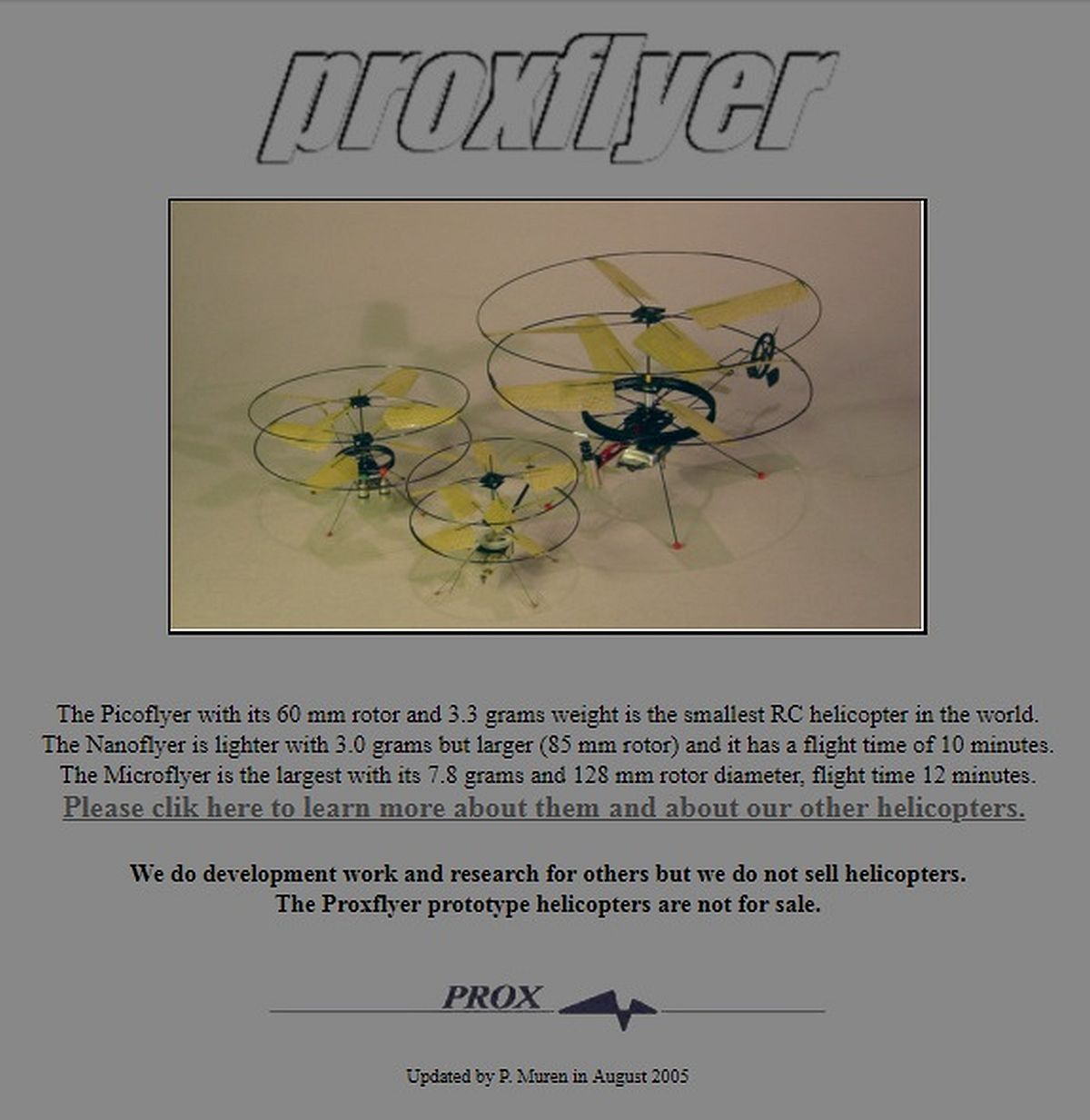
Le premier à combiner les réalisations des nouvelles technologies a été la supposition de l'ingénieur norvégien Peter Muren. Il a créé un site décrivant sa première invention en 2003 si Archive.org ne ment pas. Le site s'appelait Proxflyer.com (avec cette orthographe, par «Y») et contenait des photos et des vidéos de vols d'un appareil incroyable pour l'époque: un hélicoptère de la taille d'un paquet de cigarettes tout en étant contrôlé à distance.

Archive.org montre les premières versions du site créées en 2003 (
http://web.archive.org/web/20031001000000*/proxflyer.com ).
Pour faire voler le modèle dans les airs, Peter a utilisé le schéma de vol en hélicoptère le plus stable - coaxial (comme le Black Shark KA-50). Dans sa conception, il n'a pas utilisé de mini-plateaux oscillants inexistants et, en outre, des gyroscopes, facilitant ainsi le modèle.
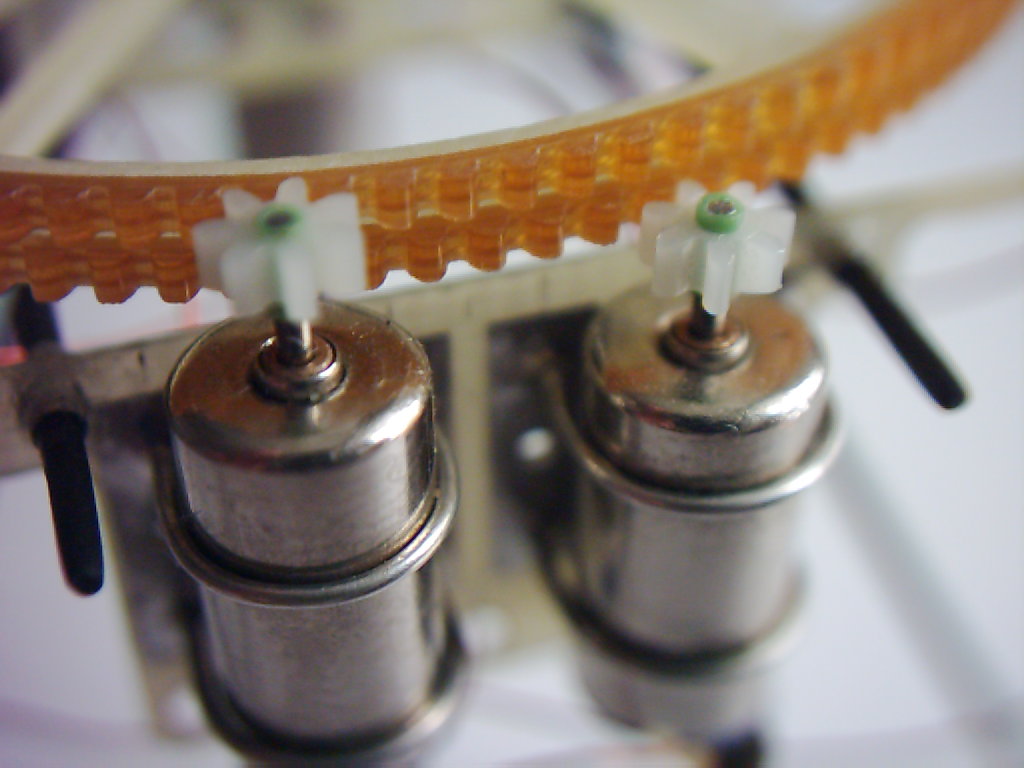
Peter Muren présente le premier modèle d'hélicoptère électrique au monde 2004Les entraînements des moteurs électriques étaient fabriqués sur des poulies et des courroies minces du type utilisé dans les courroies pour magnétophones à cassettes étaient utilisées comme courroies. Il n'y avait aucun engrenage dans ce schéma. Un moteur a tordu les deux vis, l'autre a tourné la queue.
Transmission sur Proxflyer, 2004N'oubliez pas que YouTube n'a été ouvert qu'en 2005, donc la vidéo a été téléchargée plus tard.
Peter a pu atteindre la masse souhaitée de l'appareil en utilisant de nouvelles batteries lithium-polymère dans son hélicoptère. Pour réduire le poids des pales et des parties du corps de l'hélicoptère ont été faites de bois de balsa. En tant que moteurs, il a utilisé ceux qui venaient d'apparaître et qui étaient initialement utilisés dans les appels vibrants des téléavertisseurs (qui ne savent pas ce qu'est un téléavertisseur, demandez à vos parents) et les téléphones portables. Ces moteurs électriques étaient appelés: Moteur de téléavertisseur (moteur d'un téléavertisseur):
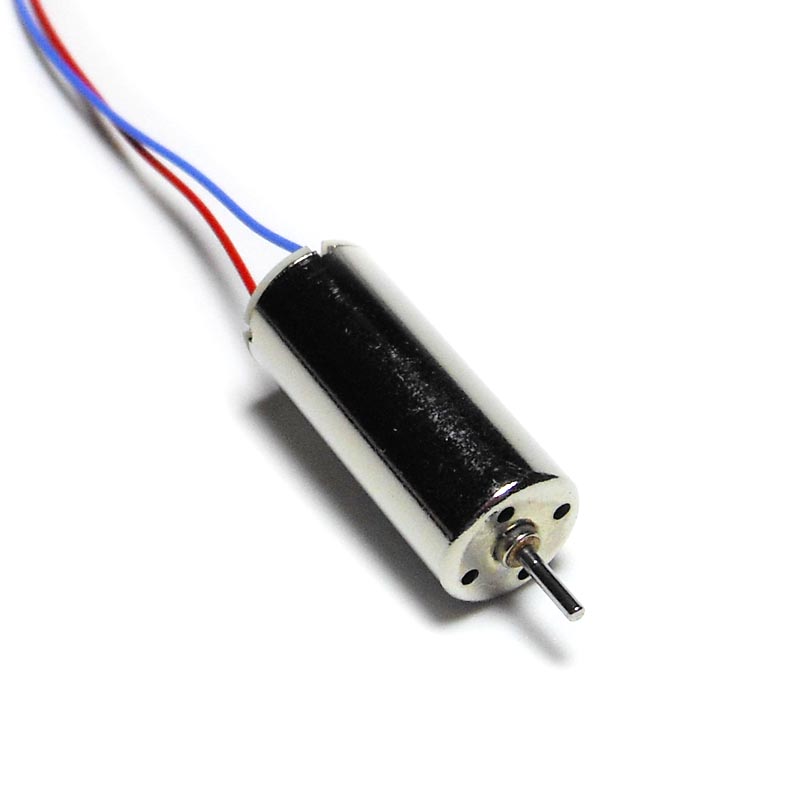
Par conséquent, les premiers micromoteurs n'étaient pas du tout conçus pour le décollage vertical.
Plus tard, Peter a construit d'autres modèles, où le changement de position de l'hélicoptère dans l'espace a été effectué en modifiant la vitesse de rotation de l'une des deux vis coaxiales, et ils ont été entraînés par des moteurs séparés. Au total, deux sont responsables de la hausse.
Le mouvement vers l'avant a été effectué grâce au troisième moteur électrique, monté non verticalement, comme dans les hélicoptères classiques ou comme dans le premier modèle, mais horizontalement et soulevant la queue du modèle.
L'ingénieur a réussi à trouver une telle combinaison de moteurs miniatures et légers avec d'autres pièces allégeant le poids, ce qui a finalement permis au modèle de planer au-dessus de la table.
Après avoir reçu un brevet pour son invention, Peter a commencé à améliorer ses modèles, et un peu plus tard, Interactive Toy Concepts a commencé à produire des hélicoptères jouets selon son schéma.
Nouveau modèle Proxflyer, vers 2004.Pixelito
Le deuxième schéma, qui est développé en parallèle, était un schéma avec une entrée verticale d'un modélisateur belge nommé Alexander. Il a nommé son hélicoptère Pixelito. Alexander a utilisé un schéma différent de Proxflyer, qui n'avait qu'un seul rotor principal.
La stabilité de son vol a été facilitée par un dispositif à vis spécial: faute de stabilisateurs électroniques de vol, d'un poids acceptable, un sommet massif a été placé sur la vis qui, lors de la rotation, a joué le rôle d'un gyroscope contrôlant l'angle d'attaque des pales.
En haut se trouve un équilibreur (flybar, barre Bell / Hiller):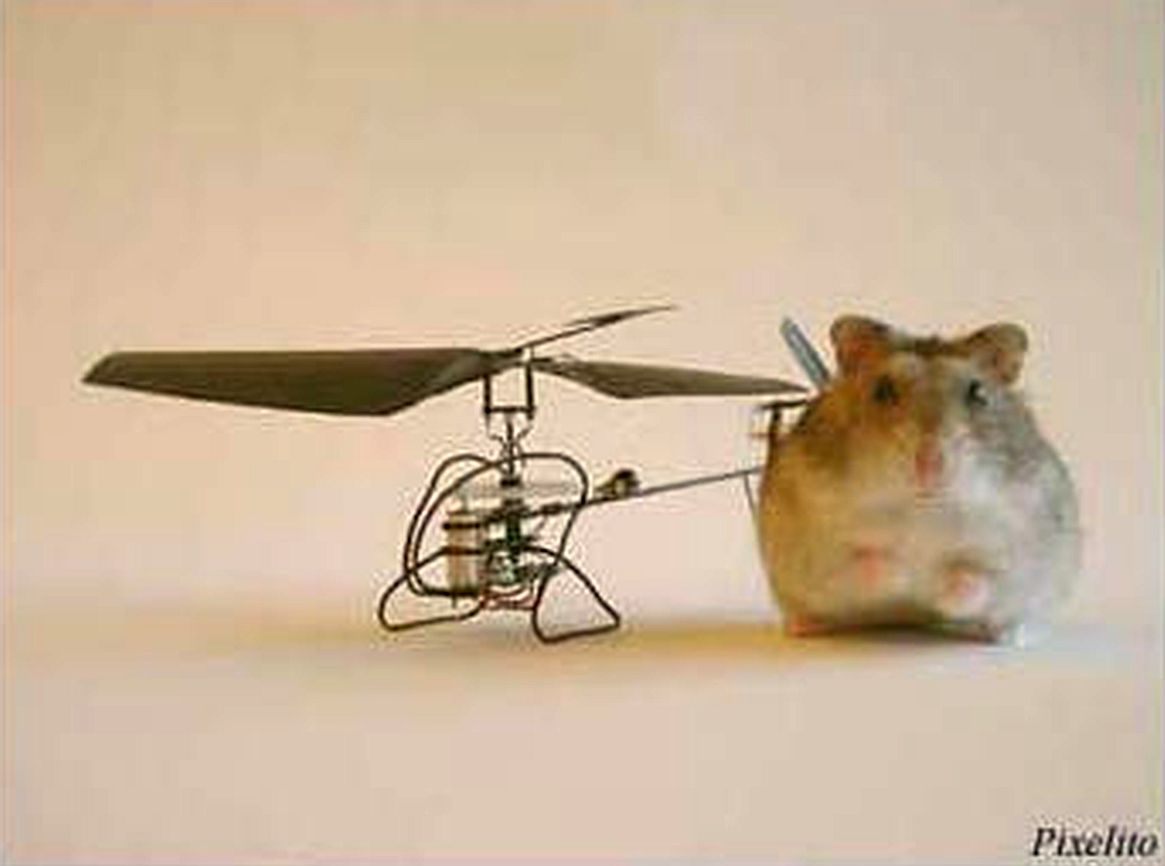
Peu importe comment les concepteurs ont essayé plus tard, sans cette chose, les hélicoptères avec une vis ont refusé de voler (jusqu'à l'apparition de stabilisateurs électroniques contrôlant l'angle d'attaque des pales - circuits d'hélicoptère sans barre de vol). Le premier schéma d'hélicoptère ne nécessitait pas d'équilibreur, ou peut-être que sa fonction était partiellement remplie par l'anneau restrictif sur les lames de bois de balsa.
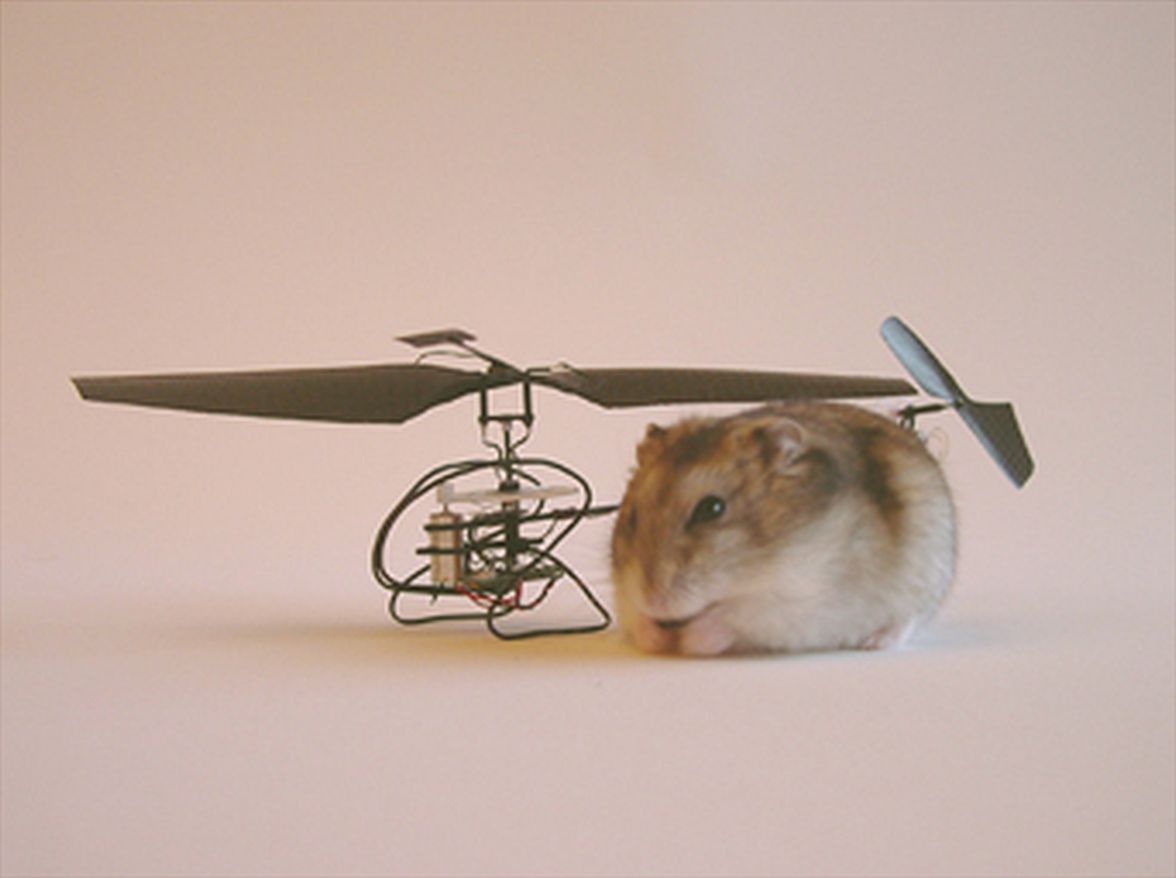
Il y avait aussi deux moteurs dans ce modèle: pour l'hélice principale, qui permettait de voler de haut en bas, et pour l'hélice stabilisatrice, avec laquelle il était possible de tourner. Le modèle s'est avéré incroyablement petit, ce qui peut être jugé par la photo avec le hamster, c'est 2003, donc désolé pour la qualité. Le modèle ne pesait que 6,9 grammes.
En 2003, Alexander était presque prêt à créer un modèle réalisable et a trouvé Peter, le créateur de Proxflyer. Ils ont décidé d'unir leurs forces et ont ainsi apporté leurs modèles à des prototypes fonctionnels.
Un dossier daté du 15 décembre 2003 dit:
«Aujourd'hui, Peter et moi sommes heureux de présenter le résultat de notre dernier développement conjoint. J'ai créé l'hélicoptère Pixelito, et Peter a créé le Proxflyer Micron
(à l'époque ce n'est pas le premier modèle norvégien - ma note) . Le Pixelito est un hélicoptère avec mon propre système de contrôle du rotor, et la conception de Peter est déjà assez bien connue. Nous les appelons des robots, car un tel nom les décrit le mieux. Il y a environ 2 semaines, Peter et moi avons passé un merveilleux week-end chez moi et après cela, j'ai décidé que ce serait bien de mener des recherches conjointes, chacune à la maison, mais en allant vers un objectif commun. Cela a abouti à la création d'un modèle ne pesant que 6,9 grammes avec la batterie, et nous savons tous les deux que ce n'est pas la limite.
Alexandre et Pierre
Une vidéo du mini-hélicoptère Pixelito nouvellement créé, mais dans la vidéo, il est contrôlé par un ami de son créateur, auteur du Proxflyer Peter Muren. Vous pouvez deviner qu'Alexander tient un appareil photo.
Pixelito 2003Le troisième prototype pourrait être le développement sensationnel en même temps de la société japonaise Seiko Epson. Le modèle ne pouvait que voler de haut en bas.

Malheureusement, après les toutes premières nouvelles de cet appareil miracle volant coaxial, des informations à ce sujet ont disparu, seul un article avec une description est resté:
https://www.ixbt.com/news/hard/index.shtml?02/35/48 .
Apparemment, le développement a échoué et n'a pas reçu de développement supplémentaire, en outre, il n'y avait pas de vidéos montrant son travail. La photo montre qu'un circuit a été utilisé, dans lequel les vis coaxiales ont été combinées avec l'équilibreur.
Développement d'hélicoptères électriques
Avec l'avènement des prototypes volants, d'autres fabricants de jouets ont également repris l'idée, et en utilisant de nouveaux moteurs, des batteries et en choisissant un plastique plus moderne et léger, ils ont commencé à produire des modèles d'hélicoptères les uns après les autres, d'abord selon le schéma norvégien, puis, similaire à Pixelito, à mon avis , les premiers modèles de production s'appelaient Pixelito.
Un hélicoptère est l'un des premiers modèles selon un schéma similaire à Proxflyer, Syma, 2007Également l'un des premiers modèles de la société anglaise Fastek Computers, 2007Au début, les hélicoptères étaient pour la plupart coaxiaux. L'un des fabricants d'hélicoptères radiocommandés les plus prolifiques de l'époque était la société chinoise Syma. Les modélistes d'avions de tous les pays ont également essayé avec toutes leurs versions différentes de modèles de construction à décollage vertical, et certaines de leurs réalisations étaient tout à fait exceptionnelles, mais ce qui a le plus rapidement atteint le consommateur final, ce sont les produits des fabricants de jouets.
L'un des premiers modèles Pixelito, 2 canaux, uniquement avec équilibreur, 2008En conséquence, les modélistes norvégiens et belges ont gagné de l'argent en vendant les droits de fabrication d'hélicoptères télécommandés fabriqués selon leurs plans.
Par la suite, la DARPA et le ministère norvégien de la Défense se sont intéressés au développement de Peter, l'ingénieur a créé sa propre société Prox Dynamics et a commencé à développer un hélicoptère espion à des fins militaires.

Ce qui se passe là-bas et à quel stade de la production est inconnu.
Améliorations et amélioration de la stabilisation du vol
Alors que les premiers hélicoptères jouets n'avaient que 2 canaux de contrôle (en avant et en virage dans un seul sens), les amateurs se sont fait des modèles sur radiocommande multicanaux. Pour contrôler les tout premiers modèles d'hélicoptères télécommandés, une formation assez longue était nécessaire, car il était assez difficile de le garder en l'air, et beaucoup dépendait de l'habileté du pilote.
Pour les hélicoptères jouets les plus simples, au lieu de la radiocommande, une commande de rayonnement infrarouge a été utilisée. Dans les modèles plus avancés - over the air. Dans les modèles bon marché, c'était à deux canaux, plus cher, plus il y avait de canaux de contrôle.
Dans les modèles les moins chers, un troisième canal a été ajouté pour remplacer le contrôle à deux canaux, et le contrôle est devenu plus comme un vol à part entière. Restez en l'air, malgré les nombreuses chaînes, ce n'était toujours pas facile.
Notez à quel point il est difficile pour le pilote de gérer le modèle en place:
L'un des premiers modèles d'hélicoptères, un circuit comme Pixelito, 2007.L'avènement des gyroscopes miniatures a considérablement amélioré cette situation. Après avoir ajouté cet appareil au modèle, le vol est devenu directement anormalement stable, il n'était pas nécessaire de garder constamment les doigts sur les touches de commande. Cependant, ces modèles coûtent beaucoup plus cher que les hélicoptères sans gyroscope. Les gyroscopes ont également été utilisés dans les modèles d'hélicoptères à moteur à combustion interne.
Vidéo sur les modèles d'hélicoptères avec gyroscopes, 2011Le modèle le plus populaire avec un gyroscope pour l'acheteur de masse était le modèle Syma S107, mais les hélicoptères d'hélicoptère les plus fiables, probablement résistants aux collisions directes avec les murs, les dents de chat et les béliers de meubles sans fin.
Après son apparition, de nouveaux dispositifs de stabilisation ont commencé à être mis sur les tout premiers modèles d'hélicoptères électriques. Les kits de mise à niveau Kalt Whisper, Kyosho EP Concept, Icarus ECO 8 et 16 et GWS Dragonfly sont apparus dans les magasins. Sur les mêmes hélicoptères, après avoir installé un gyroscope, des batteries lithium-polymère et des moteurs brushless légers et puissants, il est devenu possible non seulement de voler normalement, mais même de faire de la voltige. Cependant, encore une fois, leur valeur était exorbitante. Quelque part avant 2006, ils n'étaient pas non plus accessibles à tout le monde, et presque personne ne les avait achetés.
Démonstration des capacités d'un hélicoptère électrique avec un gyroscope, 2014. Votre quadricoptère peut-il faire cela?Dans le domaine militaire, le premier test de tirs d'un hélicoptère radiocommandé a commencé à être effectué par une certaine société Neural Robotics (encore une fois, rappelez-vous, attribuant des modèles volants contrôlés à distance à des robots) en 2006. Ils ont accroché un fusil de chasse sur un modèle d'hélicoptère et ont commencé à étudier son comportement pendant les tirs, ainsi que la façon dont le tir affecte le contrôle.
Shotgun Shot, 2006Leur hélicoptère possédait de l'ICE, et cette expérience est devenue significative - elle a poussé le développement de la direction des drones de choc. Désormais, les multicoptères militaires larguent des bombes au complet, espionnent et dirigent des missiles sur des cibles.
En cas de doute - mettez plus d'hélices!
Presque immédiatement après l'apparition des modèles d'hélicoptères, des tentatives ont commencé pour créer des machines à hélices multiples, pour ainsi dire.

Plus il y avait d'hélices dans le modèle, plus il était difficile de coordonner leur travail. Le même hélicoptère Chinook de la photo ci-dessus, sans gyroscope, était une saucisse pendant le vol, de sorte qu'il est devenu douteux d'utiliser deux paires de vis. Pour le vol de modèles à trois moteurs ou plus, l'électronique était nécessaire, un ordre de grandeur plus compliqué qu'un hélicoptère.
Au début, ils ont commencé à expérimenter le nombre de moteurs électriques. C'est désormais presque toujours mettre un signe égal entre le drone et le quadricoptère, mais à l'aube de leur apparition ce n'était pas du tout comme ça.
Initialement, les modèles multimoteurs étaient assemblés exclusivement par des passionnés. Presque immédiatement, l'idée est venue de mettre des caméras compactes sur le modèle, qui n'étaient pas nombreuses à l'époque, et GoPro est apparu plus tard, et a réussi à s'inscrire dans la tendance. Les caméras ont été assemblées à partir de contrôleurs soudés à des caméras à partir de téléphones portables, etc. Les concepteurs de plusieurs hélicoptères ont sélectionné des matériaux pour leurs cadres, expérimenté différents moteurs électriques, commencé à souder divers modules pour un contrôle coordonné des hélices, à écrire des logiciels pour cela et à échanger des trouvailles réussies. Cela s'est avéré avec un succès variable.
Bien qu'il n'y ait pas d'électronique fiable pour faire correspondre les moteurs et que les gyroscopes miniatures n'apparaissent pas, il était effrayant de regarder les vols de tels appareils. Il y avait des images cassées, des caméras vidéo perdues et des modules électroniques coûteux noyés dans des étangs. Cependant, d'année en année, la stabilité, la portée de vol, la facilité de gestion et la qualité des vidéos tournées étaient en constante augmentation.
Les hélicoptères sont apparus avec deux, trois, quatre, cinq, six, huit et plus hélices - hélicoptères, tricoptères, quadro, penta-, hexa et octacoptères, respectivement.
L'un des premiers tricoptères, 2010Et maintenant, après de longues expériences, les modèles ont commencé à voler de manière stable. Vous ne pouviez pas avoir peur qu'elle ne tombe latéralement dans l'air ou que les vibrations pendant le vol interfèrent avec le contrôle.Bikopter Dans un premier temps, chacun s'est fixé autant d'hélices qu'il le souhaitait, mais plus tard, chaque schéma a néanmoins trouvé son application.Envergure d'un quadricoptère avec une caméra GoPro Hero 3 à bord à travers des feux d'artifice, mieux vu en HD, 2014Les machines à trois et quatre moteurs sont de plus en plus utilisées pour les vols de loisir, pour filmer des vidéos, et l'augmentation du nombre d'hélices était utile dans les hélicoptères pour le transport de marchandises, ainsi que dans les cas où la fiabilité est requise d'un multicoptère. Après tout, si l'un des moteurs du modèle d'hélicoptère tombe en panne, son crash se produit inévitablement, puis dans le cas des modèles à plusieurs moteurs, la charge du moteur en panne peut être répartie entre d'autres et la machine peut être maintenue en l'air. Depuis longtemps, les différends entre adhérents des tricoptères et quadrocoptères sur l'équilibre entre simplicité et stabilité de vol ne se sont pas apaisés.Oktakopter, spécialement conçu pour le transport de marchandises, 2012
Dans un premier temps, chacun s'est fixé autant d'hélices qu'il le souhaitait, mais plus tard, chaque schéma a néanmoins trouvé son application.Envergure d'un quadricoptère avec une caméra GoPro Hero 3 à bord à travers des feux d'artifice, mieux vu en HD, 2014Les machines à trois et quatre moteurs sont de plus en plus utilisées pour les vols de loisir, pour filmer des vidéos, et l'augmentation du nombre d'hélices était utile dans les hélicoptères pour le transport de marchandises, ainsi que dans les cas où la fiabilité est requise d'un multicoptère. Après tout, si l'un des moteurs du modèle d'hélicoptère tombe en panne, son crash se produit inévitablement, puis dans le cas des modèles à plusieurs moteurs, la charge du moteur en panne peut être répartie entre d'autres et la machine peut être maintenue en l'air. Depuis longtemps, les différends entre adhérents des tricoptères et quadrocoptères sur l'équilibre entre simplicité et stabilité de vol ne se sont pas apaisés.Oktakopter, spécialement conçu pour le transport de marchandises, 2012Poursuite du développement et perspectives
Grâce à l'amélioration de l'électronique embarquée et à l'utilisation de modules GPS, les modèles ont appris à maintenir leur position dans l'espace et une hauteur constante. Le multicopter a commencé à mettre le télécontrôle, qui en anglais est appelé FPV - First Person View, une vue à la première personne. Avec lui, vous pouvez contrôler le drone, caresser le monde grâce à une caméra montée dessus. Sur le Web, presque toutes les vidéos sont désormais supprimées de ces drones.Des courses en hélicoptère sont organisées, ce qui est facilité par un système de contrôle à la première personne.Drones contrôlés par FPV, 2015Plus tard, une entreprise d'un institut technologique a commencé à développer un système de contrôle automatique non seulement d'un, mais de plusieurs multicoptères et a obtenu des résultats impressionnants: non seulement ils ont pu faire voler un essaim d'appareils électriques le long de chemins prédéterminés sans entrer en collision. En leur ajoutant un éclairage et en utilisant un multicoptère séparé comme pixel, ils ont pu en composer des images volumétriques et des inscriptions. Ils ont d'abord appliqué leur invention dans une publicité d'Intel.Hologramme de drones, 2015Déjà en 2011, un prototype de multicoptère a été construit, capable de soulever une personne au-dessus du sol. Maintenant, cette direction se développe activement. Après tout, le transport de personnes présente des avantages par rapport aux hélicoptères. Il s'agit de la commodité du contrôle, de tailles plus compactes, de l'électricité comme carburant et de la sécurité en raison de la présence de plusieurs hélices au lieu d'une ou de deux.Le premier multicoptère avec un homme à bord, 2011Le dispositif des drones continue de s'améliorer, pour eux il y a de plus en plus de domaines d'application. Les multicoptères sont améliorés par de nombreux avionneurs, dont Boeing. Pourquoi existe-t-il Boeing - la poste russe elle-même expérimente déjà la livraison de marchandises par avion.Voler dans un quadricoptère avec une vue à la première personne à partir de laquelle est à couper le souffle, 2017., , , , , — !