Vous ne savez probablement pas combien j'apprécie
Habr . Ce n'est pas seulement un site avec des informations pertinentes. Il s'agit d'une communauté de personnes en réseau. Dans cet article, une courte histoire sur la façon dont
Habr réalise ses rêves . Comment en 6 mois vous pouvez faire un MVP à partir d'une idée, trouver des investisseurs et créer quelque chose de nouveau. Le poste que vous ne devriez pas avoir peur de mettre en œuvre des idées, ne les laissez pas accumuler de la poussière jusqu'à des temps meilleurs. Sous la coupe, il y a beaucoup de photos du terrain, d'un voyage en République Dominicaine, des métamorphoses du robot dues au habranetorking.
Peut-être que notre histoire vous motive à réaliser vos idées qui ont longtemps éclos, mais qui n'ont pas osé se concrétiser. Pour ce faire, l'article
contacte des fonds d'investissement en Fédération de Russie .
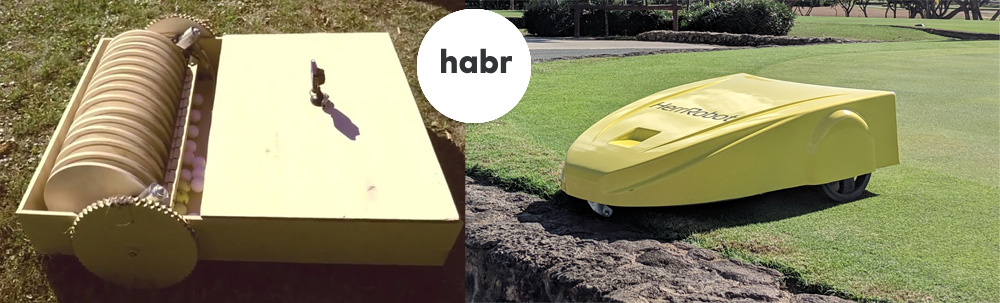
Dans le golf, il y a un practice, c'est un terrain d'entraînement pour pratiquer les coups longs et moyens. Jusqu'à 20 000 objectifs peuvent y apparaître par jour. Ces balles doivent être collectées d'une manière ou d'une autre. Habituellement, un équipement spécial attaché à la voiture est utilisé pour la collecte. Il s'agit des frais de personnel, de l'entretien de l'équipement, des dommages causés aux balles par l'équipement, des dommages au terrain.
À l'été 2018, mon ami Michael Vikrent, professeur de golf en Allemagne, a parlé de la douleur des administrateurs de clubs de golf, et j'ai trouvé une solution sous la forme d'un robot. J'ai assemblé le premier prototype en contreplaqué et j'ai écrit un
article à ce sujet
sur habr.com et j'ai obtenu une large réponse. Maintenant, nous sommes déjà 4 personnes dans l'équipe, des professionnels ayant une expérience dans des entreprises mondiales.
Le message principal du message est que vous n'avez peut-être pas tout parfait, il est important d'agir. Si je gardais mon idée, la protégeais et la chérissais, rien n'en sortirait. J'ai fait la première option (très loin d'être idéale) et en ai parlé. Cela a permis de trouver des personnes partageant les mêmes idées avec lesquelles, je l'espère, nous resterons de bons amis. Ci-dessous, une photo de notre team building à Moscou!

Plus loin sur le cas, la mécanique, la carte de contrôle et le logiciel, je voudrais montrer ce qui était au début et à quoi il ressemble maintenant. Les progrès sont particulièrement visibles en raison de l'effet de base bas.
Logement
La première version du corps était terrible et criait que nous avions besoin d'un homme pour résoudre ce problème. Habr a aidé à trouver une telle personne. Maintenant, le boîtier est conçu par
NikitaKhvoryk .
Première option Option en fibre de verre pour l'évaluation dimensionnelle
Option en fibre de verre pour l'évaluation dimensionnelle Formage sous vide
Formage sous vide
La version actuelle est avec peinture et renfort en fibre de verre.

Le progrès est visible à l'œil nu, et tout cela est le résultat du réseautage.
Corus inférieur
Pour faciliter la fabrication de la structure, la partie inférieure du corps est en matériau composite et fraisée. À chaque itération, nous ajoutons de nouvelles pièces et trous au corps, qui dans le précédent ont été modifiés à la main.

La mécanique
Tout était adapté pour tester l'idée, même les moteurs noname ali et les engrenages imprimés.

Bien sûr, tout cela devait être remplacé pour un développement ultérieur, même le changement de moteur et l'impression des engrenages à chevrons n'ont pas sauvé. Cette option d'entraînement n'est pas définitive, maintenant nous attendons une courroie de distribution et des poulies pour faciliter la conception.

Frais
Il y eut d'abord un mot, puis une planche à pain. À quoi ressemble l'entrelacement des fils? C'est vrai, le berceau du chat.
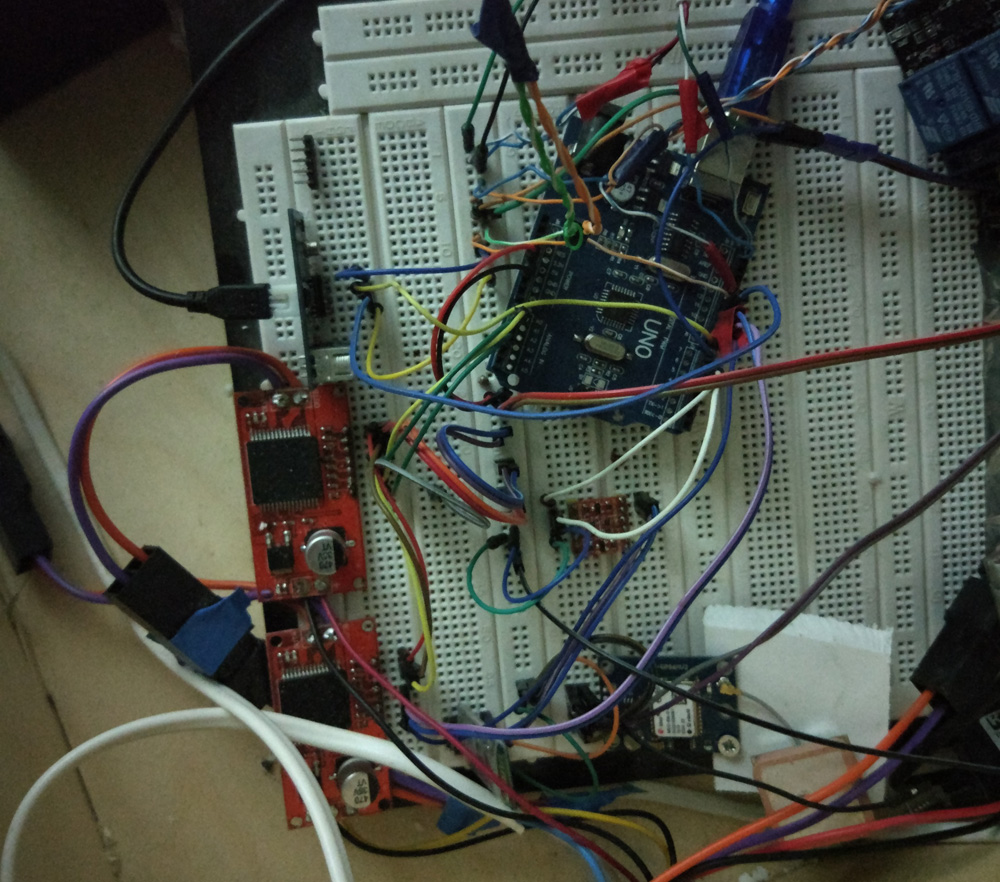
Voici à quoi ressemblait la première planche à pain compacte.

Ensuite, l'utilisateur
SkyserR s'est mis au
travail . Il a conçu et assemblé une carte de connexion de module pour la version Raspberry Pi.
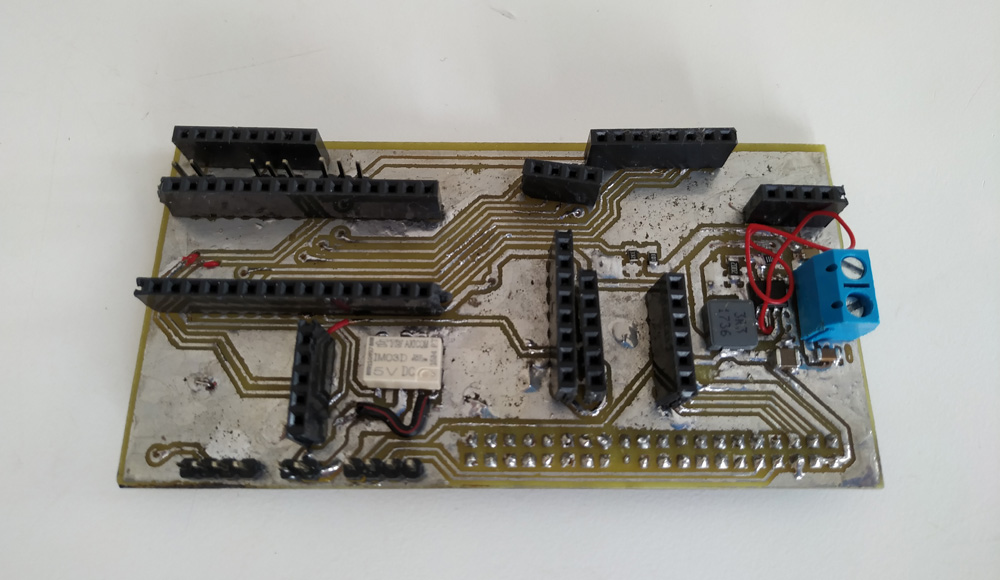 Version de carte de Resonite
Version de carte de Resonite
La version avec Ardupilot est en cours de développement par Vladimir Goncharov
Shadow_ru . Vous pouvez en lire plus
ici .
Nous remercions
Process0169 ,
Trif ,
tersuren ,
vasimv ,
vovaekb90 ,
r00mka , Vyacheslav Soldatov, Levon Zakaryan, Sergey Pomazkin, Vladi Kuban, Karen Musaelyan, Alexei Platonov pour l'aide et les conseils. Si vous voulez aider - veuillez m'écrire dans le LAN ou
VK ,
FB .
Logiciels
Initialement, tous les logiciels étaient auto-écrits. Scripts Python et croquis Arduino. Mais lorsque fatigué de faire du vélo, je suis passé à Ardupilot et ROS.
Nous avons MVP et maintenant nous développons simultanément une partie matérielle et logicielle. Nous utilisons des solutions open source et écrivons notre propre logiciel. Nous avons des partenaires partenaires en Russie et en Chine qui nous fournissent des composants.
Passer d'un passe-temps à l'expérimentation d'un produit
En octobre, il est devenu clair que ce projet pouvait devenir commercial. Nous avons soumis une demande à l'accélérateur de Sberbank et de 500 startups, mais nous avons reçu une réponse concernant l'écart par rapport à l'objectif d'investissement. En général, ils avaient besoin de projets pour la phase de pré-ensemencement, ce qui ne nous convenait pas à l'époque. Ensuite, la candidature pour le "Grant Competition EXPO 2020 Dubai", nous n'avons même pas obtenu de réponse de leur part. Nous avons déposé une candidature auprès de la Fondation pour la promotion du développement des petites entreprises (Fonds Bortnik) pour le programme Start-1, nous attendons une réponse.
Discours à l'événement "Reconnaissance Fight"

Nous avons participé à une session de pitch, parlé de notre projet. Des contacts ont été reçus par 3 fonds d'investissement et deux investisseurs indépendants. La participation est gratuite, les événements sont en cours. Je le recommande vivement, il vous permet de trouver des investisseurs, de préparer votre présentation, de trouver des faiblesses dans le projet. C'est une rencontre avec l'un des fonds de l'événement qui a permis de recevoir la première offre.
La photo Combat du renseignement Après l'événement, nous avons envoyé une présentation du projet aux fonds russes. Cela nous a permis d'obtenir une invitation à une deuxième réunion et d'entamer des négociations.
Contacts des fonds en Fédération de Russie Une bonne option est également de contacter un investisseur qui a un projet similaire dans son portefeuille ou qui investit dans ce sujet. J'ai utilisé le site
rb.ru/company/?niche=119 et choisi des startups robotiques. Il a analysé qui avait investi en eux et leur a envoyé une présentation. Cette méthode convient à la première touche. Ce n'est pas un fait que quelqu'un prend ces e-mails au sérieux, mais cela augmente considérablement la base de contacts. Comment les utiliser dépend de vous.
Fonds aux États-Unis pour lesquels nous préparons des demandes.- Combinateur Y
- 500 démarrages
- Plug and play
- Techstars
- Seedcamp
- SOSV
- StartUpBootCamp
- Starta
Si vous avez de l'expérience dans la présentation d'un projet aux USA et que vous souhaitez nous aider,
écrivez-moi sur les réseaux sociaux.Voyage en République dominicaine en février 2019
"Esto es un robot que collecta las bolas de golf" - J'ai dit, parce que je ne sais pas comment serait l'espagnol "Non, ce n'est pas un électro-mouton", je pense que cela sonnerait à peu près la même chose pour une personne âgée d'Haïti ensoleillée et fraternelle.

Habroyzer
tersuren nous a invités en République Dominicaine. Nous avons donc eu l'occasion de tester notre robot en hiver et de ne pas attendre mai pour élaborer les
algorithmes de construction de la trajectoire par GPS. Dans le même temps, les tests eux-mêmes ont eu lieu dans l'un des meilleurs clubs de golf au monde. Nous avons tourné une vidéo du robot travaillant dans un club de golf, ce qui a été très utile pour communiquer avec les investisseurs et démontrer les capacités du robot.
vasimv vit et travaille en République dominicaine sur un
robot de tonte . Étant donné les postes permanents dans le haut de l'émigration, si vous êtes engagé dans le ROS, la robotique ou l'électronique, tout en pensant à
déplacer votre lieu de résidence pendant une longue période, écrivez à
tersuren .

Voler avec un robot est toute une histoire. En plus du robot 1100 * 800 * 300, il était également nécessaire de transporter en quelque sorte des pièces détachées, des effets personnels. En général, j'ai pris un ordinateur portable et des batteries dans un sac à dos. Et effets personnels, cadeaux de Russie, moteurs de rechange, roues, câbles, etc. placé directement dans le robot, dans le compartiment à billes. Vous devriez voir les visages surpris de l'aéroport et des douanes. Le robot y a été emmené plusieurs fois dans le scanner. Je me suis retrouvé dans les deux cas avec la question:
c'est quoi? Compte tenu de l'immense inscription HERROBOT à bord, il me semblait qu'il n'y aurait pas de questions. Et donc, en fait, c'est clair!
Photos de la République Dominicaine Pas sans Epic-fail. Nous nous sommes précipités pour commander la planche de manière résonnante, donc l'un des contacts s'est révélé confus. Il a été soudé à la morve. En raison de l'humidité, le conducteur du câblage a fonctionné dans le temps. Il ne pouvait être question de tester des algorithmes avec des problèmes de bas niveau. "Soma grammes et pas de drames." Ensuite, nous sommes passés à des versions de test sur Beaglebone et Ardupilot.
Moi, surmontant la chaleur, et
Shadow_ru surmontant le froid avec une différence de 7 heures à cause des fuseaux horaires, j'ai introduit des changements urgents à l'Ardupilot pour le faire fonctionner dans de nouvelles conditions. Les ESC, remplacés par des brûlés, auraient dû être sortis de la boutique en ligne la veille du départ de la Russie, mais pas le destin. Les contrôleurs existants comprenaient le PWM et beaglebone n'émettait obstinément que la fréquence du service. Au final, j'ai dû faire un pont depuis Arduino. Tout a été fait à la hâte, mais soudain, quelqu'un a besoin d'un code.
Croquis de pont pour convertir la fréquence en PWM#include <math.h> int ch0,ch1,pwm,pwm2; void setup() { //Declaring LED pin as output pinMode(A1, INPUT); pinMode(A0, INPUT); pinMode(2, OUTPUT); pinMode(3, OUTPUT); pinMode(4, OUTPUT); pinMode(5, OUTPUT); pinMode(6, OUTPUT); pinMode(7, OUTPUT); Serial.begin(9600); while (!Serial) { ; // wait for serial port to connect. Needed for Leonardo only } } void loop() { ch1 =pulseIn(A1, HIGH); if(ch1<1470){ pwm=(1500-ch1)/2; analogWrite(7, pwm); digitalWrite(6,LOW); digitalWrite(5,HIGH); }else if(ch1>1530){ pwm=(ch1-1500)/2; analogWrite(7, pwm); digitalWrite(6,HIGH); digitalWrite(5,LOW); }else{ pwm=0; analogWrite(7, pwm); digitalWrite(6,LOW); digitalWrite(5,LOW); } ch0 =pulseIn(A0, HIGH); if(ch0<1470){ pwm2=(1500-ch0)/2; analogWrite(4, pwm2); digitalWrite(3,LOW); digitalWrite(2,HIGH); }else if(ch0>1530){ pwm2=(ch0-1500)/2; analogWrite(4, pwm2); digitalWrite(3,HIGH); digitalWrite(2,LOW); }else{ pwm2=0; digitalWrite(3,LOW); digitalWrite(2,LOW); } Serial.print("ch0="); Serial.println(ch0); Serial.print("ch1="); Serial.println(ch1); Serial.print("pwm2="); Serial.println(pwm2); for(int i=0; i<255; i++){ delay(5); } }
Vidéo promotionnelle après le voyage
Vidéo de rendu 3D avant le voyage
Maintenant, il n'y a qu'un seul concurrent dans le monde et cela coûte 15 000 $. Dans le monde de 34 000 clubs de golf, tout le monde dépense au moins 1 500 $ / masse pour ramasser des balles. Il s'agit d'un marché de plus de 600 M $ / an. Notre programme minimum est la vente et l'entretien ultérieur de 1000 robots. Même lorsqu'il est vendu à un prix inférieur de 40% à celui de la concurrence, cela représente environ 8 millions de dollars de revenus.
Nous avons un accord préliminaire avec des clubs de golf intéressés à tester le robot sur leur terrain en Allemagne, Australie, Nouvelle-Zélande, Suède et République dominicaine. Et tout cela grâce à Habr.
Savez-vous comment réaliser vos rêves et donner vie à vos idées? Calme Fermez les yeux et profitez du moment. Aucun Eckhardt Tolle ne vous parlera de la puissance du moment, si vous faites défiler les mêmes pensées et qu'elles ne vous donnent pas de repos. Vous ajoutez des détails à votre projet, mais ne commencez pas à le faire. Vous oubliez un moment, puis quel type de déclencheur provoque à nouveau des images de l'idée du projet de rêve. C'est exactement la raison pour laquelle commencer à le faire. N'attendez pas le moment parfait, le moment parfait maintenant!

Un tel robot est-il nécessaire du tout? Le golf n'est pas si répandu en Russie jusqu'à présent, mais nous nous sommes tournés vers des experts de l'industrie pour connaître leur opinion. Tous conviennent que ce robot est nécessaire.


Nous nous sommes tournés vers les leaders du marché de la robotique en Russie pour connaître leur opinion sur les robots de service pour la résolution des tâches de routine. Il s'agit sans aucun doute d'une tendance difficile à contester.

Nous allons affiner et promouvoir notre robot, car nous ne pouvons que le faire. Pour accélérer, nous avons besoin de votre aide et de votre soutien!
Plans
Début mars, nous avons prévu un autre terrain. Pourquoi, s'il y a déjà une offre? Je ne sais pas encore, nous partons en tant que Siddhartha, le chemin nous trouve. En mars, nous devons finaliser tous les algorithmes pour un travail complet et commencer à tester les terrains de golf dans la Fédération de Russie en avril. En juin, participation à l'exposition, publication dans les publications européennes de golf. Au cours de l'été 2019, nous devons fabriquer 25 robots et commencer des tests en Allemagne et en République dominicaine. À l'automne, commencez à vendre en tant que service. Et en 2020, entrez sur le marché américain.
En 2020, sortir un modèle de tondeuse à gazon qui fonctionne sur le même algorithme pour construire une trajectoire pour résoudre tous les problèmes dans le domaine de conduite.
Ce sont des jalons simples, merci pour votre soutien.
Nos articles:PS: Ce robot n'aurait pas été sans
Habr .