L'industrie automobile connaît actuellement une révolution dans la conduite autonome. Un véhicule sans pilote peut offrir un niveau de sécurité plus élevé aux passagers, car sa gestion est dépourvue de facteur humain. L'utilisation généralisée de véhicules sans pilote à l'avenir réduira le nombre d'accidents et permettra également aux gens de passer du temps à conduire quotidiennement.
OSCAR (Open-Source CAR) est un projet de recherche du véhicule sans pilote StarLine open-source, combinant les meilleurs esprits de l'ingénierie de la Russie. Nous avons appelé la plateforme OSCAR parce que nous voulons rendre chaque ligne de code concernant la voiture ouverte à la communauté.

Anatomie de la plateforme
En tant qu'utilisateur du véhicule, le propriétaire de la voiture souhaite se rendre du point A au point B en toute sécurité, confortablement et dans les délais. Les récits d'utilisateurs sont variés, allant d'un voyage au travail ou au shopping et se terminant par des sorties entre amis ou en famille sans avoir constamment besoin de garder un œil sur la route.
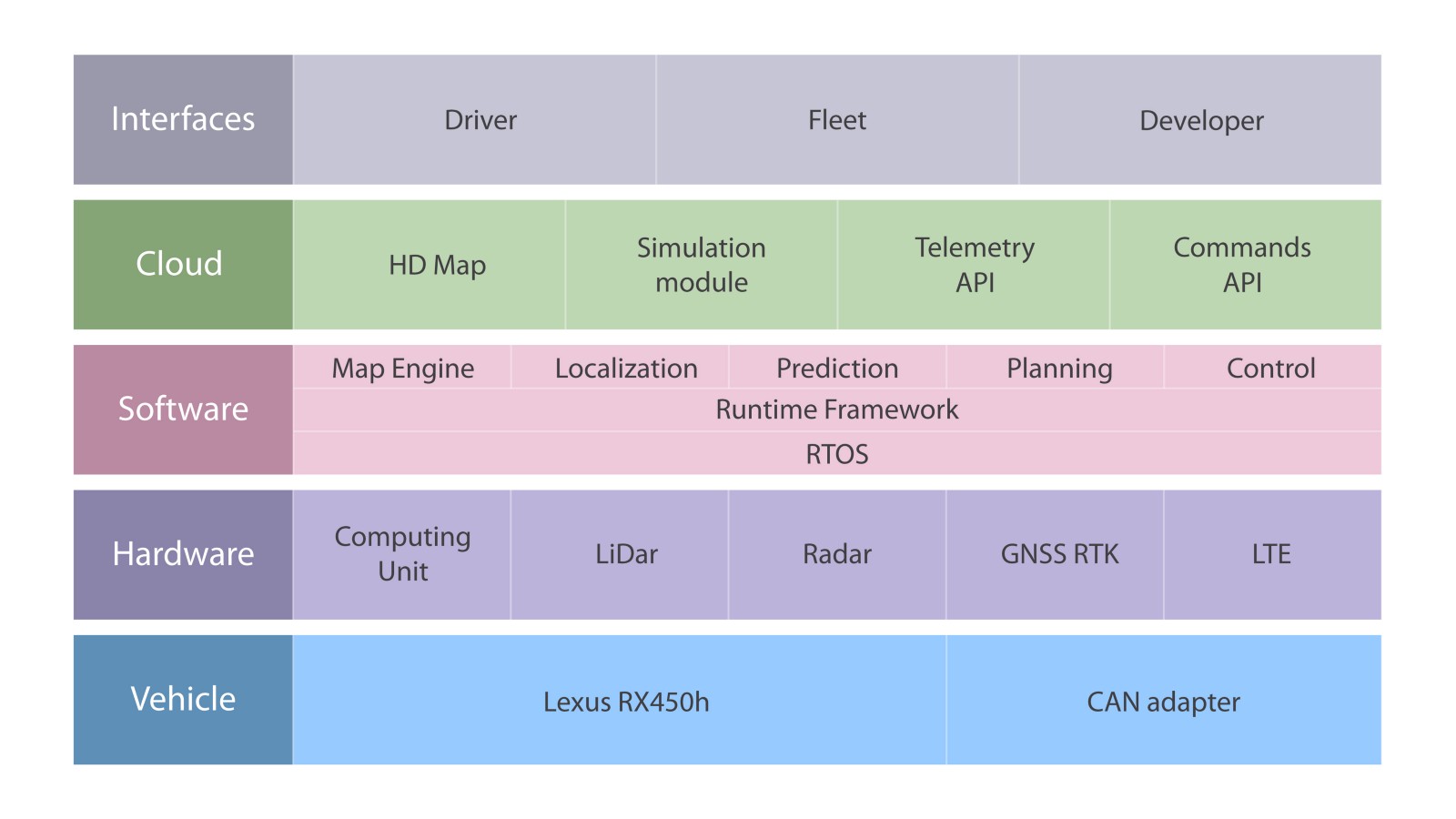
Par conséquent, le niveau le plus élevé de la plate-forme concerne les applications et les environnements utilisateur. Nous comptons sur trois groupes d'utilisateurs: les utilisateurs individuels, les développeurs commerciaux et les développeurs de plateformes. Pour chacun de ces groupes, nous concevons aujourd'hui une interface distincte. Le deuxième niveau est la partie serveur, qui comprend des cartes haute résolution, un module de simulation, ainsi que des API qui servent la voiture. Le niveau logiciel est la création de programmes qui seront intégrés dans la voiture. Et les deux niveaux inférieurs de la plate-forme sont des travaux sur la voiture elle-même, ce qui implique d'examiner l'interface numérique de la machine elle-même et d'installer des équipements.
Voiture
Une voiture moderne peut avoir jusqu'à 70 unités de commande électroniques pour différents sous-systèmes. Habituellement, le processeur le plus puissant est l'unité de commande du moteur, tandis que d'autres sont utilisés pour contrôler la transmission, les airbags, le système de freinage antiblocage, les systèmes audio, le réglage des rétroviseurs ... Certains d'entre eux forment des sous-systèmes indépendants, tandis que d'autres échangent des informations et des commandes entre eux.
Pour assurer la communication entre les appareils du véhicule, la norme CAN a été développée.
Le bus CAN est une norme de réseau industriel, ainsi qu'un système de communication numérique et de contrôle des appareils électriques d'une voiture. Les appareils de voiture sont connectés au bus CAN en parallèle pour envoyer et recevoir des données. En ayant accès à cette interface numérique, vous pouvez, par exemple, allumer le moteur, ouvrir les portes, rabattre les rétroviseurs de la voiture à l'aide des commandes de contrôle.
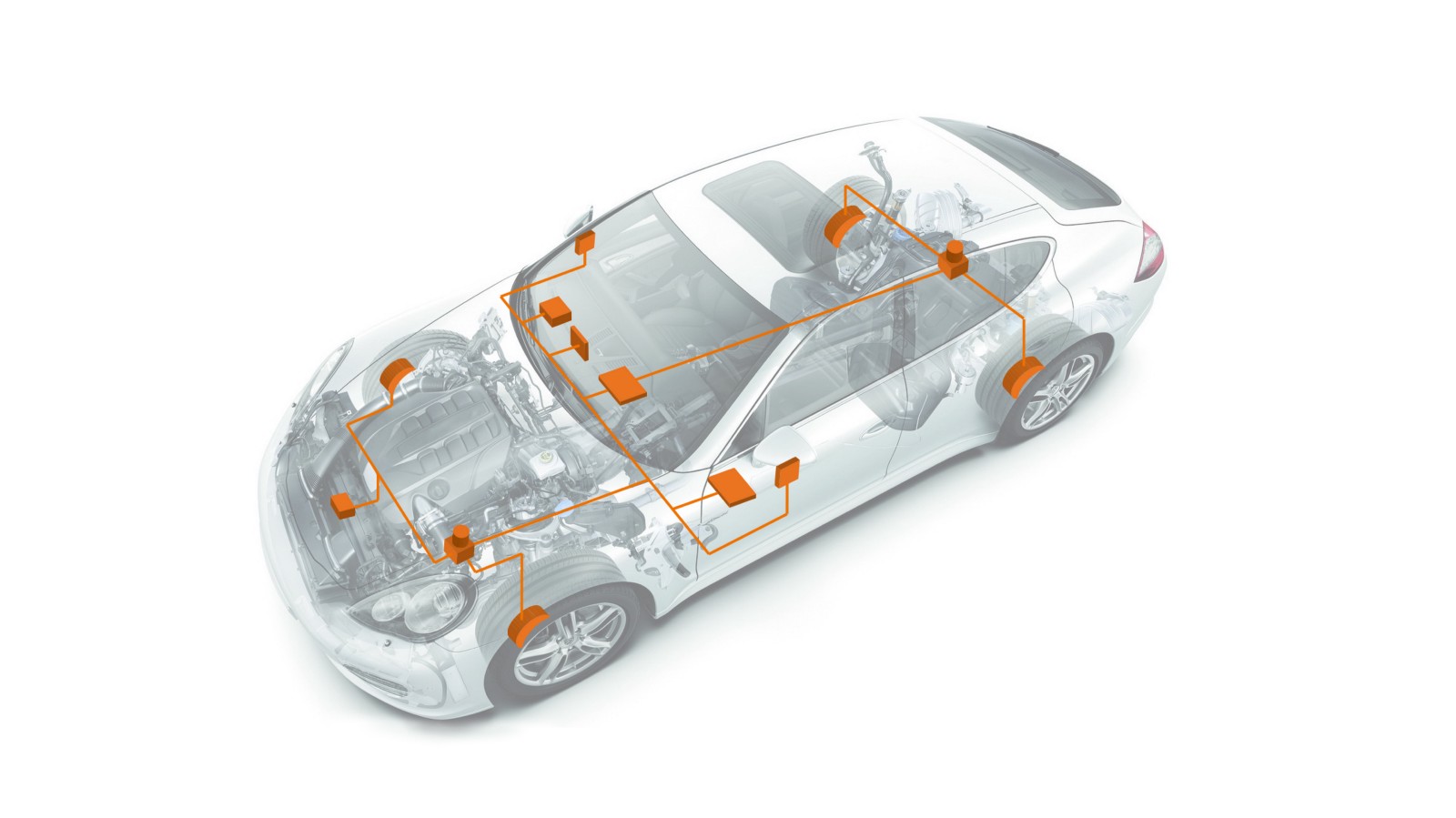
Pour contrôler l'accélération et la direction de la voiture, nous devions accéder au bus CAN et comprendre les types de paquets correspondants. NPO StarLine est un fabricant d'appareils électroniques, nous avons donc développé notre propre adaptateur de bus CAN.

Actuellement, nous pouvons diriger, freiner et accélérer à l'aide d'un ordinateur portable.

Équipement
Un domaine de travail important consiste à équiper le véhicule de capteurs et de capteurs. Il existe un certain nombre d'approches pour équiper un véhicule sans pilote. Par exemple, certaines entreprises utilisent des lidars coûteux, tandis que d'autres les refusent, se limitant aux lectures d'autres appareils.

Désormais, la voiture sans pilote StarLine est équipée de plusieurs caméras mono et binoculaires, radars, lidars, ainsi que de la navigation par satellite.
La tâche du récepteur GPS est de déterminer son emplacement dans l'espace, ainsi que l'heure exacte. Les récepteurs GPS civils ont une précision insuffisante pour positionner un véhicule sans pilote; l'erreur peut aller jusqu'à plusieurs mètres. Cela se produit à la fois en raison de la ré-réflexion du signal des murs des bâtiments dans un environnement urbain et en raison de facteurs naturels mal prédits, par exemple, les changements de vitesse d'un signal provenant d'un satellite dans l'ionosphère terrestre.
Pour positionner un véhicule sans pilote, l'erreur du récepteur GPS civil est trop importante, et donc, dans notre développement, nous utilisons la navigation par satellite ultra-précise. Pour ce faire, un récepteur GNSS RTK a été installé sur la voiture, qui utilise des techniques de positionnement plus avancées et n'atteint ainsi une précision de positionnement centimétrique que par navigation par satellite.
Mais pendant la conduite, la voiture peut se retrouver dans un tunnel ou sous un pont, où les signaux des satellites sont trop faibles ou totalement absents. Pour cette raison, la précision du récepteur GNSS-RTK diminuera ou le positionnement sera complètement impossible. Dans ces cas, la voiture affinera sa position en utilisant les lectures de l'odomètre et de l'accéléromètre. Les algorithmes qui combinent les données de plusieurs sources disparates pour réduire l'incertitude sont appelés algorithmes de fusion de capteurs.
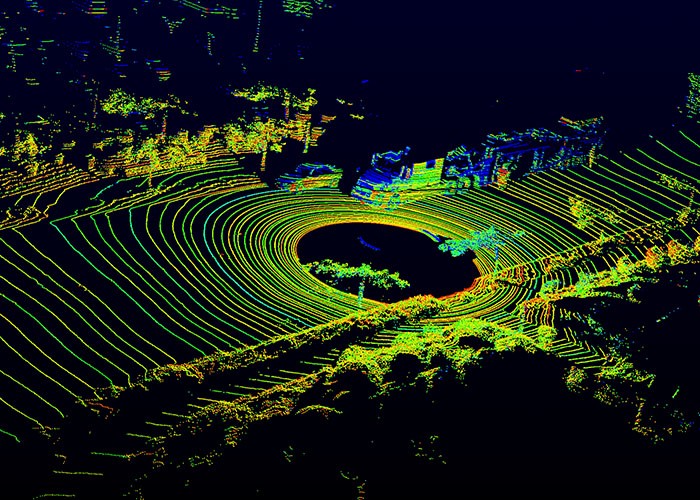
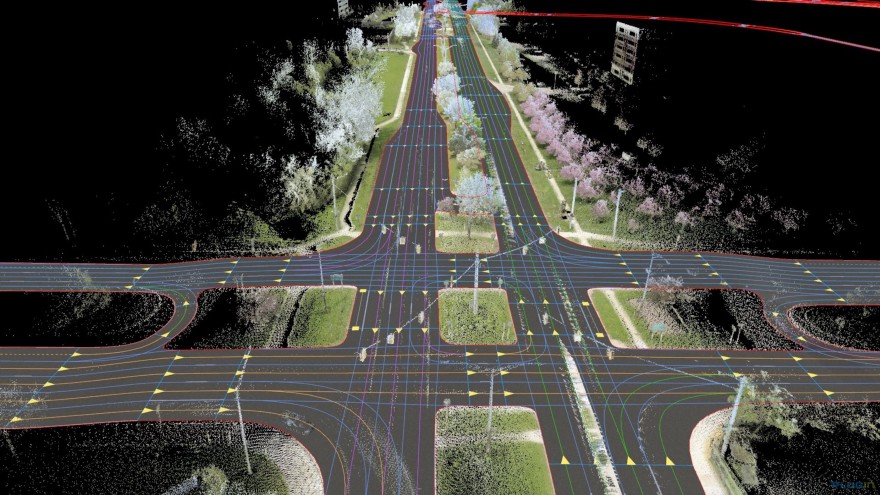
En plus de la tâche de localiser un véhicule sans pilote, vous devez également avoir une idée des obstacles dynamiques qui ne sont pas sur la carte, par exemple, les voitures se déplaçant à proximité ou les personnes traversant une route. À ces fins, un véhicule sans pilote utilise des données radar et lidar. Le radar utilise des ondes radio pour détecter les obstacles et permet également, grâce à l'effet Doppler, de calculer leurs vitesses radiales. Lidar est un télémètre optique actif qui balaye constamment l'espace environnant et forme sa carte tridimensionnelle, le soi-disant nuage de points.
Chaque appareil utilisé dans un véhicule sans pilote (de la caméra à l'unité GNSS RTK) doit être configuré avant de pouvoir être installé.
Logiciels
À plus grande échelle, le logiciel de drone se compose de plusieurs modules, notamment: reconnaissance, planification, localisation et contrôle.
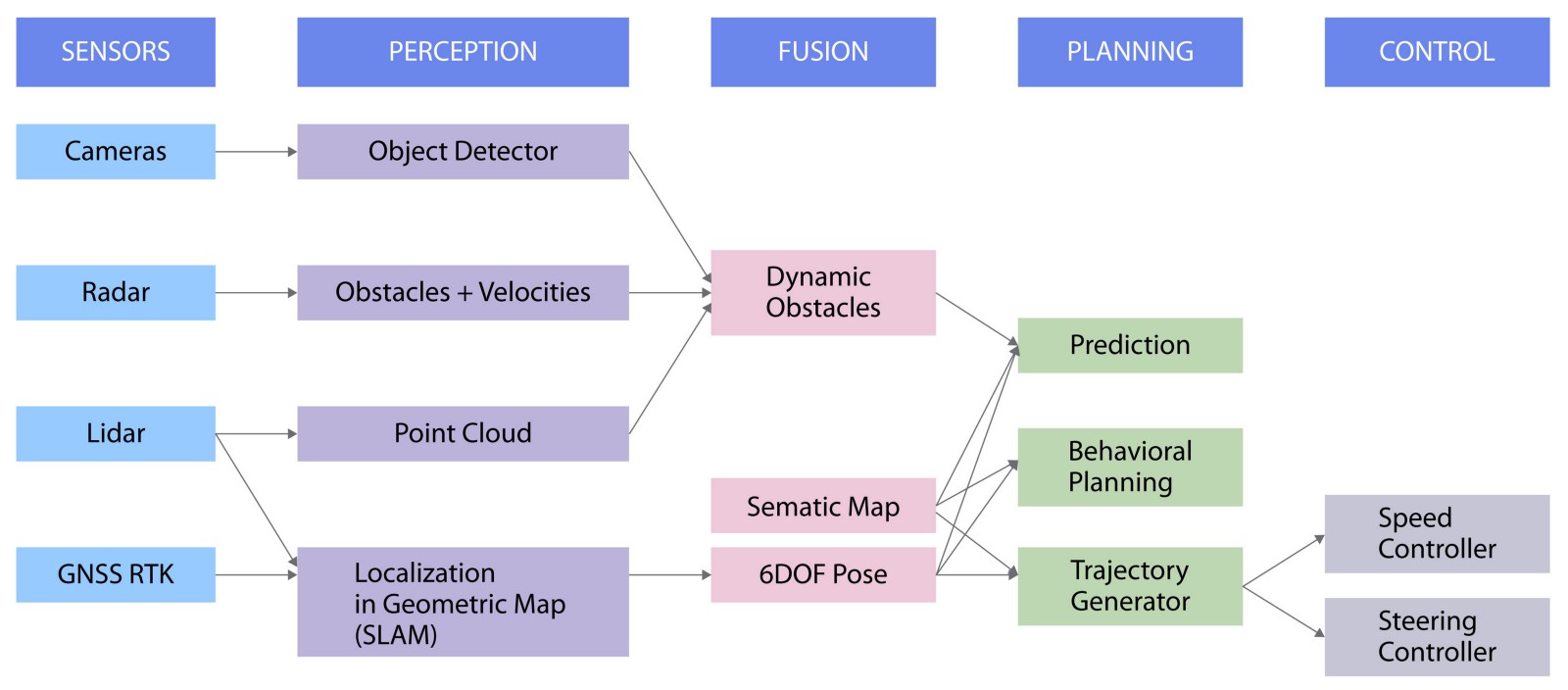
Les données des caméras sont utilisées pour reconnaître et détecter les objets, les radars reçoivent les coordonnées et les vitesses des objets environnants, les lidars fournissent à l'algorithme un nuage de points et le module GNSS RTK utilise des données satellites pour localiser la voiture.
Ensuite, les données des trois premières sources sont combinées pour obtenir des informations sur les obstacles à proximité de la voiture.
Dans le même temps, les lectures par satellite et lidar sont utilisées pour résoudre le problème SLAM, ce qui signifie la localisation et la cartographie simultanées du terrain. Il s'agit d'une approche pour créer une carte d'un environnement inconnu avec le suivi de l'emplacement d'un objet à l'intérieur. Ces informations sont utilisées pour calculer les 6 coordonnées de la voiture, qui incluent trois coordonnées spatiales et une vitesse tridimensionnelle.
L'étape suivante consiste à planifier la trajectoire locale du véhicule. La dernière étape est le module de contrôle, qui est utilisé pour exécuter réellement la trajectoire construite pendant la construction de la piste.
Actuellement, nous sommes engagés dans la configuration et l'installation d'équipements et travaillons également sur un module de contrôle de voiture.
Nuage
La partie serveur se compose de quatre blocs:
- Cartes HD
- API de télémétrie
- API de commande
- module de simulation
Tout d'abord, nous avons besoin d'un stockage pour les cartes afin de localiser correctement la voiture, ainsi que d'un service de télémétrie pour l'analyse des données. Il s'agit de notre premier schéma d'architecture de serveur, qui comprend deux blocs. Plus tard, nous allons l'étendre en utilisant l'API de commande pour pouvoir envoyer des commandes de contrôle à la voiture depuis le serveur. Nous ajouterons également un module de simulation.
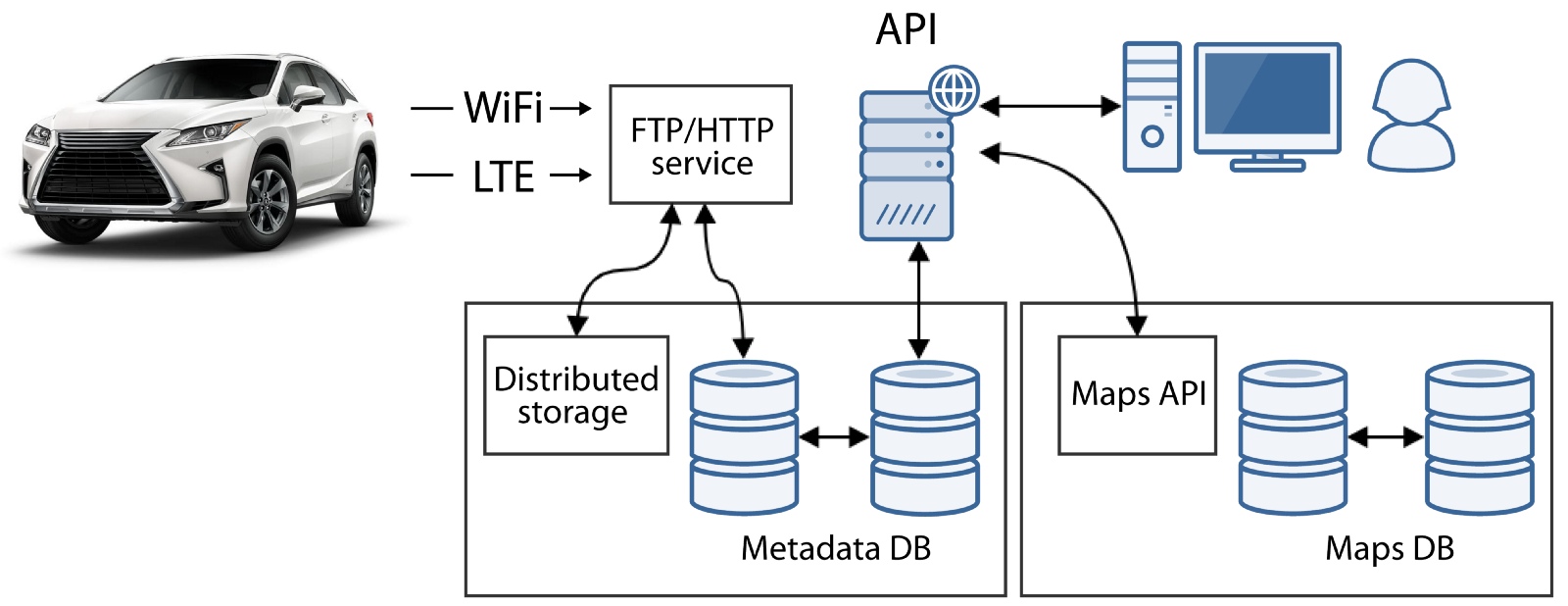
Les cartes HD sont des cartes qui offrent une image complète du monde réel précise au centimètre, y compris tout ce qui concerne l'infrastructure routière, par exemple, des informations sur les voies, les panneaux et la position des feux de circulation. La carte peut également contenir des données lidar pour permettre au drone de la localiser.
Des simulateurs sont nécessaires pour générer des situations de trafic pour le débogage et les tests. En simulant des situations de trafic, nous pouvons augmenter la robustesse de nos algorithmes en effectuant des tests unitaires sur un nombre arbitraire de kilomètres de scénarios personnalisables et de conditions rares, pour une fraction du temps et des coûts qui seraient nécessaires pour tester sur des routes réelles.

Feuille de route
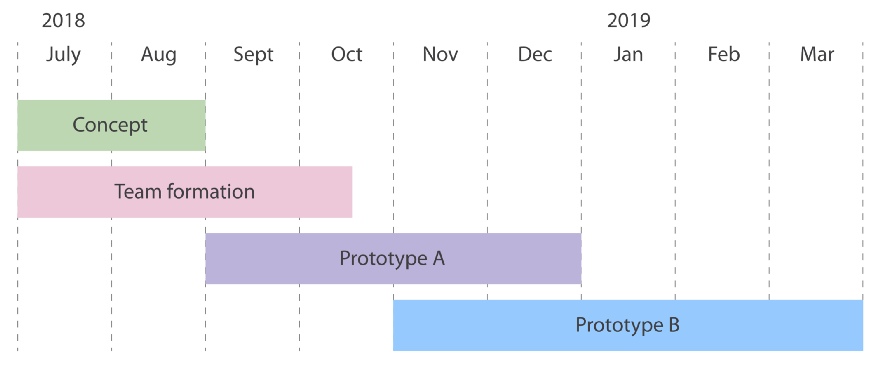
En juillet, nous avons commencé par développer un concept, créé une équipe et commencé le chemin vers le prototype A. Le prototype A est une voiture qui peut se déplacer le long des points de cheminement, mais nécessite l'intervention de l'opérateur pour éviter les obstacles. Le prototype B, dont nous prévoyons de terminer le développement au printemps 2019, est une voiture qui peut contourner les obstacles sans contrôle du conducteur.
Alors qu'est-ce qu'un drone a dans son cœur?
La voiture est basée sur des algorithmes avancés, des flux de données, des interfaces hautes performances et des équipements sophistiqués. De plus, la voiture a besoin non seulement de matériel et de logiciels, mais également d'applications serveur et client. Ce cœur technologique est ouvert, et nous comptons non seulement sur l'initiative de l'équipe StarLine, mais aussi sur l'aide de la communauté open source.
L'objectif principal du véhicule sans pilote StarLine est le désir de rendre la vie des gens plus confortable et plus sûre. La technologie est importante pour nous, mais nous croyons que les connaissances technologiques et scientifiques existent pour servir les gens, et c'est le véritable cœur de notre entreprise. Nous approchons du jour où la sécurité routière sera assurée par l'équipement et les gens auront l'occasion de consacrer plus de temps à ce qui est important pour eux. Et si vous partagez notre point de vue, nous sommes heureux de vous inviter à nous rejoindre pour créer la technologie de demain.
Projet Gitlab