Cette histoire raconte comment j'ai construit une plateforme de robot mobile et le sort de mon "NanoBot-a" ...
Tout a commencé en 2008, quand j'étais jeune naïf et stupide, j'étais engagé dans la robotique et, en général, la mécatronique. L'idée de construire un grand chariot s'est installée dans ma tête exubérante beaucoup plus tôt, et maintenant, après une longue gestation d'un plan de fabrication, j'ai commencé à construire ce miracle de la pensée des enfants.
Et j'ai donné naissance à un tel prototype:

Cadre à partir d'un tube profilé de section carrée 25x25mm. Et ses dimensions hors tout sont de 500x500x300 mm. Eh bien, oui, alors j'ai pensé à grande échelle ... Deux motoréducteurs de l'essuie-glace d'une voiture UAZ, entraînant les roues d'un petit vélo pour enfants, devaient déplacer cette chose, et devant il y avait deux girouettes. Et ce géant a été construit dans l'appartement.
Étant donné que les plans pour les algorithmes de comportement étaient «napoléoniens», un ordinateur à part entière devait être à bord du robot, il n'y avait pas d'argent pour le mini-ITX, et j'ai trouvé un PC ordinaire sur la maman d'ATX. Tout cela a été pompé à l'intérieur et au tas deux autres batteries à l'hélium, tout gainé avec une organisation de trois millimètres. verre et en général l'engin s'est avéré être en partie beau, mais très grand et lourd. Je n’ai pas réussi à le mettre en marche, car des problèmes avec l’électronique se sont posés, et de temps en temps j’ai parfois abandonné le projet, puis je me suis remis à travailler

Au final, j'ai réalisé que ce design était très encombrant, et comme l'idée principale restait dans ma tête, il a été décidé de tout recommencer ...
Après presque un an, j'ai commencé à concevoir. Ensuite, je m'intéressais simplement à la CAO et j'ai essayé de les étudier moi-même.Par conséquent, j'ai fait les dessins d'abord dans AutoCAD et un peu plus tard, je les ai traduits en 3D (quand j'ai commencé à étudier COMPASS 3D). Je vais disposer les dessins et le modèle en libre accès, qui sait qui sera utile ou qui sera intéressant.
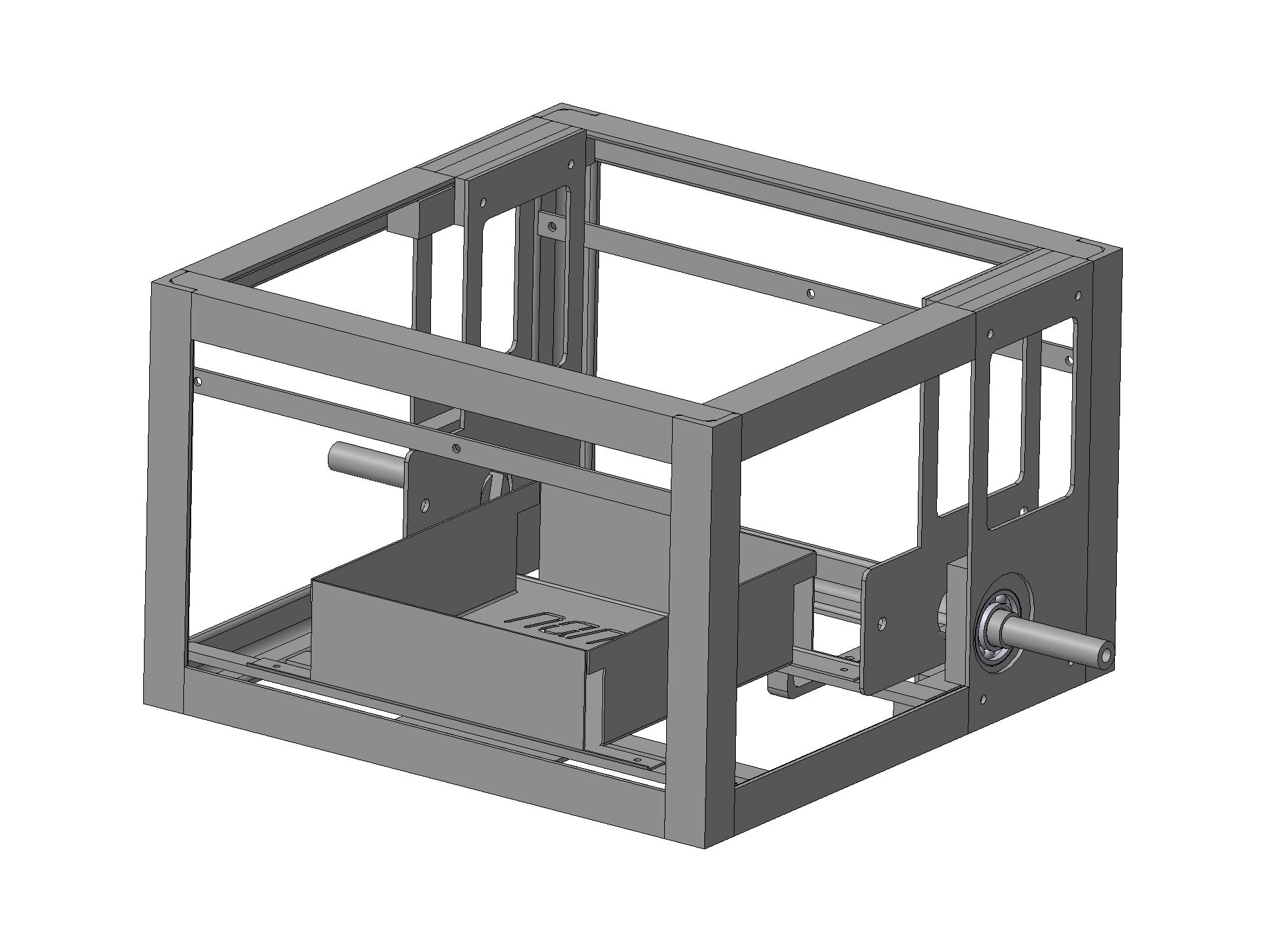
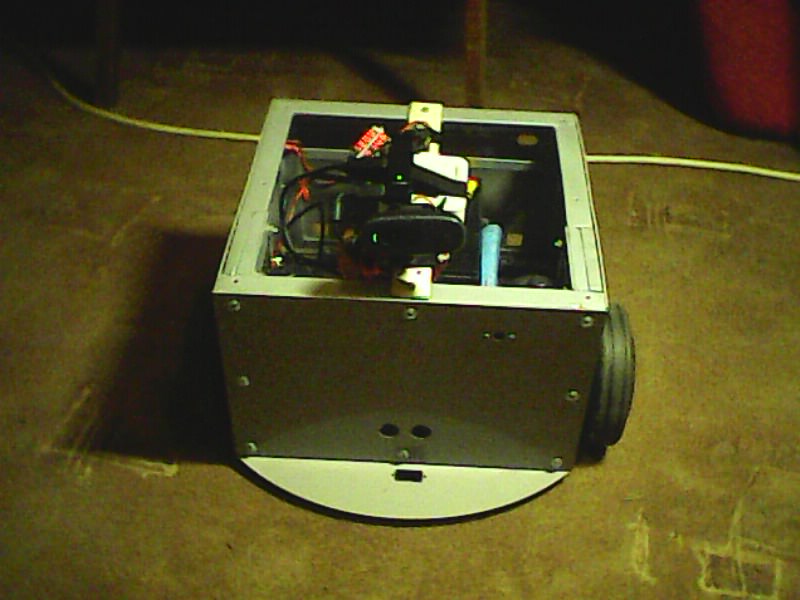
J'ai donné les dessins à une usine familière, où un cadre a été fait pour moi pour quelques bouteilles de vodka (Russie - pour lesquelles c'est cher). En taille, il était déjà plus petit que le précédent 300x300x200 et était fabriqué à partir du vingtième coin. De plus, des plaques pour la fixation du moteur et un conteneur pour la pose de deux batteries de 12 volts ont été coupés par un laser CNC.

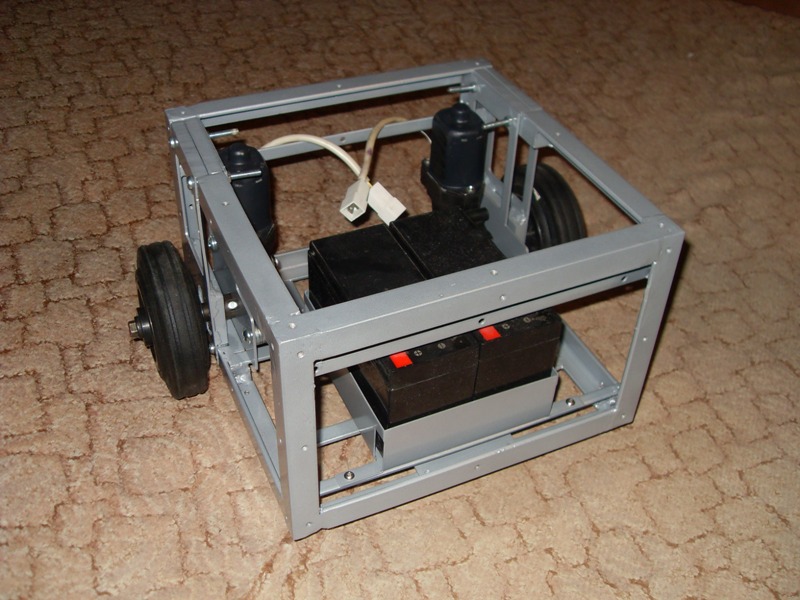
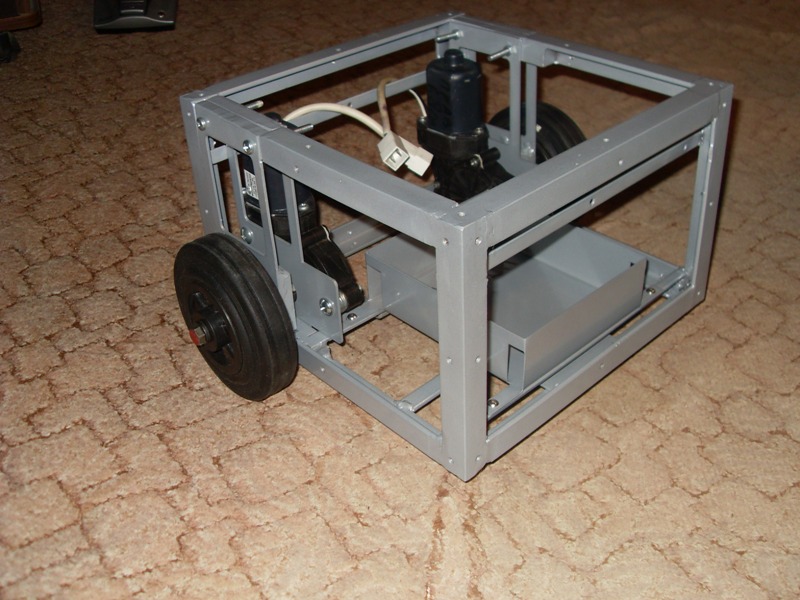
Comme tout cela a été fait depuis longtemps, le cadre a réussi à rouiller, et plus tard, je l'ai donné pour la peinture en poudre. Des roues d'un diamètre de 125 mm ont été fixées directement aux moteurs par le biais de demi-axes supplémentaires installés dans des roulements à billes. Monté à l'avant une petite roue à palettes. J'ai décidé de recouvrir le cadre avec du fer, puis cela semblait plus technologique que coupé de l'org. le verre, puisque je connaissais le bureau où ils coupaient l'acier sur la CNC, et ensuite il pouvait être peint de n'importe quelle couleur ...


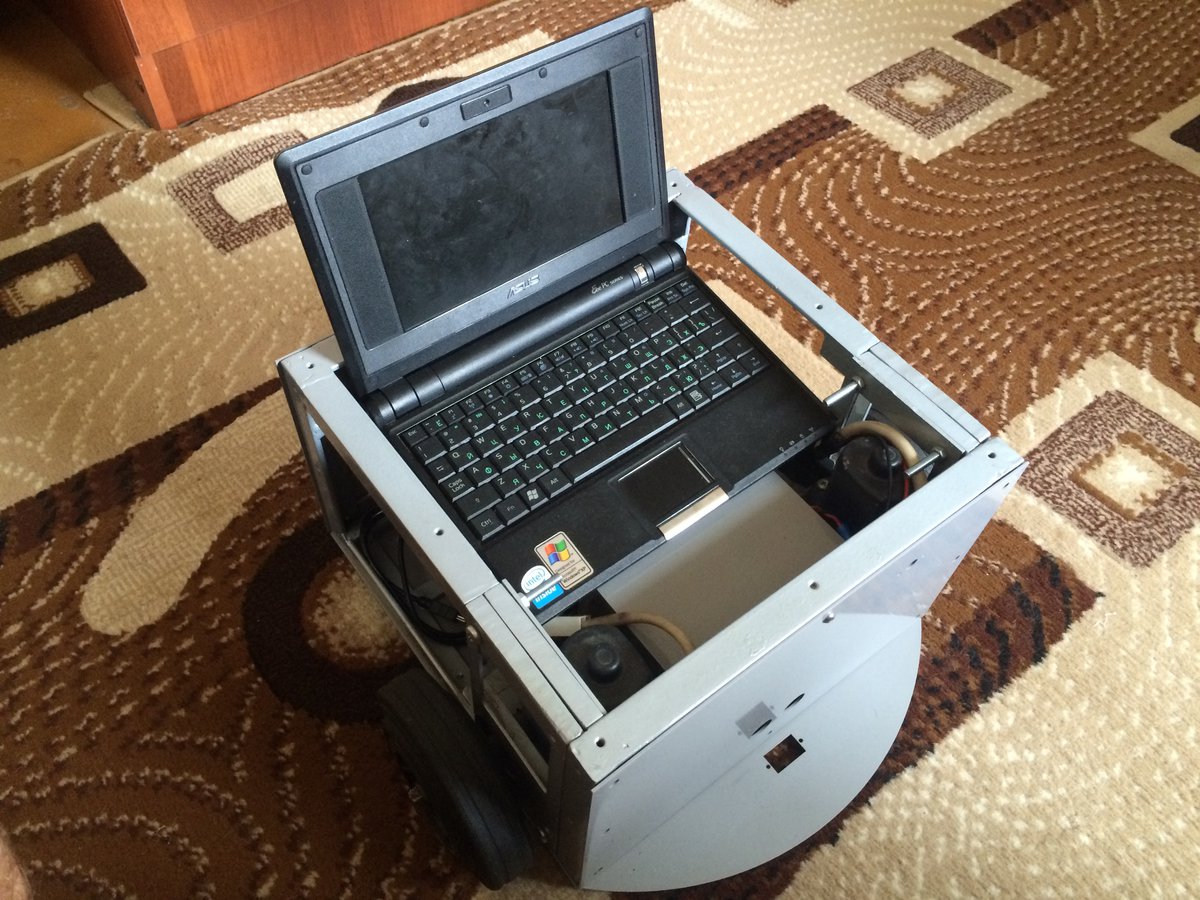
Avec le cadre, tout semble clair, passons à l'électronique. Il était prévu de contrôler le robot à distance à partir d'un PC, et à bord, le robot prévoyait également de placer quelque chose à partir de petits ordinateurs. À ce moment-là, j'avais déjà réussi à couper un vieux netbook ASUS d'un parent, de taille il s'intégrait parfaitement dans le haut du robot au-dessus des batteries. Mais pour contrôler le robot, un netbook ne suffit pas, pour cela il a fallu acheter trois autres cartes à «Open Robotics», une carte basée sur le microcontrôleur AVR pour contrôler et collecter des données OR-AVR-M128-DS, une carte pour la communication avec le netbook OR-USB-UART et pilote de carte de puissance OR-MD2-10A-12V-X, maintenant j'aurais certainement tout fait sur Arduino, mais ce n'était pas si populaire, et ces modules ont été conçus spécifiquement pour les chariots de robot. Il était prévu de connecter plusieurs capteurs télémétriques, un couple d'encodeurs à la carte de commande et de contrôler plusieurs servos pour modifier l'angle de balayage des télémètres. Je voulais faire un télémètre basé sur un pointeur laser et une caméra vidéo. Mais il n'y est jamais arrivé, tout se limitait à connecter l'électronique et à écrire un simple programme de gestion. Géré à distance à l'aide du programme TeamViewer. Dans mon programme, il y avait une simple connexion au port, une fenêtre de réception de transmission de données, une ligne d'entrée de vitesse (PWM en pourcentage) et plusieurs boutons de direction.
En conséquence, en raison de malentendus avec l'électronique, le projet a été laissé sans attention, il a été traité une fois très rarement. Au fil du temps, j'ai réalisé qu'il était dommage de jeter le développement ou de le mettre dans le garage. J'ai décidé de vendre pour une valeur symbolique. Je pensais qu'il y avait probablement des gens qui étaient également intéressés par cela, qui avaient une meilleure connaissance de l'électronique et de la programmation, peut-être que quelqu'un élaborait une sorte d'algorithmes de comportement / mouvement, ou quelqu'un avait juste besoin d'une plate-forme publicitaire dans le hall d'exposition ou le magasin (bien sûr, il pourrait se casser les jambes )
Je l'ai vendu entièrement, avec de l'électronique, une batterie, un netbook, des télémètres et des servos (découpes rectangulaires avec deux trous dans le couvercle rond inférieur et supérieur pour les servos MG996r), un écran 16x2 et une paire de matrices LED (découpes carrées dans la feuille de revêtement avant juste en dessous).

Si je comprends bien, la personne qui a acheté ma plate-forme de robot lui a donné une seconde vie. J'étais content que ce morceau de fer vive. C'était en 2016 et le voyage a commencé de la glorieuse ville d'Ivanovo à la ville héroïque de Toula.
Cependant, tout récemment, le troisième propriétaire m'a contacté et m'a dit qu'il avait maintenant une plate-forme (région de Kaliningrad). Apparemment, quelque chose s'est mal passé avec le premier acheteur ... La personne qui m'a contacté ne m'a pas déçu, mais la plateforme lui a été remise sans certains composants connexes, mais sinon tout semble intact, mais pas surprenant, car la peau du robot est en métal 1.5 mm d'épaisseur, il est temps pour lui de participer à des combats de robots ...
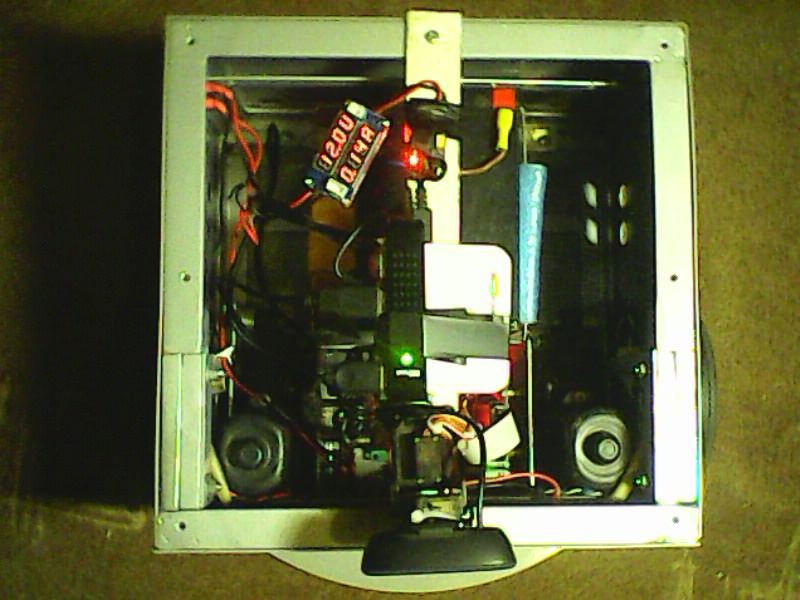
Le robot a reçu une mise à niveau, et voici ce que le nouveau propriétaire a écrit à ce sujet:
«La plate-forme est venue à moi. Par quelques manipulations, une batterie 10 Ah 12V a été fournie, un routeur TL-MR3020 avec un firmware OpenRobotisc personnalisé, une webcam Logitech C270 sur un support avec un servo, un micro-hub pour 4 ports et un convertisseur DC-DC pour alimenter le routeur ont été ajoutés. Ensuite, tout cela a été boulonné avec des chapes, du ruban électrique et d'autres moyens improvisés. "Il VIT! (C) Robocip" Un imbécile de fer infernal de 18 kg se précipitant dans une petite pièce comme échaudé et capable de faire tomber les jambes et de casser les jambes au pire ... Nous devons changer les roues en normales, changer la roue de support, réparer l'électronique normalement et cultiver fils. Et après tous les ajustements et améliorations, cette boîte miracle sera capable de faire le tour de la cour en effrayant un chat et un voisin wino. Et si vous placez un manipulateur chinois sur 6 serveurs, vous pouvez patter des objets à distance. »
Et cela vient des dernières nouvelles:
Voici une telle histoire sur mon bébé, j'espère que le nouveau propriétaire n'abandonnera pas le robot et qu'il vivra longtemps (à la fois le propriétaire et le robot). Sinon, le sort de la plateforme doit être enfoui sous un pommier pour saturer le sol en fer. Ceci, bien sûr, est un avantage certain pour le pommier, mais pas le but direct du robot créé.
Quant au nom "NanoBot", alors tout est assez simple. Beaucoup de gens se souviennent probablement de l'énorme quantité de publicité (sur la boîte zombie), dans laquelle il y avait un préfixe si populaire "nano" que j'ai décidé d'ajouter ce préfixe au nom de mon robot, d'autant plus qu'il décrivait pleinement ses paramètres physiques.