À l'Université ITMO, sur la base du Département des systèmes de contrôle et d'informatique (SUII), un laboratoire de robotique a été ouvert. Nous parlerons des projets qui sont en cours d'élaboration dans ses murs et montrerons les outils: manipulateurs robotiques industriels, dispositifs de préhension robotiques, ainsi qu'une installation pour tester des systèmes de positionnement dynamique à l'aide d'un modèle robotique d'un navire de surface.

Spécialisation
Le Laboratoire de Robotique appartient au plus ancien département de l'Université ITMO, qui s'appelle "Systèmes de Contrôle et Informatique". Elle est apparue en 1945. Le laboratoire lui-même a été lancé en 1955 - puis il a traité les questions de l'automatisation des mesures et du calcul des paramètres des navires de surface. Plus tard, la gamme des directions a été élargie: ajout de cybernétique, CAD, ainsi que robotique.
Aujourd'hui, les laboratoires améliorent les robots industriels. Les employés résolvent les problèmes liés aux interactions homme-machine - développent des algorithmes de contrôle sûrs avec le contrôle de la force du robot, et travaillent également sur des robots collaboratifs qui peuvent effectuer des tâches côte à côte avec des personnes.
Le laboratoire développe également des méthodes alternatives pour le contrôle à distance de groupes de robots et crée des algorithmes logiciels qui peuvent être reconfigurés pour effectuer de nouvelles tâches en ligne.
Les projets
Un certain nombre de systèmes robotiques de laboratoire ont été acquis auprès de grandes entreprises et sont destinés à la recherche ou à des fins industrielles. Une partie de l'équipement a été fabriquée par des employés dans le cadre de la recherche et du développement.
Parmi ces derniers, on peut distinguer la
plate-forme robotique Stuart à deux degrés de liberté. L'installation académique est conçue pour tester des algorithmes de contrôle pour garder la balle au centre du site (vous pouvez voir le système en action dans
cette vidéo ).
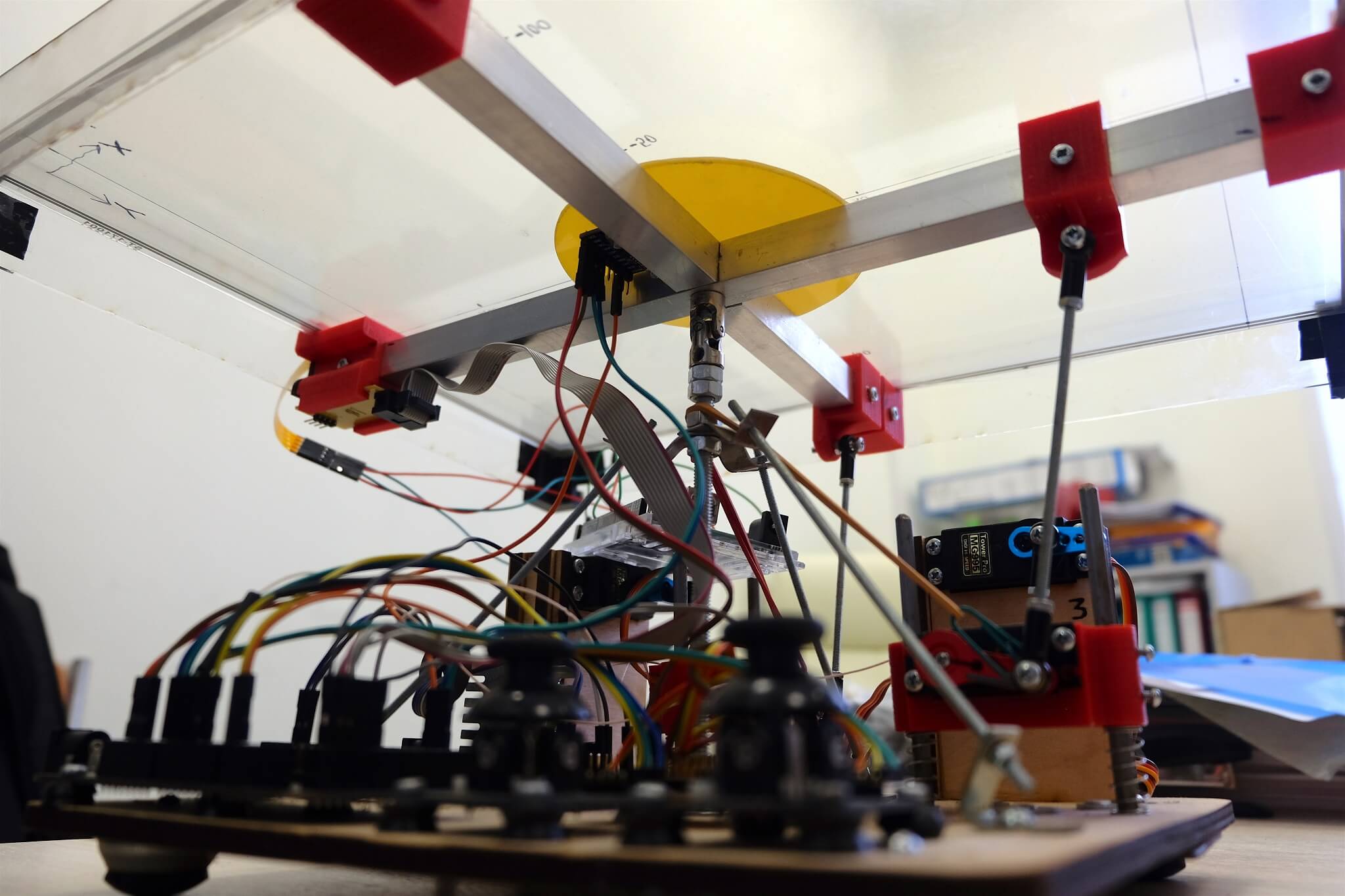
Le complexe robotique se compose d'une plate-forme rectangulaire avec un substrat de capteur résistif qui détermine les coordonnées de la balle. Les arbres de transmission y sont fixés à l'aide d'un joint pivotant. Ces entraînements modifient l'angle de la plate-forme en fonction des signaux de contrôle reçus de l'ordinateur via USB et ne permettent pas à la balle de rouler.
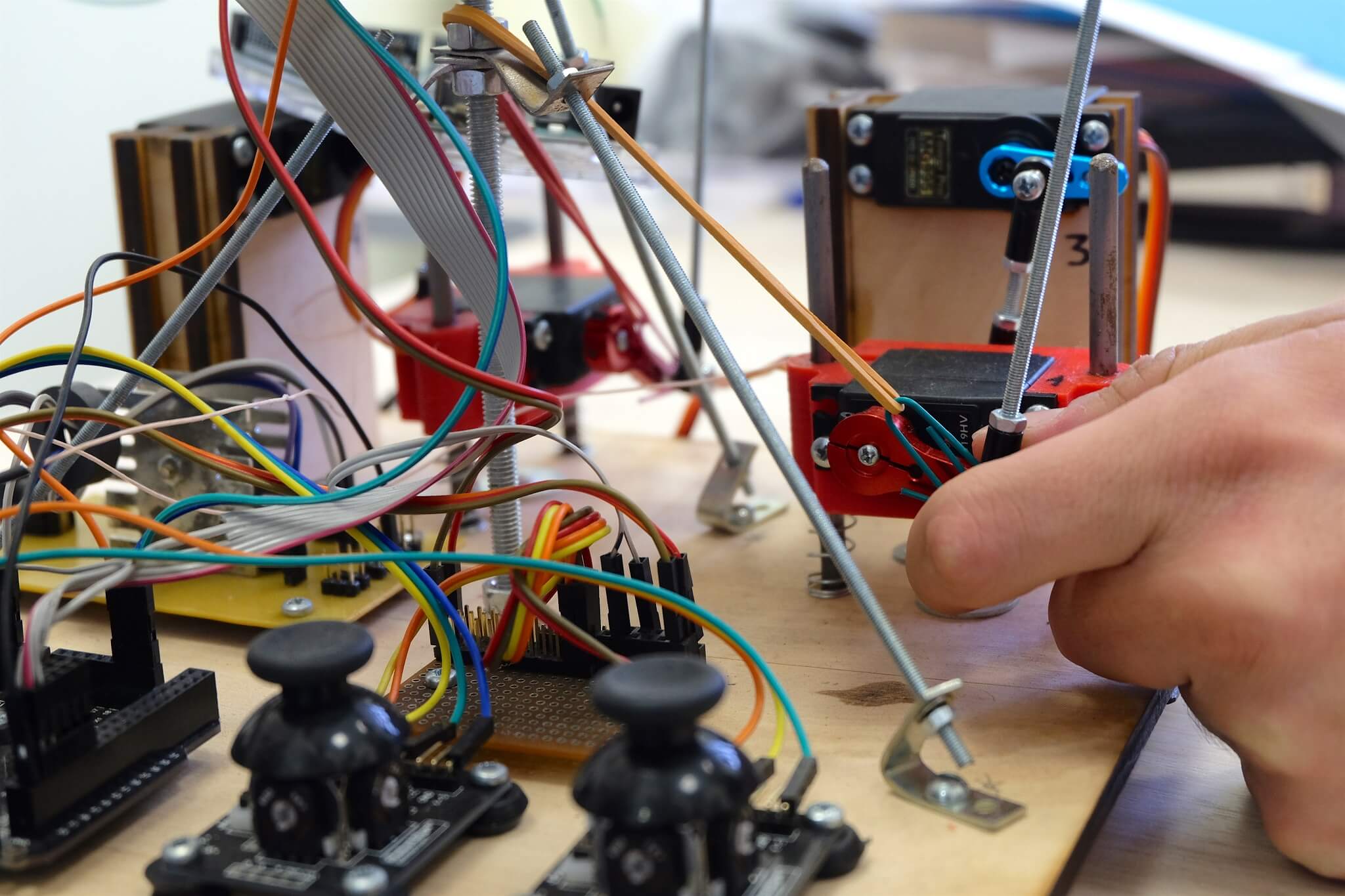
Le complexe dispose de servos supplémentaires chargés de compenser les perturbations. Pour le fonctionnement de ces entraînements, le personnel du laboratoire a développé des algorithmes spéciaux qui «atténuent» divers types d'interférences, telles que les vibrations ou le vent.
En outre, il existe une installation de recherche
KUKA youBot dans le parc de robots du laboratoire, qui est un bras robotisé à cinq liens monté sur une plate-forme mobile avec des roues omnidirectionnelles.

KUKA youBot a testé
des algorithmes de
contrôle adaptatif pour suivre une cible en mouvement . Ils utilisent un système de vision basé sur une caméra numérique et des procédures de traitement vidéo. La base de ce projet est la recherche dans le domaine du contrôle adaptatif des systèmes non linéaires, menée par le personnel de laboratoire.
Des algorithmes de contrôle sont utilisés pour compenser les influences externes agissant sur les liaisons du robot. En conséquence, la machine est capable de maintenir l'outil de travail à un point fixe dans l'espace et de le déplacer de manière stable le long d'une trajectoire donnée.
Un exemple de projet mis en œuvre sur la base du robot KUKA youBot est une
sensation de moment de force sans capteur . En collaboration avec la société britannique TRA Robotics, nous avons développé un algorithme qui nous permet d'évaluer la force d'interaction entre l'outil de travail et l'environnement sans capteurs de couple coûteux. Cela a permis au robot d'effectuer des opérations plus complexes sans recourir à des systèmes externes.

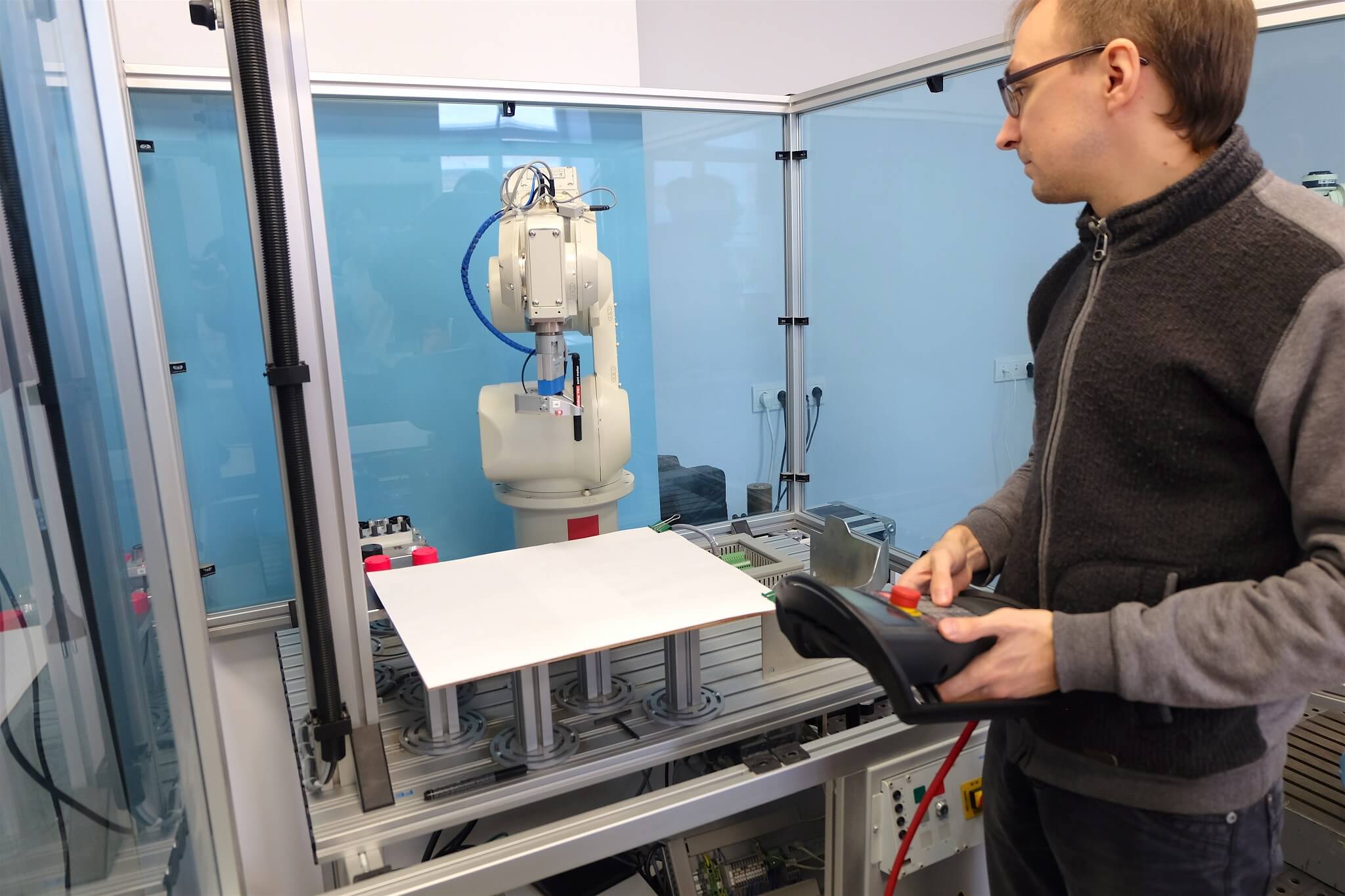
Un autre exemple d'installation robotique dans un laboratoire est la
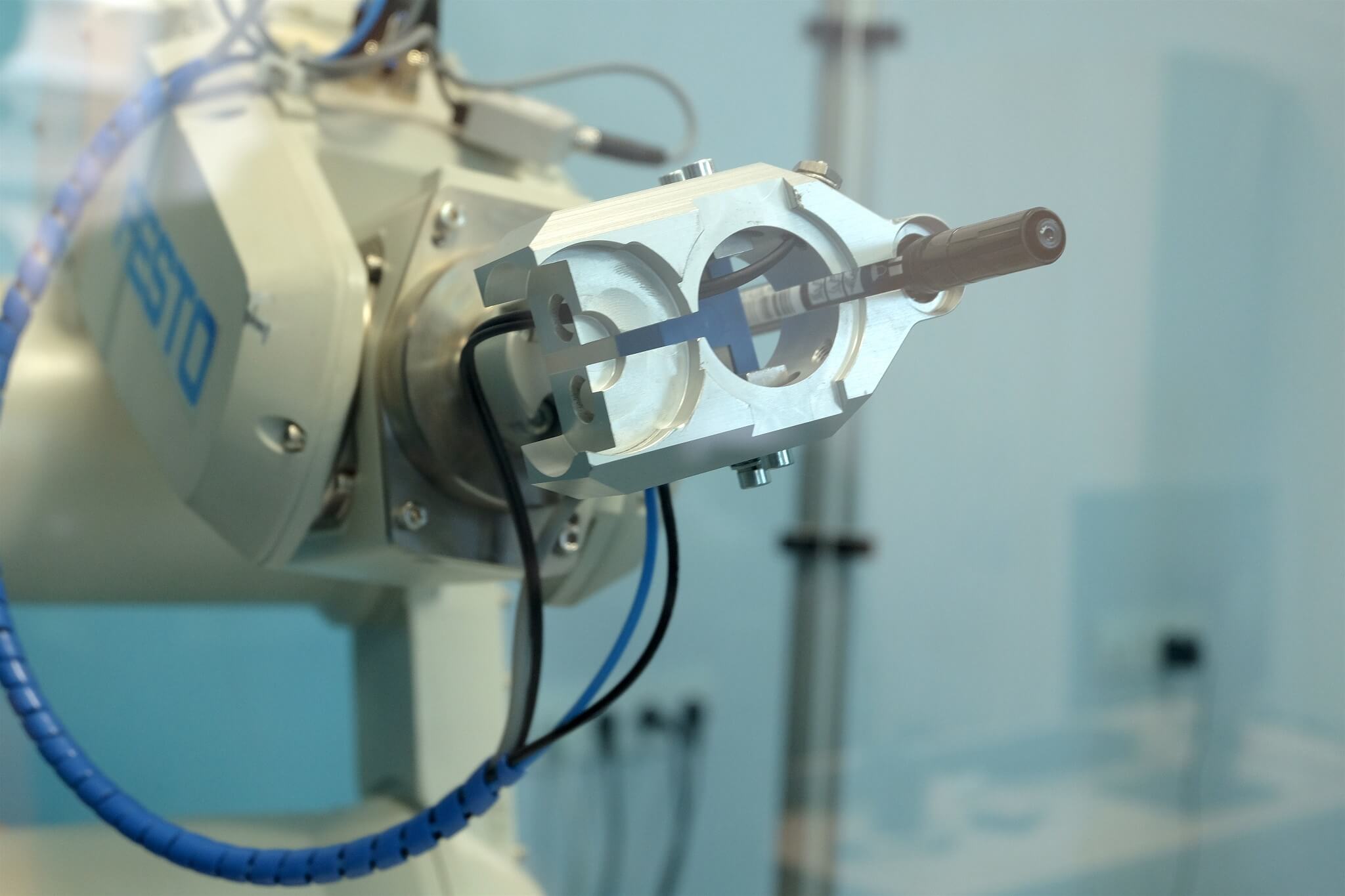
FESTO Robot Vision Cell . Ce complexe est utilisé pour
simuler des opérations technologiques en production, comme le soudage. Pour mettre en œuvre ce scénario, la tâche de planification du mouvement se pose: un outil de soudage par simulation contourne le contour d'une pièce métallique.
De plus, la cellule est équipée d'un système de vision et est capable de résoudre les tâches de tri des pièces par couleur ou forme.
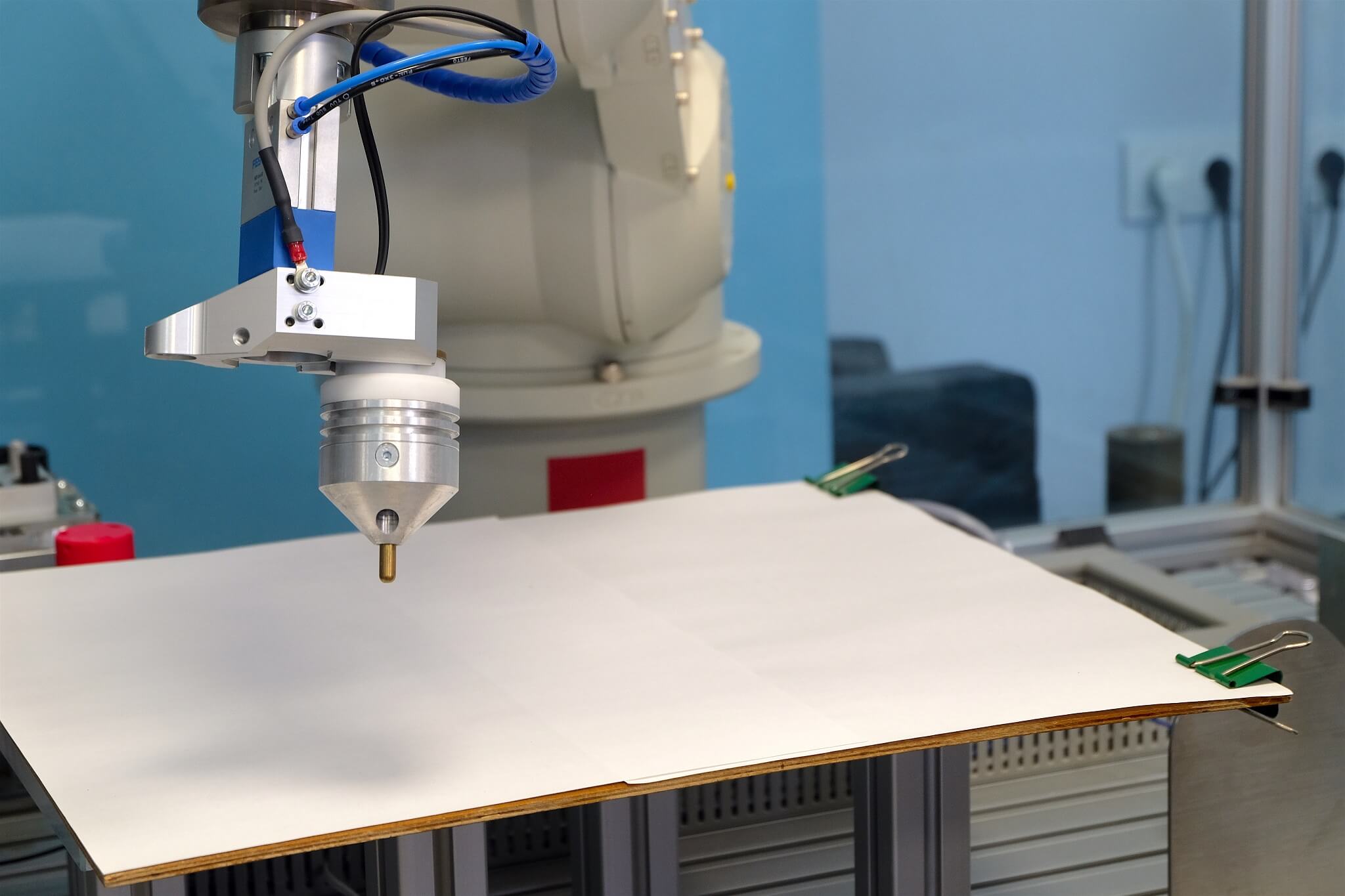
Le projet, basé sur la cellule robotique FESTO Robot Vision Cell avec le robot industriel Mitsubishi RV-3SDB, résout les tâches de planification de mouvement.
Il permet de simplifier le processus d'interaction de l'opérateur avec le contrôleur du robot lors de la programmation de chemins complexes. L'idée est de programmer automatiquement les mouvements de l'outil robot en utilisant les contours indiqués dans le bitmap. Il suffit de télécharger un fichier sur le système, et l'algorithme organisera indépendamment les points de référence nécessaires et compilera le code du programme.
En pratique, la solution résultante peut être utilisée pour la gravure ou le dessin.
Nous avons une
vidéo sur la chaîne dans laquelle notre "artiste robot" a représenté un portrait de A. S. Pouchkine. En outre, la technologie peut être utilisée pour souder des pièces de forme complexe. En fait, c'est un complexe robotique qui résout les problèmes industriels en laboratoire.
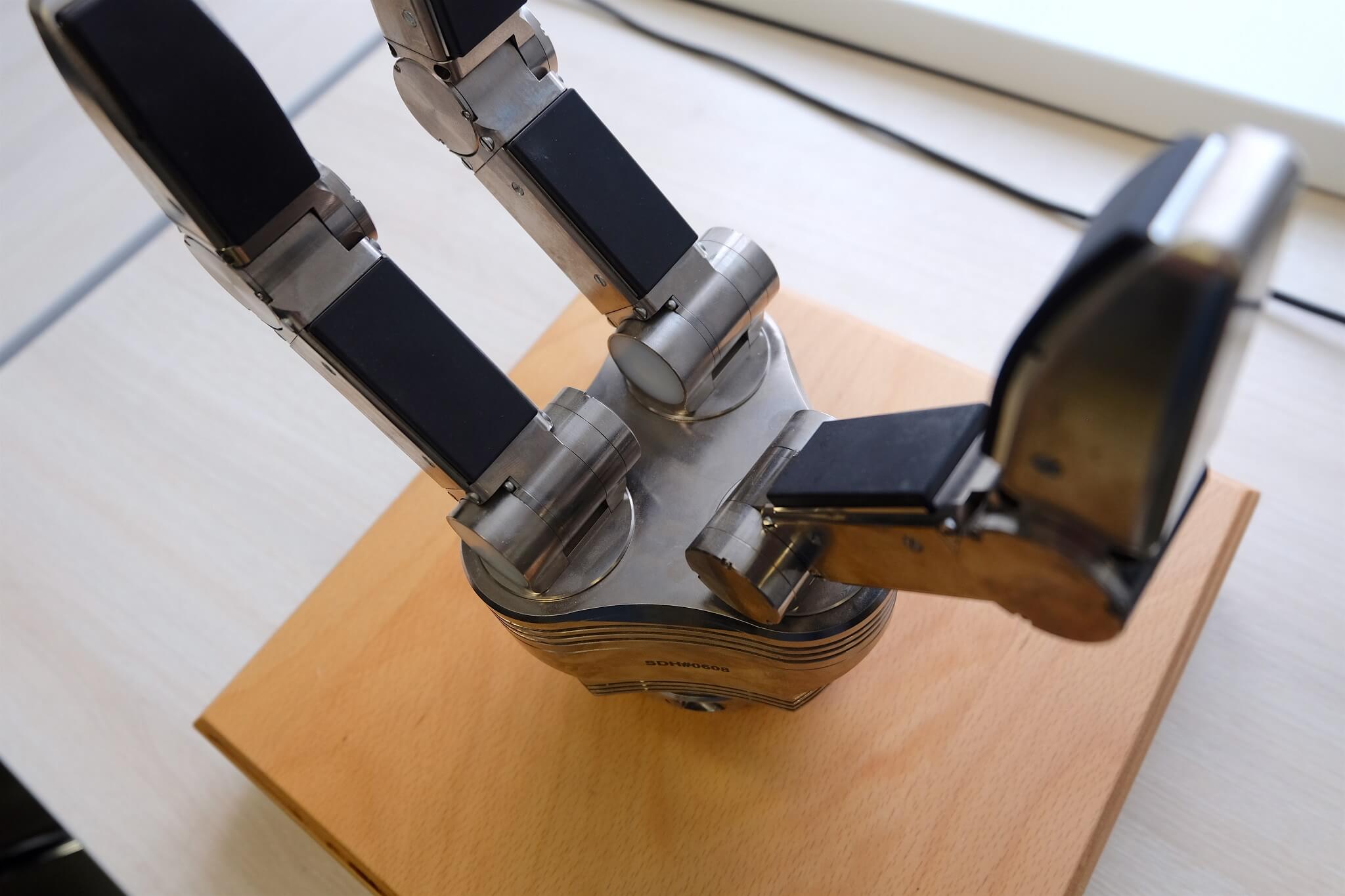
Le laboratoire dispose également d'une pince à trois doigts équipée de capteurs de pression situés sur la surface interne des doigts.
Un tel dispositif permet la manipulation d'objets fragiles lorsqu'il est important de contrôler précisément la force de préhension pour éviter tout dommage.
Le laboratoire dispose d'un
modèle robotique d'un vaisseau de surface , conçu pour tester des systèmes de positionnement dynamique.
Le modèle est équipé de plusieurs entraînements exécutifs, ainsi que d'un matériel de communication radio pour transmettre les signaux de commande.

Il y a une piscine dans la salle de laboratoire, sur laquelle l'opérabilité des algorithmes de contrôle
pour garder la position d'un petit modèle de navire de surface avec compensation des déplacements longitudinaux et transversaux est vérifiée.
Actuellement, il est prévu d'organiser un grand pool de tests à grande échelle avec des scénarios compliqués.

Travailler avec des partenaires et des plans
L'un de nos partenaires est la société britannique TRA Robotics. Ensemble, nous
travaillons à l'amélioration des algorithmes de contrôle des robots industriels pour une entreprise de fabrication numérique. Dans une telle entreprise, l'ensemble du cycle de production: du développement à la fabrication de produits industriels, sera réalisé par des robots et des systèmes d'IA.
Parmi les autres partenaires, citons la société Elektropribor, avec laquelle nous
développons des systèmes mécatroniques et robotiques. Nos étudiants aident la préoccupation dans le domaine de l'instrumentation, le développement de logiciels et les tâches de production.
Nous coopérons également avec General Motors, nous
développons la robotique avec InfoWatch. De plus, le personnel du laboratoire interagit étroitement avec la société
Navis JSC , qui met en œuvre des projets de développement de systèmes de positionnement dynamique pour les navires de surface.
Le
Laboratoire de robotique des jeunes fonctionne sur la base de l'Université ITMO, où les écoliers se préparent pour des compétitions de classe mondiale. Par exemple, en 2017, notre équipe a
remporté l' Olympiade mondiale des robots au Costa Rica et, à l'été 2018, nos élèves ont
remporté deux prix à l'Olympiade panrusse pour les écoliers.
Nous
prévoyons d' attirer davantage de partenaires industriels et de former la jeune génération de scientifiques russes. Peut-être développeront-ils de tels robots qui complètent organiquement le monde des personnes et effectueront des tâches plus routinières et dangereuses dans les entreprises.
Visites photographiques d'autres laboratoires de l'Université ITMO: