
Le rover lunaire Yutu-2 a parcouru 43 mètres le troisième jour lunaire, les ajoutant aux 44 (44,185) mètres passés le premier jour lunaire et 76 mètres (75,815) le deuxième jour lunaire. Le total a couvert 163 mètres en trois jours lunaires. Est-ce beaucoup ou peu? Et pourquoi le rôdeur lunaire parcourt-il une si courte distance dans cette mission?
Documents précédemment publiés sur la mission Chang'e-4: Le troisième jour lunaire de la mission Chang'e-4 est la période du 27 février 2019 au 13 mars 2019:
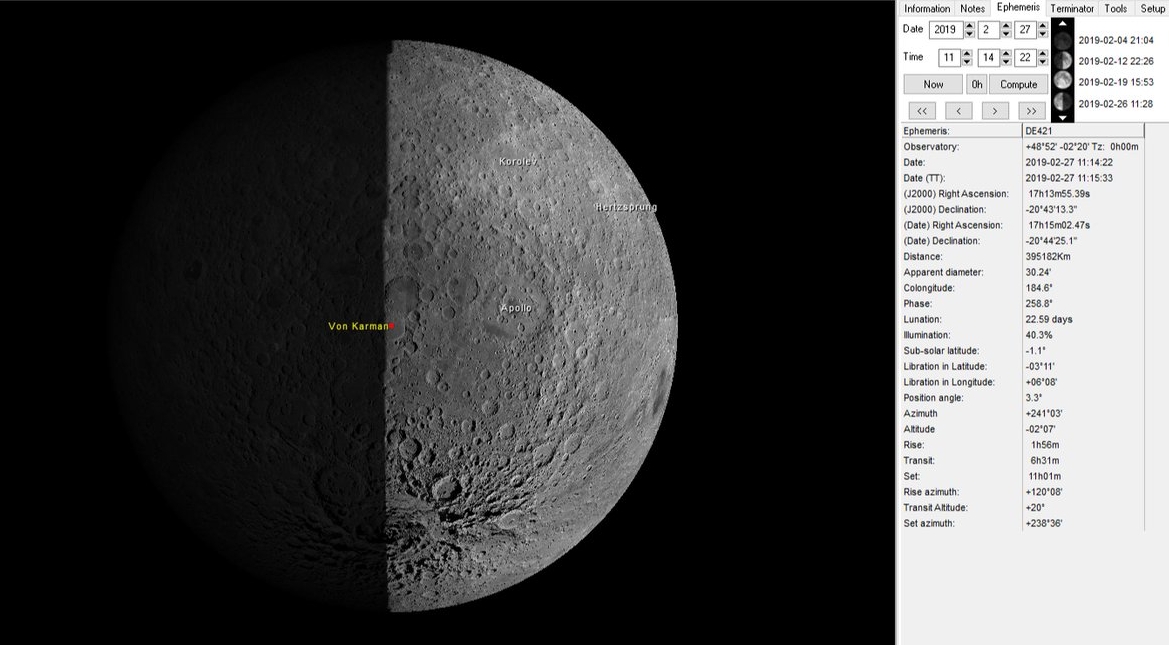
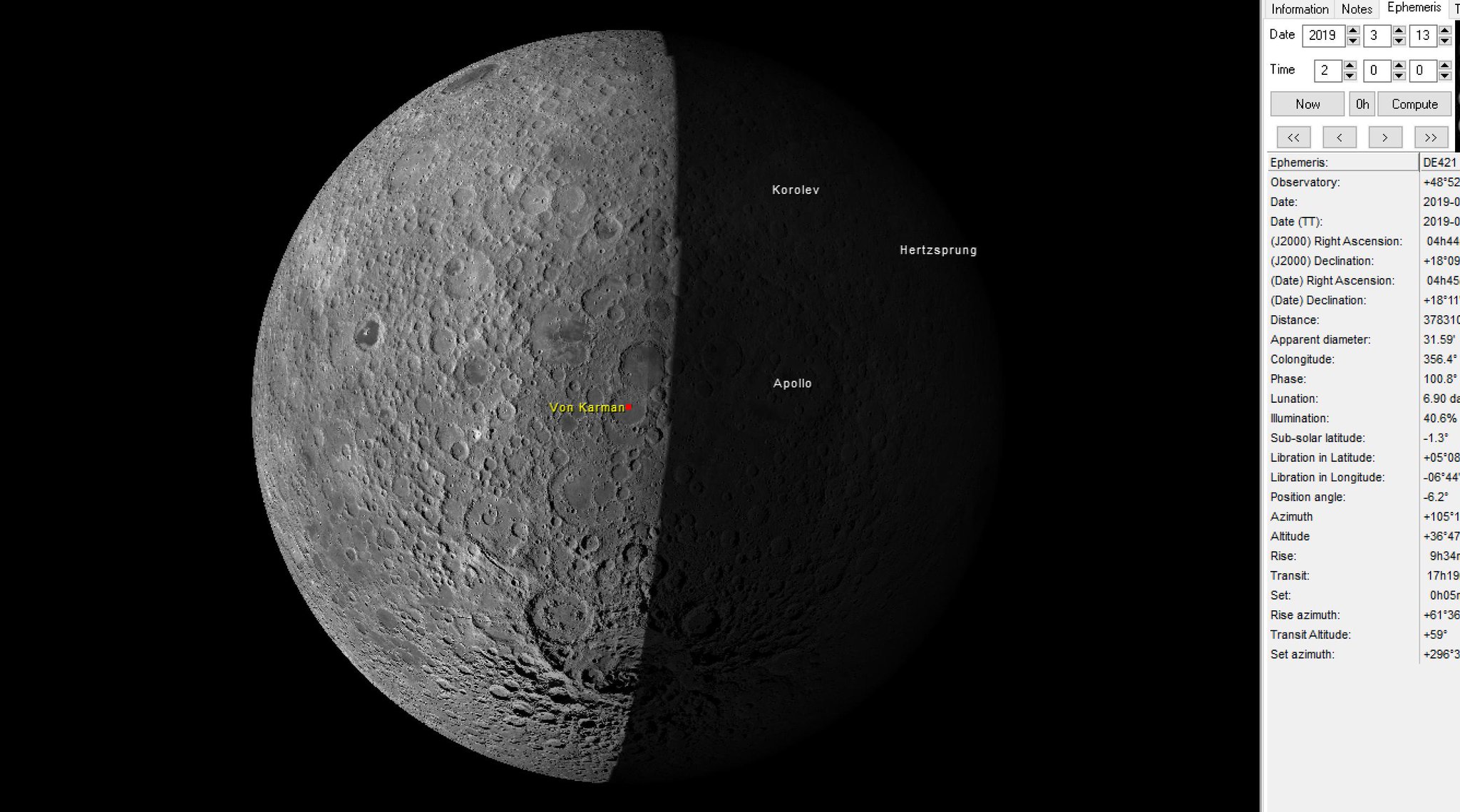
Depuis le 13 mars 2019, l'équipement de l'atterrisseur Chang'e-4 et du rover Yutu-2 a été mis en veille jusqu'à la fin de la troisième nuit lunaire afin de survivre à la période de températures extrêmement basses de l'autre côté de la lune.
Quelle est la surface de l'autre côté de la lune?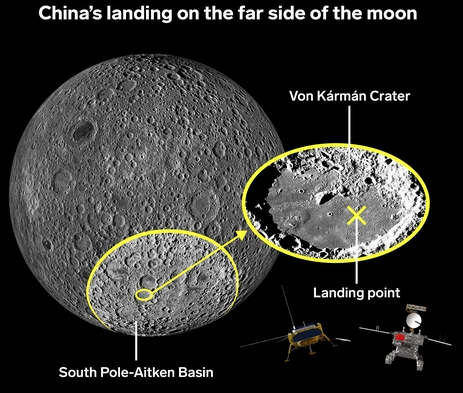
Comme le verso de la Lune a également un relief plus complexe que le côté visible de la Terre, en train de se déplacer le long de la surface, le rover Yutu-2 a rencontré des problèmes moteurs et des interférences plus graves, par rapport à ceux que son prédécesseur avait rencontré auparavant Yutu ", envoyé à la surface lunaire en 2013.
Malheureusement, le premier rover Yutu de la mission Chang'e-3, le 25 janvier 2014, a été immobilisé techniquement (défaillance d'éléments à la suite d'une collision) après avoir franchi 114,8 mètres sur une surface lunaire complexe.
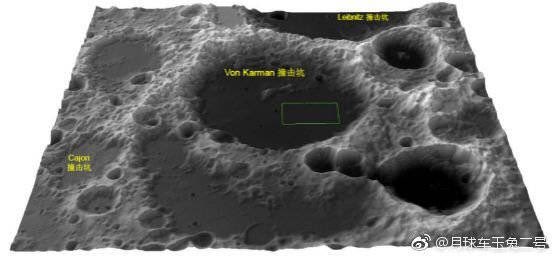
La surface lunaire dans la zone d'atterrissage du module d'atterrissage Chang'e-4 est remplie de plis, de nombreux cailloux et de petits cratères, après avoir effectué chacun de ses petits mouvements, le rover Yutu-2 devrait s'arrêter, photographier la surface autour et renvoyer ces données à la Terre via satellite répéteur.
Les scientifiques, les opérateurs du MCC et les ingénieurs sur Terre traitent ensuite ces données et tracent une nouvelle route le long de laquelle le rover Yutu-2 suivra.
Les antennes du rover Yutu-2 doivent être configurées de sorte qu'elles pointent vers un satellite répéteur pour envoyer et recevoir correctement les signaux de commande, tandis que les panneaux solaires du rover doivent être inclinés de manière optimale pour recevoir une grande quantité de lumière du soleil afin de maximiser la sortie l'électricité au moment du transfert des données.
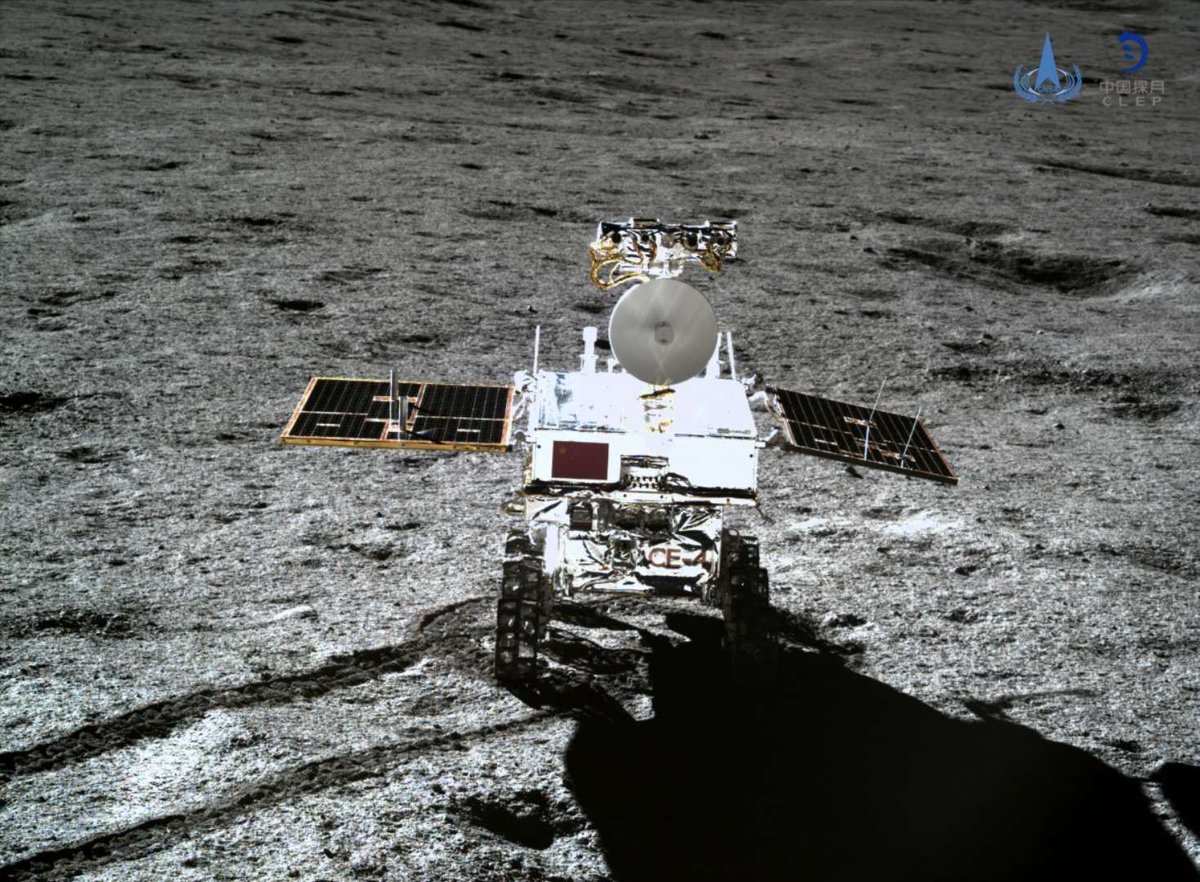
 Rover à six roues "Yutu-2":
Rover à six roues "Yutu-2":- La masse totale du rover est d'environ 140 kg (310 livres);
- capacité de charge - environ 20 kg (44 lb);
- peut se déplacer le long des pentes et possède des capteurs automatiques qui empêchent la collision avec d'autres objets;
- le rover est alimenté en électricité à l'aide de deux panneaux solaires, ce qui permet au rover de fonctionner pendant une journée lunaire;
- la vitesse maximale de 200 mètres par heure (cette vitesse sur la Lune ne peut toujours pas être atteinte - puisque les éléments en surface ne permettront pas d'accélérer et de désactiver le rover plus tôt);
- zone de recherche maximale - 3 mètres carrés. km;
- Temps de travail estimé - 3 mois (2160 heures);
- La distance maximale estimée est de 10 km.
À l'heure actuelle, 70 jours (1680 heures) se sont écoulés depuis l'atterrissage du rover Yutu-2 sur la surface lunaire et 97 jours (2328 heures) après le lancement du rover Yutu-2 depuis le cosmodrome de Sichan dans le cadre de la mission Chang'e-4 sur la Lune.
En fait, le rover Yutu-2 a déjà calculé sa durée de vie estimée, mais en cas de `` réveil '' réussi après le sommeil le 27 mars 2019, il est prévu qu'il continuera de mener des recherches de surface lors de son quatrième jour lunaire.
Mais combien ses capacités en termes de capacité de travail sont suffisantes dépassent déjà la norme de conception et les problèmes ou les pannes dans les composants et les systèmes commenceront, car de grandes chutes de température, les radiations, la pollution et d'autres facteurs externes lunaires affecteront plus fortement ses caractéristiques toutes les heures.
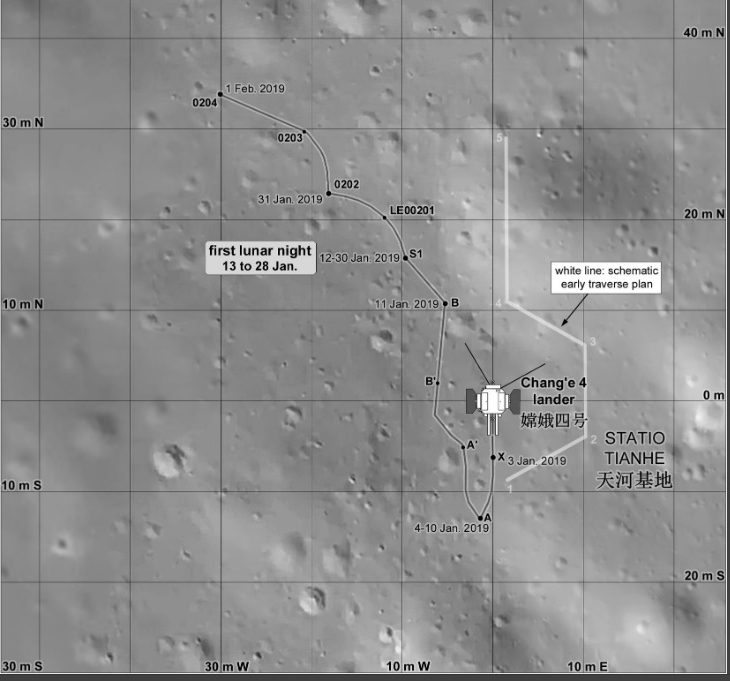
La trajectoire du rover "Yutu-2" le premier jour lunaire et une partie du deuxième jour lunaire:
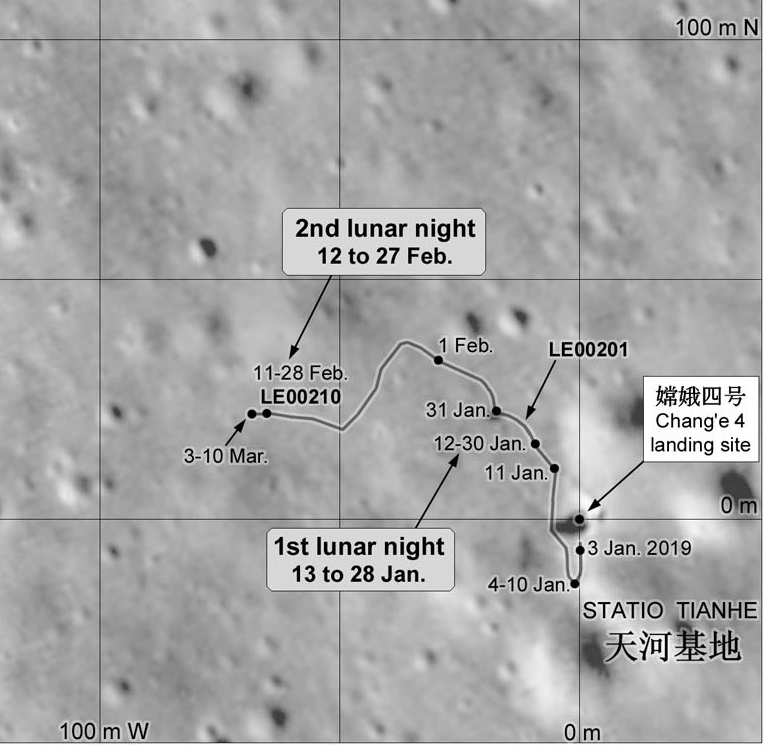
Vous pouvez vérifier la photo du site d'atterrissage, qui a fait la sonde NASA LRO à partir d'une hauteur de 82 kilomètres, une résolution de 0,85 mètres (33 pouces) par pixel:

À l'heure actuelle, le rover Yutu-2 est situé à plus de 80 mètres en diagonale du module d'atterrissage Chang'e-4 et a parcouru 163 mètres après l'atterrissage.
 Pourquoi le rover Yutu-2 a-t-il roulé si peu?
Pourquoi le rover Yutu-2 a-t-il roulé si peu?Tout d'abord, c'est une «peur» d'immobiliser le rover Yuta-2 (et de ne pas répéter le sort du premier rover Yuta), par conséquent, le rover Yuta-2 doit se déplacer autour de la surface de la Lune, en évitant soigneusement les obstacles. Chaque centimètre de son mouvement doit être fait avec soin et correctement. Dans le MCC de la mission Chang'e-4, ils essaient d'éviter une situation dans laquelle le rover Yutu-2 se renverse, ce qui signifie qu'il ne pourra plus retourner à sa position de travail. Les panneaux solaires sur les côtés du rover lunaire Yutu-2 sont très fragiles, ils peuvent se fissurer ou devenir poussiéreux après une chute, ce qui les rendra inutilisables.
Deuxièmement, la face cachée de la Lune est plus susceptible de tomber dans les météorites, donc le terrain y est très compliqué, sur la surface lunaire dans la zone d'atterrissage, il y a beaucoup de petits cratères et indentations qui doivent être encerclés autant que possible, mais vous devez toujours avancer à la recherche de ceux que vous devez étudier éléments de surface - grosses pierres et formations. Et leur recherche et recherche de différentes formations sont également des arrêts forcés nécessaires pour mener des recherches en un seul endroit avec un temps d'arrêt long.
Ainsi, le premier et le deuxième jour lunaire, en utilisant les données des caméras embarquées du rover Yutu-2, une carte détaillée de la zone du site d'atterrissage et de l'itinéraire supplémentaire possible du rover a également été finalisée, ce qui s'est avéré être beaucoup plus sinueux que l'itinéraire direct précédemment prévu.
Le troisième jour lunaire, le rover Yutu-2 a atteint un endroit avec des formations intéressantes sur la surface lunaire - des pics nets à la surface, des pierres détachées moyennes et grandes.
Les éléments du paysage à l'arrière de la surface lunaire peuvent être plus anciens que ceux du côté visible, donc l'étude du sol et des pierres à l'arrière peut éclairer davantage l'origine et l'évolution de la lune.
Qui contrôle le rover Yutu-2?La télémétrie, les données des caméras et des équipements scientifiques, les équipes de contrôle et la surveillance 24h / 24 des paramètres du rover Yutu-2 sont la prérogative des ingénieurs du centre de contrôle aérospatial de l'Académie chinoise des technologies spatiales.
En Chine, la lune est traditionnellement associée aux femmes, le programme d'exploration de la lune chinoise porte également le nom de la déesse de la lune Chang'e, qui met l'accent sur la contribution des femmes scientifiques et ingénieurs au développement de la recherche spatiale.
Dans une légende chinoise, une fille nommée Changye s'est envolée vers la lune et y est devenue une déesse, mais elle ne peut pas retourner sur Terre pour retrouver son mari.
Les filles-ingénieurs du centre de contrôle aérospatial de l'Académie chinoise de technologie spatiale sont plus chanceuses - beaucoup d'entre elles ont la possibilité de voler "virtuellement" sur la lune et d'être simultanément sur Terre avec leurs proches.
Il s'avère que les femmes de l'équipe d'ingénierie pour gérer et contrôler le rover Yutu-2 ont un sens des responsabilités et de la persévérance plus fort que beaucoup de leurs collègues masculins, elles sont plus exigeantes et attentives aux moindres détails dans le processus de travail avec le rover Yutu-2 . Par conséquent, parmi le groupe d'ingénieurs-opérateurs du rover "Yutu-2", ils peuvent montrer le maximum de talents scientifiques et d'ingénierie dans leur travail.
Vérification des données de télémétrie avec un collègue:

Opérateur de poste de travail mobile "Yutu-2":

Et maintenant, revenons au rover Yut-2.
Il y a plus de trois milliards d'années, l'arrière de la lune a été bombardé par de gros astéroïdes et météorites, ce qui a provoqué un changement global à sa surface, des traces de ce processus sont à l'étude par le rover Yutu-2.
Les caméras embarquées du rover Yutu-2 sont fixes, pour obtenir les images nécessaires, il est nécessaire d'effectuer un mouvement précis et un réglage de la position horizontale, ainsi qu'une compensation de l'angle d'inclinaison du rover lui-même, ce qui prend beaucoup de temps aux opérateurs du MCC. Après tout, la surface dans la zone d'atterrissage du rover Yutu-2 est jonchée de cratères de différentes tailles, ce qui rend très difficile de se déplacer en toute sécurité.
Il s'avère que le rover Yutu-2 est capable de contourner automatiquement certains obstacles, s'il y a une grosse pierre ou un cratère devant lui, il peut s'arrêter tout seul et planifier un nouvel itinéraire pour contourner cet endroit, dans ce cas, l'opérateur du MCC peut enregistrer cette situation et reconstruire le planifié route vers un nouveau.
Le rover Yutu-2 peut également gravir de petites pentes et traverser une surface rocheuse. Mais le front principal de son travail est le mouvement sur une surface horizontale plate et un sol lunaire.
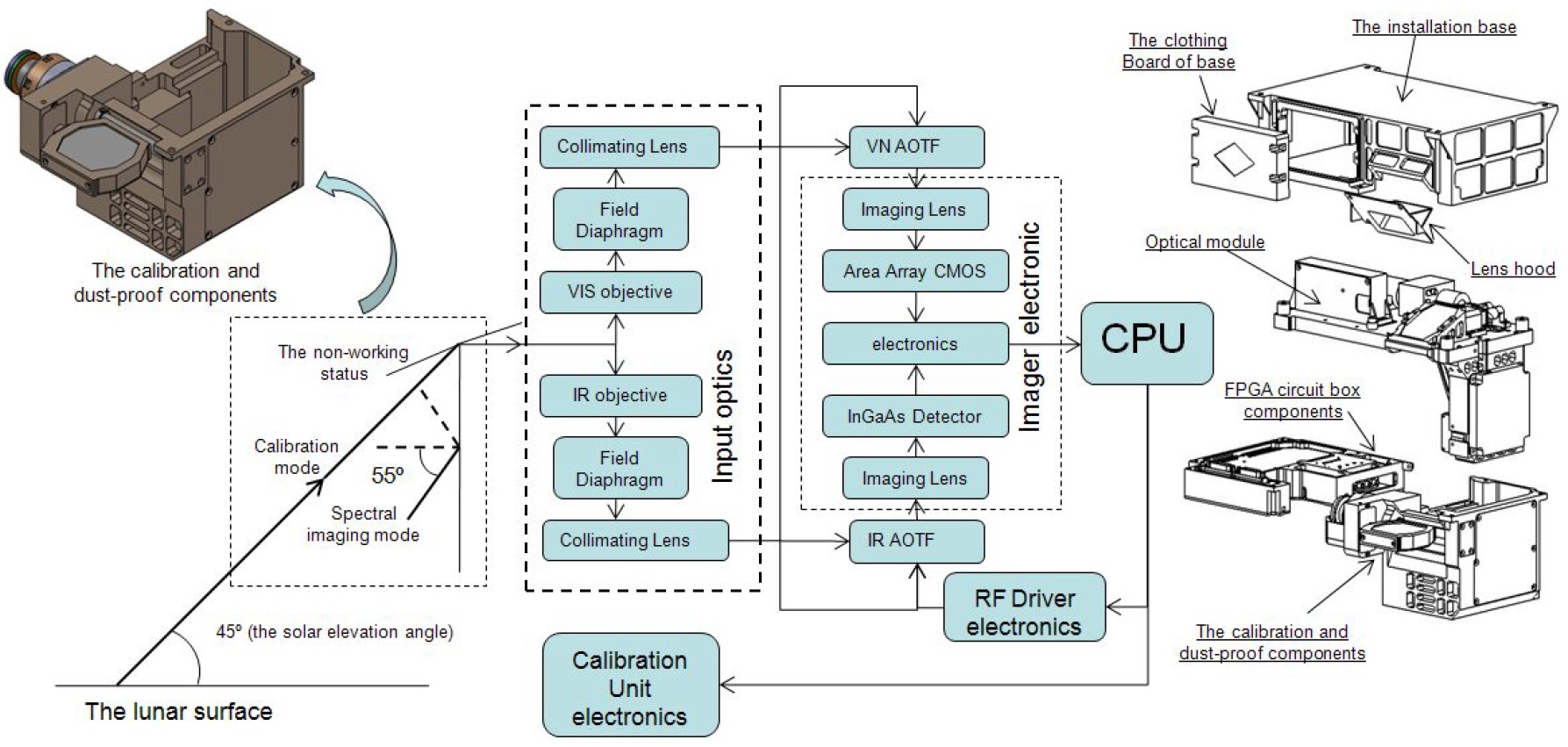
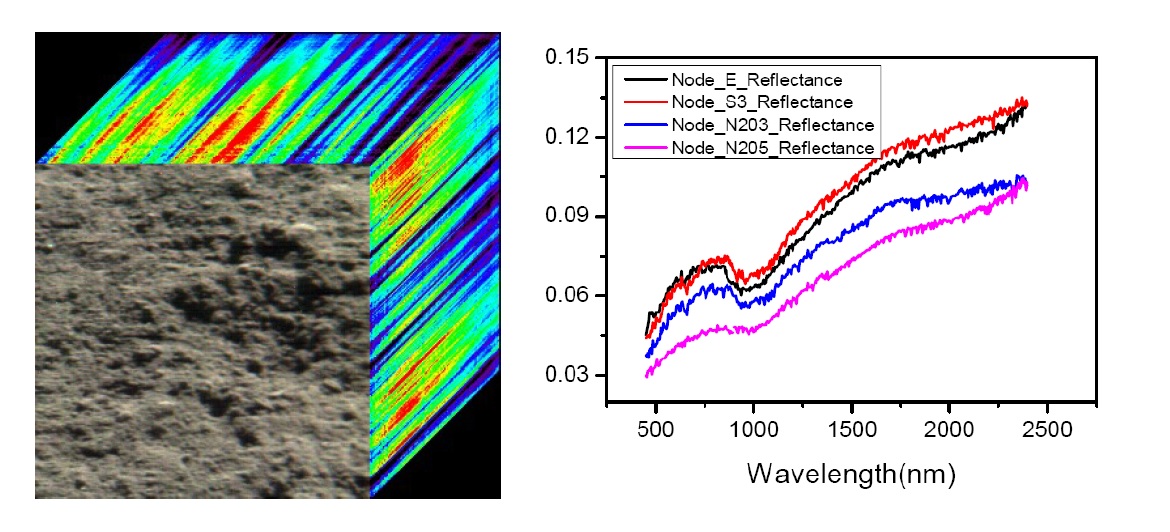
Alors, quel type d'appareil ce «spectromètre VNIS» est-il installé à bord du rover Yutu-2?Le spectromètre infrarouge lunaire VNIS (le spectromètre d'imagerie visible et proche infrarouge) a été développé à l'Institut de physique technique de Shanghai de l'Académie chinoise des sciences.
Le spectromètre utilise des filtres accordables acousto-optiques non colinéaires, il se compose d'un spectromètre vidéo VIS / NIR (0,45–0,95 μm) et d'un spectromètre IR à ondes courtes (0,9–2,4 μm), et il comprend également une unité d'étalonnage avec protection de la poussière et de la pollution.
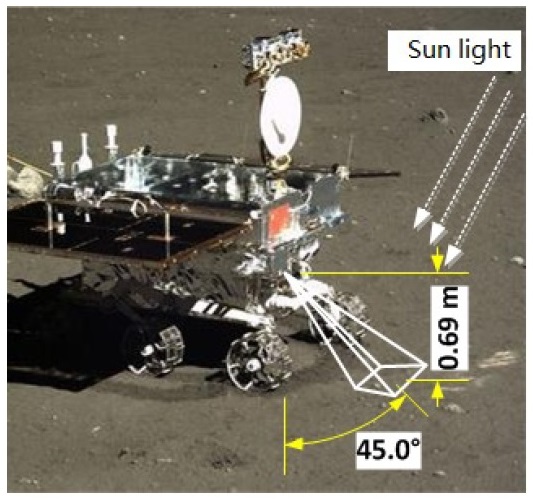
Le spectromètre est installé à l'avant à bord du rover Yutu-2, a les restrictions suivantes sur le positionnement et le travail avec le matériau lunaire:
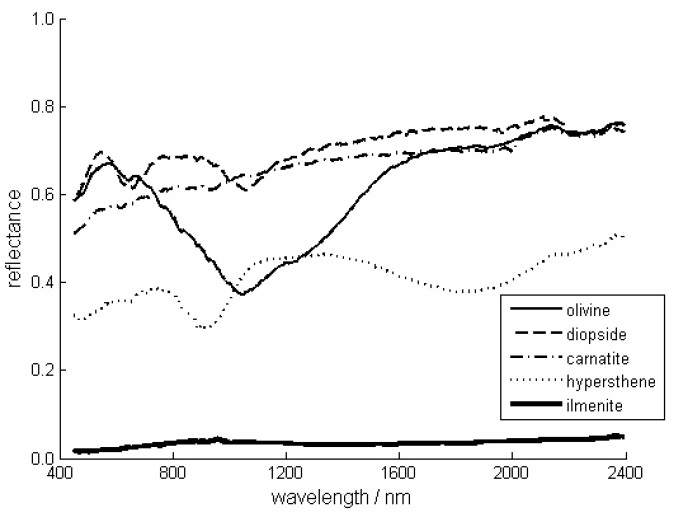
Les minéraux, tels que le pyroxène, le plagioclase, l'olivine et l'ilménite, qui constituent la plupart des roches de surface lunaires, ont des caractéristiques spectrales distinctes:
Le schéma structurel du spectromètre:
Les principales caractéristiques techniques du spectromètre:

Aspect du spectromètre:

Les dimensions géométriques de la fenêtre de détection:
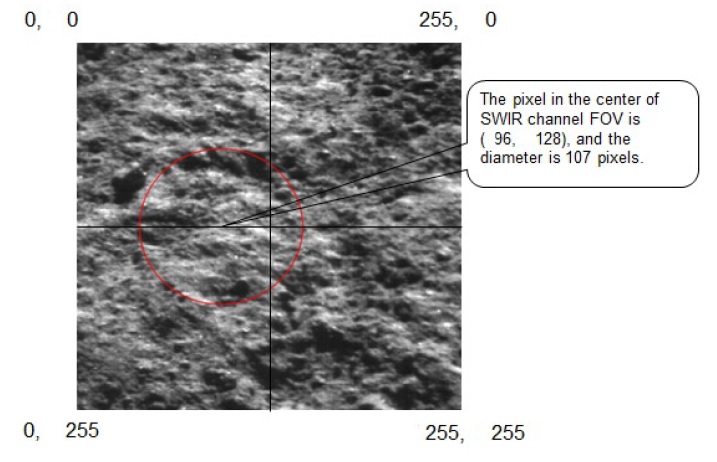
Données obtenues par spectromètre:
Le troisième jour lunaire, le rover Yutu-2 a été engagé dans l'obtention de données scientifiques à l'aide du spectromètre stationnaire embarqué VNIS (spectromètre d'imagerie visible et proche infrarouge), dont le champ de vision du capteur n'est que de quelques centimètres de large, il est donc nécessaire de positionner avec précision et précision le rover " Yut-2 ”de sorte que“ l'œil ”du spectromètre puisse être amené à la zone souhaitée de la surface lunaire pour recevoir les données correctes à partir de la distance optimale.
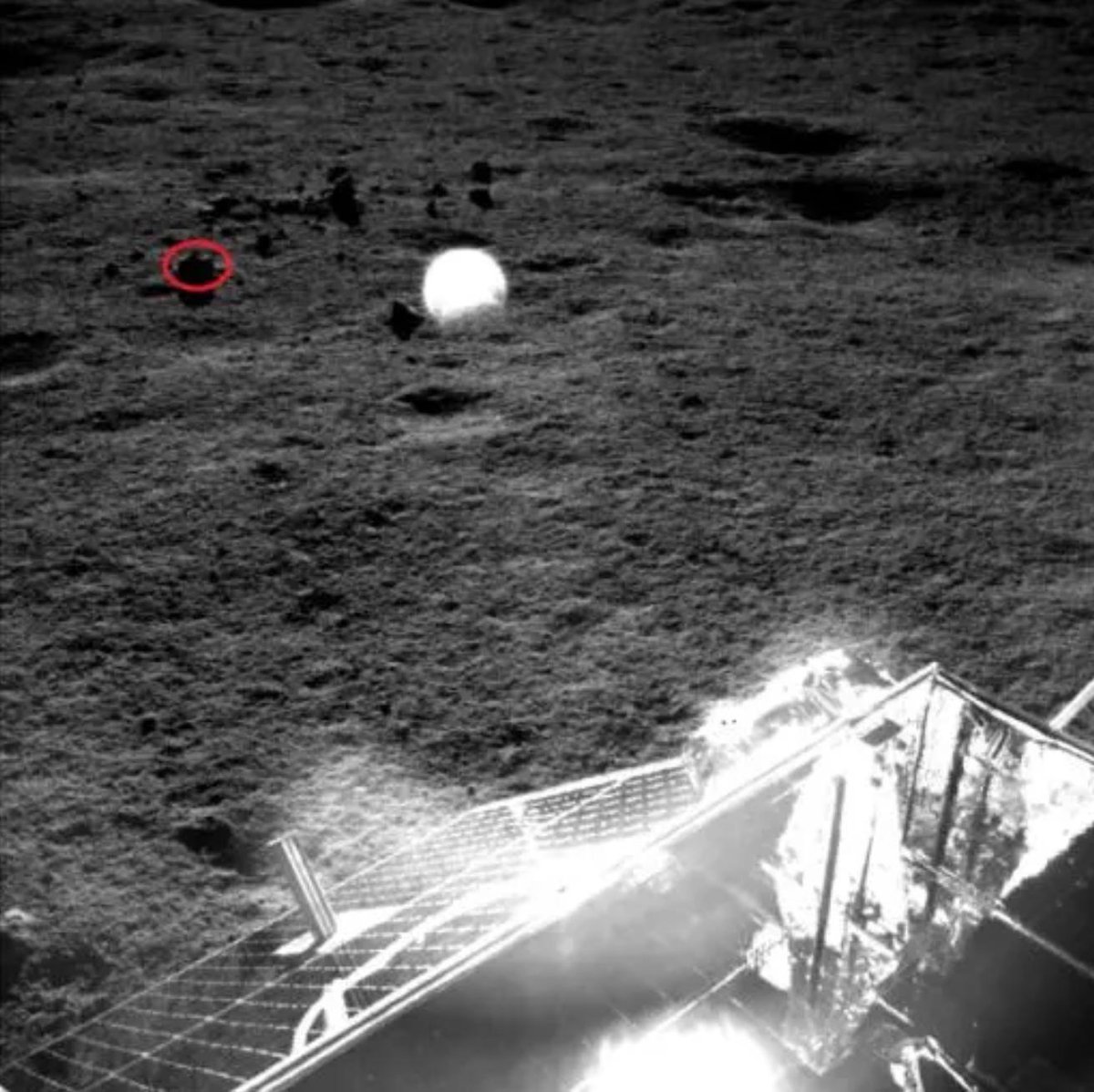
Après une courte marche sur la lune, le rover Yut-2 a atteint une clairière de pierre intéressante, au centre de laquelle une grosse pierre d'un diamètre de 20 centimètres a été découverte. Les scientifiques se sont immédiatement intéressés à cette découverte, à son origine (météorite, formation lunaire) et au processus d'éducation.
Vue générale du panorama de surface lors de la recherche de pierres:

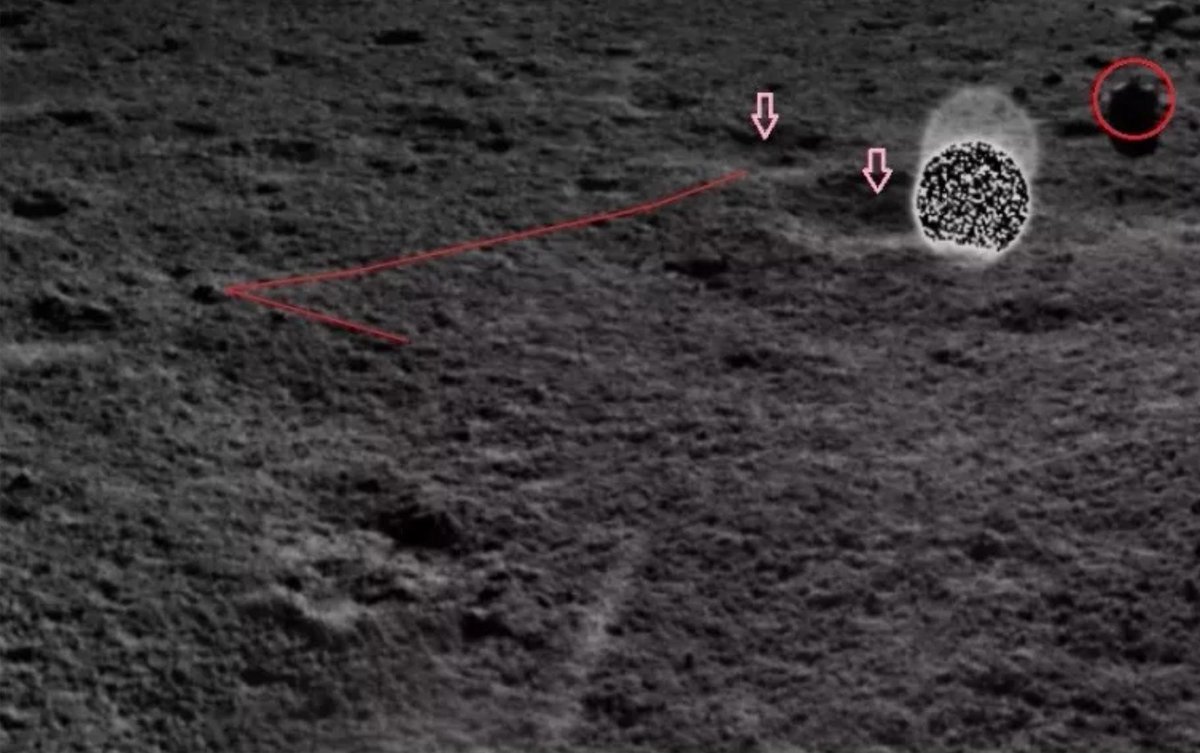
Une surface rocheuse, à une grosse pierre (son diamètre est de 20 centimètres) à une distance de 120 centimètres:

Image agrandie d'une grosse pierre:


Travailler avec un spectromètre:
De plus, les données avec le spectromètre rover Yutu-2 sont transmises au centre de contrôle aérospatial de l'Académie chinoise des technologies spatiales, où elles sont analysées, stockées et seront ouvertes à la communauté scientifique.
Le portail chinois «Système de publication et de collecte de données scientifiques et de recherche sur l'espace lunaire et profond», sur lequel seront publiées les données et images reçues de Chang'e-4 (et des missions antérieures), a également fonctionné.
Chemin d'accès au portail :
http://202.106.152.98:8081/moondata/Le volume de données est également un point intéressant, par exemple, le rover Yut-2, après avoir pris des mesures à l'aide d'un spectromètre à quatre points différents sur la surface lunaire, a transmis un volume de données total de 350 Mo.
Les mesures scientifiques des éléments de la surface lunaire et la transmission des données du rover "Yutu-2" devraient se poursuivre le quatrième jour lunaire.