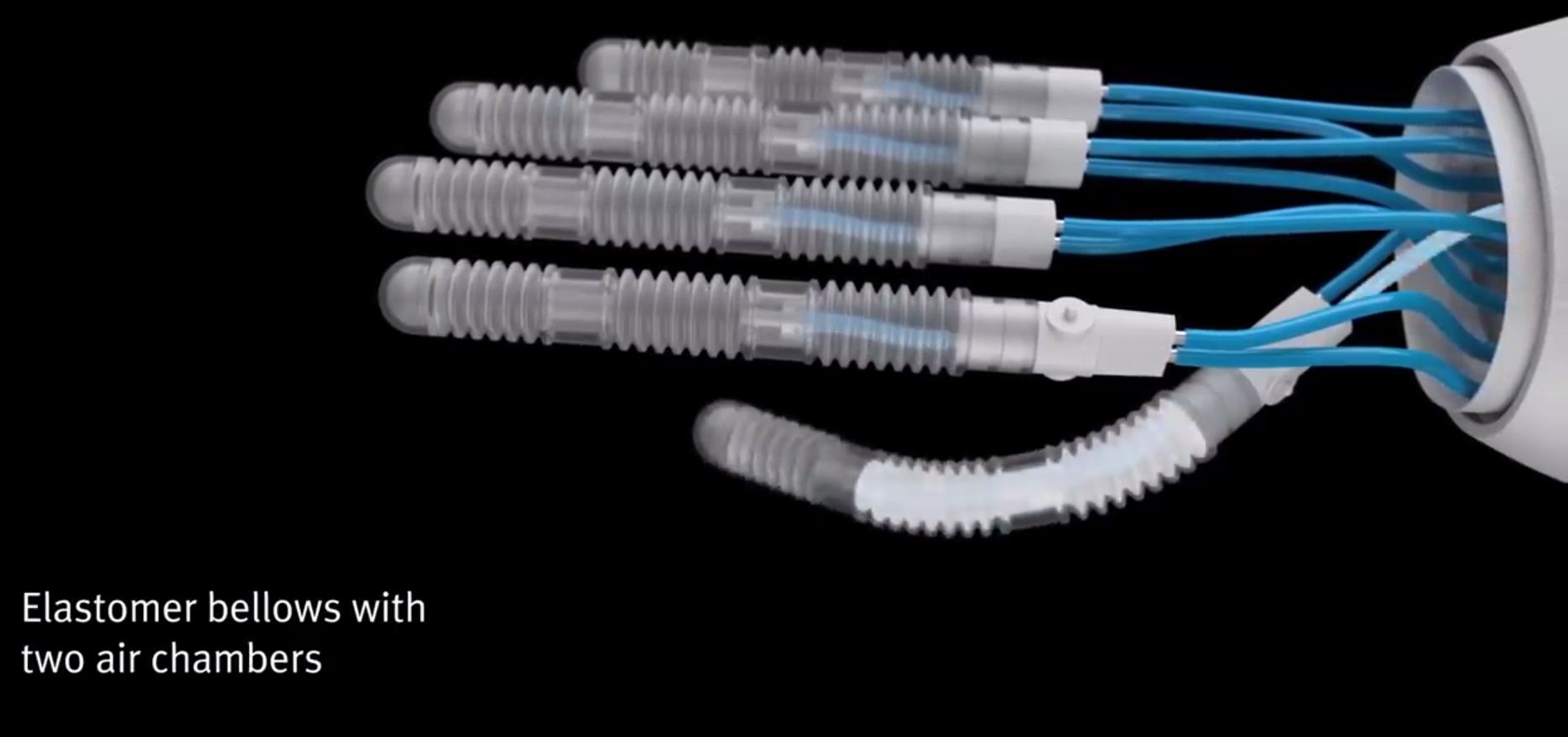
Il n'y a pas de structure squelettique dans cette solution, la main est faite de matériaux souples et flexibles, les phalanges des doigts sont en tissu textile tridimensionnel avec des capteurs tactiles et des conducteurs flexibles qui peuvent être pliés à l'aide de modules pneumatiques. Un nœud avec des valves est installé dans le poignet, qui actionne les éléments de la main, si nécessaire, avec de fins mouvements moteurs.
Les mouvements de BionicSoftHand sont contrôlés par l'intelligence artificielle, capable d'apprendre par essais et erreurs, et après s'adapter à la tâche, effectuer rapidement et de manière autonome les actions nécessaires avec des objets, de la même manière qu'une personne

Lien vers la description du fabricant de la solution
BionicSoftHand ici .
 Le bras robotique BionicSoftHand est équipé de:
Le bras robotique BionicSoftHand est équipé de:- soufflet gonflable, autour duquel se trouve un tissu tridimensionnel fabriqué à partir d'une impression 3D en fibres élastiques, qui se plie avec les mouvements de la main lorsque l'air est introduit dans le soufflet, semblable au travail des muscles et des tendons;
- modules rotatifs pneumatiques;
- terminal de distributeurs pour 24 distributeurs piézoélectriques;
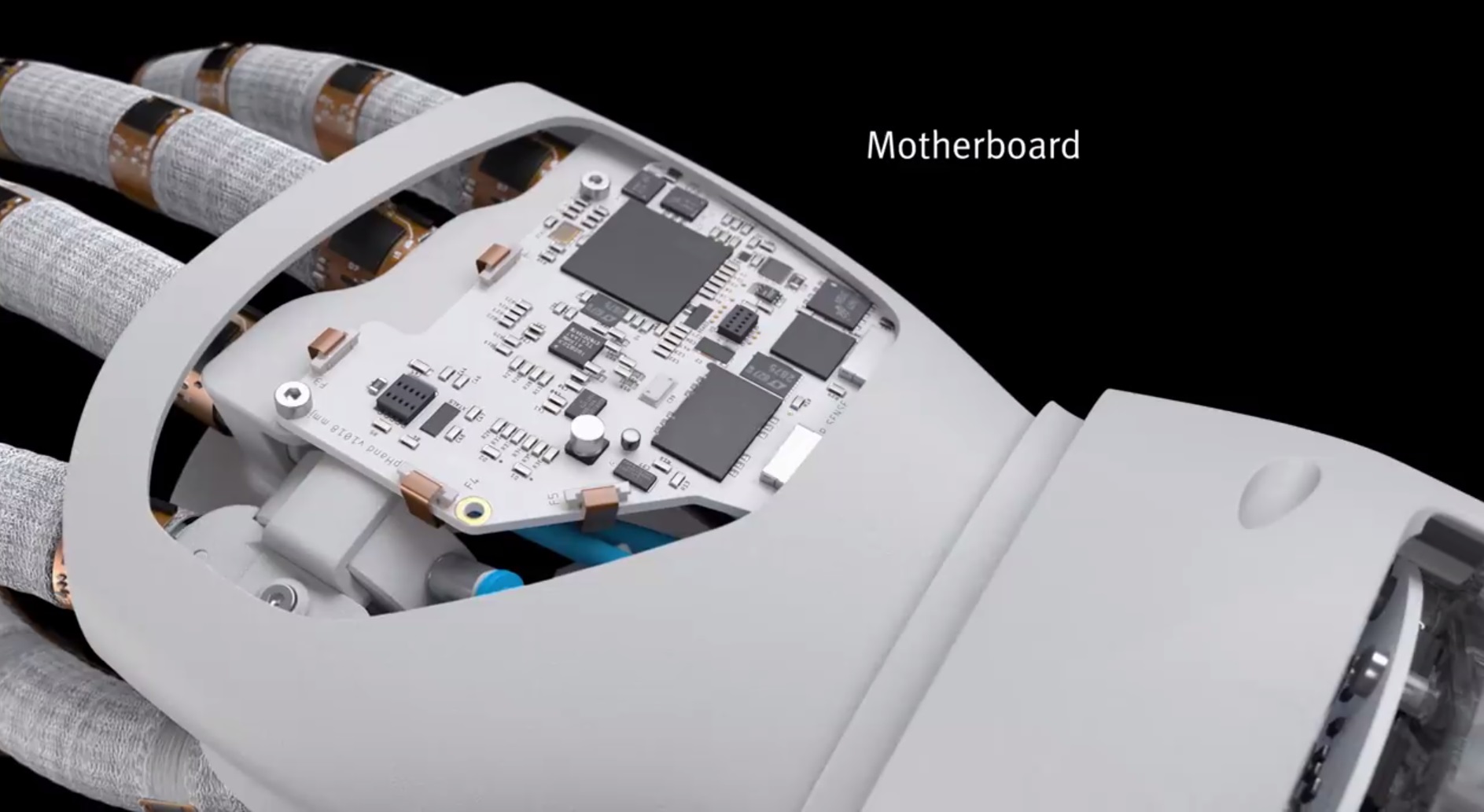
- une carte mère embarquée, y compris pour le contrôle de mouvement autonome;
- des capteurs d'inertie (mouvement) et de force (installés dans les doigts mous), également créés à base de matériaux souples et capables de se plier au moment du mouvement;
- un module d'IA auto-apprenant, capable de calculer indépendamment la meilleure façon d'interagir avec différents objets et d'effectuer diverses actions, et dans les plus brefs délais, de recevoir des données de caméras 3D avec perception de la profondeur pour analyser les objets et les mouvements.
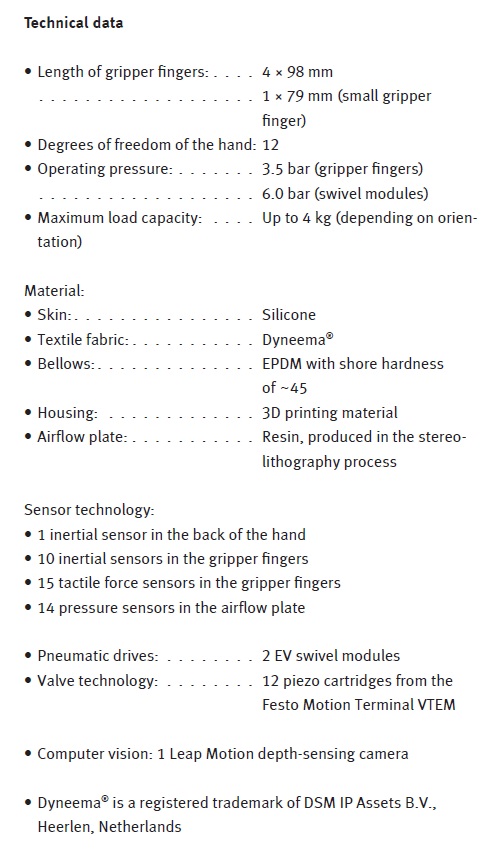
Caractéristiques techniques des composants de l'appareil:


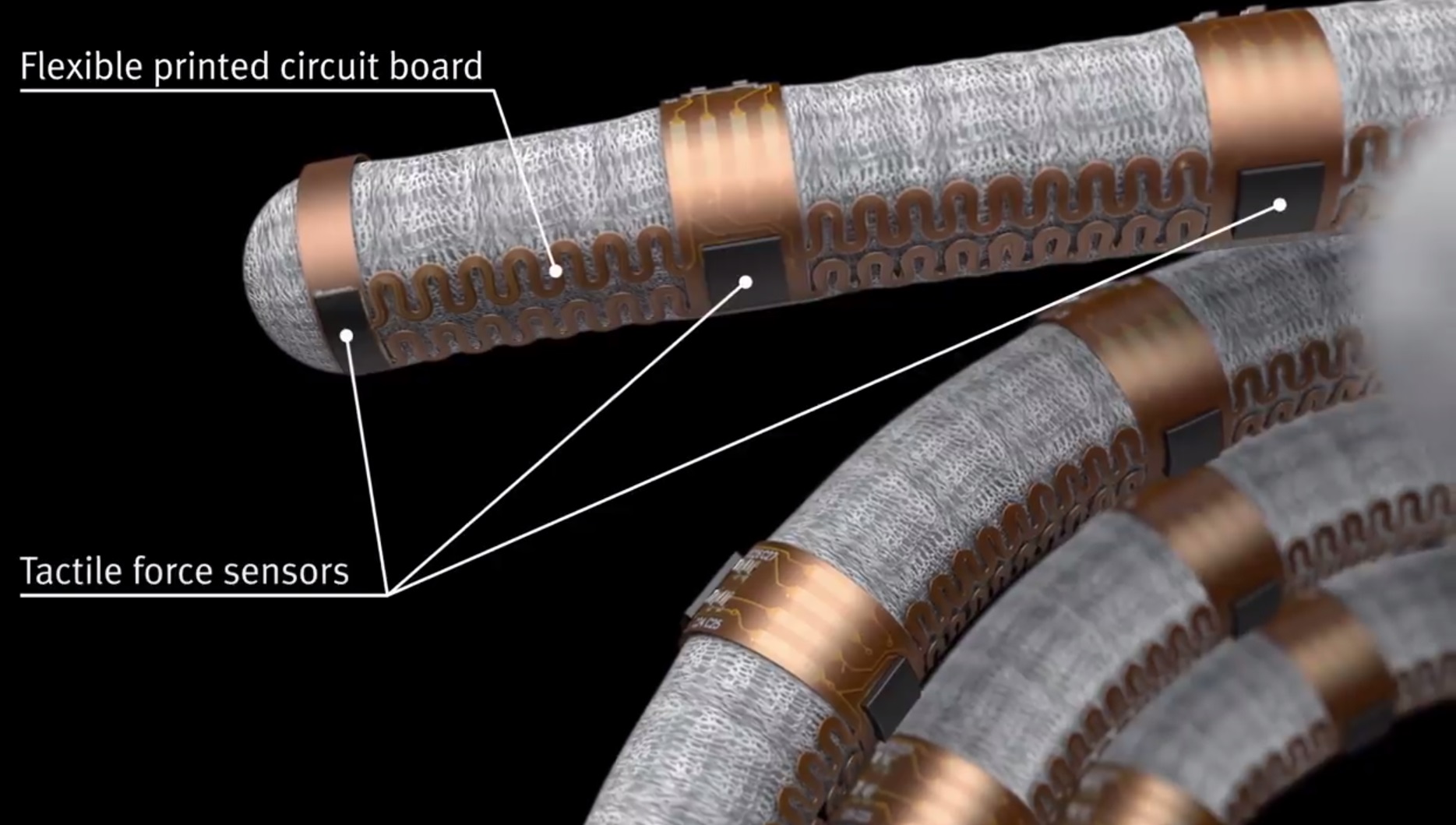





Un tableau de capteurs tactiles sur les doigts de la main fournit des informations aux systèmes de contrôle de la main (avec les composants de l'IA), rendant compte des mouvements de la main et des doigts, ainsi que des méthodes et des mouvements en contact avec différents objets, la même IA analyse les informations pour savoir si elle est correcte un objet est localisé dans la main pour sa manipulation, en utilisant une matrice de perception de contact, imitant le sens du toucher d'une personne. De plus, l'IA calcule quels efforts doivent être faits pour tenir le sujet, quel type de séquence motrice doit être effectuée pour les positions et les mouvements des doigts, la largeur de l'ouverture de la paume, etc.

Initialement, la main BionicSoftHand n'était pas programmée pour des mouvements spécifiques, et l'IA connectée à sa carte de contrôle est entraînée à effectuer des tâches de test en utilisant la technologie d'apprentissage parallèle, créant dans un environnement virtuel, permettant au fil du temps au bras robotique de devenir seulement plus «intelligent», mais pour solutions de nouveaux problèmes pour utiliser des combinaisons de mouvements qui ont déjà été étudiées et vérifiées avec des actions réelles, qui sont ensuite optimisées pour de nouvelles tâches.

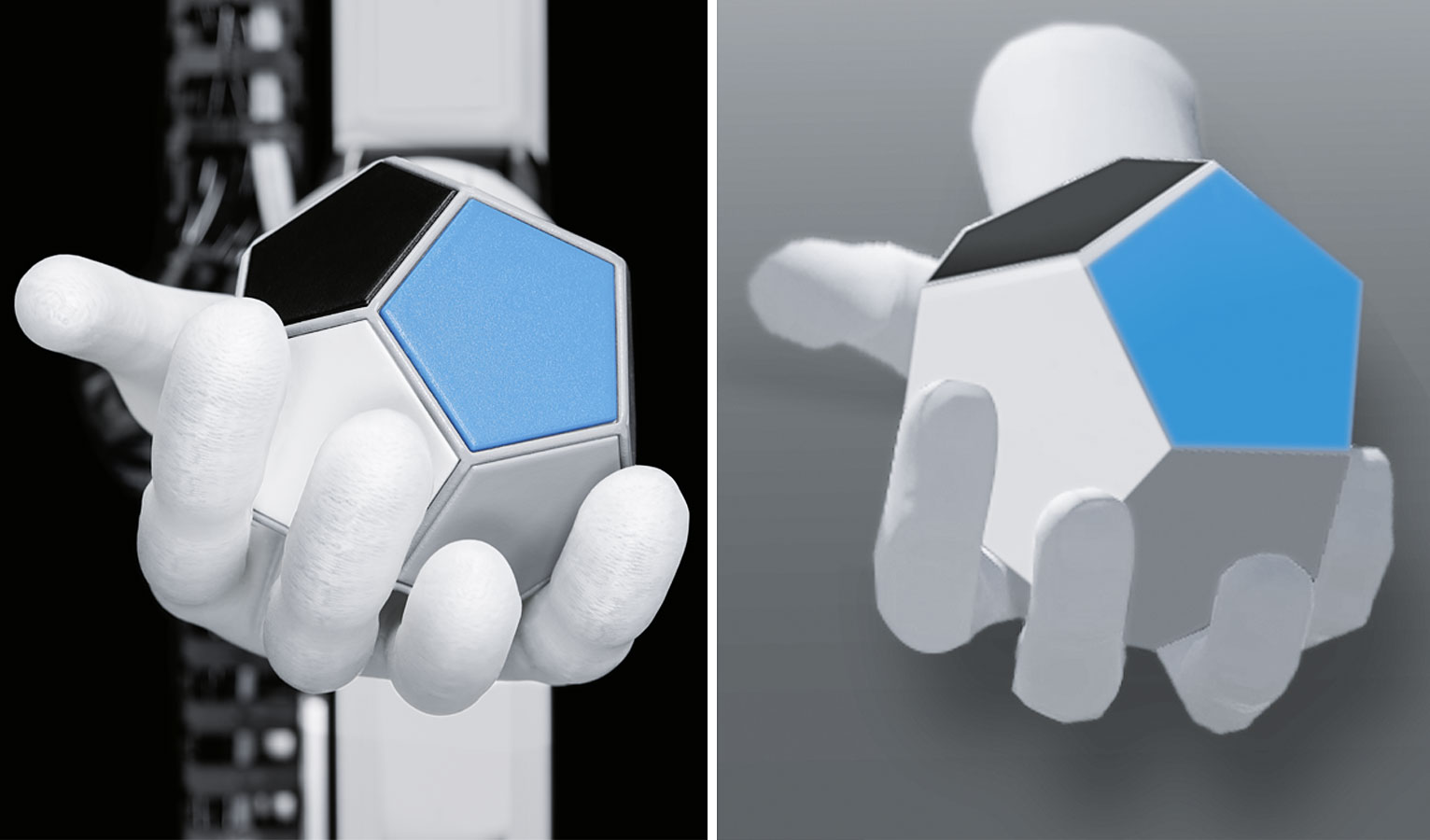

Dans la vidéo de démonstration ci-dessous, les IA avec le bras robotique ont été chargées de déplacer l'objet à 12 faces placé dans la main afin qu'un certain visage se lève, sans expliquer les étapes pour terminer cette tâche.
Tout d'abord, à l'aide d'une caméra 3D avec perception de la profondeur, l'IA crée une copie numérique de l'objet, puis la met dans une simulation virtuelle avec de nombreuses mains virtuelles qui manipulent l'objet jusqu'à ce que la bonne combinaison soit sélectionnée.
Ensuite, l'IA calcule les options pour trouver et effectuer rapidement des actions optimales avec le sujet, puis les exécute en réalité, en contrôlant les éléments de BionicSoftHand.
Composants pour créer de l'électronique Evgeny Veltistov de plus en plus proche de la réalité.