Pour profiter aux gens, les robots doivent apprendre à marcher comme nous.

Pendant de nombreuses décennies, les robots ont pu marcher sur deux jambes. Aujourd'hui, les robots humanoïdes les plus avancés peuvent marcher sur des surfaces planes et en pente, monter et descendre des escaliers et se frayer un chemin sur un terrain accidenté. Certains savent même sauter. Mais, malgré ces progrès, les robots à pattes ne sont toujours pas comparables en termes de dextérité, d'efficacité et de fiabilité avec les personnes et les animaux.
Les robots ambulants existants consomment de l'énergie et passent trop de temps à s'entraîner. Trop souvent, ils échouent et se brisent. Pour devenir les assistants robotiques dont nous rêvons depuis si longtemps, ces machines devront apprendre à marcher comme nous le faisons.
Nous devons absolument créer des robots avec des jambes, car notre monde est conçu pour les jambes. On passe par des goulots d'étranglement, on contourne les obstacles, on monte et descend les escaliers. Il est difficile pour les robots sur roues ou chenilles de se déplacer dans les endroits que nous avons adaptés à notre corps.
Et de nombreux robots humanoïdes ont des jambes qui ressemblent aux nôtres - avec des hanches, des genoux, des chevilles et des pieds. Mais c'est là que s'arrêtent les similitudes. Si, par exemple, nous comparons la force avec laquelle le robot presse la terre avec la même chose chez l'homme, il s'avère que souvent ils sont très différents. La plupart des robots humanoïdes, issus des premiers exemples de bras robotiques industriels, contrôlent les membres afin qu'ils se déplacent avec précision le long de trajectoires prédéterminées. Cependant, se déplacer sur deux jambes nécessite moins de contrôle de position que de contrôle de la force, et implique une large gamme de flexibilité et d'élasticité - connue en robotique comme la conformité, qui vous permet de faire face à des contacts inattendus.
De nombreux groupes de recherche tentent de créer des robots moins rigides qui peuvent se déplacer de manière plus dynamique et humaine. Le plus célèbre de ces projets sera probablement
Atlas de
Boston Dynamics , un humanoïde capable de courir sur des sols durs et mous, de sauter par-dessus des billes et même de faire des backflips. Mais encore une fois, en comparant le mouvement des robots les plus complexes avec les animaux, nous voyons que les machines ne suffisent pas.
Que nous manque-t-il? La technologie n'est pas le plus gros problème: les moteurs sont assez puissants, les matériaux sont assez solides, les ordinateurs sont assez rapides. La limitation, apparemment, est notre compréhension du fonctionnement de la marche.
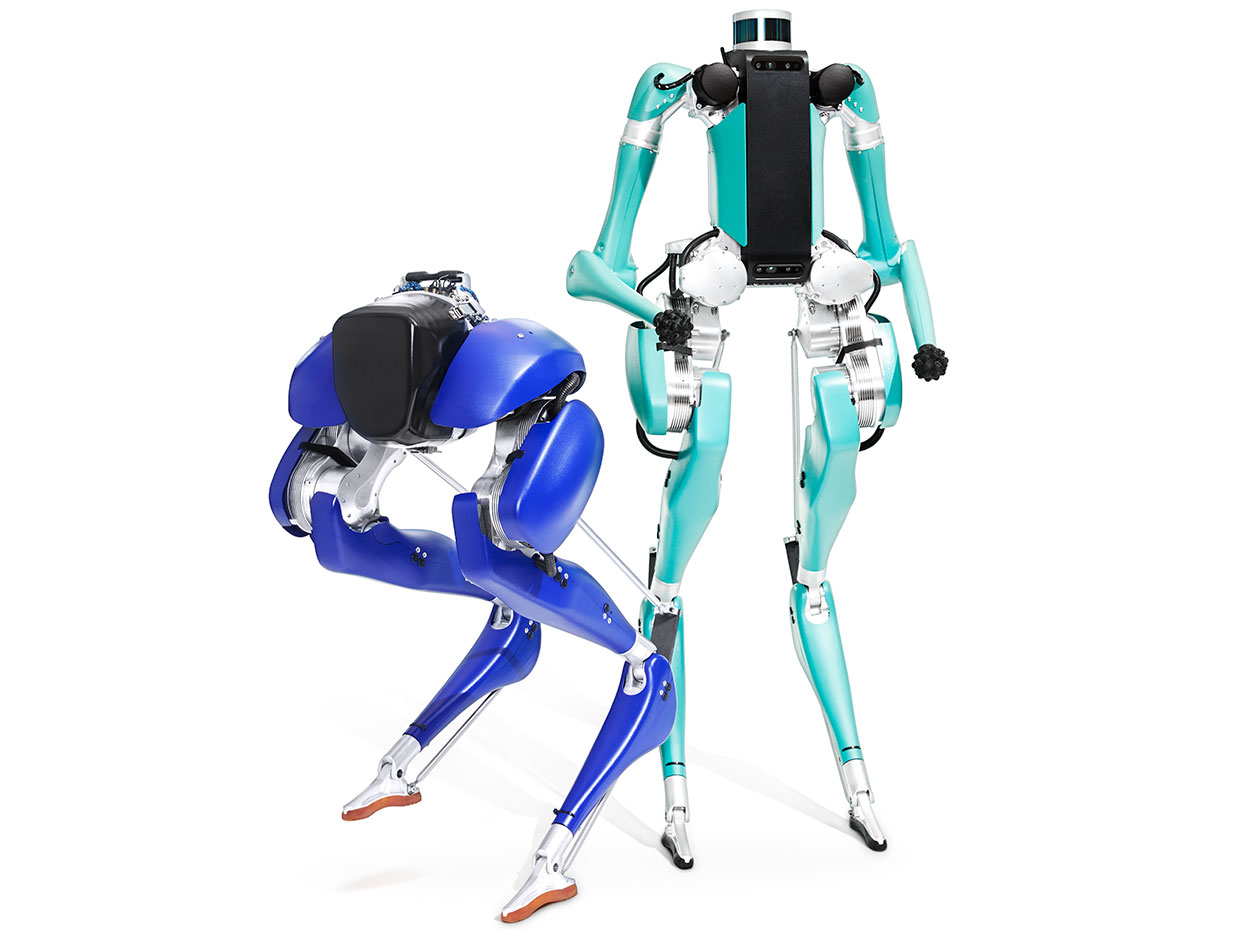 Cassie Robots (à gauche) et Digit d'Agility Robotics
Cassie Robots (à gauche) et Digit d'Agility RoboticsAu Dynamic Robotics Laboratory de l'Université de l'Oregon, j'ai dirigé une équipe de chercheurs essayant de comprendre les principes de base de la marche et d'appliquer ces découvertes aux robots. Je suis également co-fondateur et directeur technologique d'
Agility Robotics , une startup à Albany, Oregon, qui étudie l'utilisation commerciale des robots ambulants. En 2017, nous avons ouvert le monde à Cassie, une plateforme à deux pattes que nous avons vendue à plusieurs équipes de recherche. Bientôt, notre nouveau robot pourra entrer dans le monde: les jambes de Digit sont similaires aux jambes de Cassie, mais il a des capteurs et une paire de mains, qu'il utilise pour se stabiliser, et à l'avenir pour les manipulations.
Tant en laboratoire qu'en entreprise, nous travaillons à créer un avenir dans lequel les robots peuvent aller partout où les gens le peuvent. Je crois que les robots aux jambes dynamiques pourront un jour aider à soigner les personnes âgées dans leur maison, participer aux opérations de secours en cas d'incendie et de tremblement de terre et livrer des colis à domicile. Les robots pour les jambes permettront également la création d'exosquelettes et de prothèses qui aideront à accroître la mobilité des personnes handicapées. Ils font enfin de la réalité des robots de science-fiction.
Certains oiseaux courent mieux qu'ils ne volent ou ne volent même pas du tout. Les autruches, les dindes, les pintades et les cailles ne peuvent pas planer comme un faucon, mais se déplacent rapidement à pied. Mes collègues du laboratoire et Monica Daily du Royal Veterinary College de l'Université de Londres ont passé d'innombrables heures à observer les oiseaux marcher et courir dans le laboratoire. Nous voulons comprendre comment ces animaux sont capables de se déplacer si agilement et efficacement - et pourtant la plupart de ces machines à plumes travaillent sur les graines!
Dans une expérience, une pintade court le long d'un chemin, puis marche sur un trou déguisé en un morceau de serviette. L'animal ne savait pas qu'il entrerait dans une fosse d'environ la moitié de la longueur de ses pattes, mais il n'a pas trébuché et sa patte s'est allongée et s'est adaptée à la rainure pendant la course. Dans ce processus, quelque chose de remarquable se produit: le cerveau de l'oiseau n'a pas besoin de ressentir et de réagir à l'indignation, car ses pattes y font face elles-mêmes.
Cela donne une idée importante pour les développeurs de robots: si vous créez d'abord un robot, puis décidez de le programmer pour des mouvements agiles, vous ne réussirez pas. Comme c'est le cas pour la pintade, la dextérité d'un robot proviendra principalement des propriétés mécaniques de son corps, de ce que la robotique appelle la dynamique passive. Et il est négligé dans la plupart des projets de développement de robots à pattes. En développant soigneusement la dynamique passive du robot en parallèle avec le remplissage du logiciel, en les intégrant dans un système intégré, vous augmentez les chances qu'un robot se rapproche des caractéristiques d'un animal.
Il convient de noter que, bien que nous nous inspirions des animaux, nous ne reproduisons pas la forme du pied de l'oiseau ou la construction des muscles et des os du pied humain. Nous voulons comprendre la physique du mouvement animal et en dériver un modèle mathématique abstrait qui peut être compris, vérifié dans des simulations informatiques et incorporé dans de vrais robots. Puisque lors de la création de robots, nous utilisons du métal et de l'électronique au lieu des os et du cerveau, ils peuvent être très différents des animaux, en utilisant la même physique.
L'un des modèles mathématiques les plus simples décrit une masse ponctuelle (tronc) reliée à une paire de ressorts idéaux (jambes). Ce modèle de masse de ressort est, bien sûr, simplifié; il ressemble à un petit homme de tirets et ne prend pas en compte la présence d'articulations aux pieds, ni le fait que les pieds ne touchent pas le sol en des points isolés. Pourtant, le modèle masse-ressort peut produire des résultats inattendus. Dans les simulations, elle peut reproduire presque toutes les promenades que les gens et les animaux utilisent pour marcher et courir.
 Premiers pas: les jambes du robot ATRIAS ne sont pas humaines, mais ce fut la première machine à montrer une démarche humaine
Premiers pas: les jambes du robot ATRIAS ne sont pas humaines, mais ce fut la première machine à montrer une démarche humainePour tester le modèle masse-ressort, nous avons développé le robot bipède
ATRIAS , dont le nom est l'acronyme de notre hypothèse de base:
Supposons que le robot est une sphère [imaginez que le robot est une sphère]. L'idée était que la dynamique passive du robot pourrait recréer le modèle de masse ponctuelle avec des jambes de ressort aussi précisément que possible.
Chaque jambe est constituée de tiges en fibre de carbone légère assemblées en parallélogramme, connues sous le nom de quatre articulations articulées.
Une telle structure minimise la masse des jambes et leur inertie, rapprochant le système du modèle masse-ressort. Nous avons équipé la partie supérieure des pieds de ressorts en fibre de verre, réalisant physiquement le «ressort» du modèle, traitant les collisions avec le sol et stockant l'énergie mécanique.
Au début, ATRIAS pouvait à peine se tenir debout, et nous l'avons soutenu avec une laisse supérieure. Mais nous avons amélioré le contrôleur qui suit la vitesse et l'inclinaison du corps, et le robot a d'abord commencé à faire les premiers pas, puis à marcher librement dans le laboratoire. Puis ATRIAS a appris à se remettre des perturbations - dans une expérience, mes élèves lui ont lancé des balles. Nous avons également emmené ATRIAS sur le terrain de football universitaire, l'avons accéléré à une vitesse maximale de 7,6 km / h, puis nous nous sommes rapidement arrêtés.
Pour mieux comprendre ce que faisait le robot, imaginez que vous avez les yeux bandés, que vous marchez sur des échasses, que votre corps est enveloppé dans un tapis et que vous ne pouvez pas utiliser vos mains pour vous équilibrer. Vous ne pouvez qu'aller plus loin - c'est ce qu'a fait ATRIAS. Il pouvait même faire face à des obstacles, par exemple, avec un tas de bois de chauffage en chemin.
Et, bien que la dextérité soit un élément important, il était également très important d'économiser l'énergie. Nous avons confirmé la rentabilité du robot en mesurant un paramètre appelé coût de transport [COT]. Il est défini comme le rapport entre la consommation d'énergie (puissance) et le produit du poids et de la vitesse, et est utilisé pour comparer l'efficacité énergétique des animaux et des machines en mouvement. Plus le COT est bas, mieux c'est. Chez une personne qui marche, le SOT est de 0,2, et dans un robot humanoïde ordinaire, ce chiffre est beaucoup plus élevé - de 2 à 3, selon
certaines estimations . Nos expériences
ont montré que dans ATRIAS en mode marche, le COT est de 1,13, ce qui démontre l'
efficacité des robots dynamiques. Et en fait, alimenté par plusieurs batteries lithium-polymère - telles que celles utilisées dans les voitures radiocommandées - ATRIAS pourrait fonctionner pendant environ une heure.
Nous avons également
mesuré la force avec laquelle le robot appuie sur le sol. Nous mettons ATRIAS pesant 72,5 kg (environ la taille d'une personne moyenne) sur une plate-forme électrique - cet outil est souvent utilisé en médecine du sport pour mesurer la démarche d'une personne en mesurant les forces de réaction. Lors de la marche du robot, nous avons enregistré des données sur les forces. Puis un de mes élèves a pris la place d'ATRIAS, et nous avons enregistré ses pas. Après avoir construit un graphique de la dépendance de la réaction de support dans le temps, nous avons vu qu'elle coïncide exactement avec le graphique du robot. À notre connaissance, il s'agit de la mise en œuvre la plus réaliste de la dynamique de la démarche humaine des robots aujourd'hui.
Les résultats ont confirmé qu'un simple système dynamique masse-ressort peut être implémenté dans un robot. Il possède de nombreuses propriétés utiles, telles que l'efficacité, la fiabilité et la flexibilité, et atteint le fond de la marche. Il est temps de créer le prochain robot.
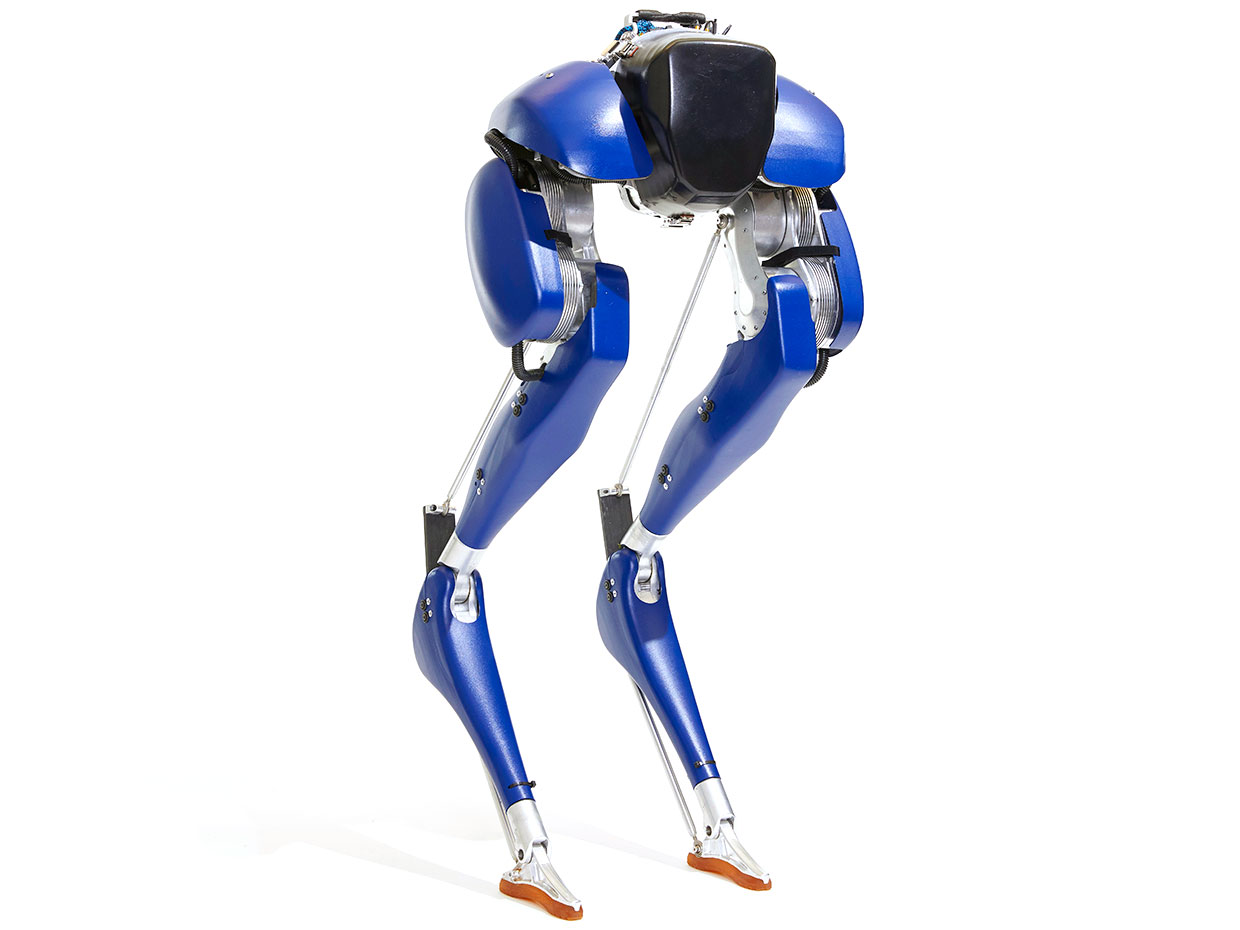 Cassie utilise cinq moteurs et deux ressorts sur chaque jambe pour se déplacer sur des terrains difficiles.
Cassie utilise cinq moteurs et deux ressorts sur chaque jambe pour se déplacer sur des terrains difficiles.Cassie, comme ATRIAS, est un robot de marche dynamique. Nous avons optimisé tous les aspects de sa conception afin de créer un robot fiable et capable adapté à la commercialisation. Et nous avons placé la barre haute: nous voulions que Cassie puisse courir à travers la forêt, marcher sur un terrain accidenté et travailler pendant plusieurs heures sur batterie sans suspension.
Cassie est construite sur les mêmes concepts que ceux utilisés pour ATRIAS, mais nous avons décidé de fabriquer ses nouvelles jambes. Auparavant, nous utilisions deux moteurs pour alimenter chacun des quatre maillons de chaque jambe. Un tel schéma minimise leur masse, mais il y a un inconvénient: en marchant, un moteur ralentit l'autre, ce qui entraîne des pertes d'énergie. En travaillant sur Cassie, nous avons
étudié d' autres configurations de jambes pour éliminer cet effet. Le nouveau schéma vous permet de réduire la taille des moteurs et le robot est devenu encore plus efficace que ATRIAS.
Il est important de noter que la configuration des jambes de Cassie est le résultat de cette analyse. Le fait que le pied ressemble au pied d'une autruche ou d'un autre
théropode peut indiquer que nous sommes sur la bonne voie, mais nous n'avons pas cherché à créer un robot qui, après s'être recouvert de son plumage, pourrait se perdre dans un troupeau d'émeu.
Chaque jambe de Cassie a cinq axes de mouvement - ou degrés de liberté, parlant de manière robotique - et chacun a son propre moteur. Les hanches ont trois degrés de liberté, comme le nôtre, ce qui permet à la jambe de tourner dans toutes les directions. Deux autres moteurs ont des essieux au genou et au pied. Cassie a des degrés de liberté supplémentaires dans le bas de la jambe et la cheville; ils sont passifs et ne sont pas contrôlés par des moteurs, mais attachés à des ressorts, ce qui permet au robot de se déplacer sur un terrain difficile, non soumis aux humanoïdes à pied plat.
Les nouvelles jambes de Cassie ont nécessité la création d'un contrôleur de bas niveau plus sophistiqué qu'ATRIAS. ATRIAS a étendu sa jambe, appliquant simplement une force égale et opposée dans le sens du couple des deux moteurs. Avec Cassie, le déplacement des jambes dans une certaine direction nécessite de calculer différents couples pour différents moteurs. Pour ce faire, le contrôleur doit prendre en compte l'inertie des jambes et la dynamique des moteurs et des boîtes de vitesses.
 Le contrôleur Cassie utilise les étapes planifiées et l'équilibrage dynamique
Le contrôleur Cassie utilise les étapes planifiées et l'équilibrage dynamiqueOui, la tâche du contrôleur est devenue plus difficile, mais cette méthode vous permet de marcher plus efficacement et d'utiliser un plus large éventail de comportements. Cassie peut marcher à des vitesses allant jusqu'à 5 km / h en utilisant l'un des premiers contrôleurs. La consommation électrique varie de 100 watts (debout) à 300 watts (en mouvement), et sur une batterie lithium-ion, elle peut fonctionner pendant 5 heures. De plus, de nouvelles jambes permettent à Cassia de manœuvrer d'une manière qu'ATRIAS ne pourrait pas. Et grâce au moteur dans l'articulation du pied, il peut se tenir debout sans avoir besoin de bouger constamment, comme l'a fait ATRIAS.
Cassie ne pèse également que 31 kg, deux fois moins que ATRIAS. Deux Cassie peuvent être chargées dans le coffre d'une voiture en moins d'une minute. Il est également plus fiable: ses pièces sont en aluminium et en fibre de carbone, et le boîtier de protection est en plastique acrylique-polyvinyle durable, le protège des collisions et des chutes.
Jusqu'à présent, Cassie ne sait pas comment traverser la forêt. Mais nous l'avons conduite dehors sans assurance, et elle marche sur le sol, l'herbe et les feuilles tombées. Nous étudions maintenant la question de l'intégration du comportement dynamique d'un robot à
la planification du mouvement , ce qui lui permet, par exemple, de monter des escaliers. Nous travaillons également sur une autre fonctionnalité qui rendra les robots de type Cassie plus utiles: les mains.
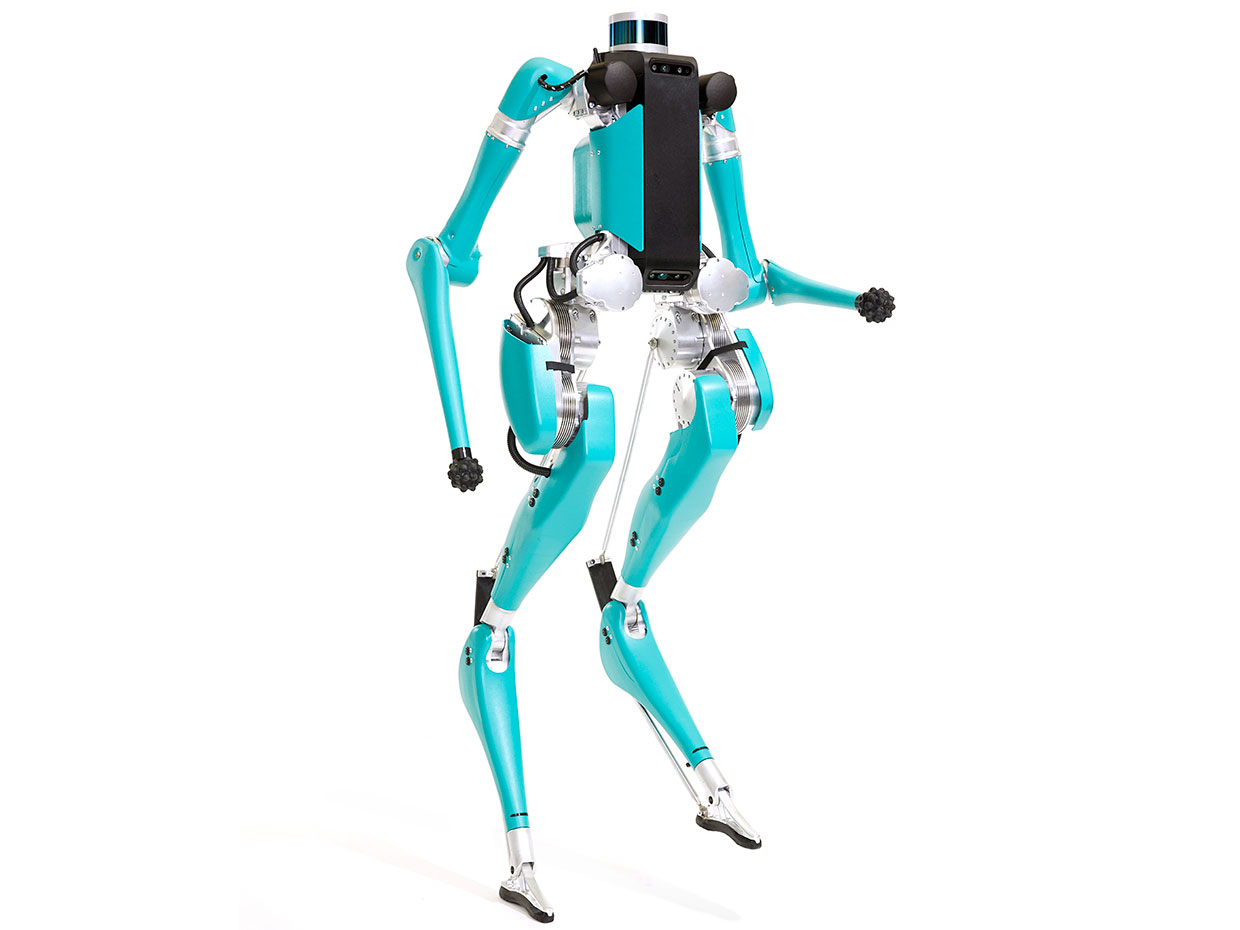 Digit a des jambes, comme Cassie, mais il a aussi un corps avec des capteurs à l'intérieur et une paire de mains qui l'aident avec la mobilité et l'équilibre.
Digit a des jambes, comme Cassie, mais il a aussi un corps avec des capteurs à l'intérieur et une paire de mains qui l'aident avec la mobilité et l'équilibre.Digit est un descendant direct de Cassie. Il a des jambes similaires, mais nous avons ajouté un torse avec des capteurs à l'intérieur et une paire de mains. Ils sont spécialement conçus pour l'aider à se déplacer et à s'équilibrer, et à se balancer en fonction de la démarche. Ils permettent également à Digit de se soutenir à l'automne et de réorienter son corps pour qu'il se redresse.
Digit a autre chose que Cassie n'a pas: la perception intégrée. Nous y avons ajouté de nombreux capteurs, dont du lidar dans le haut du corps. Les capteurs l'aident à collecter des données, ce qui permet au robot de se déplacer dans un monde plein d'obstacles, par exemple, dans des pièces et des marches encombrées, et de s'appuyer sur une dynamique stable uniquement dans des situations inattendues et avec des erreurs de capteur.
Digit, et le robot avec des jambes qui vient après lui, a beaucoup à apprendre. Mais nous sommes convaincus qu'ils changeront le monde. Leur influence peut être comparée aux automobiles en termes de changement du mode de vie des gens, des modèles de circulation et des schémas urbains, où ces robots promettent de transformer la logistique et la livraison des colis.
Dans un avenir proche, lorsqu'il y aura des robomobiles, les constructeurs automobiles et les entreprises proposant des trajets communs tels que Lyft et Uber auront leurs propres flottes de voitures transportant des personnes, et le trafic maximal sera aux heures de pointe, tout comme aujourd'hui. Mais que feront ces voitures tard dans la nuit et en milieu de journée? Ils ne sont peut-être pas inactifs, mais transportez les colis des entrepôts automatiques jusqu'à votre porte. Cependant, ces voitures ne pourront accéder qu'au trottoir - il est assez difficile de livrer un colis à une porte sans personne. Et puis les robots ambulants entrent en jeu. Ils rouleront dans de telles voitures et marcheront sur les derniers mètres. Et bien que les roues et les ailes puissent jouer certains de ces rôles, dans un monde conçu pour les deux jambes, aucune autre plateforme de mouvement ne sera aussi flexible qu'un robot sur ses pieds.
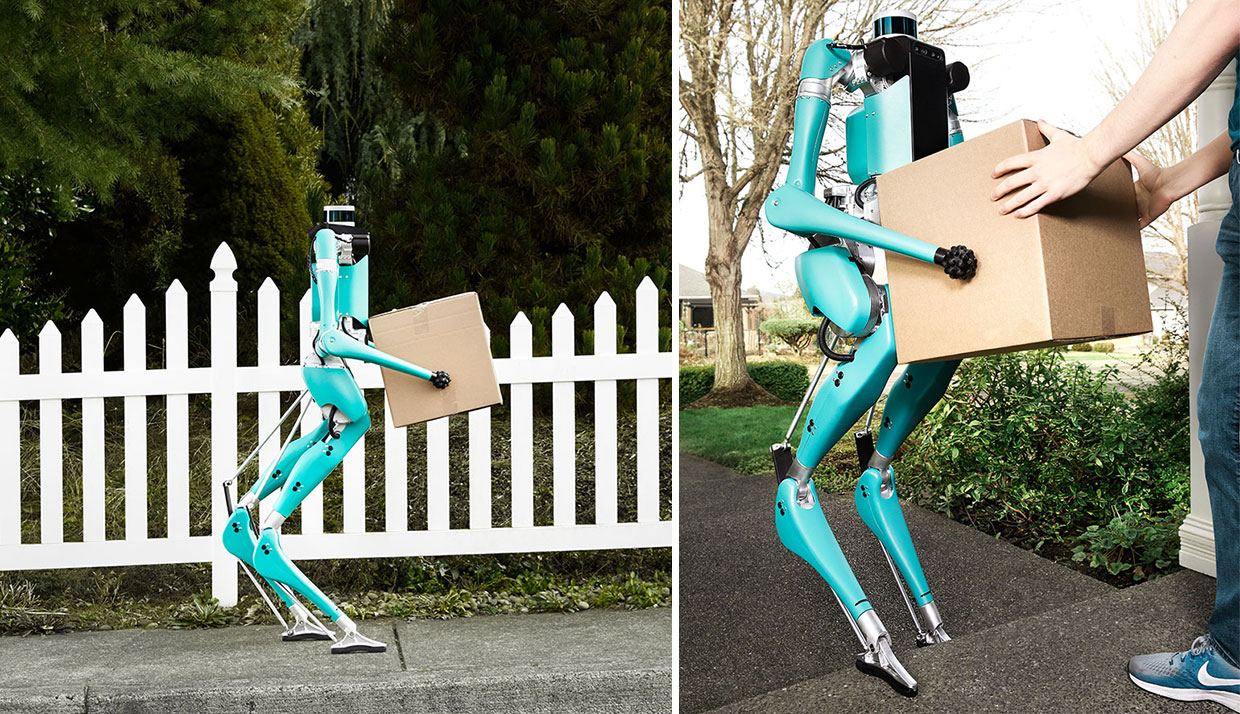 Digit apprend à marcher sur différents terrains et à monter les escaliers, pour qu'un jour il puisse livrer des colis directement à la porte
Digit apprend à marcher sur différents terrains et à monter les escaliers, pour qu'un jour il puisse livrer des colis directement à la porteLes robots de livraison feront partie d'un système logistique de plus en plus automatisé, où les colis du fabricant sont immédiatement livrés à votre porte. Ce système réduira les coûts de livraison, de sorte que la livraison des colis sera moins chère que leur achat dans de grands entrepôts bien éclairés et chauffés à accès humain. Les petits magasins de gros deviendront inutiles. Les gens, bien sûr, pourront faire du shopping pour certaines choses. Mais les produits quotidiens seront livrés par des robots, vous faisant gagner du temps et de l'argent.
Les robots bipèdes pourront pénétrer dans nos maisons et nos bureaux. Ils peuvent marcher à l'étage et dans des pièces surpeuplées, interagir avec des personnes à la hauteur des yeux et à l'échelle humaine, ce qui nous permettra de vieillir adéquatement dans nos maisons. Ils aideront à transporter des objets et fonctionneront comme des dispositifs de présence à distance, ce qui permettra aux membres de la famille et aux amis d'utiliser le robot afin de communiquer avec les gens à distance et de leur tenir compagnie.
Les robots aux pieds pourront se rendre là où les gens sont dangereux. Ils vont parachuter dans des incendies de forêt pour collecter des données en temps réel, se heurter à des bâtiments en feu à la recherche de résidents et pénétrer dans des zones sinistrées telles que la centrale nucléaire de Fukushima, explorant des zones difficiles d'accès. Ils inspecteront régulièrement l'intérieur des centrales hydroélectriques et des mines abandonnées afin que nous n'ayons pas à le faire.
Pour entrer dans cet avenir, nous devons résoudre de nombreux problèmes. Mais je suis convaincu que la communauté robotique peut rendre cette technologie pratique. Ce sera un petit pas pour le robot et un énorme bond en avant pour toute l'humanité.