Recherche, entretien, test, sélection, recrutement, adaptation - une manière difficile et compréhensible pour chacun de nous - à la fois l'employeur et l'employé.
Un débutant n'a pas les compétences spécialisées nécessaires. Même un spécialiste expérimenté doit reconstruire. Le manager est mis sous pression par des questions, quelles tâches doivent être définies pour un nouvel employé au départ et quel temps leur être consacré? En même temps, garantir l'intérêt, l'implication, la motivation et l'intégration. Mais ne risquez pas les tâches commerciales critiques.
Pour cela, nous lançons des projets internes relais. Ils se composent d'étapes courtes indépendantes. Les résultats d'un tel travail servent de base aux développements ultérieurs et permettent au débutant de se montrer, de rejoindre l'équipe avec une tâche intéressante et sans risquer de remplir un projet important. Voici l'accumulation d'expérience, la connaissance de collègues et la possibilité de se montrer du meilleur côté, lorsqu'il n'y a pas de restrictions strictes de la part de l'héritage.
Un exemple d'un tel développement de relais était le thème d'un écran rotatif basé sur un effet stroboscopique avec la possibilité d'afficher une image dynamique utilisateur arbitraire faite sur l'écran du téléphone. Des prototypes peuvent être trouvés
ici .
Le travail a été réalisé séquentiellement par plusieurs salariés et sera poursuivi par de nouveaux collaborateurs lors de leur intégration (de deux semaines à un mois selon les capacités et le niveau de compétences).
Les étapes étaient les suivantes:
a) réfléchir à un design (avoir étudié les échantillons disponibles, la description des analogues, avoir fait preuve d'initiative créative);
b) élaborer un schéma de circuit, le dissoudre sur la carte;
c) développer un protocole de transfert d'images d'un téléphone vers un appareil;
d) fournir le contrôle à partir d'un smartphone via Bluetooth LE.
L'option de départ était d'utiliser quelque chose de très compact, comme une centrifugeuse à trois feuilles, qui, lorsqu'elle était tournée manuellement, commençait à montrer des inscriptions. Le module BLE était situé dans un lobe, dix LED RGB dans le second, un capteur optique dans le troisième et une batterie au centre. Un schéma électrique a été établi et les premières expériences ont été menées. Il est devenu clair que le niveau de qualité d'image est très bas, la résolution est petite, l'effet de jeu est de courte durée, les possibilités sont modestes. Oui, et les filateurs sont partis aussi vite qu'ils sont apparus. Il a été décidé de relever la barre et de développer un écran stroboscopique rotatif. Au moins, il peut être utilisé à des fins pratiques lors d'expositions et de conférences et dans un avenir proche, l'intérêt pour de telles solutions ne disparaîtra pas.
En ce qui concerne la conception, il y avait deux questions principales: comment disposer les LED (dans un plan vertical, comme dans l'exemple ci-dessus ou horizontal) et comment alimenter une carte tournante avec des LED.
À des fins éducatives, les LED étaient situées uniquement dans un plan horizontal. Quant à l'alimentation de la carte, il y avait un choix important: soit nous prenons le moteur du collecteur encombrant, bruyant, mais bon marché, soit nous utilisons une solution plus élégante avec une transmission de puissance sans contact utilisant deux bobines - une sur le moteur et l'autre sur la carte. La solution, bien sûr, est élégante, mais plus chère et plus longue, car les bobines devaient d'abord être calculées, puis enroulées (de préférence pas sur le genou).
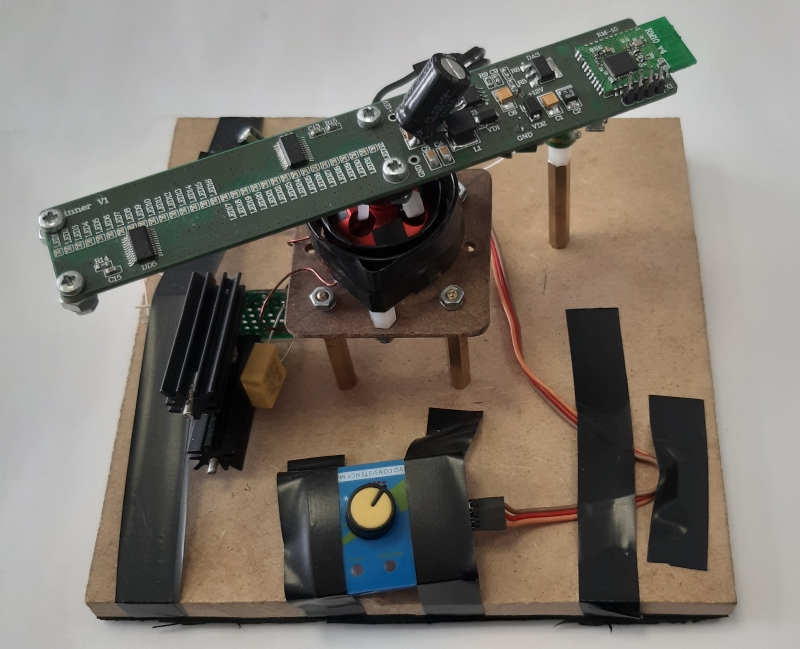
 Il ressemble au prototype résultant
Il ressemble au prototype résultantLes spécificités de la production de masse sont telles que chaque centime supplémentaire dans les coûts de production est important. Le succès peut être déterminé par le coût d'une poignée de passivation. Par conséquent, il est souvent nécessaire de choisir une option moins efficace, mais moins chère, afin que le fabricant puisse maintenir sa compétitivité commerciale. Par conséquent, imaginant que l'écran de rotation sera lancé en production de masse, le développeur a choisi un moteur à collecteur.
Le prototype résultant scintilla au début, fit du bruit et secoua la table. La conception qui assurait la stabilité s'est avérée si lourde et dimensionnelle qu'il n'était pas logique de la porter à un prototype en série. Se réjouissant du succès intermédiaire, ils ont décidé de remplacer le moteur par un transformateur tournant à entrefer. Une autre raison était l'incapacité d'alimenter le moteur à partir du port USB de l'ordinateur.
La base de la carte LED était notre module RM10 et six pilotes LED
MBI5030 .
Les pilotes ont 16 canaux avec la possibilité de contrôler chacun indépendamment. Ainsi, 6 de ces pilotes et 32 LED RGB au total ont la capacité d'afficher 16 millions de couleurs.
Pour synchroniser et stabiliser l'image de sortie, deux capteurs Hall magnétorésistifs
MRSS23E ont été utilisés.
Le plan était simple - le capteur donne une interruption pour chaque tour de la planche, en fonction de l'horloge entre les deux passes, la position des LED est déterminée et leur azimut et lueur dans le balayage à 360 degrés sont calculés.
Mais quelque chose s'est mal passé - quelle que soit la vitesse de rotation de la carte, le capteur a émis au hasard une ou deux interruptions par passe. Ainsi, l'image s'est avérée floue et repliée vers l'intérieur.
Le remplacement des capteurs n'a pas changé la situation, le capteur Hall a donc été remplacé par une photorésistance.
Qui a pensé pourquoi le capteur magnétorésistif pourrait se comporter comme ça, partagez les commentaires.
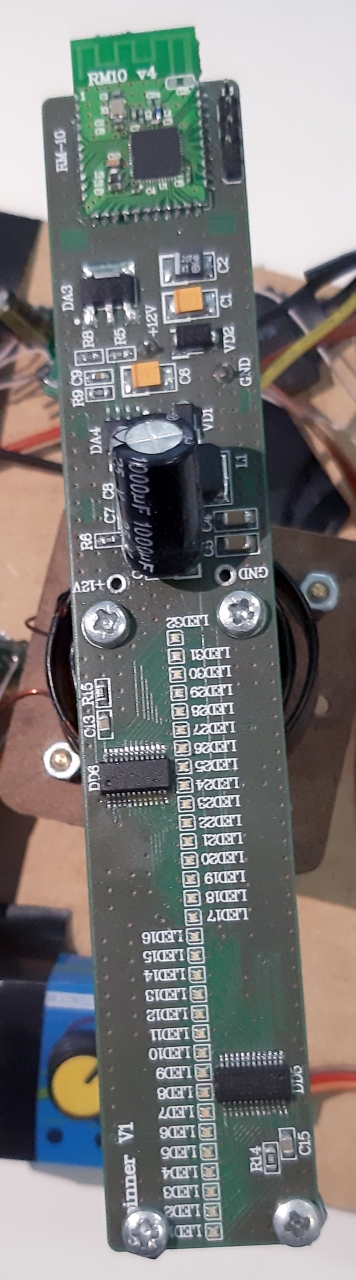 Côté supérieur de la planche
Côté supérieur de la plancheAvec un capteur optique, l'image est claire, mais se stabilise en 30 secondes environ. Cela se produit pour diverses raisons, dont l'une est la discrétion du temporisateur. C'est 4 millions de ticks par seconde, divisés par 360 degrés avec le reste, ce qui introduit une distorsion dans l'image de sortie.
Dans une montre stroboscopique chinoise, l'image est réglée en quelques secondes au prix du fait qu'un petit segment du cercle n'apparaît tout simplement pas: l'image circulaire est vide, elle est invisible dans le texte, mais l'image est incomplète.
Cependant, les problèmes n'ont pas cessé. Le microcontrôleur
nRF52832 ne peut pas fournir la vitesse de transfert de données nécessaire pour un nombre possible de nuances (environ 16 MHz) - l'écran produit 1 image par seconde, ce n'est pas suffisant pour l'œil humain. De toute évidence, vous devez placer un microcontrôleur séparé sur la carte pour contrôler l'image, mais pour l'instant, il a été décidé de remplacer MBI5030 par
MBI5039 . Ce n'est que 7 couleurs, y compris le blanc, mais cela suffit pour travailler sur la partie logicielle.
Eh bien, il est également important, pour le plaisir de commencer cette tâche éducative - de programmer le microcontrôleur et d'effectuer le contrôle via l'application sur le smartphone.
Maintenant, le scan est transmis via Bluetooth directement via nRF Connect, et l'interface d'application est en cours de développement.
Ainsi, les résultats intermédiaires de l'équipe relais sont les suivants:
L'écran de rotation a une ligne de 32 LED et un diamètre d'image de 150 mm. Il affiche 7 couleurs, définit une image ou du texte en 30 secondes (ce qui n'est pas idéal, mais acceptable pour commencer). Via une connexion Bluetooth, vous pouvez envoyer une commande pour changer l'image.
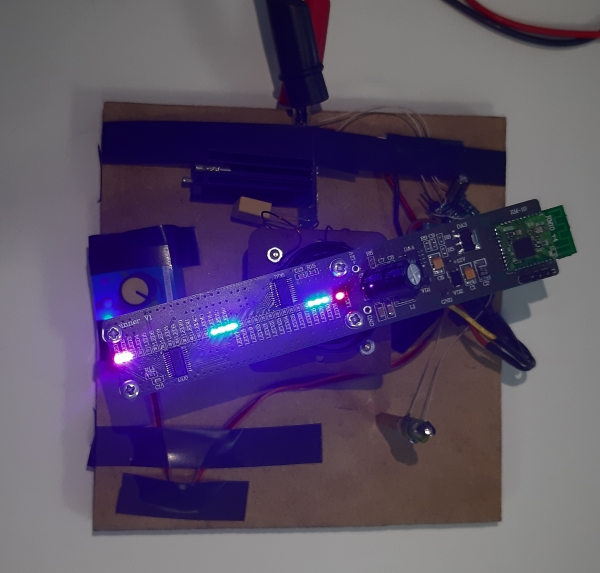
 Et donc ça a l'air
Et donc ça a l'airEt les nouveaux jeunes développeurs pour une formation réussie doivent résoudre les tâches suivantes:
Pour surmonter le manque de RAM dans le microcontrôleur pour un affichage en couleur de la palette de couleurs. Modifier l'application pour la formation et le transfert d'images statiques ou dynamiques. Donnez au design un aspect fini. Nous vous tiendrons au courant.
PS Bien sûr, après avoir terminé le travail sur Bluetooth LE (
nrf52832 ), nous allons concevoir et implémenter la version Wi-Fi / Bluetooth sur ESP32, mais ce sera une nouvelle histoire.
