Comme le temps passe vite! Le quatrième mois terrestre de travail de l'autre côté de la lune de l'atterrisseur Chang'e-4 et du rover Yutu-2 est déjà arrivé. Les appareils ont survécu à une période de température extrêmement basse la troisième nuit au clair de lune, maintenant ils sont sortis du mode sommeil et ont commencé de nouvelles recherches sur la surface lunaire et l'espace extra-atmosphérique.
Quelles caméras sont installées sur le module Chang'e-4 et le rover Yutu-2, et que prennent les caméras pendant les longues journées lunaires?
Documents précédemment publiés sur la mission Chang'e-4: À l'heure actuelle, 88 jours (2212 heures) se sont écoulés depuis l'atterrissage du rover Yutu-2 sur la surface lunaire et 115 jours (2760 heures) après le lancement du rover Yutu-2 depuis le cosmodrome de Sichan dans le cadre de la mission Chang'e-4 sur la Lune.
Quatrième jour lunaire de l'autre côté de la lune:
La durée prévue du module d'atterrissage est d'un an, le rover - trois mois.
En fait, le rover Yutu-2 a déjà atteint sa durée de vie estimée à 2160 heures.
Ce n'est pas un record pour les missions lunaires de Chang'e, le premier atterrisseur Chang'e-3, qui est sur la partie visible de la Lune depuis décembre 2013, montre encore des signes de vie (télémétrie et données provenant de divers instruments), mais son partenaire l'atterrissage - le premier rover Yut, bien qu'il ait perdu sa mobilité 40 jours après le début des travaux productifs sur la surface lunaire, jusqu'à la mi-2016, il a transféré des données au MCC en mode stationnaire.
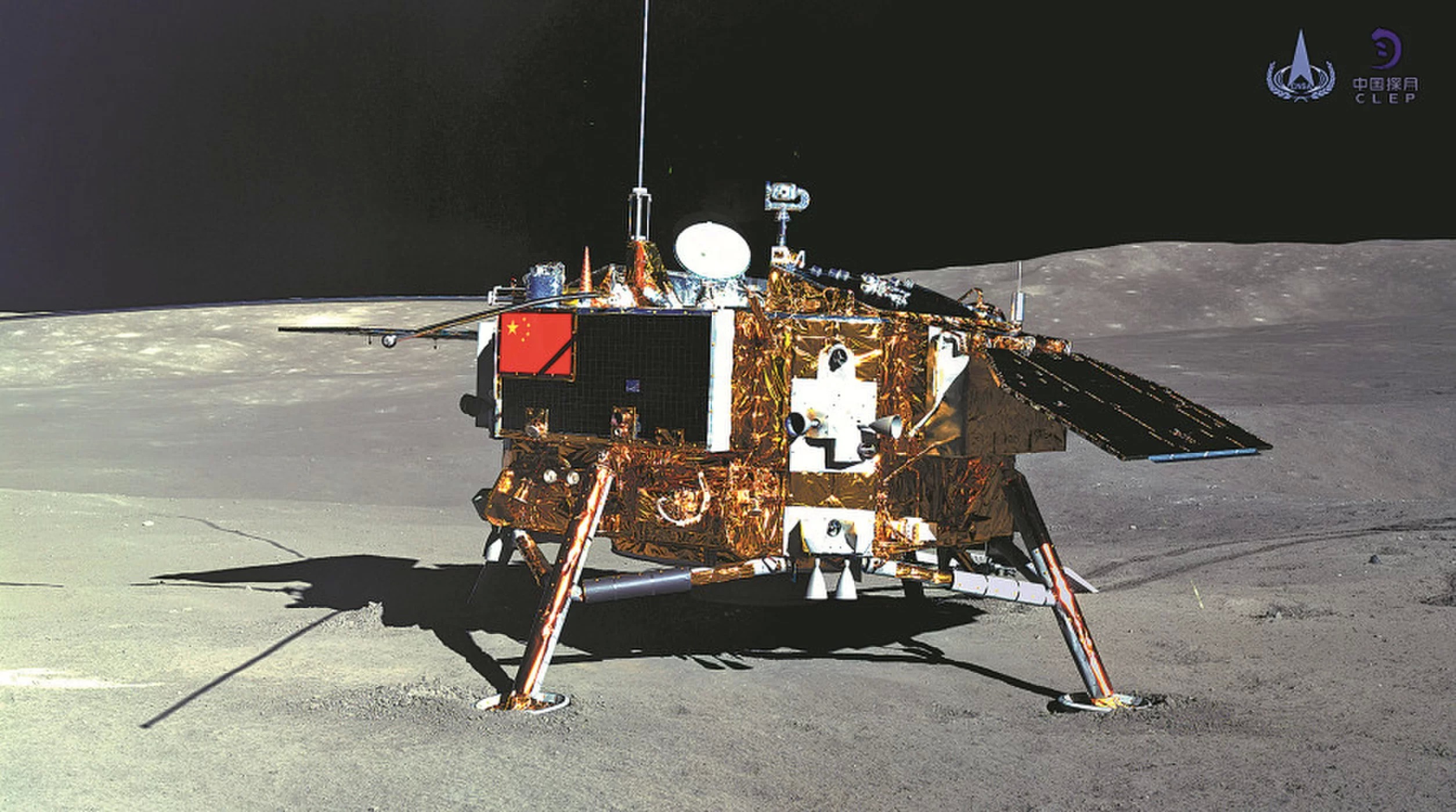
Données sur les modules de la mission lunaire "Chang'e-4":- Module de descente «Chang'e-4» (4,4 mètres entre supports d'appui opposés, poids 1200 kg);
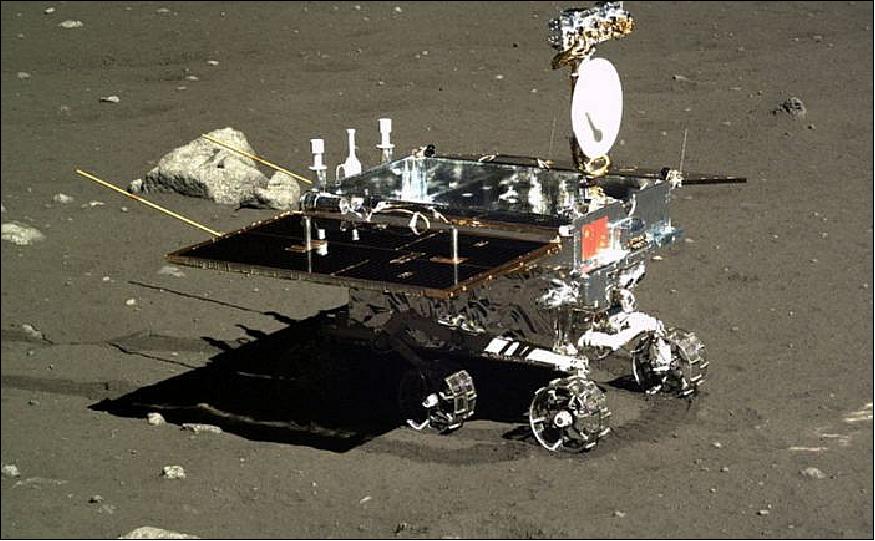
- Rover Yutu-2 (hauteur 1 mètre, largeur 1 mètre (sans panneaux solaires), 1,5 mètre de longueur, deux panneaux solaires pliables, six roues, poids 140 kg.).
 Nouvelles photos du fond de la lune
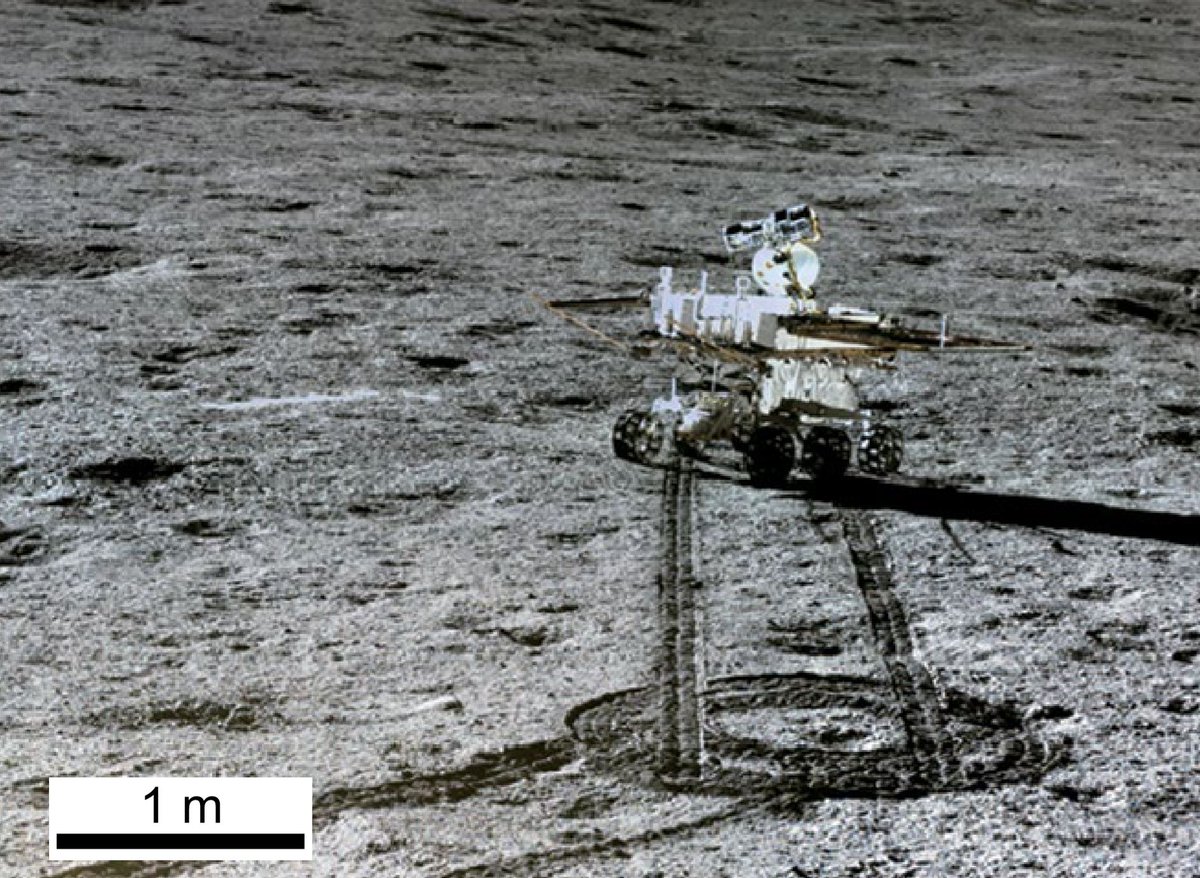
Nouvelles photos du fond de la luneLa lune sur les roues du rover Yutu-2 et l'ombre de l'antenne et de la plate-forme avec une caméra panoramique:

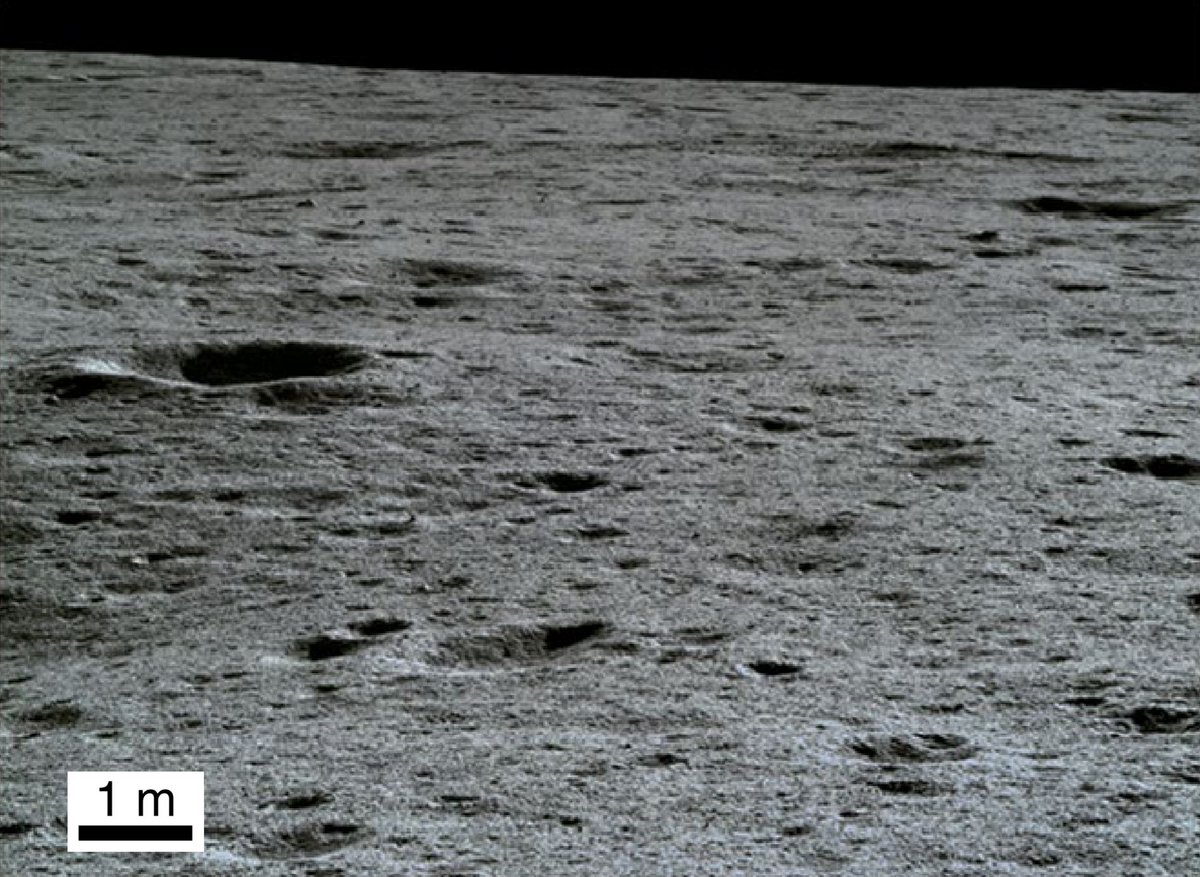
Plusieurs cratères (avec de belles ombres) et des montagnes en arrière-plan:

Et ce sont des photos de l'article scientifique «Lunaire au loin à explorer par Chang'e-4» du numéro d'avril de Nature Geoscience.

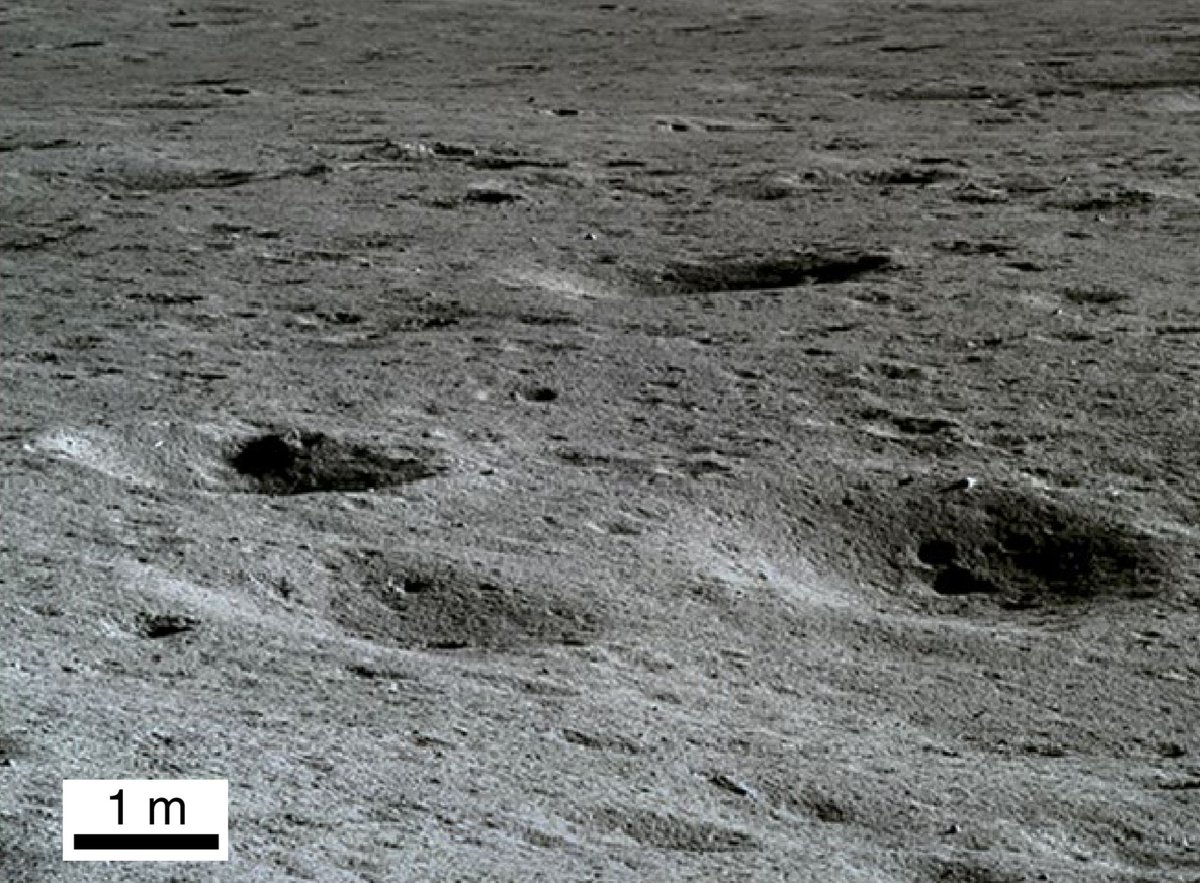
Petits cratères près du site d'atterrissage:
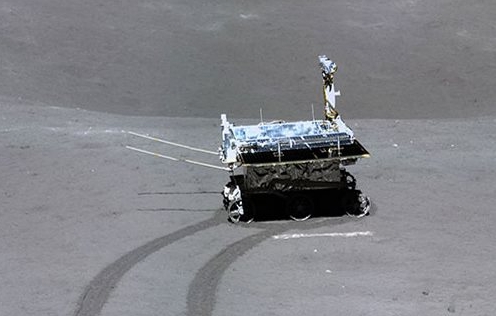
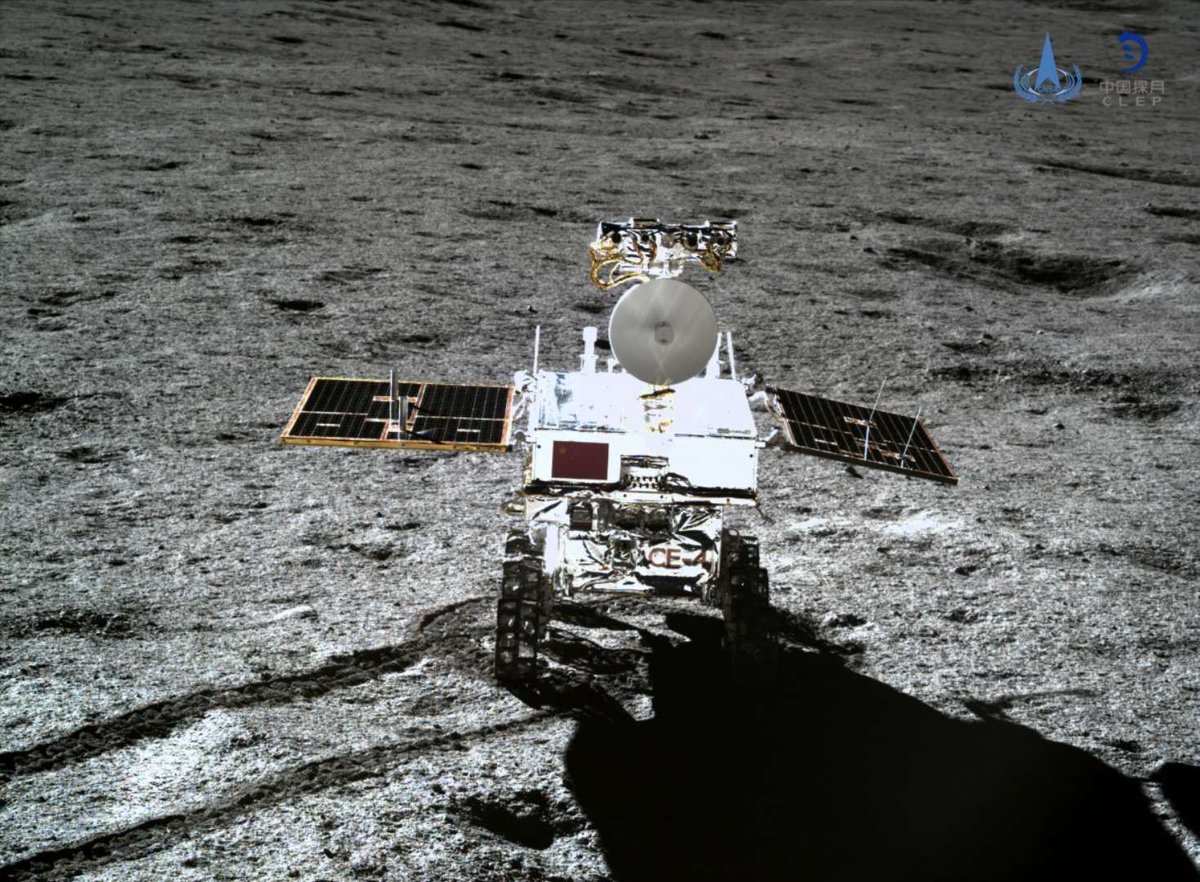
Le rover "Yutu-2" explore la surface de la lune:
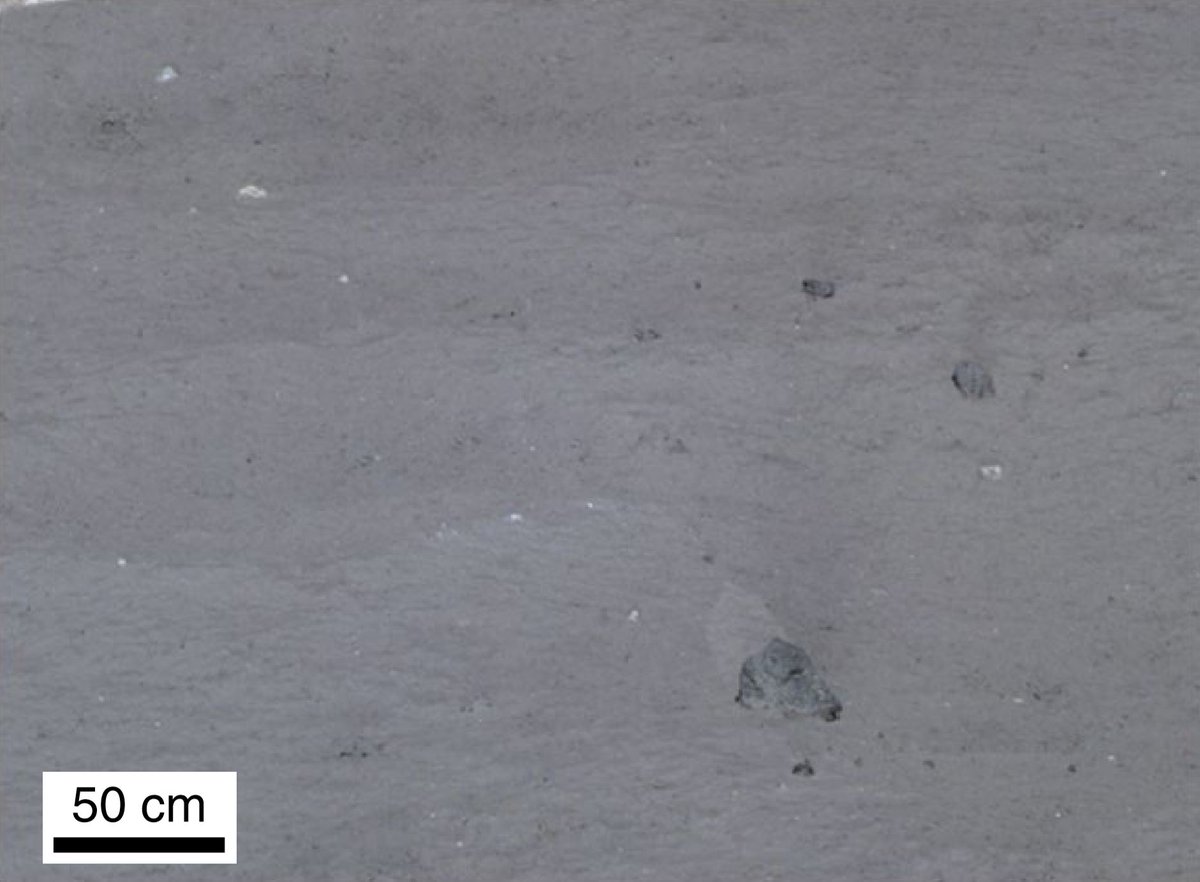
Fragments de pierres dans de petits cratères (photo du rover Yutu-2):
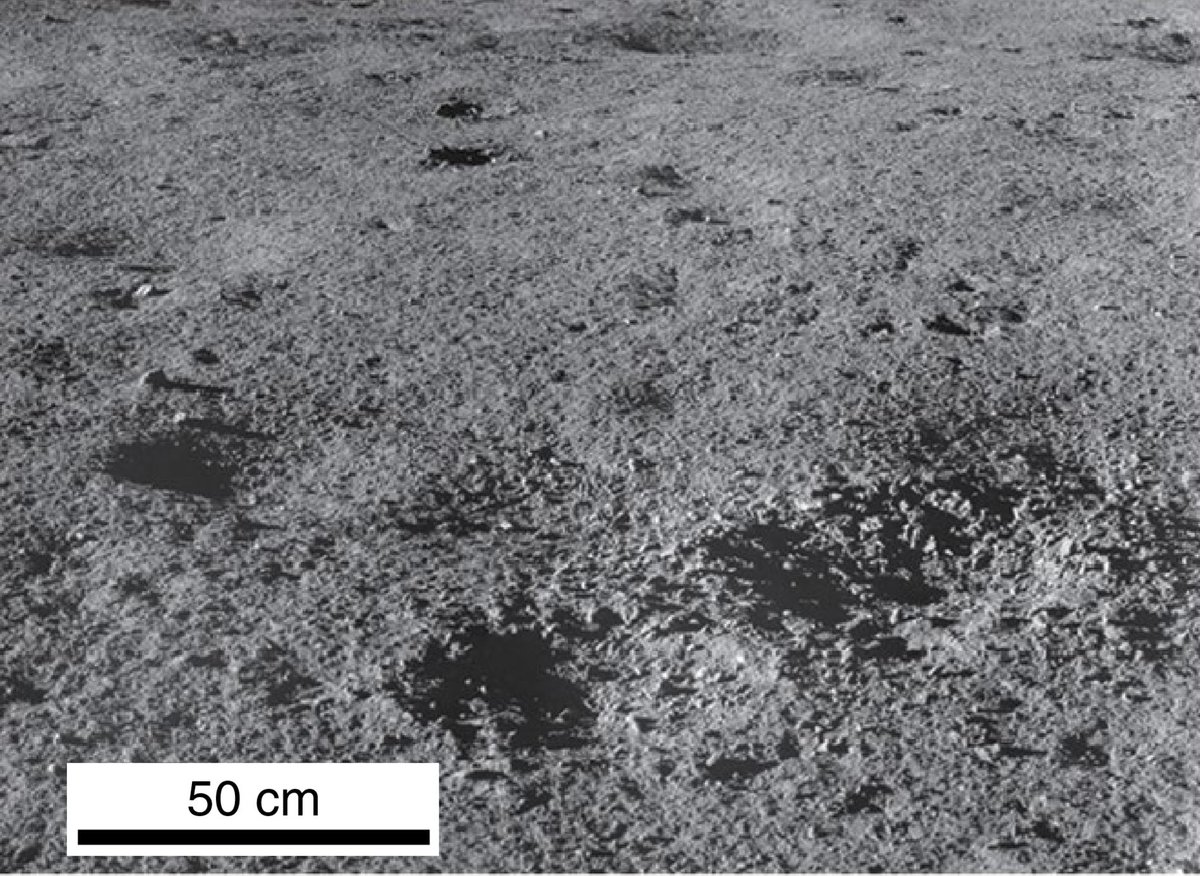
Petites pierres le long du rover Yutu-2:

Pierres sombres très inhabituelles près du site d'atterrissage:
 Quelles caméras sont installées sur le module Chang'e-4 et le rover Yutu-2?Deux caméras sont installées sur le module d'atterrissage Chang'e-4:
Quelles caméras sont installées sur le module Chang'e-4 et le rover Yutu-2?Deux caméras sont installées sur le module d'atterrissage Chang'e-4:
- caméra d'atterrissage (caméra d'atterrissage - LCAM);
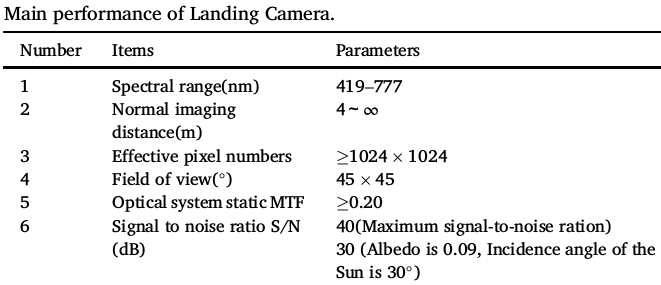
- caméra paysage (caméra Terrain - TCAM).La caméra d'atterrissage LCAM (0,5 kg, taille 116x100x70,4 mm) a été installée au bas du module Chang'e-4, allumée automatiquement à une altitude de 12 km au-dessus de la surface lunaire pour enregistrer la procédure d'atterrissage avec une résolution de 1024x1024 pixels, 10 images par seconde.
Vidéo de la procédure d'atterrissage de la caméra LCAM - plusieurs milliers d'images sont collectées dans une vidéo
Caractéristiques de la chambre d'atterrissage LCAM:
Le schéma de circuit des éléments de la chambre d'atterrissage LCAM:
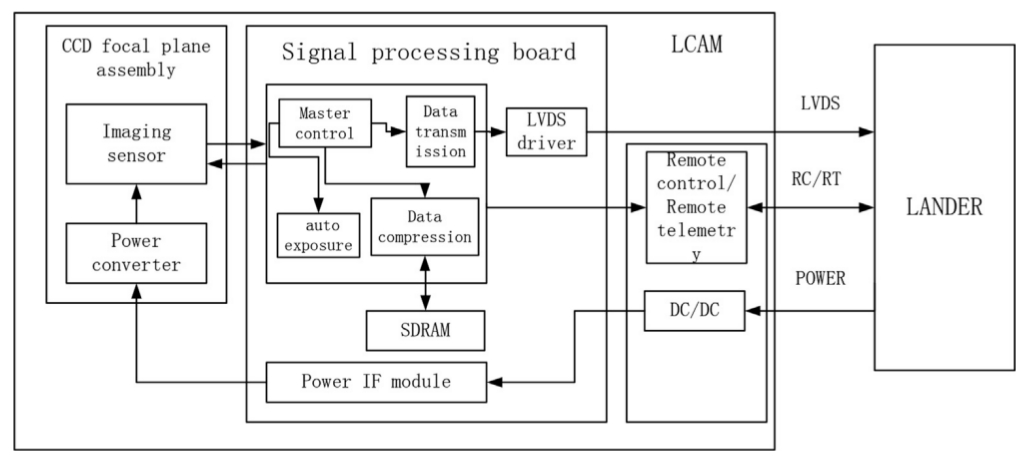
Les données sont transmises via l'interface LVDS (Low Voltage Differential Signaling).
Après avoir atterri sur la lune, la caméra LCAM ne capture que la même image avec le support d'atterrissage:

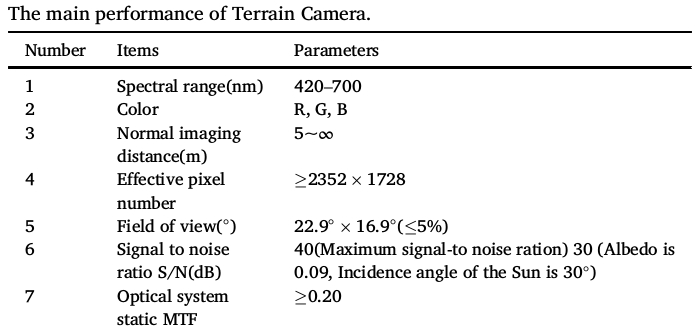
La caméra paysage TCAM (0,64 kg, taille 92x105x118,9 mm) est installée au point le plus élevé du module d'atterrissage Chang'e-4 sur un support spécial qui permet à la caméra de pivoter de 360 degrés autour de son axe et peut incliner la caméra vers le haut ou vers le bas jusqu'à un angle allant jusqu'à 120 degrés. Les photographies panoramiques de la surface et des éléments du module d'atterrissage, le suivi du rover et l'exploration de la zone autour de la zone d'atterrissage sont des fonctions TCAM.
Caractéristiques de la caméra paysage TCAM:
Le schéma de communication des éléments de la caméra paysage TCAM:
Panorama du site d'atterrissage:

Caméras LCAM et TCAM sur le module d'atterrissage:

Le module d'atterrissage Chang'e-4 fonctionne en mode stationnaire et ses photographies de la surface dans la zone d'atterrissage sont tout d'abord très importantes pour comprendre quels types de surfaces se trouvent réellement autour du module. Après tout, il existe un grand nombre de petits cratères et de pierres, et ils peuvent interférer (dans le pire des cas) avec la procédure d'abaissement du rover. Depuis l'atterrissage, le module Chang'e-4 ne peut pas changer de position et faire un «saut» vers une autre zone plus pratique pour l'atterrissage.
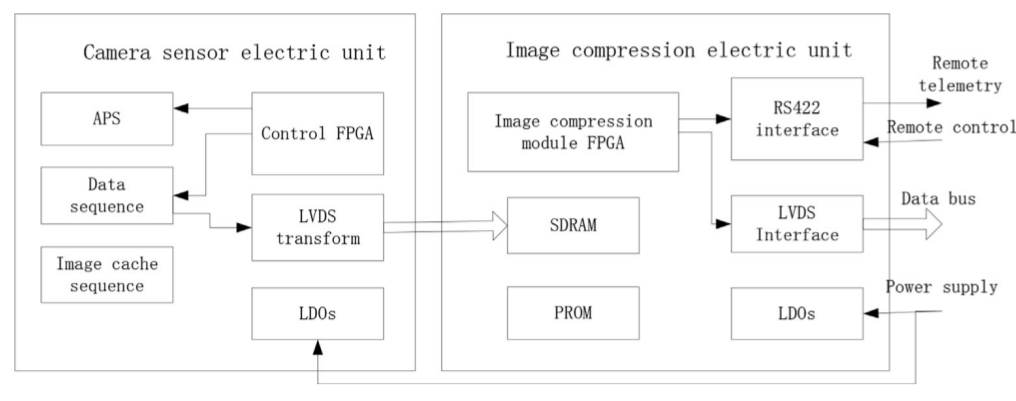
Le rover Yutu-2 possède une double caméra panoramique (Caméra panoramique - PCAM).La caméra panoramique PCAM (0,69 kg, taille 90x110x120 mm) est installée au point le plus élevé du rover Yutu-2 sur un support de mât large spécial, ce qui permet à la caméra de pivoter de 360 degrés autour de son axe pour capturer des vues panoramiques de la surface.
Étant donné que la caméra se compose de deux modules identiques, ils sont utilisés pour composer une image 3D en utilisant la méthode d'imagerie stéréo binoculaire. Pour obtenir une image couleur dans une caméra PCAM, un filtre Bayer (réseaux de filtres couleur) est utilisé.
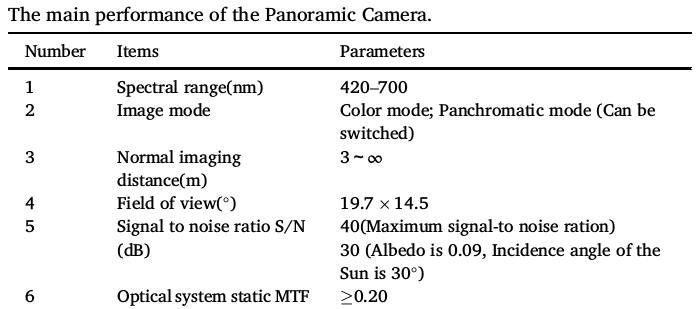
Caractéristiques de la caméra panoramique PCAM:
Le schéma de communication des éléments de la caméra panoramique PCAM:

Vue générale du panorama de surface depuis le rover Yutu-2:

Caméra PCAM sur le rover:

Le 3 janvier 2019, après que toutes les étapes de la procédure d'atterrissage réussie et l'installation de canaux de communication indépendants avec des appareils Chang'e-4 (le module d'atterrissage et le rover) ont été achevées, l'ère d'une photo de l'étude de l'autre côté de la lune a commencé.
Photos des caméras:Caméra d'atterrissage LCAM: Caméra panoramique PCAM (rover): Le rover Yutu-2 est un partenaire spatial mobile et très productif pour le module d'atterrissage Chang'e-4.
Le rover Yutu-2 a parcouru plus de 160 mètres le long de la surface complexe de l'autre côté de la lune.
Le chemin du rover Yutu-2 en trois jours lunaires:


Il est intéressant de voir comment les roues avant fonctionnent sur le rover Yutu-2 lors du virage en place:

Vidéo du lancement du rover "Yutu-2"
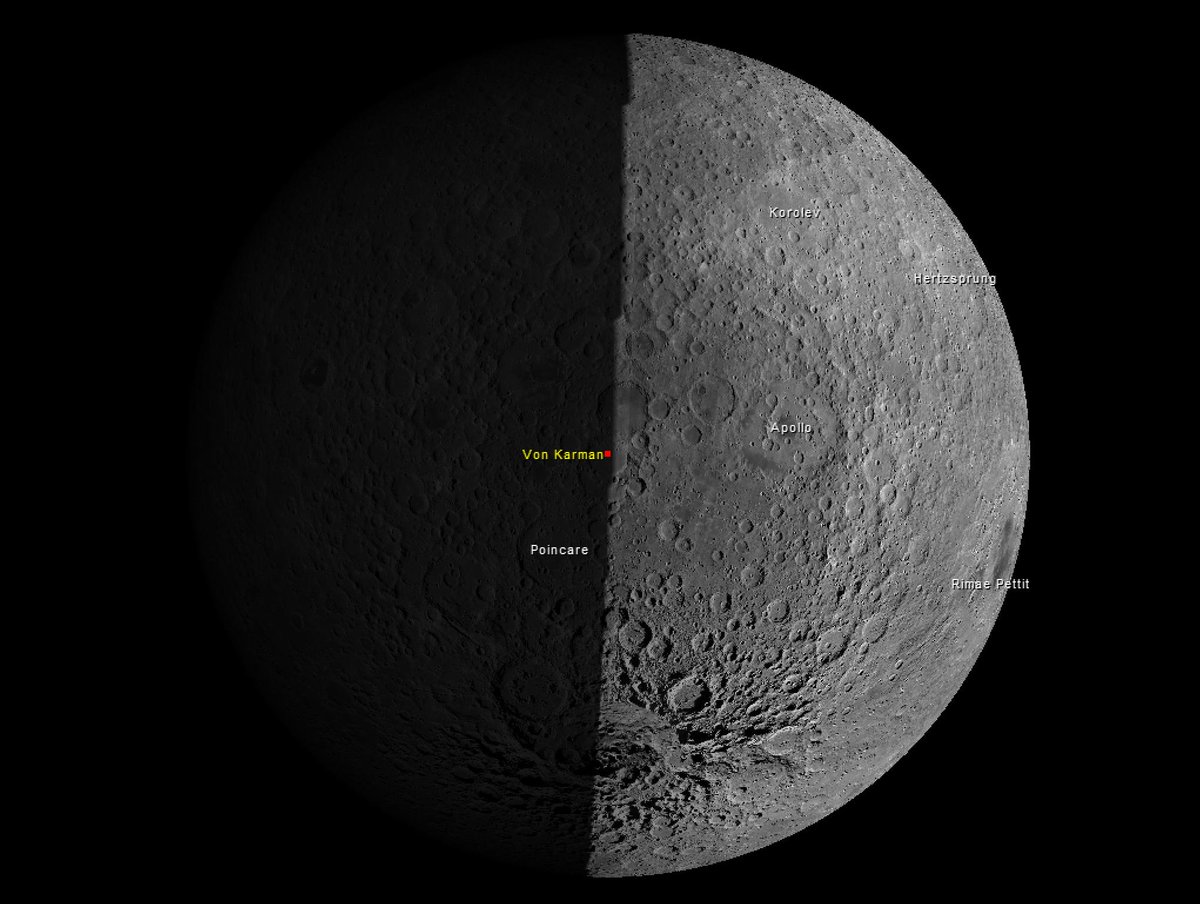
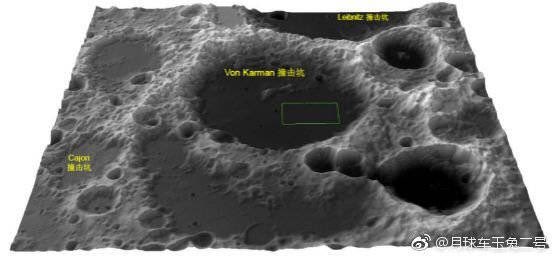
Le site d'atterrissage de la mission Chang'e-4: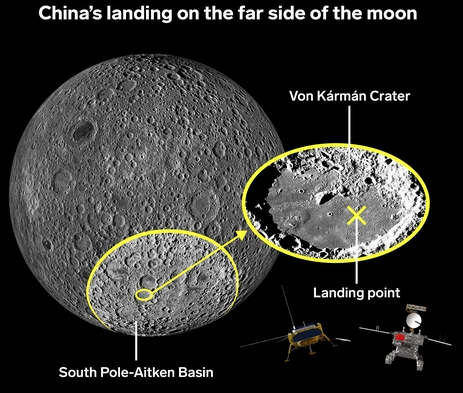
Étant donné que le verso de la lune présente également un relief plus complexe que le côté visible de la Terre, en cours de déplacement le long de la surface, le rover Yutu-2 a rencontré des problèmes moteurs et des interférences plus graves, par rapport à ceux rencontrés précédemment par son prédécesseur, le rover Yutu ", envoyé à la surface lunaire en décembre 2013.
Malheureusement, le premier rover Yutu de la mission Chang'e-3, le 25 janvier 2014, a été immobilisé techniquement (défaillance d'éléments à la suite d'une collision) après avoir franchi 114,8 mètres sur une surface lunaire complexe.
La surface lunaire dans la zone d'atterrissage du module d'atterrissage Chang'e-4 est remplie de plis, de nombreux cailloux et de petits cratères, après avoir effectué chacun de ses petits mouvements, le rover Yutu-2 devrait s'arrêter, photographier la surface autour et renvoyer ces données à la Terre via satellite répéteur.
Les scientifiques, les opérateurs du MCC et les ingénieurs sur Terre traitent ensuite ces données et tracent une nouvelle route le long de laquelle le rover Yutu-2 suivra.
Les antennes du rover Yutu-2 doivent être configurées de sorte qu'elles pointent vers un satellite répéteur pour envoyer et recevoir correctement les signaux de commande, tandis que les panneaux solaires du rover doivent être inclinés de manière optimale pour recevoir une grande quantité de lumière du soleil afin de maximiser la sortie l'électricité au moment du transfert des données.
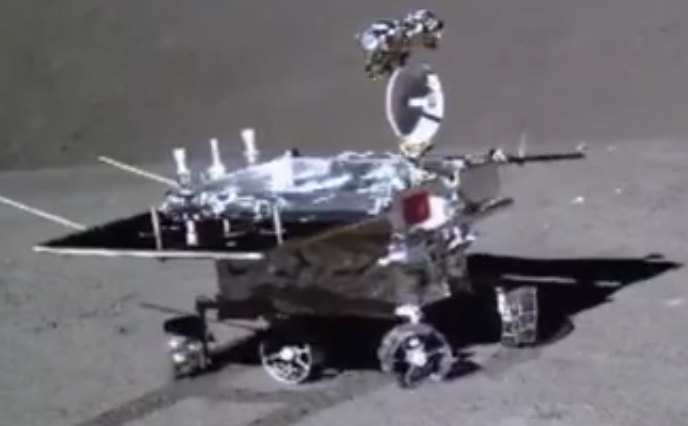
 Rover à six roues "Yutu-2":
Rover à six roues "Yutu-2":- le poids total du mobile est d'environ 140 kg (310 lb);
- capacité de charge d'environ 20 kg (44 lb);
- peut se déplacer sur les pentes et possède des capteurs automatiques pour éviter les collisions avec d'autres objets;
- Le rover est alimenté en électricité au moyen de deux panneaux solaires, ce qui permet au rover de fonctionner pendant une journée lunaire;
- vitesse maximale de 200 mètres par heure (cette vitesse sur la Lune ne peut toujours pas être atteinte - car les éléments en surface ne permettront pas d'accélérer et de désactiver le rover plus tôt);
- la zone de recherche maximale est de 3 mètres carrés. km;
- Durée estimée du travail - 3 mois (2160 heures);
- distance maximale estimée - 10 km.
Les éléments de roue du rover Yutu-2 sont en effet sa caractéristique de conception complexe qui, au stade de la conception, les ingénieurs de l'Académie chinoise des technologies spatiales ont dû affiner pendant longtemps. Ils ont refusé d'utiliser les pistes car ils se sont avérés être moins maintenables et vulnérables dans les tests.
Par exemple, si une petite pierre pénètre à l'intérieur du mécanisme de chenille, le mobile peut se coincer et perdre sa trace. Contrairement à la mise en œuvre sur roues, qui est plus fiable et a une ressource accrue, il peut également déplacer en toute sécurité des pierres jusqu'à 20 centimètres de haut.

Cependant, si le rover Yutu-2 se renverse, il ne pourra plus revenir à sa position de travail. Les panneaux solaires sur les côtés du rover lunaire sont très fragiles, ils peuvent se fissurer ou devenir poussiéreux après une chute, ce qui les rendra inutilisables.

Ainsi, dans le processus de contrôle à distance des rovers, il est nécessaire de se concentrer au maximum sur le maintien de la position du rover Yutu-2 dans un état stable et de ne pas le laisser tomber lorsqu'il se déplace le long de la surface.
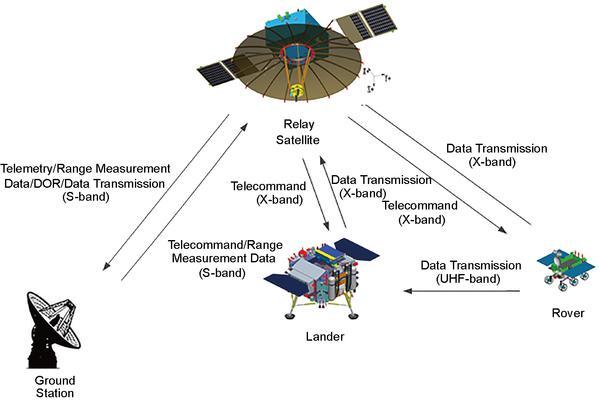
Mais comment contrôler toutes ces caméras du module d'atterrissage Chang'e-4 et du rover Yutu-2, transmettre des données et recevoir de l'énergie?À propos des contrôleurs embarqués et du système d'alimentation du module d'atterrissage et du rover.Le module d'atterrissage Chang'e-4 et le rover Yutu-2 ont à leur bord des contrôleurs de charge utile spéciaux, qui sont utilisés pour recevoir, stocker et contrôler les données scientifiques provenant de différents modules et éléments d'appareils.
De plus, les données des signaux de contrôle, des données scientifiques et photographiques utilisant les interfaces RS-422 (télémétrie et contrôle) et LVDS (données scientifiques) sont transmises aux contrôleurs centraux du module d'atterrissage et du rover, qui les transmettent via le système de communication au MCC sur Terre à l'aide d'un satellite. répéteur "Tseyuqiao".
Les contrôleurs de charge utile du module d'atterrissage Chang'e-4 et du rover Yutu-2 sont équipés d'un processeur central et de baies FPGA.
De plus, à l'aide des éléments du contrôleur de charge utile, la tension intégrée + 28 V est convertie en tension pour les alimentations secondaires + 5 V, + -15 V, + 3,3 V, ainsi que la surveillance constante des valeurs de tension et de température des modules de contrôleur et des appareils externes.
En tant que microprocesseur, les éléments suivants sont utilisés: ATMEL AT697F (processeur Rad-Hard 32 bits SPARC V8).
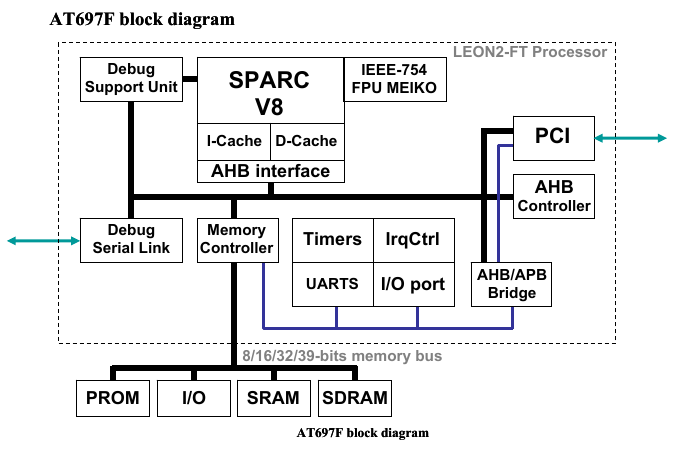
Comme les circuits intégrés logiques programmables (FPGA) sont utilisés: une matrice de six XILINX XQR2V3000-4CCG717 (FPGA Virtex-II QPro durci par rayonnement).
Pour une protection supplémentaire du microcircuit contre les radiations, des écrans en aluminium d'une épaisseur d'au moins 3,8 mm sont utilisés.
Schémas de communication et de transmission de données des équipements du module d'atterrissage de Chang'e-4: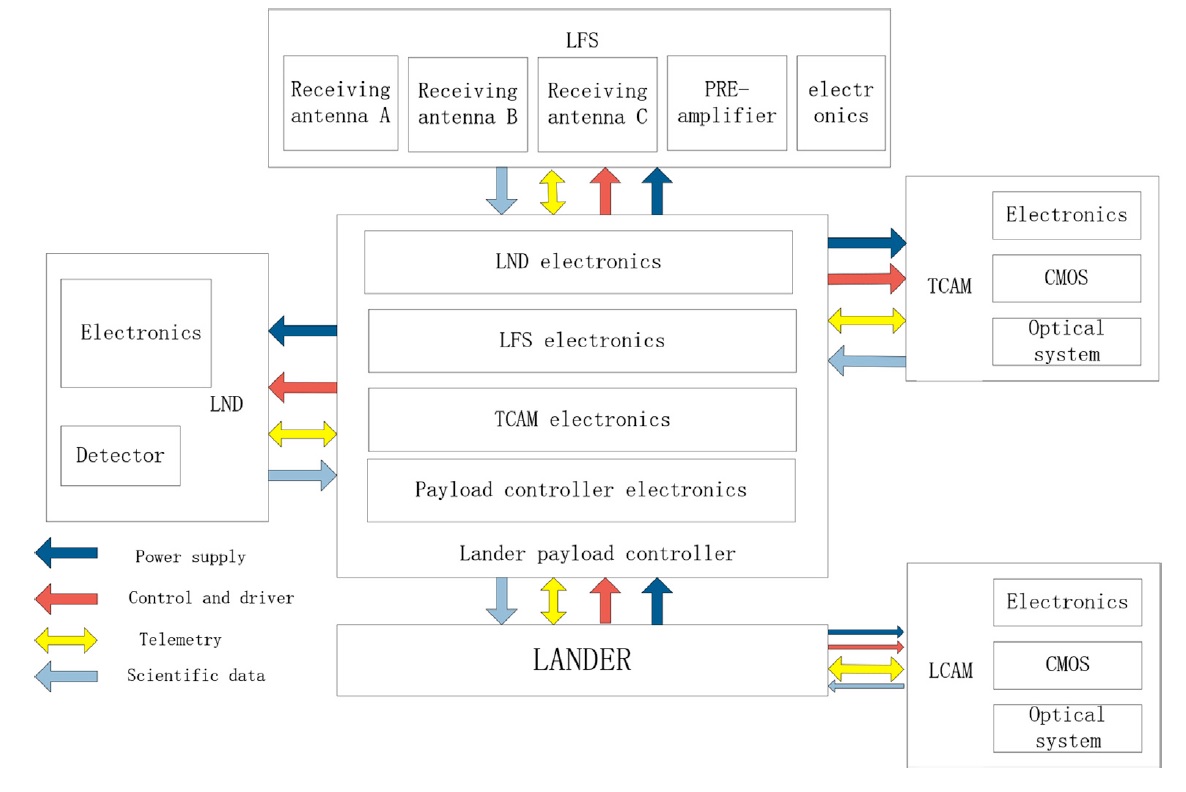
où:
- LFS - Spectromètre basse fréquence;
- LND - Neutrons lunaires et dosimétrie;
- TCAM - Caméra de terrain;
- LCAM - Caméra d'atterrissage.
Schémas de communication et de transmission de données des équipements du rover Yutu-2: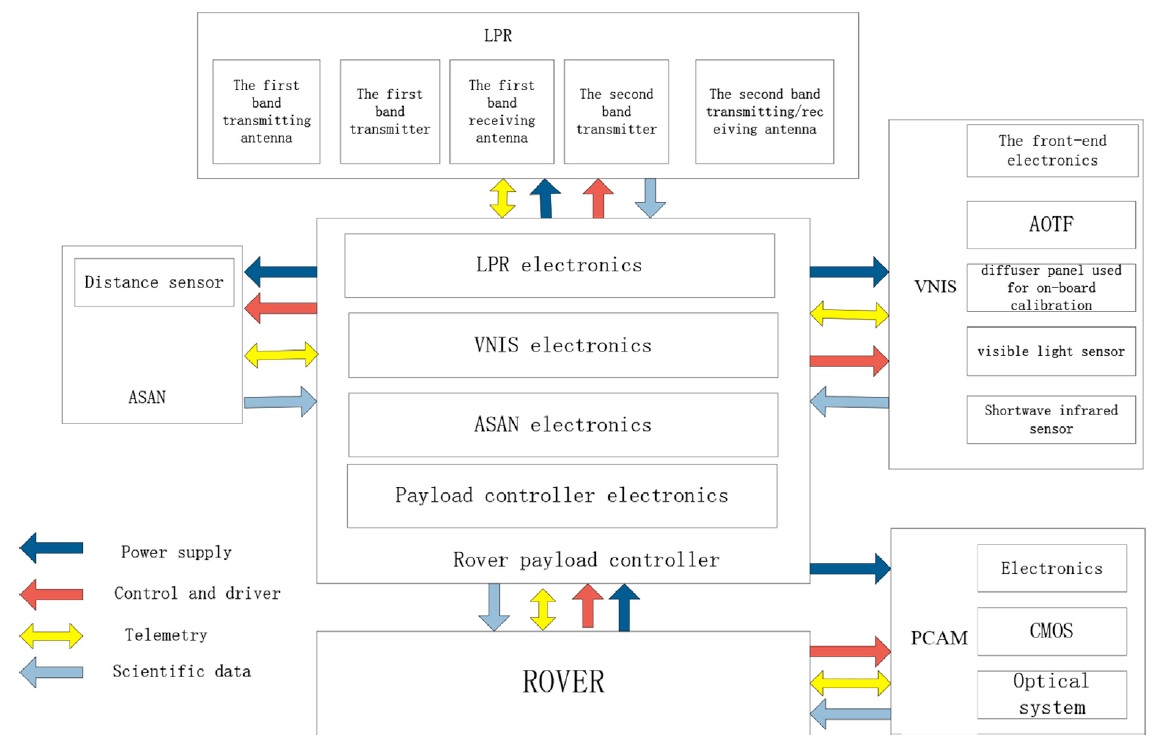
où:
- LPR - Lunar Penetrating Radar;
- ASAN - Petit analyseur avancé pour les neutres;
- VNIS - Spectromètre d'imagerie visible et proche infrarouge;
- PCAM - Caméra panoramique.
Soit dit en passant, plus tôt dans les publications, j'ai déjà parlé de presque tout l'équipement scientifique du
module de lancement et du
rover , un seul appareil scientifique restait incognito - LPR (Lunar pénétrant radar) - qui peut être vu de l'extérieur, comme deux "antennes" derrière le rover.
Je vais essayer d'écrire sur cet appareil intéressant une publication séparée.