
Dans le monde de la robotique, un cadre logiciel a été développé depuis longtemps et avec succès qui vous permet de prototyper rapidement des systèmes robotiques - Robot Operating System (ROS). Au Sberbank Robotics Laboratory, nous l'utilisons activement dans le développement de nos propres projets. Ayant acquis une certaine expérience et notant qu'il n'y a pas encore eu une seule réunion pratique sur les ROS en Russie, nous avons décidé de l'organiser et de partager nos connaissances, tout en faisant connaissance avec la communauté de la robotique. ROS Russian Meetup 2019 se tiendra dans le cadre du Forum Skolkovo Robotics 2019 à Skolkovo le 16 avril, c'est l'occasion pour les développeurs ROS et la robotique de tous niveaux de consacrer une journée à un échange d'expérience et de communication en direct avec la communauté. Si vous connaissez ROS, vous pouvez accéder en toute sécurité au
formulaire d'inscription , le programme et les informations organisationnelles y sont également placés. Lors de la réunion, nous discuterons de l'histoire de ROS et des principes de la communauté, consacrerons beaucoup de temps à des rapports pratiques sur SLAM et la navigation lidar laser intérieure, et à un planificateur de trajectoire de robot. Nous montrerons comment contrôler les manipulateurs industriels via ROS, comment utiliser les données des capteurs, comment travailler avec la machine d'état SMACH. Et nous vous dirons même comment installer ROS sans problème et commencer à développer un robot.
Soit dit en passant, la participation à la réunion est gratuite, mais comme le nombre de places est limité, nous vous demandons d'attendre la confirmation. Et pour ceux qui ne connaissent pas ROS, nous offrons un petit aperçu.
 Vue bidimensionnelle du monde à travers les yeux de ROS
Vue bidimensionnelle du monde à travers les yeux de ROSRobot Operating System est un cadre logiciel pour robots qui implémente les algorithmes de base pour la construction de robots complexes. Il comprend un ensemble d'outils, de bibliothèques et de normes conçus pour simplifier la tâche de création d'un comportement de robot complexe et fiable sur une grande variété de plates-formes robotiques.
L'idéologie principale du projet est les principes de l'open source, la documentation des packages, la réutilisation du code et la communauté mondiale de la robotique.
Pourquoi a-t-il été créé
Il est difficile de créer un logiciel robotique vraiment fiable et universel. Du point de vue du robot, des problèmes qui semblent insignifiants pour la personne se traduisent par la grande complexité de la programmation du système robotique par le développeur. Il est si difficile de travailler avec ces tâches qu'il n'est parfois pas possible de les résoudre seul ou en petite équipe.
En conséquence, ROS a été créé à partir de zéro pour stimuler le développement de logiciels collaboratifs pour la robotique. Par exemple, un laboratoire peut avoir des experts SLAM intérieurs et peut offrir un système SLAM de classe mondiale. Un autre groupe pourrait avoir des experts dans l'utilisation de SLAM pour la navigation, et un autre groupe pourrait développer une approche de vision par ordinateur qui fonctionne bien pour reconnaître les petits objets dans un environnement en désordre. ROS a été spécialement conçu pour que ces groupes collaborent et s'appuient sur le travail des autres.
Contexte court
ROS est un grand projet avec une histoire et un grand nombre de participants. De nombreux membres de la communauté de la recherche en robotique avaient besoin d'un système de collaboration ouvert et de nombreux projets ont été créés à cet effet.
Au milieu des années 2000, l'Université de Stanford a fait divers efforts liés à l'utilisation de l'IA en robotique, par exemple, le programme STanford AI Robot (STAIR) et le programme Personal Robots (PR) pour créer des prototypes personnalisés de systèmes logiciels dynamiques conçus pour être utilisés en robotique. . En 2007, Willow Garage a fourni des ressources importantes pour développer davantage ces concepts et créer des prototypes. Les efforts ont été soutenus par d'innombrables chercheurs qui ont partagé leur temps et leur expérience à la fois pour contribuer aux idées de base de ROS et aux principaux progiciels. Tous les logiciels ont été développés à l'aide de la licence open source BSD et sont progressivement devenus une plate-forme largement utilisée dans la communauté des chercheurs en robotique.
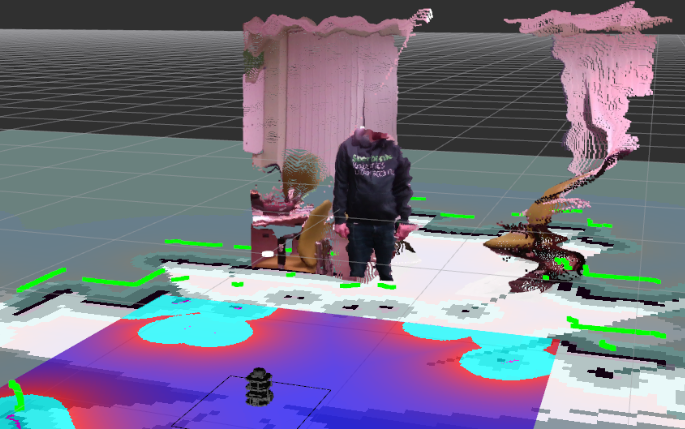 Vision du monde en trois dimensions à travers les yeux de ROS
Vision du monde en trois dimensions à travers les yeux de ROS
Communauté mondiale de ROS
Dès le début, ROS a été développé dans plusieurs institutions et pour plusieurs robots, y compris de nombreuses institutions qui ont reçu des robots PR2 de Willow Garage. Bien qu'il soit beaucoup plus facile pour tous les participants d'héberger leur code sur les mêmes serveurs, au fil du temps le modèle «fédéré» est devenu l'une des forces de l'écosystème ROS. Tout groupe peut exécuter son propre référentiel de code ROS sur ses propres serveurs, le posséder et le contrôler complètement. Ils n'ont besoin de la permission de personne. S'ils décident de rendre leur référentiel accessible au public, ils peuvent gagner la reconnaissance de la communauté qu'ils méritent pour leurs réalisations et bénéficier de testeurs et de suggestions d'amélioration, comme tous les projets open source.
Au cours des dernières années, ROS a grandi et comprend maintenant une grande communauté d'utilisateurs à travers le monde. Historiquement, la plupart des utilisateurs ont été dans des laboratoires de recherche, mais ils apparaissent de plus en plus dans le secteur commercial, notamment en robotique industrielle et de service.
La communauté ROS est très active et compte plus de 3 000 membres sur la liste discourse.ros.org, plus de 8 000 utilisateurs sur le wiki de documentation conjointe et environ 22 500 utilisateurs sur le site pour les réponses aux questions ROS. Wikipedia contient plus de 22 000 pages et le rythme des modifications est d'environ 30 par jour.
À l'heure actuelle, le nombre d'utilisateurs de ROS russophones est au 15e rang parmi d'autres pays selon le rapport ROS Metrics 2018. Rencontrons-nous, discutons-en et corrigeons-le. Vous pouvez également en apprendre davantage sur les capacités ROS de vos projets, sur la pratique réelle du développement de robots.
Pour participer en tant qu'auditeur, remplissez le
formulaire .
Et si vous avez un message intéressant pour la communauté,
vous pouvez toujours
devenir un orateur .
Programme: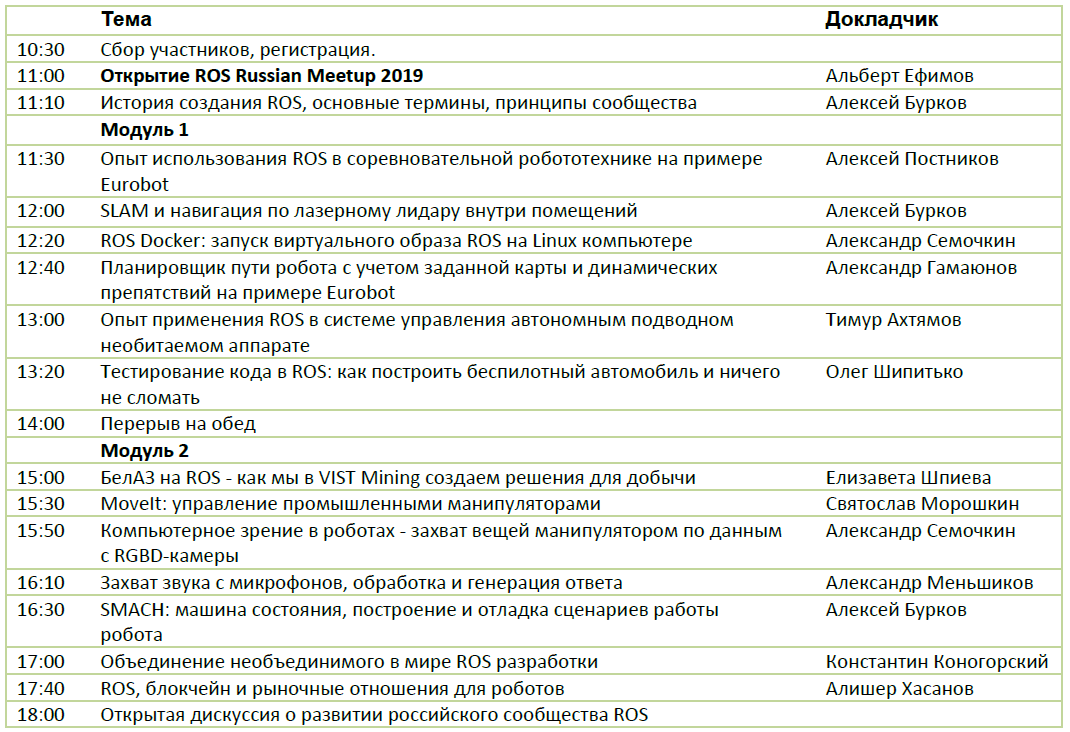
L'événement est organisé par le laboratoire de robotique Sberbank.