Dans la
première partie, nous avons décrit le processus de développement d'une version test d'un module télémètre sous-marin. Le moment est venu de partager des informations sur la deuxième version du module, puisque nous avons implémenté les modifications proposées dans le premier article.
Changement n ° 1: Contrôle automatique temporaire du gain (GAM).Lors du test de la première version du module, le problème de la décroissance du signal réfléchi des obstacles situés à proximité de l'émetteur a été clairement souligné. Certains commentateurs d'un article précédent ont recommandé un VARU. Oui, l'utilisation de VARU était très appropriée. Maintenant, dans les premiers instants après l'envoi d'une impulsion de sonde, il est possible de minimiser le gain et de l'augmenter avec le temps.
La mise en œuvre de la VARU est illustrée dans le schéma n ° 1.
Le DAC du microcontrôleur génère une tension appliquée à la grille du transistor Q4.
Pour le transistor appliqué, la caractéristique de l'atténuation introduite est obtenue expérimentalement, en fonction de la tension à la grille. Sur la base de cette caractéristique et des paramètres environnementaux spécifiés par l'utilisateur, une table de valeurs est calculée, qui est envoyée via DMA au DAC du microcontrôleur.
En fait, le transistor, fonctionnant en mode linéaire, ferme partiellement le signal utile de la sortie du premier étage de l'amplificateur à la masse, régulant ainsi l'amplitude du signal allant aux étages suivants de l'amplificateur.
 Changement n ° 2: Boost Converter pour alimenter l'étage de sortie.
Changement n ° 2: Boost Converter pour alimenter l'étage de sortie.Schéma numéro 2. Ici, tout est simple. Le convertisseur boost nous permet de rendre notre émetteur un peu «plus fort». Vous pouvez régler la tension d'alimentation de l'étage de sortie de 5 à 16 volts. Chose utile pour les mesures à longue distance.
Changement n ° 3: gyroscope / accéléromètre MEMS.Numéro de schéma 3. Puce ICM20602 intégrée. Cela permettra d'obtenir non seulement des informations sur les niveaux de réflexion des objets sur le trajet des rayons, mais aussi sur la direction (angle) où le module regarde à ce moment. Après avoir effectué le scan le plus simple du module (même en tournant le module avec votre main), vous pouvez obtenir une image réaliste de l'objet à scanner selon le principe de la formation d'image par lidar.
Les changements devraient également inclure l'utilisation d'un amplificateur moins cher mais pas pire MCP669-E / ML. Les pilotes de portail ont également sélectionné le moins cher du TPS51604DSGR disponible.
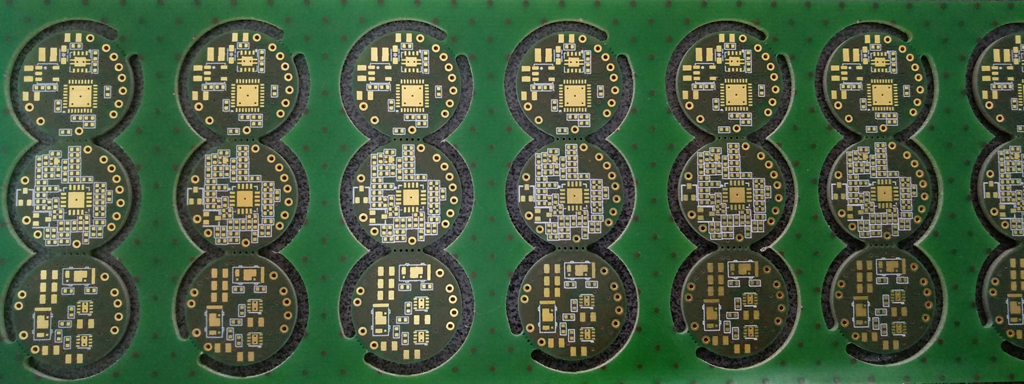
La forme des cartes de circuits imprimés est ronde, pour un placement plus rationnel à l'intérieur du boîtier métallique.
Pour la compacité et la constance des caractéristiques de copie en copie, le transformateur est fabriqué selon la technologie planaire.
Le fer est prêt. Et ensuite? La meilleure heure de programmeurs arrive!
Bien que la fonctionnalité basique de base ait déjà été testée en cours (gestion des pilotes, utilisation des ADC, DAC, etc.), vous devez toujours implémenter une interaction pratique avec l'hôte, créer et décrire en détail l'API qui donne accès à toutes les capacités du module. Permettez-moi de vous rappeler que nous avons choisi UART comme interface physique à ces fins. Et ici, il convient de mentionner qu'il y avait un désaccord dans l'équipe sur le type de protocole sur lequel il vaut la peine de s'attarder: texte ou binaire. D'une part, le protocole binaire est rapidité, facilité de traitement côté hôte. D'un autre côté, le protocole texte facilite l'analyse de l'échange de données (même dans l'Hyperterminal) et l'utilisation de commandes / réponses de module significatives. Voici un petit exemple d'interaction avec le module à l'aide de commandes texte dans le terminal Putty:
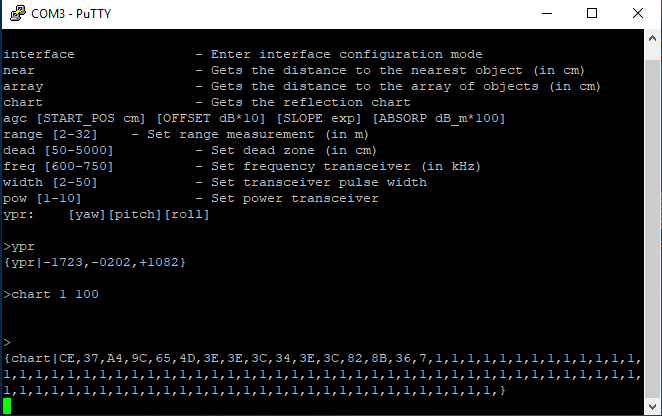
En appuyant sur la touche TAB, une liste de toutes les commandes s'affiche.
Un exemple est donné de l'utilisation de la commande YPR, qui renvoie la valeur actuelle de la direction du module le long de trois axes (angles d'Euler).
La commande CHART renvoie la valeur du signal réfléchi des objets sur le chemin de l'impulsion de sonde. Vous pouvez définir la résolution de la mesure (jusqu'à présent en centimètres) et le nombre de mesures.
Bien sûr, le cas idéal est la prise en charge des deux versions du protocole, à la fois textuelles et binaires. Mais nous, malheureusement, sommes limités dans le temps, et nous aimerions diriger immédiatement les efforts vers une option plus acceptable pour les utilisateurs. D'où une modeste demande: cochez l'option de vote qui vous conviendrait le mieux.
Pour le prochain article, nous allons essayer d'utiliser toutes les fonctionnalités du module afin de pouvoir numériser des objets sous-marins et obtenir une image avec les contours de ces objets.
PSLes opinions concernant le contenu du deuxième article au sein de l'équipe étaient partagées: sec, un peu, mais maintenant, soit de manière généreuse, magnifique, mais alors ... "Maintenant" a gagné.
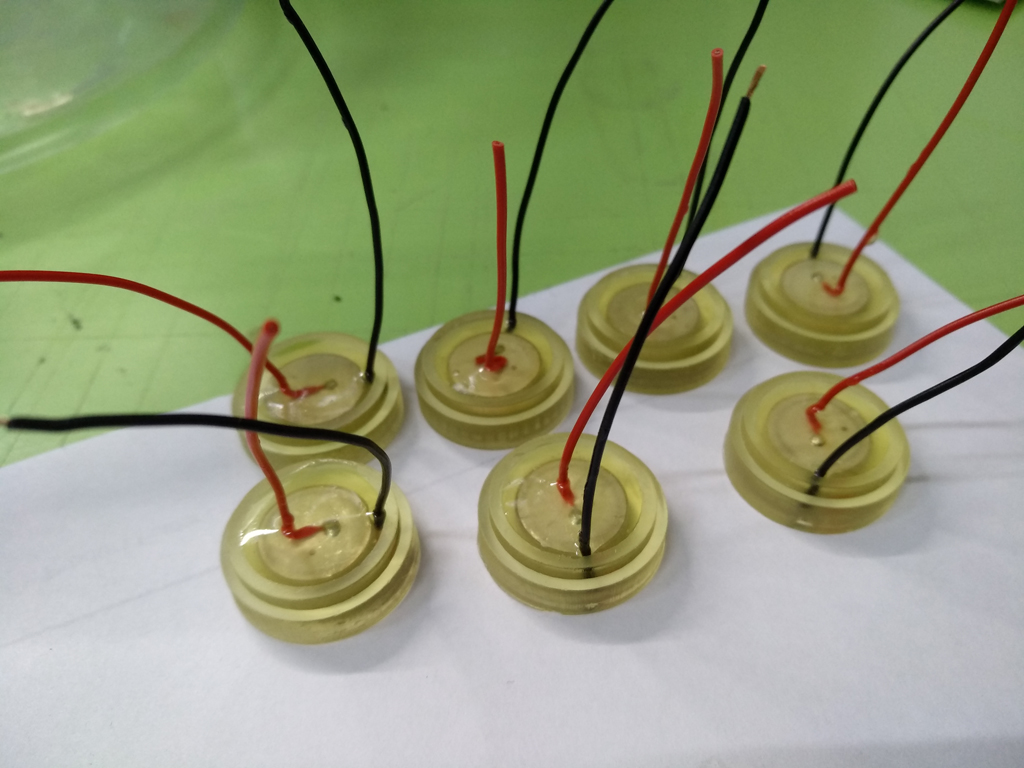
Je vais diluer la sécheresse du texte avec quelques photos qui ont été prises lors du processus de fabrication de la deuxième version du module.
Ensemble émetteur
Boîtiers en métal usiné

Boîtiers marqués au laser

Assemblage des cartes de modules
