Bonjour à tous! Le développement de l'hexapode est en voie d'achèvement de la première version de combat, et il est maintenant temps de décrire tout son remplissage électronique. J'ai également ajouté HC-SR04 pour détecter les obstacles qui manquaient tellement de satisfaction visuelle dans l'apparence de l'hexapode. Il y aura une petite nouvelle vidéo et vous aurez la chance de me donner un coup de pied électronique.
Stades de développement:Partie 1 - ConceptionPartie 2 - AssemblagePartie 3 - CinématiquePartie 4 - Trajectoires et séquences mathématiquesPartie 5 - ÉlectroniquePartie 6 - transition vers l'impression 3DPartie 7 - Nouveaux logements, logiciels d'application et protocoles de communicationVoir avec HC-SR04 installé Initialement, le boîtier a été conçu pour des cartes d'alimentation et de contrôle distinctes, de sorte que l'un soit placé au centre du boîtier plus près de la batterie, et le second est mis en place pour faciliter le débogage. Et donc commençons.
Unité de contrôle
L'unité de contrôle est le «cerveau» de l'hexapode basé sur le contrôleur SAM3X8E et se compose de deux cartes: une carte avec un contrôleur et une carte de distribution. La carte avec le contrôleur est déjà utilisée (photo ci-dessous), mais la carte de distribution devra être fabriquée. Peut-être qu'à l'avenir, je commanderai une carte à l'usine avec une place pour le contrôleur pour retirer le sandwich.
Le but principal du tableau de distribution est d'alimenter les périphériques "légers", le contrôleur et de distribuer les signaux entre ses broches. J'ai compilé une liste de mes exigences pour ce forum:
- Possibilité d'installer sur la carte HLK-RM04 (convertisseur UART-WIFI);
- Possibilité de connecter l'écran I2C;
- Possibilité de connecter HC-SR04;
- Capacité de mesurer la tension de la batterie = tension d'alimentation de la carte;
- Capacité de mesurer la tension d'alimentation périphérique et HLK-RM04;
- Connectez le tweeter pour indiquer la décharge de la batterie;
- Indication LED de l'état du système: quelque chose d'important est tombé (la configuration est incorrecte ou autre), quelque chose de peu important est tombé (affichage par exemple), tout est OK;
Ayant décidé un peu de la base élémentaire et appréciant les possibilités de mon nid avec de la poudre libre, j'ai commencé immédiatement à câbler la carte sans créer son schéma de circuit. Cela a fonctionné la première fois et je n'ai trouvé aucun jambage dans le travail. Le câblage est le suivant:
Il a spécialement élargi les rails pour qu'il n'y ait pas de problèmes dans le processus de fabrication. J'ai décidé de faire une planche avec LUT, ça s'est bien passé avec seulement 2 fois. Sous le spoiler de la photo pour comparer les options infructueuses et réussies (à gauche infructueuses, à droite réussies).
Eh bien, alors tout est conforme aux instructions - nous tromper la planche, percer des trous et jeter des composants. Le résultat ne tarde pas à venir:
HLK-RM04 est inséré au centre, une boucle vers la carte d'alimentation est insérée dans le peigne à droite, l'alimentation est fournie à gauche. La tension sur la carte est mesurée par un simple diviseur de tension. Pendant le fonctionnement à long terme (30–40 minutes), le régulateur de tension pour HLK-RM04 chauffe considérablement et je viens de mettre un radiateur.
Carte de puissance
La consommation totale de courant (crête) des disques est d'environ 30 A (en moyenne ~ 1,3 A par disque) sous une charge élevée, lors de la marche 10-13A, au repos - 5-6A. Les mesures ont été effectuées empiriquement avec un multimètre.
J'ai décidé de séparer la puissance de chaque variateur en fonction de régulateurs de tension linéaires, c'est-à-dire 18 régulateurs de tension linéaires - un pour chaque variateur. En tant que régulateurs linéaires sont utilisés LM317D2T-TR configuré pour sortir 5V. Il y a plusieurs raisons d'utiliser 18 régulateurs de tension linéaires et d'utiliser des régulateurs en principe:
- Vous ne pouvez pas connecter directement les variateurs à la batterie, pour eux la tension d'alimentation maximale autorisée est de 6V;
- Indépendance relative de la vitesse \ efforts des entraînements par rapport à la tension d'entrée;
- Les régulateurs linéaires sont empilés. Je leur ai acheté une fois un paquet de 70 pièces sur Ali (l'article a apporté la plus grande contribution à la solution);
- Je n'ai pas trouvé de régulateur de tension linéaire pour un tel courant;
- Je n'ai pas trouvé de circuit DC-DC compact et léger pour un tel courant;
- La possibilité de connecter les régulateurs en parallèle est plutôt douteuse;
- L'option «régulateur linéaire + transistor amplificateur» prive le circuit de puissance de toutes les fonctions de protection qu'offre le régulateur linéaire (du moins c'est ce que les gens écrivent et dans ce cas je suis d'accord avec eux);
- Je suis assez pauvre dans la conception d'alimentations à découpage;
La planche est très simple et je n'ai pas commencé à lui dessiner un schéma de circuit, et l'envie de voir rapidement le résultat s'est également fait sentir. Le câblage est le suivant:
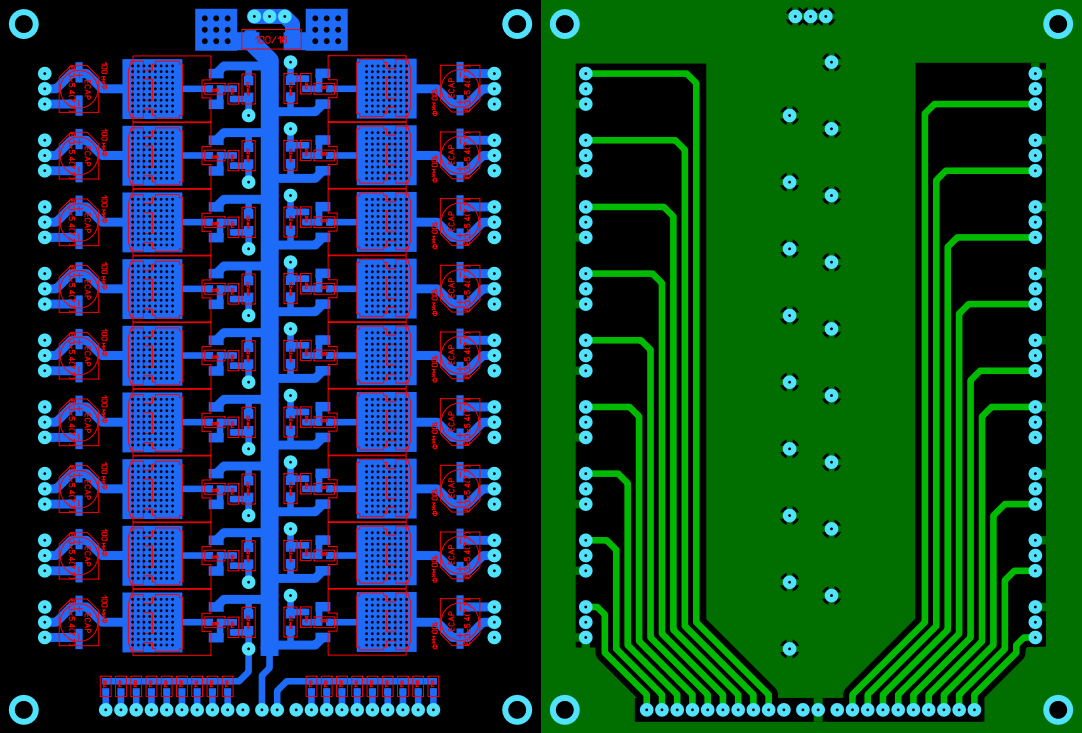
Au-dessus, il y a des plots de contact pour souder les fils de la batterie, sous le peigne pour un câble et l'alimentation de l'unité de commande, et sur les côtés sont connectés des lecteurs. Dans un premier temps, je voulais aussi permettre de mesurer la quantité de courant consommée par chaque servo variateur et mesurer la température de la carte, mais j'ai décidé de ne pas encore compliquer les choses.
La planche était simple et fiable, il n'y a rien à casser. Tests de charge conduite à une tension d'entrée de 11,1 V (3S LiPo) et 7,4 V (2S LiPo). À une tension d'entrée de 11,1 V, comme prévu, les contrôleurs étaient trop chauds et la protection de température a été déclenchée en marchant (le radiateur n'a pas enregistré, et les contrôleurs SMD aussi), ce qui m'a forcé à baisser la tension d'entrée. À une tension de 7,4 V, les régulateurs sont chauds et en cas de marche prolongée, la protection ne fonctionne plus - c'est ce dont vous avez besoin.
La planche a également fait du LUT et cela s'est plutôt bien passé la première fois. Malheureusement, il n'y a qu'une photo de la version expérimentale de la carte, et je ne voulais pas vraiment retirer la nouvelle pendant environ 4 heures quelque part et je ne voulais pas la démonter à des fins de photographie (environ 70% du boîtier doit être démonté). La différence entre l'ancien et le nouveau ne réside qu'en l'absence de trous dans la ligne médiane de la planche (des expériences amusantes ont été menées).
Quelques vidéos
Test de performance HC-SR04
L'attitude de mon chat envers l'hexapode
La première promenade dans la rue