La fin de soirée du 11 avril 2019 a été le point de départ du lancement d'un nouveau projet, «Bereshit 2.0», car l'accident du premier appareil privé alors qu'il tentait d'atterrir sur la lune n'a fait que rendre furieux les ingénieurs et l'organisation SpaceIL.
L'espace est cruel et la lune ne se permet pas immédiatement de s'asseoir. Mais avec l'expérience et la technologie moderne, chaque nouvelle tentative devient plus réussie.
Documents précédemment publiés sur la mission Bereshit: Quels succès ont été obtenus par la mission Bereshit?En bref sur la mission Bereshit: 8 ans de développement, le projet a coûté 100 millions de dollars, 200 scientifiques et ingénieurs bénévoles, 47 jours de vol et plus de 6,5 millions de kilomètres ont été surmontés, au démarrage de 380 kilos de carburant, un moteur LEROS 2b forcé, 6 chambres embarquées , un magnétomètre, un réseau de réflecteurs d'angle laser et 1 tentative d'atterrissage, dans laquelle un appareil de 150 kilogrammes avec 76 kilogrammes de carburant (hydrazine) dans des réservoirs à grande vitesse, volant loin de la zone de l'atterrissage prévu, est tombé à la surface de la lune.
L'appareil Bereshit était en orbite autour de la Lune et a utilisé un magnétomètre lors de l'atterrissage et a transmis au MCC certaines des données scientifiques sur le champ magnétique de la lune.
Aujourd'hui, Israël est le 7e pays à avoir lancé son vaisseau spatial en orbite autour de la Lune (et l'a maintenu là pendant 7 jours).La liste des pays (leurs premiers appareils sont comptés) avec des appareils en orbite de la lune:1. Luna-10, URSS, 1966;
2. Lunar Orbiter 1, États-Unis, 1966;
3. Hagoromo, Japon, 1990;
4. SMART-1, ESA, 2005;
5. Chang'e-1, Chine, 2007;
6. Chandrayan-1, Inde, 2008;
7. Bereshit, Israël, 2019.
Et pourtant, maintenant Israël est le 7ème pays à avoir laissé tomber son vaisseau spatial sur la surface lunaire (quoique pendant le processus d'atterrissage, qui s'est transformé en un crash fatal incontrôlable).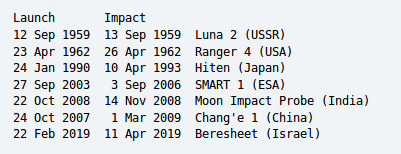
On suppose que le diamètre du cratère formé après être tombé de 3 à 5 mètres. L'appareil Bereshit s'est écrasé dans la surface lunaire à un petit angle (~ 8 °), le cratère peut être allongé.
Le coût des composants de l'appareil Bereshit (
photo prise d'ici ):

Les principales caractéristiques de la mission et du véhicule lunaire "Bereshit":- début de la mission: 22 février 2019;
- fin de mission: s'est écrasé à la surface de la lune lors de la dernière étape de l'atterrissage le 11 avril 2019;
- la trajectoire de mouvement vers la Lune (en fait, le maximum possible): complexe, modifiable en effectuant une série de manœuvres (allumer les moteurs pendant plusieurs secondes voire minutes) pour augmenter l'apogée de sa sellerie elliptique après chaque orbite autour de la Terre;
- la hauteur de l'appareil Bereshit est d'environ 1,5 mètre, un diamètre de 2 mètres (2,3 mètres entre les supports d'atterrissage);
- poids 530 kilogrammes avec du carburant (poids du carburant - 380 kg), 150 kg sans carburant;
- moteur principal: modification de LEROS 2b;
- L'élément principal de l'ordinateur de bord: processeur dual-core Gaisler HiRel GR712RC;
- Six caméras 8 mégapixels Imperx Bobcat B3320C avec optique Ruda;
- instruments scientifiques: magnétomètre, réseau de réflecteurs d'angle laser.
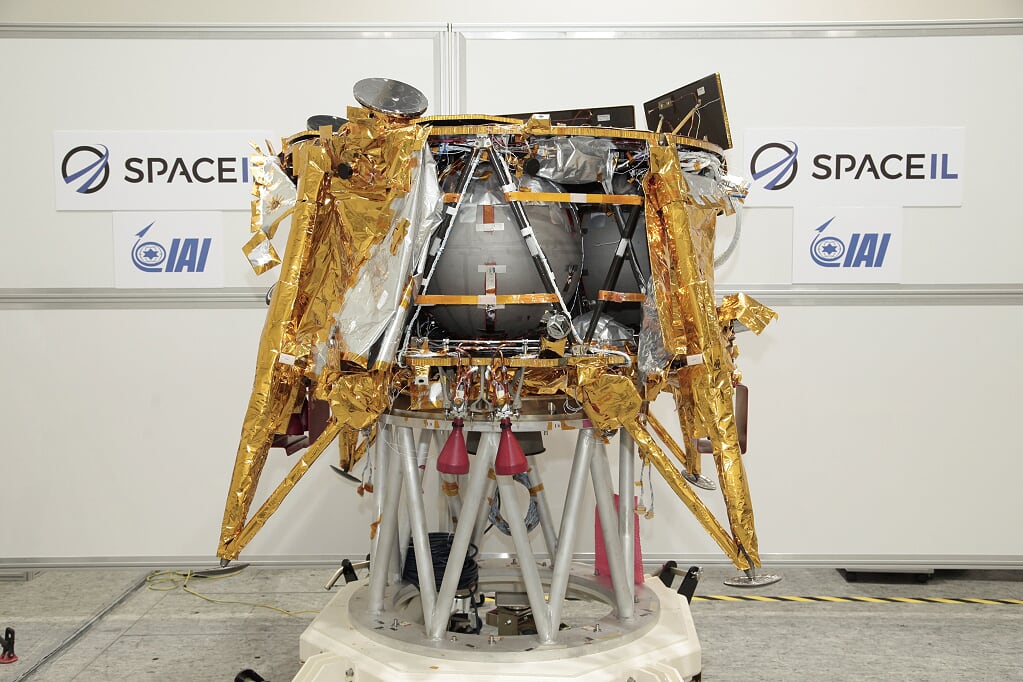
Le dispositif Bereshit a été développé par des organisations SpaceIL, qui sont soutenues principalement par des investisseurs privés, dont le magnat américain Sheldon Adelson et le milliardaire Morris Kahn, qui sont également co-fondateurs d'Amdocs (DOX), l'une des plus grandes entreprises d'Israël.
Il est impossible d'envoyer l'appareil lunaire dans l'espace par les forces et les moyens d'une seule petite entreprise privée, mais avec l'aide de la communauté spatiale internationale, vous pouvez transformer l'idée en un projet à part entière en cours de mise en œuvre.
Participants au projet impliqués dans la mission Bereshit:- Une équipe de jeunes scientifiques et ingénieurs israéliens de SpaceIL,
- NASA (USA),
- ISA (Agence spatiale israélienne),
- IAI (Israel Aviation Industry Concern),
- Spaceflight Industries (USA, organisateur du lancement de l'engin Bereshit en orbite),
- société SpaceX (USA, fusée d'appoint Falcon 9),
- Swedish Space Corporation (Swedish Space Corporation),
- société Cobham (Suède),
- société Ramon Chips (Israël).

Après tout, SpaceIL est une petite organisation selon les normes mondiales, elle emploie environ 200 personnes, et la plupart d'entre elles sont des scientifiques et des ingénieurs bénévoles qui "cherchent à promouvoir le développement du progrès technologique et scientifique en Israël".
Que s'est-il passé lors de l'atterrissage de l'appareil Bereshit le 11 avril 2019?En fait, les problèmes avec l'appareil Bereshit ont commencé presque immédiatement après le lancement.
Février 2019:
Ensoleillement des capteurs de la position de l'appareil (les capteurs étaient très sensibles à de tels "éblouissements"), ce qui peut affecter l'orientation de l'appareil dans l'espace.
Solution: une compensation logicielle a été effectuée pour traiter les données des capteurs et réduire leur sensibilité, plusieurs vérifications supplémentaires des nouvelles données des capteurs de l'appareil ont été effectuées.Au stade de la préparation, avant d'effectuer la deuxième manœuvre de moteur, l'ordinateur de bord Bereshit a redémarré de manière inattendue et l'étape d'exécution de la manœuvre a été automatiquement annulée. Les ingénieurs de SpaceIL et IAI ont commencé à analyser la situation.
Il y avait un problème à bord qui limitait la maniabilité de l'appareil.
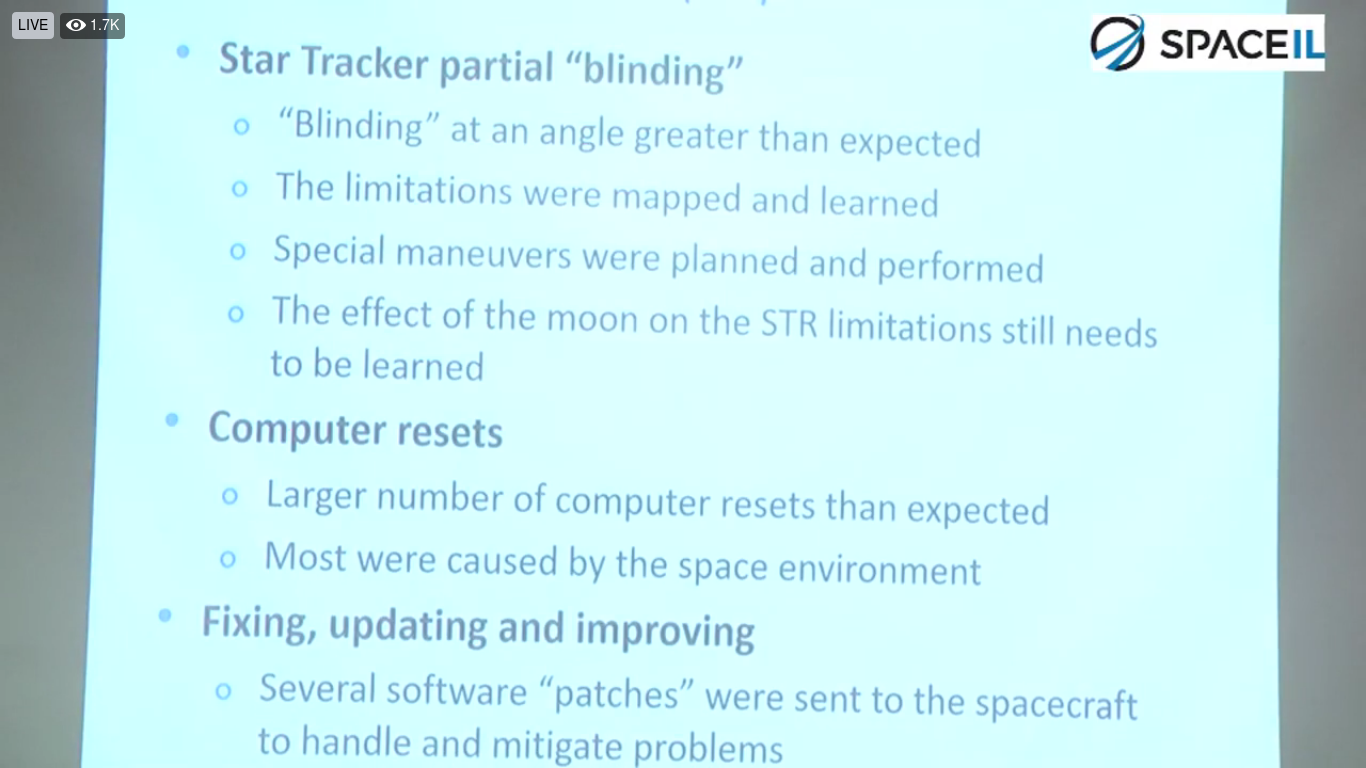
Solution: les ingénieurs de SpaceIL et IAI ont corrigé la défaillance du système informatique de l'appareil Bereshit, maintenant l'appareil Bereshit continue son vol vers la Lune en mode normal.De plus, SpaceIL n'a pas annoncé de nouveaux dysfonctionnements ou problèmes avec l'appareil Bereshit , cependant, avant les manœuvres lunaires, le rapport comportait une telle diapositive sur laquelle il y avait plus d'un redémarrage / échec de l'opération en Colombie-Britannique - plusieurs et même plus que les ingénieurs ne l'avaient prévu. , et en raison de l'environnement spatial difficile.
Problèmes et solutions qui étaient dans l'espace (il s'avère qu'il y a eu de nombreux redémarrages du BC):
Ainsi, on pourrait s'attendre à ce qu'après 1128 heures de vol (47 jours), des problèmes avec les composants internes de l'appareil Bereshit puissent devenir mortels, et leur correction est impossible si les éléments échouent ou fonctionnent anormalement sous une charge sévère et sous l'influence de l'environnement spatial.
L'atterrissage de l'appareil sur la lune est un processus complexe dans lequel l'ordinateur de bord effectue une grande quantité de tâches: contrôler les modes de fonctionnement des moteurs, analyser la télémétrie et les données des capteurs (position, altitude, vitesse, atterrissage, etc.), ajuster la position actuelle de l'appareil en fonction du chemin d'atterrissage et coordonnées réelles, consommation adaptative de carburant, transmission de données à l'aide d'un système de communication.
Et si une situation d'urgence survient avec un ou plusieurs capteurs lors de l'atterrissage, ce moment peut être compensé automatiquement s'il y a un circuit de secours, ou en redémarrant (redémarrant) le système informatique de bord s'il y a du temps pour ce processus.
En mode manuel et en temps réel, les ingénieurs du centre de contrôle ne contrôlaient pas l'appareil Bereshit, l'ordinateur de bord a atterri, après que l'appareil a quitté le "point de non-retour", alors qu'il suffisait d'effectuer la procédure d'atterrissage, dont les commandes avaient été reçues précédemment par l'ordinateur de bord.
Mais pour prendre en compte la situation et compenser les problèmes lorsque plusieurs éléments échouent en cascade, puis en raison de leurs défaillances, les principaux composants de l'appareil (moteurs, systèmes de télémétrie, ordinateur de bord) vont s'éteindre - c'est également difficile pour un appareil de ce niveau (sans systèmes de contrôle redondants) ), comme l'a montré la pratique, est impossible.
Que sait-on d'autre sur les composants matériels et logiciels de l'appareil Bereshit- un (1) moteur à poussée 430N et huit (8) moteurs à poussée 25N. Des moteurs de manœuvre ont été utilisés lors de l'atterrissage pour aider le principal;
- La température de l'électronique est maintenue dans la plage de -10 ° C à + 40 ° C. La majeure partie de l'électricité est dépensée pour chauffer l'électronique (pas de système de refroidissement);
- l'ordinateur de bord est un (1), non dupliqué;
- le capteur en étoile pour l'orientation de l'appareil Bereshit est équipé d'un cône noir pour absorber les rayons tiers, cependant, lorsque l'appareil Bereshit a été séparé des satellites après le démarrage, il s'est avéré que le cône était sale, les ingénieurs ont fait face à ce problème, découvrant quels angles de réflexion ne se sont pas produits et ont introduit ajustements à l'algorithme logiciel pour le traitement des données du capteur (à l'aide de correctifs logiciels);
- il y a eu plusieurs redémarrages d'ordinateur pendant le vol vers la lune;
- contrôler le code du programme, les commandes et travailler avec l'ordinateur de bord - en langage C;
- en raison du fait qu'il n'y a qu'un seul ordinateur, au redémarrage, toutes les mises à jour (correctifs) sont effacées et doivent être téléchargées à nouveau sur le système;
- faible vitesse de transfert de données: une photo haute résolution (à partir d'un appareil photo 8 Mpx) charge 40 minutes;
- Le DLR (German Aerospace Center) a testé le mécanisme d'atterrissage du vaisseau spatial Bereshit.
Équipe SpaceIL: La plupart d'entre eux sont des ingénieurs et physiciens aéronautiques. Mais il y a des membres plus jeunes qui ont été formés par l'unité d'opérations par satellite de Tsahal.
Systèmes matériels Bereshit, dont la défaillance pourrait entraîner une exécution anormale des étapes de la procédure d'atterrissage et une chute:
Le moteur de l'appareil Bereshit.Le moteur de l'appareil Bereshit est une unité de missile chimique spécialement adaptée (pour la mission Bereshit, elle a été modifiée en raccourcissant la buse et en augmentant la poussée) de la famille LEROS (pour une utilisation sur les plates-formes satellites) - Modification LEROS 2b sur l'hydrazine (monométhylhydrazine) avec une poussée de 45 kgf (441H), ce qui est légèrement plus que ses caractéristiques habituelles à 41,5 kgf (407H).

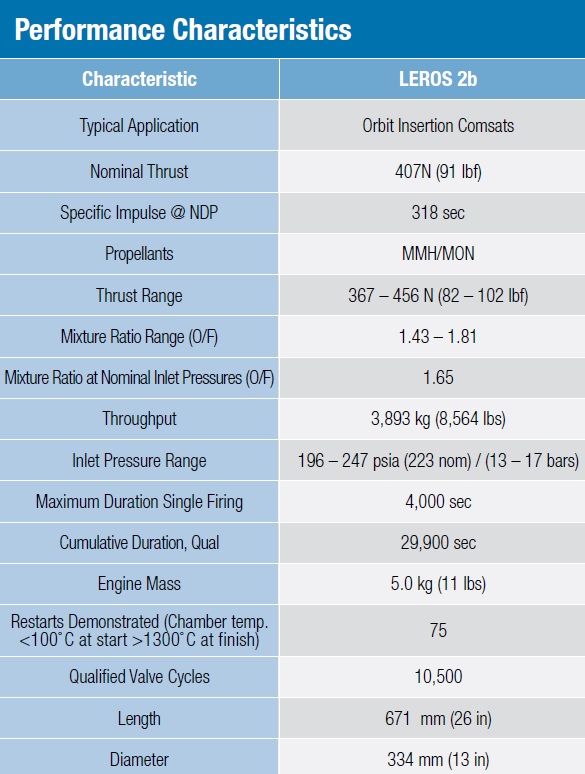
On suppose que ce moteur n'a pas été conçu pour plusieurs démarrages et qu'il n'est pas étranglé, bien que pendant la mission Bereshit il y ait eu plusieurs démarrages du moteur principal pendant plusieurs minutes et pendant l'atterrissage, des dizaines de minutes.
La poussée totale des moteurs de manœuvre est de 8 * 25H = 200H (la moitié de la principale). Autrement dit, lorsque le moteur principal est arrêté, la poussée diminue de trois fois, ce qui a été observé lors de l'atterrissage.
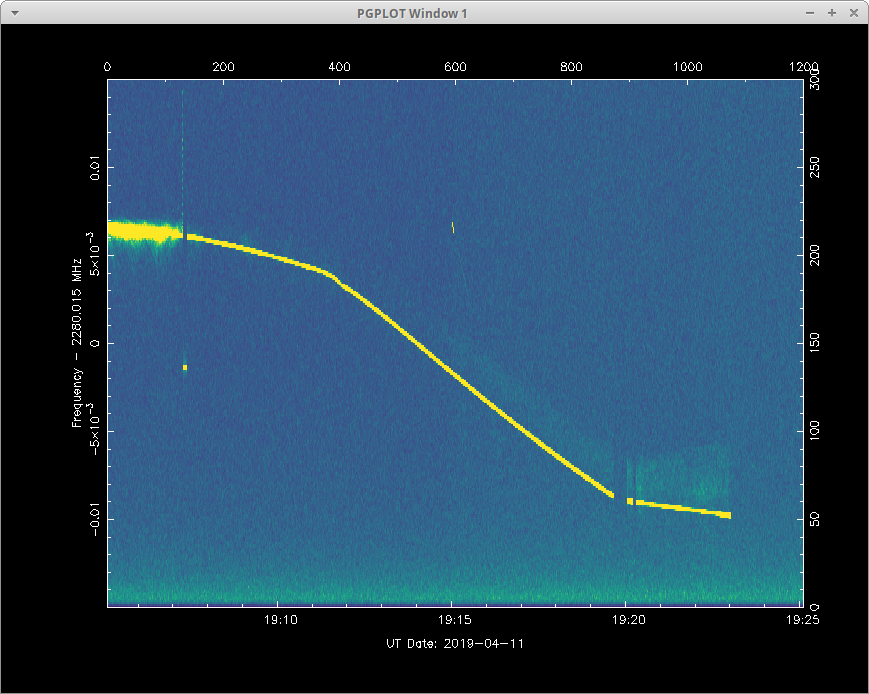
Des coupures de moteur lors de l'atterrissage ont également été enregistrées:
La courbe Doppler de l'atterrissage-chute de l'appareil Bereshit, vers 19h19 le freinage a presque cessé:
 Ordinateur de bord.
Ordinateur de bord. Processeur HiRel GR712RC de Cobham Gaisler
Processeur HiRel GR712RC de Cobham GaislerEn tant qu'élément principal de l'ordinateur de bord, le dispositif Bereshit utilise le
processeur Cobham
double cœur Gaisler HiRel GR712RC .
Technologiquement, la puce est basée sur LEON SPARC et est fabriquée en utilisant une technologie unique de silicium résistant aux radiations.
SpaceIL est devenu le
premier client de ce processeur et les ingénieurs de SpaceIL ont écrit un logiciel spécial pour celui-ci avant la livraison et l'échange sur l'appareil Bereshit.
GR712RC est un processeur dual-core LEON3FT SPARC V8 . Il peut fonctionner à des fréquences allant jusqu'à 125 MHz dans toute la gamme des fréquences militaires. Cela fournit jusqu'à 300 DMIPS et 250 MFLOPS performances de pointe. Intègre des protocoles d'interface avancés, notamment SpaceWire, CAN, SatCAN, UART, 1553B, Ethernet, SPI, I2C, GPIO et autres. Il dispose de bus d'interface haute vitesse pour la mémoire externe SDRAM / SRAM / PROM / EEROM / NOR-FLASH. Résistance aux radiations éprouvée - jusqu'à 300 degrés. Faible consommation d'énergie.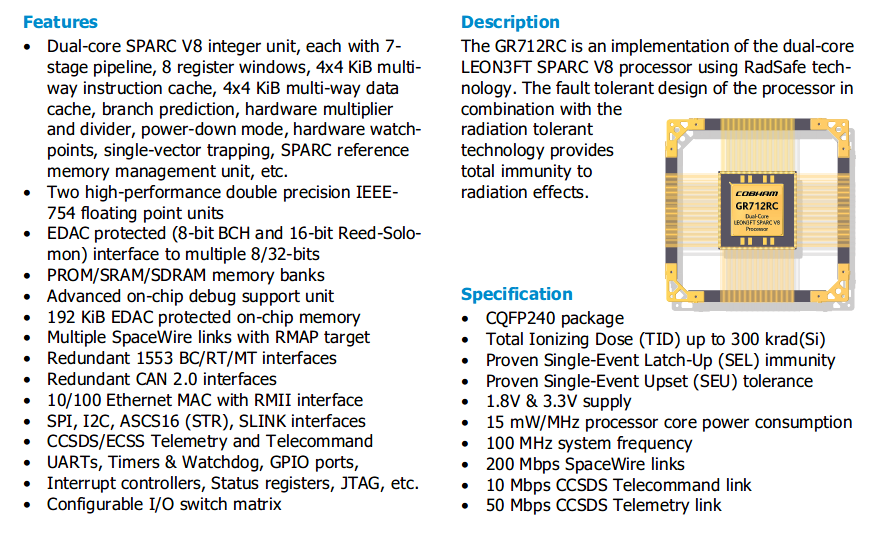

Selon des données mises à jour - ce processeur est fabriqué en utilisant la technologie commerciale la plus courante (TowerJazz 180 nm, fabriquée en Israël), à peu près la même que celle des contrôleurs pour bouilloires électriques. Assurer la joie sans interférer avec la technologie, en raison des circuits et de la topologie des éléments, ce qui coûte une commande ou deux moins cher que si le processus de fabrication était développé spécifiquement.
L'ordinateur de bord de l'appareil Bereshit avait déjà redémarré plusieurs fois avant d'atterrir en raison de l'influence de l'environnement spatial (rayonnement, température).
TT&C.Le système de sous-système de suivi, de télémétrie et de commande (TT&C - sous-système de suivi, de télémétrie et de commande) utilisé dans ce projet a «suspendu» deux (2!) Fois dans la phase finale d'atterrissage, bien que son statut soit «OK»
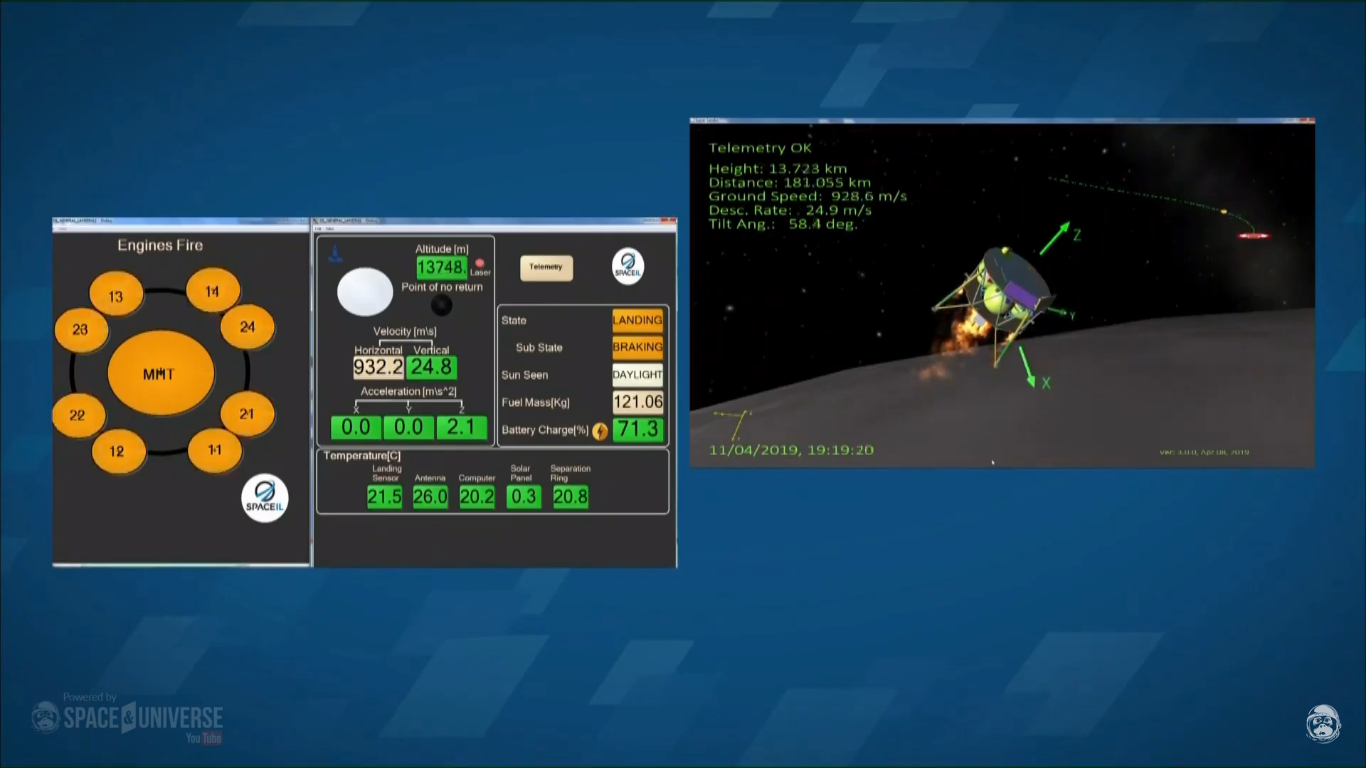
Capteurs et éléments système de l'appareil Bereshit dans la fenêtre de données de télémétrie:
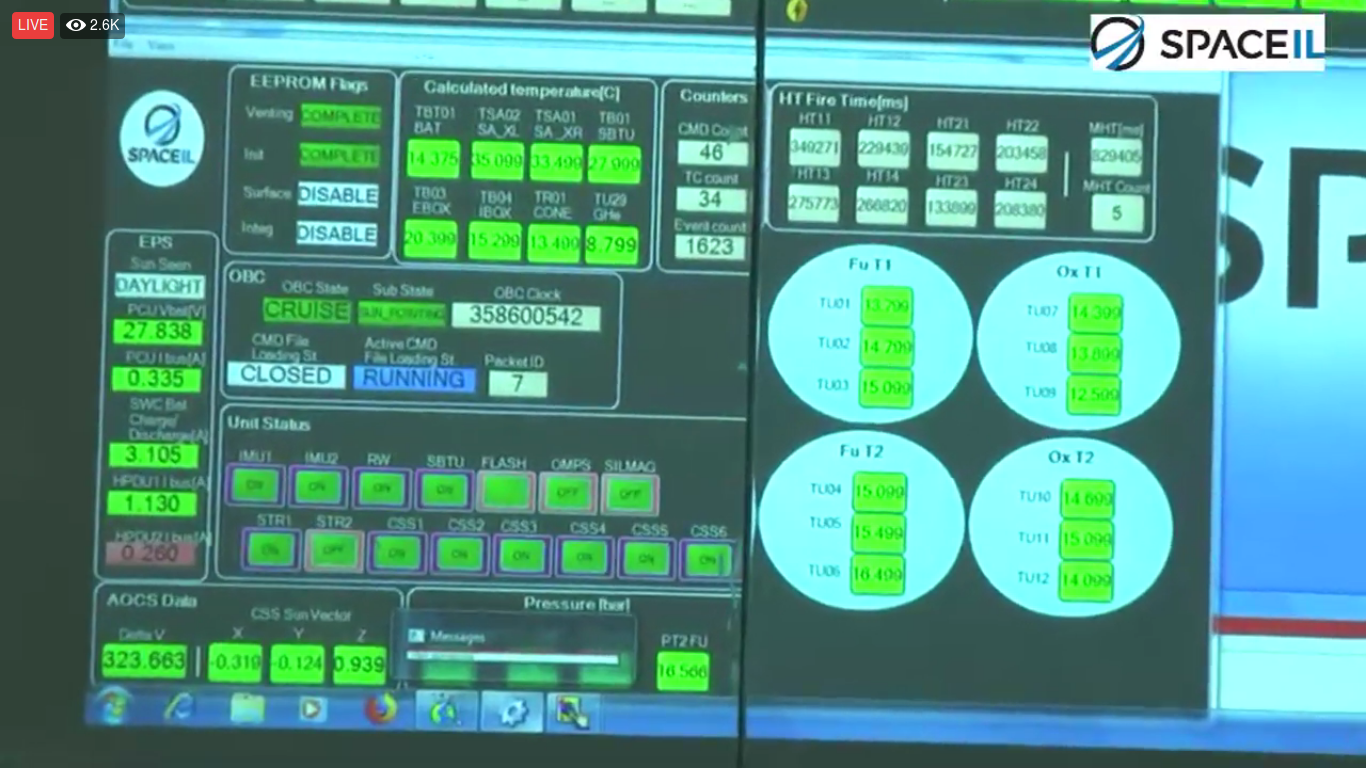
Comment le système de télémétrie s'est bloqué:


Voici ce que les ingénieurs du MCC ont vu lors de l'atterrissage, selon les données de télémétrie:
Mode d'atterrissage normal:
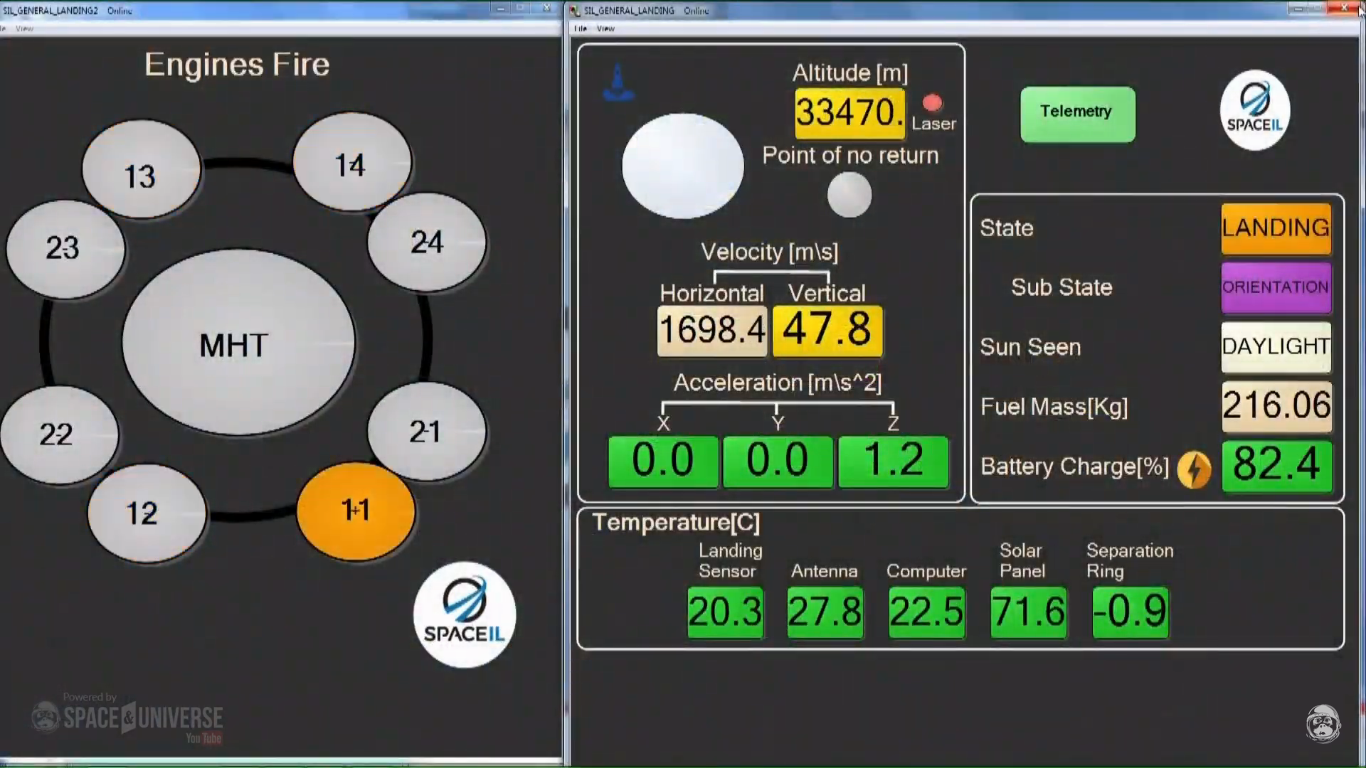

Et ici, des problèmes ont déjà commencé avec l'arrêt du moteur, le «gel» des données de télémétrie et des lectures de vitesse anormales, qui, à des hauteurs de conception, devraient être complètement différentes.






23:03 L'indicateur de télémétrie devient vert. Le sous-État est l'orientation.
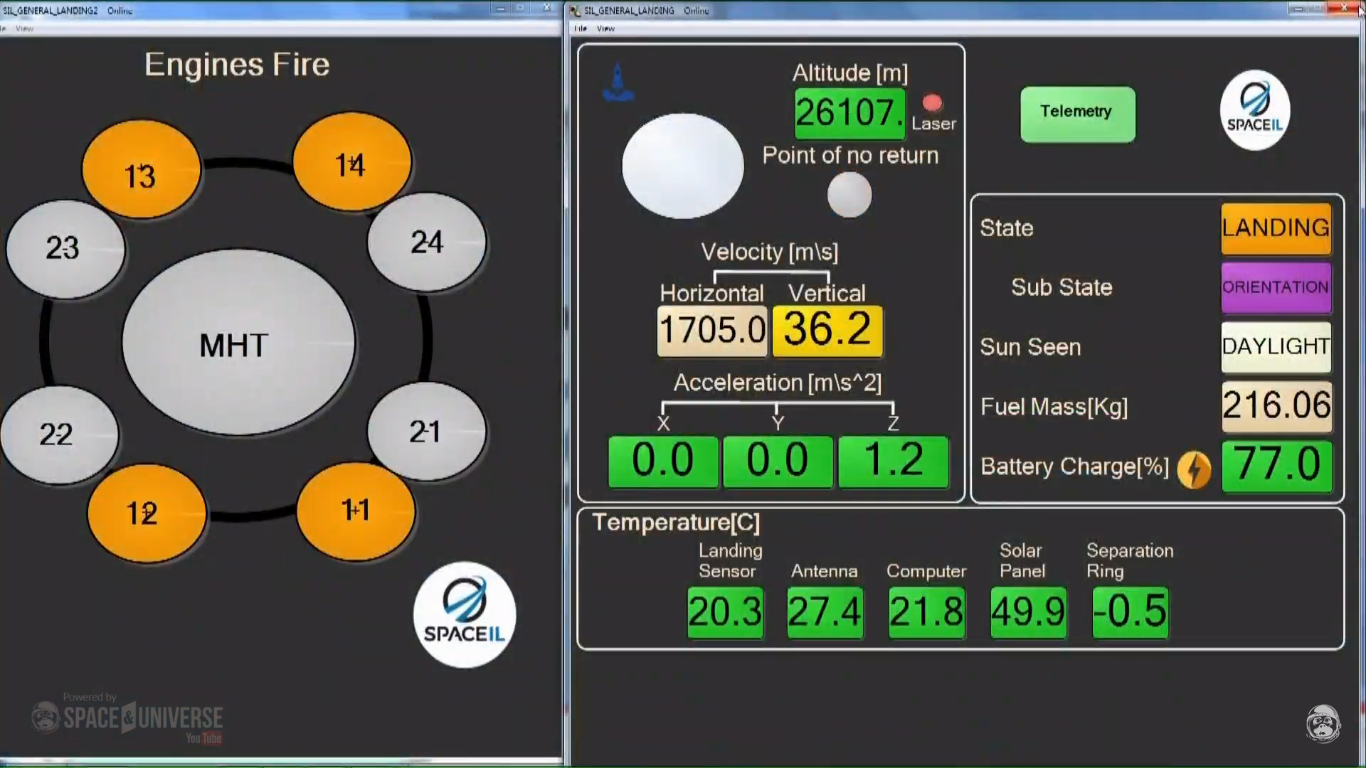
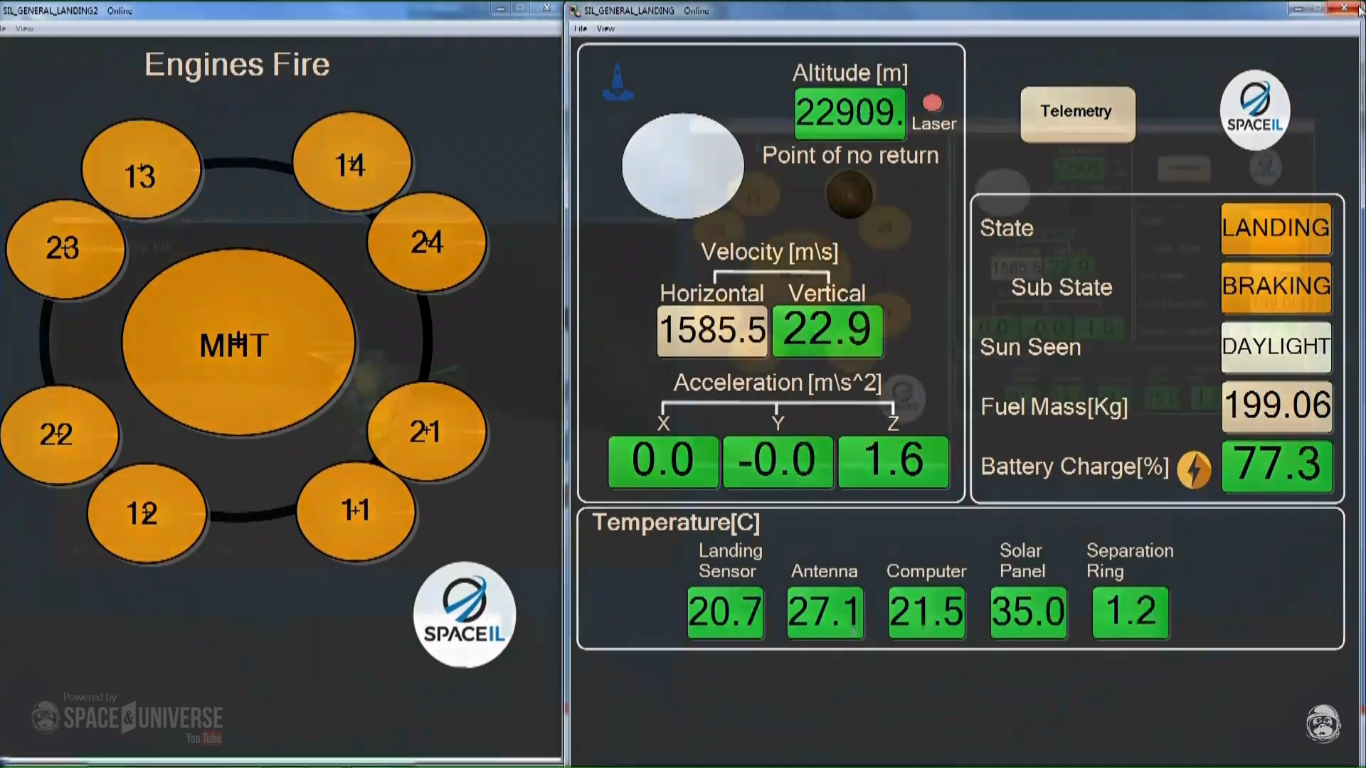
25:04 Le sous-état passe au freinage.
25:20 "Nous avons dépassé le point de non-retour."
25:26 L'indicateur Point of No Return devient noir.
25:52 L'affichage de la vitesse verticale devient vert.
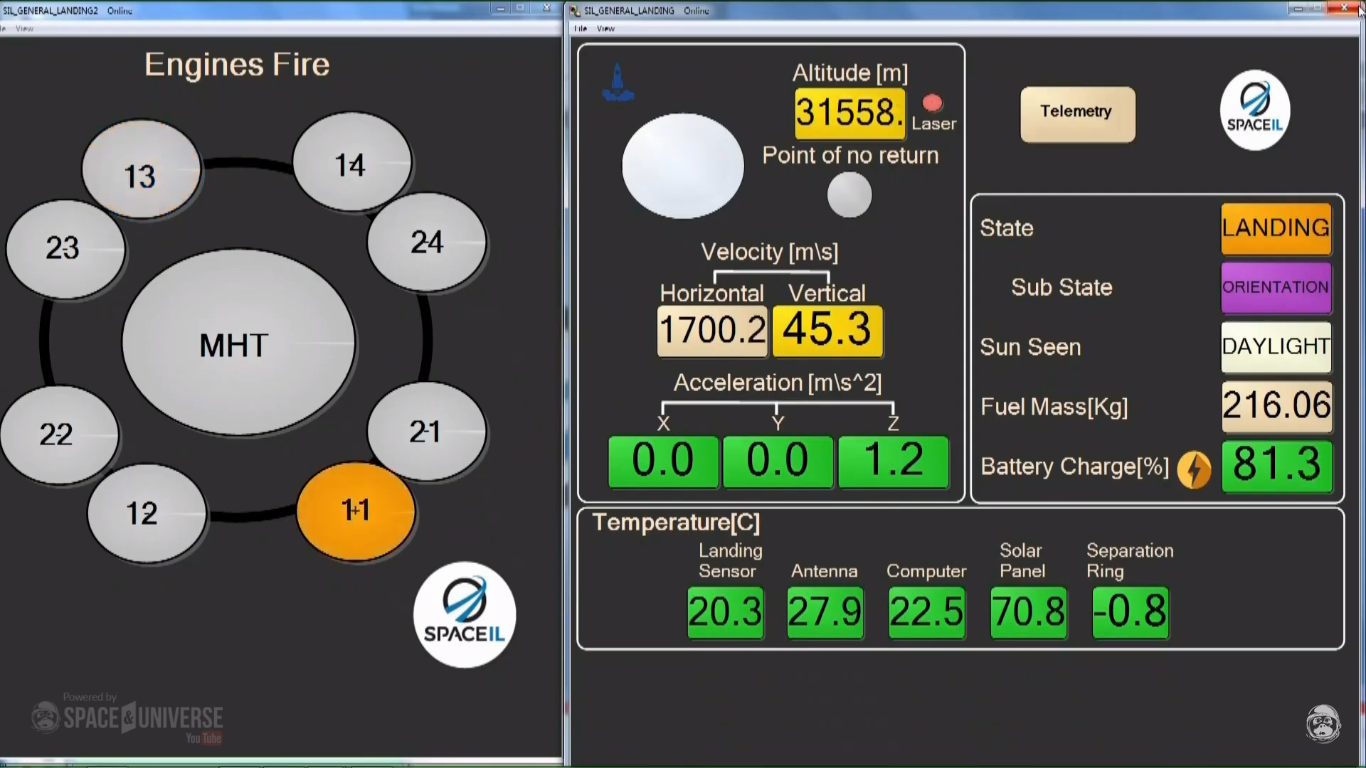
28:16 L'indicateur de télémétrie n'est plus vert.
28:20 L'indicateur de télémétrie devient momentanément vert, puis n'est plus vert.
29,37 La distance est indiquée comme 210 km.
29:50 La distance passe à 385 km.
30:03 La distance passe à 370 km.
30:40 L'indicateur de télémétrie est vert.
30:51 La distance est de 314 km.
31:33 Un selfie Beresheet est affiché. Altitude environ 22 km ??? La télémétrie est verte.
31:50 L'indicateur de télémétrie n'est plus vert.
31:55 à 32:29 "[inaudible] tuez-le." "[Plus de bavardage inaudible sur la mission] occupé."
32:48 L'écran de télémétrie s'affiche. L'indicateur de télémétrie est jaune clair. L'altitude est 14095 m. La vitesse horizontale est de 955,5 m / s. La vitesse verticale est de 24,8 m / s. Le moteur principal est en marche. La vitesse horizontale est jaune clair. Les autres paramètres sont verts, à l'exception de l'indicateur de télémétrie.
32:49 Tous les moteurs sont allumés.
32:51 Tous les moteurs sont éteints.
32:55 Le moteur principal est en marche.
32:57 Tous les moteurs sont allumés.
32:59 Le moteur principal est allumé. La distance est de 183,8 km.
33:01 - 33:03 "IMUstein ne va pas."
33:02 Tous les moteurs sont allumés.
33:05 Le moteur principal est en marche.
33:07 Tous les moteurs sont allumés.
33:09 Le moteur principal est en marche.
33:11 Tous les moteurs sont allumés.
33:13 Le moteur principal est en marche.
33:16 Tous les moteurs sont allumés.
33:20 L'indicateur de télémétrie devient vert. Tous les moteurs sont éteints. Tous les affichages restent statiques (aucun changement).
33:32 L'indicateur de télémétrie n'est plus vert. Tous les moteurs sont éteints. Tous les affichages restent statiques (aucun changement).
34:24 L'indicateur de télémétrie devient vert. Tous les moteurs sont éteints, mais soi-disant allumés. L'accélération verticale sur l'axe Z est fixée à 0,6. "Nous avons actuellement un problème dans l'une de nos centrales de mesure inertielle." La vitesse verticale commence à augmenter régulièrement. L'altitude continue de diminuer régulièrement. L'accélération verticale sur l'axe Z devient fixe à 0,6. Le moteur principal n'est probablement pas en marche.
L'indicateur de télémétrie devient vert par intermittence, puis devient jaune clair, jusqu'à l'horodatage vidéo suivant.
34:56 L'indicateur de télémétrie n'est plus vert. Bien que tous les moteurs soient affichés comme allumés, la vitesse verticale continue d'augmenter. L'accélération verticale sur l'axe Z reste fixe à 0,6. Le moteur principal n'est probablement pas en marche.
36:25 - 36:33 «Nous semblons avoir un problème avec notre moteur principal. Nous réinitialisons le vaisseau spatial pour essayer d'activer le moteur. "
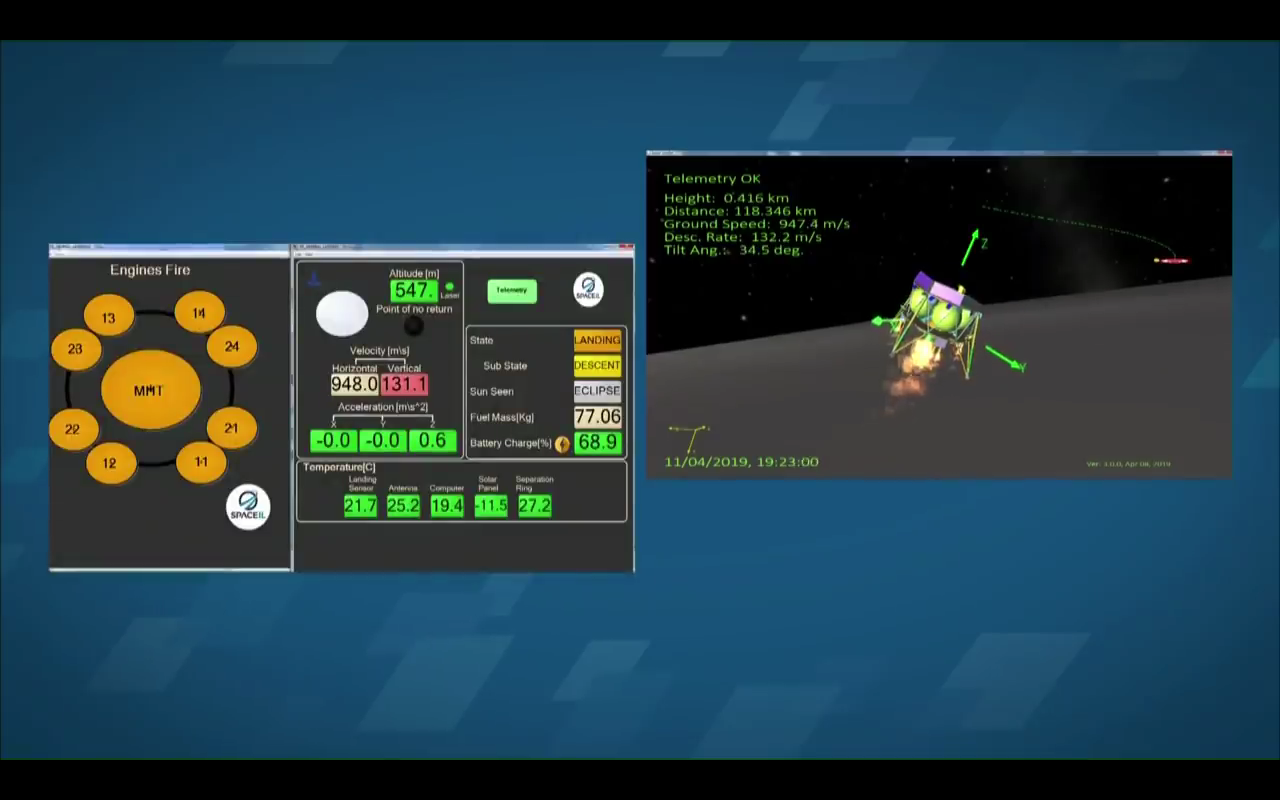
36:40 L'indicateur de télémétrie est vert. Tous les moteurs semblent être allumés, mais l'accélération sur l'axe Z reste fixe à 0,6 m / s. L'altitude est de 678 mètres. Les vitesses horizontale et verticale sont respectivement de 948,1 m / s et 130,1 m / s.
36:44 Dernières données de télémétrie. L'indicateur de télémétrie est vert. Tous les moteurs semblent être allumés. L'accélération de l'axe Z passe à 0,7 m / s. L'altitude finale est de 149 mètres. Les vitesses horizontales et verticales finales sont respectivement de 946,7 et 134,3 m / s. Le moteur principal ne semble pas fonctionner correctement.
Les 4 dernières secondes de la vie de l'appareil selon les données du MCC (de 678 à 149 mètres de diminution):
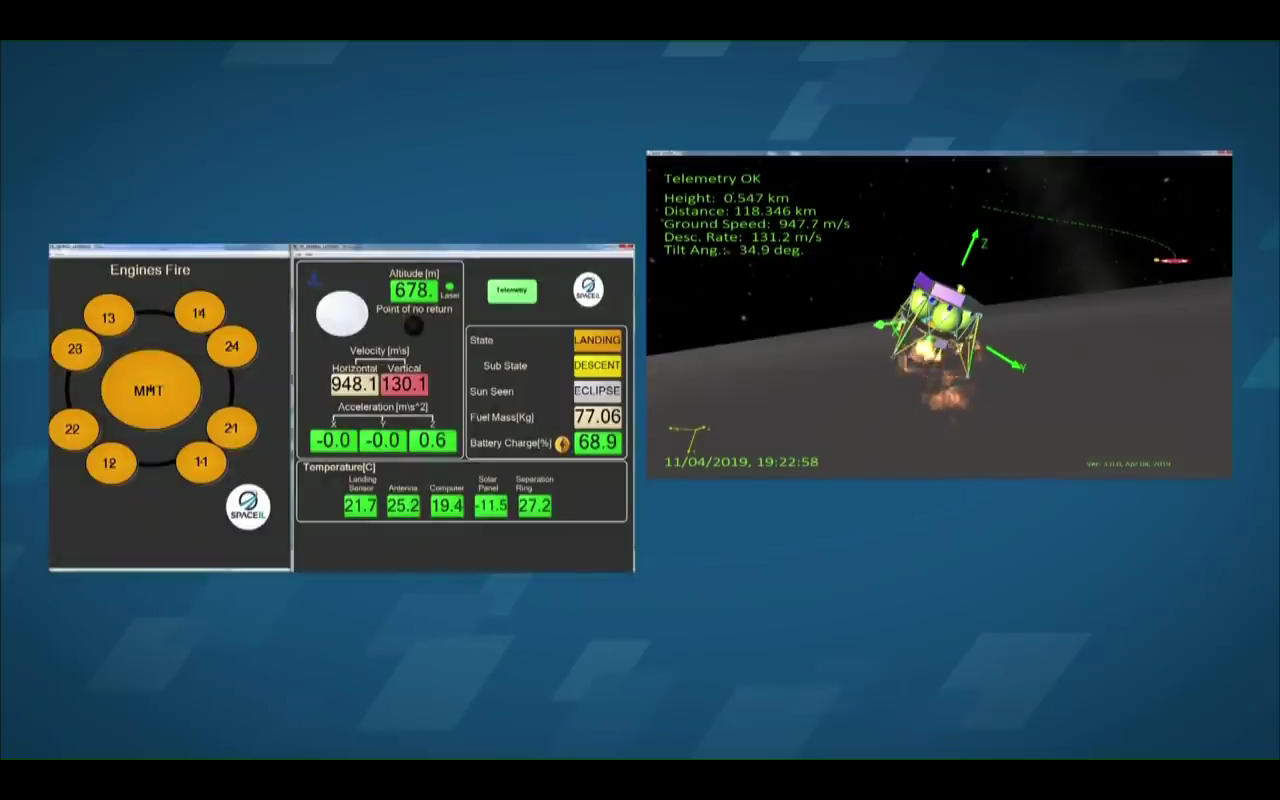
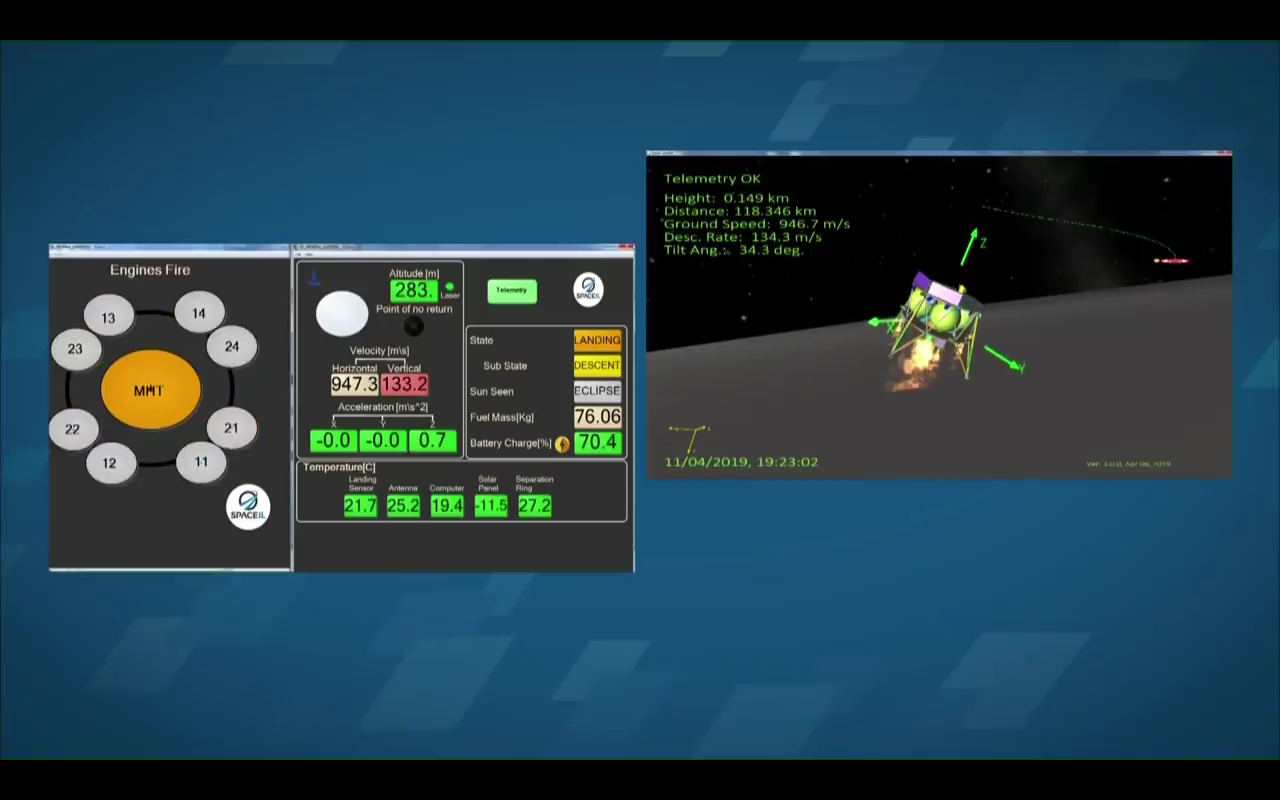

À 19 h 23, les données de télémétrie ont complètement cessé d'arriver.
Auparavant - les problèmes ont commencé à une altitude de 14 km, le moteur principal s'est arrêté pendant le processus d'atterrissage, et après son redémarrage, il était trop tard - l'appareil ne pouvait pas freiner correctement, ce dysfonctionnement a entraîné une chute brutale à grande vitesse et d'une hauteur de 150 mètres jusqu'à la lune.
Unité d'orientation inertielle (unité de mesure inertielle - IMU1, IMU2) - les nœuds sont dupliqués.Mais c'est intéressant, car ici deux blocs ont été utilisés et leurs données étaient très importantes pour l'ordinateur de bord.
Déjà plus tôt, en raison des défaillances de ces modules, il y avait eu des accidents - comme avec l'appareil Schiaparelli sur Mars en 2016.
Il s'est avéré qu'une erreur fatale dans le fonctionnement du logiciel Skiaparelli s'est produite en raison de problèmes dans le fonctionnement du "compteur d'inertie" (IMU), un appareil qui mesure la vitesse de rotation du module autour de son axe.
Les données de cet appareil , comme l'expliquent les ingénieurs, ont été prises en compte lors du traitement des données d'altitude des radars Schiaparelli. À un moment donné, l'IMU s'est écrasé, ce qui a permis de «mesurer» une vitesse de rotation anormalement élevée du rendu, qui dépassait les valeurs autorisées. De telles défaillances sont la norme dans le fonctionnement des capteurs inertiels, et généralement pour les supprimer, les scientifiques «lissent» le signal et comparent les données du moment actuel avec les résultats obtenus par le passé.
Mais dans ce cas, l'IMU a transféré des données vers l'ordinateur hôte Schiaparelli pendant une durée inattendue, pendant une seconde, ce qui a "trompé" le logiciel du module et l'a forcé à considérer ces mesures comme des données réelles, et non comme une anomalie. Des valeurs incorrectes ont été prises en compte lors du calcul de la hauteur du module, à la suite de quoi l'ordinateur de bord Skiaparelli a reçu des valeurs de hauteur négatives.
Le module a estimé qu'il n'était même pas à la surface de Mars, mais en dessous, ce qui l'a forcé à entamer la dernière étape de la procédure d'atterrissage à une altitude de 3,7 km, pour séparer les parachutes et éteindre les moteurs.L'appareil Bereshit utilisait le module IMU suivant:
STIM300 .
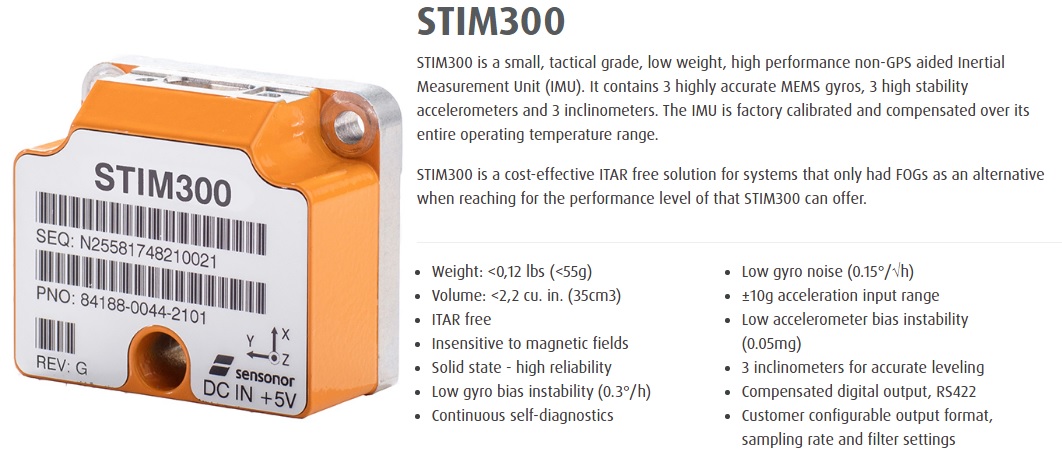
Ce module a des caractéristiques de radioprotection de bas niveau, de sorte que l'utilisation de tels dispositifs sur la Lune sera probablement approfondie par les ingénieurs de SpaceIL plus tard dans de nouvelles missions.
Puisqu'il y a eu une déclaration de SpaceIL après l'accident:
«Problème dans l'une des unités de mesure inertielle de Beresheet. Les contrôleurs au sol ont perdu la télémétrie pendant quelques instants mais ont repris la télémétrie. »Est-il vrai que le module Bereshit IMU (ou les deux modules) a donné des données incorrectes (y compris la mesure des accélérations angulaires et linéaires devenues impossibles) pour l'ordinateur de bord et pour quelle raison - cela est toujours sous enquête par les ingénieurs de SpaceIL
Cependant, pour l'instant, il est clair que le vaisseau spatial Bereshit a connu un dysfonctionnement technique dans l'un des composants, ce qui a conduit à l'arrêt des moteurs, ce qui a empêché le vaisseau spatial de réduire la vitesse de descente vers la surface lunaire.
Lorsque les moteurs ont été redémarrés, ils ne pouvaient plus effectuer un freinage complet, il s'est avéré que la vitesse du véhicule était trop élevée, et l'altitude à la surface de la lune a été considérablement réduite, et une collision destructrice s'est produite.

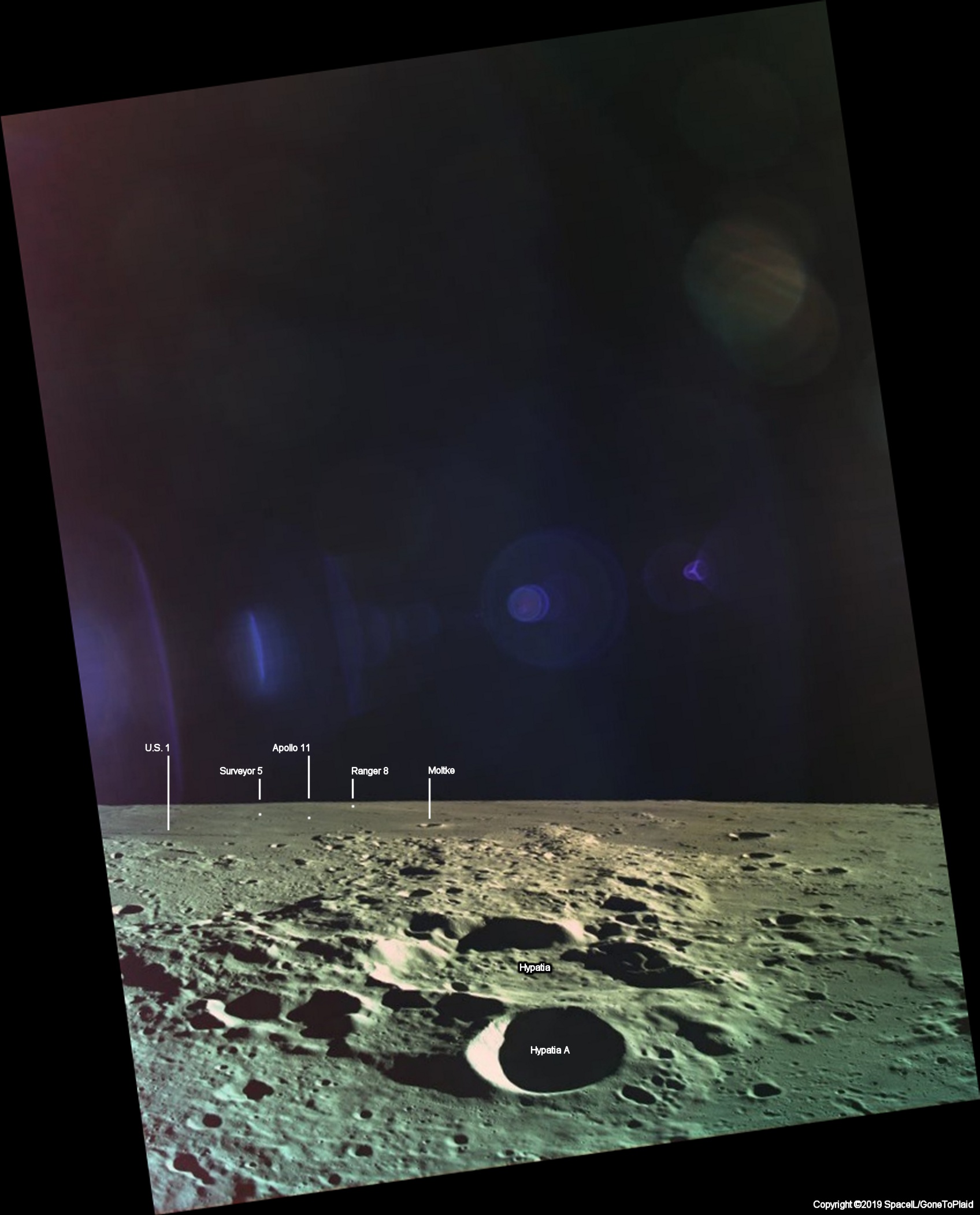
La dernière photo de l'appareil photo Bereshit est également un peu déroutante. Puisqu'il montre la surface lunaire à 1000 km de la zone d'atterrissage prévue dans la mer de clarté.
Le dernier cadre (officiellement publié) de l'appareil Bereshit (d'une hauteur de 8 km):
Ainsi, il sera très difficile de trouver au moins quelque chose à partir de l'appareil Bereshit, car la zone de recherche est très étendue:
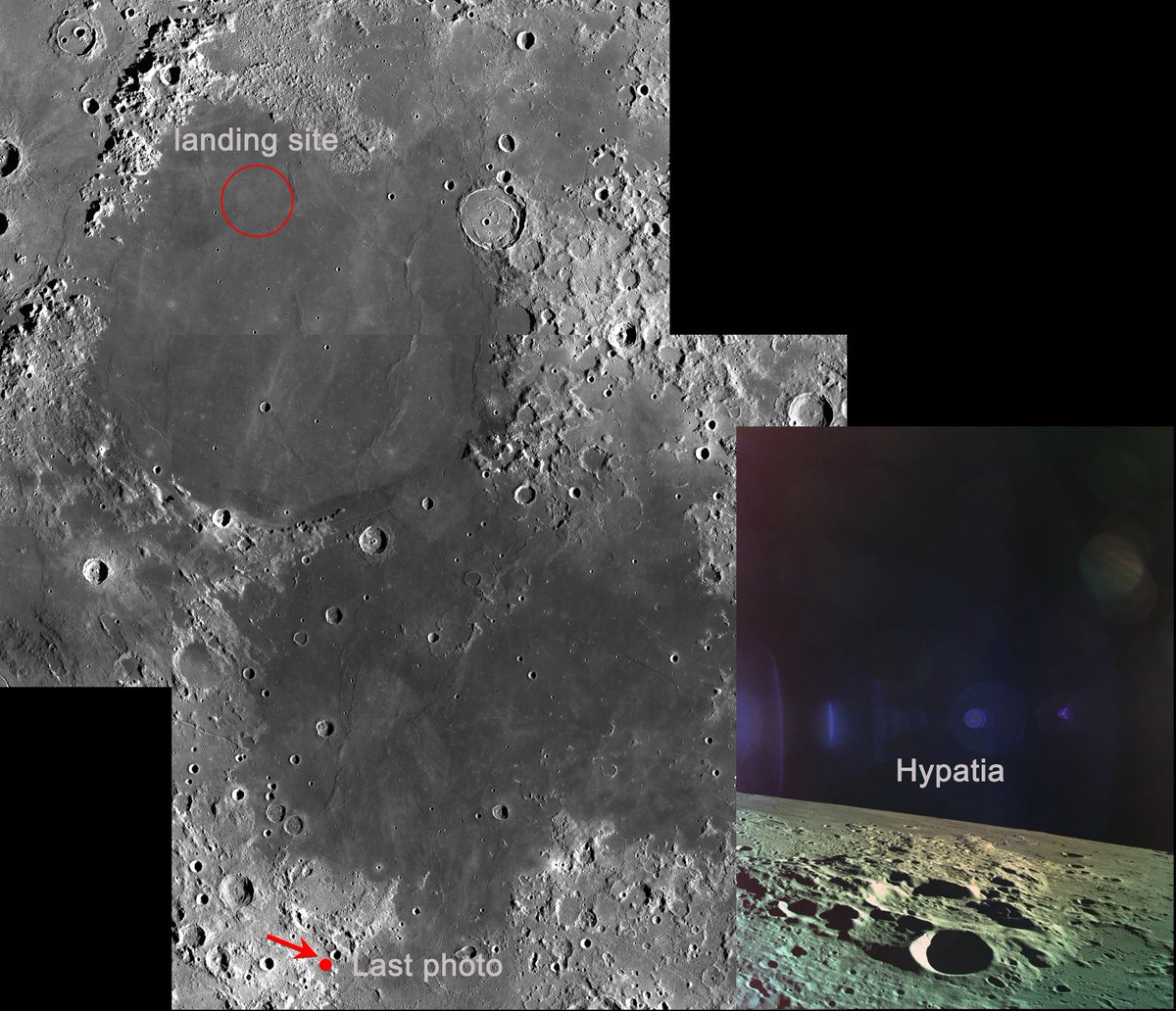
Bien qu'il soit un peu clair où chercher (à 200 km de la zone d'atterrissage d'Apollo 11):

La NASA prévoit d'utiliser la sonde LRO pour examiner la zone d'impact de l'appareil Bereshit, dans l'espoir que les éléments du réseau de réflecteurs d'angle laser ne se sont pas effondrés et seront situés à la surface de la lune.
Des réflecteurs étaient fixés sur la partie supérieure de l'appareil et, lors de sa chute, pouvaient rebondir, se disperser, se retourner et s'enfouir dans le sol lunaire.
Mais même si seule une partie du réflecteur est disponible pour réfléchir l'impulsion lumineuse - cela sera corrigé par LRO.Un altimètre laser LRO (sonde orbitale lunaire de la NASA), conçu pour compiler des cartes d'altitude, enverra des impulsions de lumière laser au réflecteur d'angle au point d'impact de l'appareil Bereshit, puis mesurera combien de temps il faut pour que la lumière revienne.
En utilisant cette technique, les ingénieurs de la NASA et de SpaceIL prévoient de pouvoir localiser les restes du dispositif Bereshit.
 Bien que cela soit aussi intéressant ici, il y a encore des photos de la chute dans SpaceIL, mais ils ne les publient pas:- Est-ce vraiment la dernière photo reçue de Beresheet? Quand a-t-elle été prise exactement? Je demande parce que le cratère Hypatia est beaucoup plus au sud que le site d'atterrissage prévu.
Bien que cela soit aussi intéressant ici, il y a encore des photos de la chute dans SpaceIL, mais ils ne les publient pas:- Est-ce vraiment la dernière photo reçue de Beresheet? Quand a-t-elle été prise exactement? Je demande parce que le cratère Hypatia est beaucoup plus au sud que le site d'atterrissage prévu.
- Non ce n'est pas la dernière photo qui a été prise. Nous avons une photo qui a été prise plus près de l'atterrissage mais dont la publication n'a pas encore été confirmée . Je suppose qu'il sera bientôt publié.Que se passera-t-il ensuite avec la mission Bereshit?Le développement d'un nouveau projet spatial, Bereshit 2.0, a été annoncé . Le Premier ministre israélien Benjamin Netanyahu a promis que l'État participerait à une deuxième tentative d'envoyer une station automatique sur la Lune.«Nous allons lancer Bereshit-2. L'État d'Israël a participé au lancement du premier vaisseau spatial et participera au lancement du second. J'espère que cette fois tout réussira. Dans ce cas, nous deviendrons vraiment le quatrième pays au monde à atterrir sur la lune », a déclaré Netanyahu lors d'une réunion du gouvernement.Il est prévu que le projet Bereshit 2.0 sera plus sérieux et plus cher (par rapport au premier), mais il restera privé.
Le Premier ministre israélien Benjamin Netanyahu a promis que l'État participerait à une deuxième tentative d'envoyer une station automatique sur la Lune.«Nous allons lancer Bereshit-2. L'État d'Israël a participé au lancement du premier vaisseau spatial et participera au lancement du second. J'espère que cette fois tout réussira. Dans ce cas, nous deviendrons vraiment le quatrième pays au monde à atterrir sur la lune », a déclaré Netanyahu lors d'une réunion du gouvernement.Il est prévu que le projet Bereshit 2.0 sera plus sérieux et plus cher (par rapport au premier), mais il restera privé. SpaceIL reprendra également la direction principale du nouveau projet Bereshit 2.0 et restera également une organisation à but non lucratif.Durée prévue du projet «Bereshit 2.0»: 2-3 ans.C'est merveilleux quand le pays, les ingénieurs et les gens ne cessent de croire à la victoire.
SpaceIL reprendra également la direction principale du nouveau projet Bereshit 2.0 et restera également une organisation à but non lucratif.Durée prévue du projet «Bereshit 2.0»: 2-3 ans.C'est merveilleux quand le pays, les ingénieurs et les gens ne cessent de croire à la victoire. No dream is beyond your reach, if you truly want it!
No dream is beyond your reach, if you truly want it!:
Lego model of Beresheet