Bonjour cher habratchitel!Pas même quatre ans ne se sont écoulés depuis que le premier modèle de travail de notre
GPS sous-marin a vu le jour, depuis lors, nous avons
mangé une livre de sel et fabriqué un tas de divers systèmes et appareils, mais par la volonté du destin, un test important a toujours contourné notre premier-né. Dans cet article, je vais vous expliquer comment cela s'est passé.
Tous ceux qui sont préoccupés par le sujet des robots sous-marins, leur contrôle et leur navigation - bienvenue au chat sur notre kayak gelé dans les eaux d'avril du réservoir de Volgograd!

(Akhtung! Il y a beaucoup de photos sous la coupe!)
"... le véritable endroit du navire, bien qu'il soit connu, mais ce n'est pas accidentel,
c'est le cas, mais on ne sait pas à quel moment. "
Aleksishin V.G. et autres Navigation pratique, 2006. p. 71.
De quoi s'agit-il?
Pour ceux qui n'ont absolument pas le temps de lire, je décrirai brièvement le problème:
Le GPS n'accroche pas sous l'eau, et la communication radio ne fonctionne pas, presque toute la navigation se fait en utilisant l'acoustique, et la communication se fait en utilisant l'acoustique, le câble, et très souvent en eau claire, en utilisant la
lumière .
Pour les nouveaux arrivants, je fournirai traditionnellement des liens vers nos publications précédentes sur le hub, où nous racontons tout sur les communications et la navigation sous-marines: de l'histoire de la création de notre GPS sous-marin et de la transmission du son "vidéo" à travers l'eau et aux instructions sur la façon de fabriquer une simple antenne hydroacoustique à partir des ordures:
-
GPS sous -
marin à partir de zéro par an-
Nous avons fabriqué le plus petit modem sonar au monde-
Sur l'effet des cyanobactéries sur les fonctions vocales du président-
Fabriquer une simple antenne sonar à la poubelle-
Séance de transmission sonore vidéo à travers l'eau avec exposition-
"GPS" sous -
marin sur deux émetteurs-récepteurs-
Navigation sous l'eau: Roulement sans roulement - vous êtes voué au succès-
GPS sous -
marin: suiteLes drones volant et roulant, rampant au sol et flottant à la surface transmettent des vidéos de leurs caméras en temps réel, et parfois des coordonnées GPS, et l'opérateur sait toujours où se trouve son appareil, de plus, souvent l'opérateur peut le voir.
Avec les véhicules sous-marins (TNPA ou ROV), tout est quelque peu différent. Laisser l'appareil aller dans les eaux sombres, vous pouvez être sûr d'une seule chose - il est définitivement sous l'eau.
Un peu plus profondément dans le problème
Les appareils sont répartis en différentes classes, divisés par taille et tâche. Les plus simples et les plus petites (comme la nôtre), celles d'inspection ne sont qu'une caméra vidéo sur un câble avec des moteurs. Les plus complexes et les plus grands peuvent être équipés de manipulateurs et d'autres adaptations intéressantes,
certains spécimens de la taille d'
une gazelle sont livrés avec un navire spécialisé, des
pirates et une équipe d'embarquement et ont une capacité totale de plus de 200 ch. Les longueurs de câble peuvent aller de quelques dizaines à plusieurs centaines de mètres dans les petits appareils et atteindre des milliers de mètres dans les grands appareils de grande taille.
TNLA est nominalement contrôlé par un retour visuel - en regardant l'image transmise par les caméras de la caméra via un câble, parfois elles sont équipées de sonar, car parfois l'eau est
toujours trouble.
Cette approche a exactement un inconvénient: en voyant sur le moniteur une image d'un élément de paysage d'intérêt, il est absolument impossible de dire exactement où il se trouve.
Navigation sous-marine
Ils luttent contre cet inconvénient en utilisant des systèmes de positionnement acoustique. En règle générale, ils placent un pinger (émettant périodiquement un signal spécial) ou une balise à transpondeur sur l'appareil. Le signal du doigt est détecté, la distance est déterminée, puis, par l'angle (ou deux angles - horizontal et vertical) de l'arrivée du signal et la distance, l'emplacement de l'appareil est déterminé. Ces systèmes sont appelés UKB (abréviation de Ultrashort-Base). Ils concernent le télémètre goniométrique et présentent toute une liste d'inconvénients, notamment en ce qui concerne cette tâche. Les plus simples étrangers
coûtent à partir de
17 000 euros , les nôtres sont
également là , pas pire et plus abordables, mais toujours pas gratuitement.
Pour déterminer les angles horizontaux (et dans les anciens systèmes et verticaux, dans le nouveau pinger transmet sa profondeur) des angles d'arrivée du signal du répondant ou du pinger, une antenne radiogoniométrique est nécessaire. L'appareil lui-même n'est pas simple et nécessite une installation sur une tige, qui doit être montée sur un navire. Par la plage, la profondeur et l'angle horizontal (ou par la plage et deux angles), seule la position relative de l'appareil est déterminée. Dans ce cas, la précision diminue avec l'augmentation de la distance.
La précision de la détermination de l'angle dépend:
- caractéristiques de l’antenne elle-même et se situe généralement à environ 0,5-3 °, et dans les systèmes les plus avancés, elle atteint 0,03 °, mais cela vaut le plaisir d’argent démoniaque. Permettez-moi de vous rappeler que 1 ° à une distance de 1000 mètres donne un écart de 17 mètres (soit ± 17 mètres).
- sur la façon dont la position de l'antenne elle-même est déterminée (roulis et trim);
- des conditions hydrologiques spécifiques. Par exemple, il est possible de détecter non pas un signal direct, mais une certaine réflexion ou leur somme, déterminant ainsi l'angle d'arrivée du signal réfléchi. Et il pouvait réfléchir à tout - y compris dans une direction complètement différente.
Une fois la distance et l'angle d'arrivée du signal déterminés, vous devez lier tout cela à la géographie. Autrement dit, vous devez connaître la position géographique de l'antenne radiogoniométrique et la direction de son zéro par rapport à la direction au nord. Ensuite, vous pouvez résoudre le
problème géodésique direct et déterminer la position du véhicule sous-marin en coordonnées géographiques. Autrement dit, vous devez toujours avoir une boussole et un GPS sur l'antenne.
En général, je suis convaincu que l'UHF ne devrait être appliqué que là où il est complètement impossible d'utiliser des systèmes à base longue.
J'insiste - absolument. Par exemple, lorsqu'un objet remorqué est positionné et que vous devez parcourir une très longue distance. Dans ce cas, il sera nécessaire de déplacer très souvent les éléments d'une longue base et cela entraînera un coût trop long en temps et en efforts, ou, un autre exemple, il sera impossible d'installer des bouées d'une longue base en surface en raison de la grande profondeur - très longues cordes et, en général, le schéma d'ancrage très compliqué. Dans tous les autres cas, je vous conjure: utilisez une base longue - c'est plus facile, plus fiable et plus précis.
UKB est bon et indispensable où vous avez besoin de trouver quelque chose, s'approchant progressivement et augmentant la précision. Il peut sembler que je suis contre UHF et pour DB, mais j'appelle simplement à l'utilisation de l'équipement en fonction de sa destination. En fin de compte, nous avons également fait le KGB, et à la lumière de cela, il est difficile de m'accuser de parti pris.
Systèmes à longue portée (DB) - c'est lorsqu'il y a plusieurs récepteurs ou émetteurs éloignés (par exemple, le GPS est un système à longue portée). Ils conservent leur précision à l'intérieur de la base, ils sont beaucoup moins sensibles au tangage et fournissent généralement de bien meilleurs résultats, car ils concernent les systèmes télémètres ou télémètres différentiels.
Pendant longtemps, je n'ai pas pu répondre à la question - pourquoi tout le monde essaie de marteler les ongles avec une pelle? Mais au fil du temps, mes collègues et moi sommes arrivés à une conclusion décevante: premièrement, les gens pensent très simplement - une antenne et un pinger sont plus faciles que plusieurs éléments d'une longue base qui sont éloignés l'un de l'autre. Deuxièmement, jusqu'à récemment, les systèmes DB n'étaient représentés que par les base inférieure, dont l'installation nécessite du temps et de l'argent très sérieux.
Nous sommes depuis longtemps en croisade contre l'
analphabétisme des utilisateurs de l' ordre des choses établi. Ce qui a commencé lorsque nous avons créé le tout premier exemple de notre GPS sous-marin, qui est un système à base longue avec une surface plutôt qu'une base inférieure.
GPS sous l'eau
Revenons au héros du test d'aujourd'hui. Le système de navigation est représenté par la base de navigation elle-même, formée de quatre
bouées flottantes
-répéteurs du signal GNSS:

Des bouées avant de commencer les travaux sont installées sur un étang à l'aide d'ancres en
pierre et de corde. Il suffit de libérer la bouée au mouillage, avant cela en cliquant sur l'interrupteur. C'est vraiment tout ce qui doit être fait.
Un autre élément du système est un récepteur de navigation situé sur un objet sous-marin:

Le
récepteur de navigation
RedNODE (petit cylindre jaune) est monté à l'arrière de l'unité. Il est alimenté par le réseau embarqué du robot et transmet les données via le câble de l'appareil.
Étant donné que les bouées émettent uniquement et que les récepteurs acceptent uniquement (fonctionnent selon le schéma de portée différentielle) et que personne ne dérange personne, alors sur un ensemble de bouées dans une zone d'eau, un certain nombre de ces récepteurs peuvent fonctionner. Autrement dit, théoriquement, toute une flotte de véhicules sous-marins et de plongeurs en toutes quantités et proportions peut théoriquement naviguer.

En raison de la précipitation, nous avons plutôt épinglé le récepteur de navigation avec désinvolture et ajouté une certaine flottabilité en matériau isolant thermique dense.
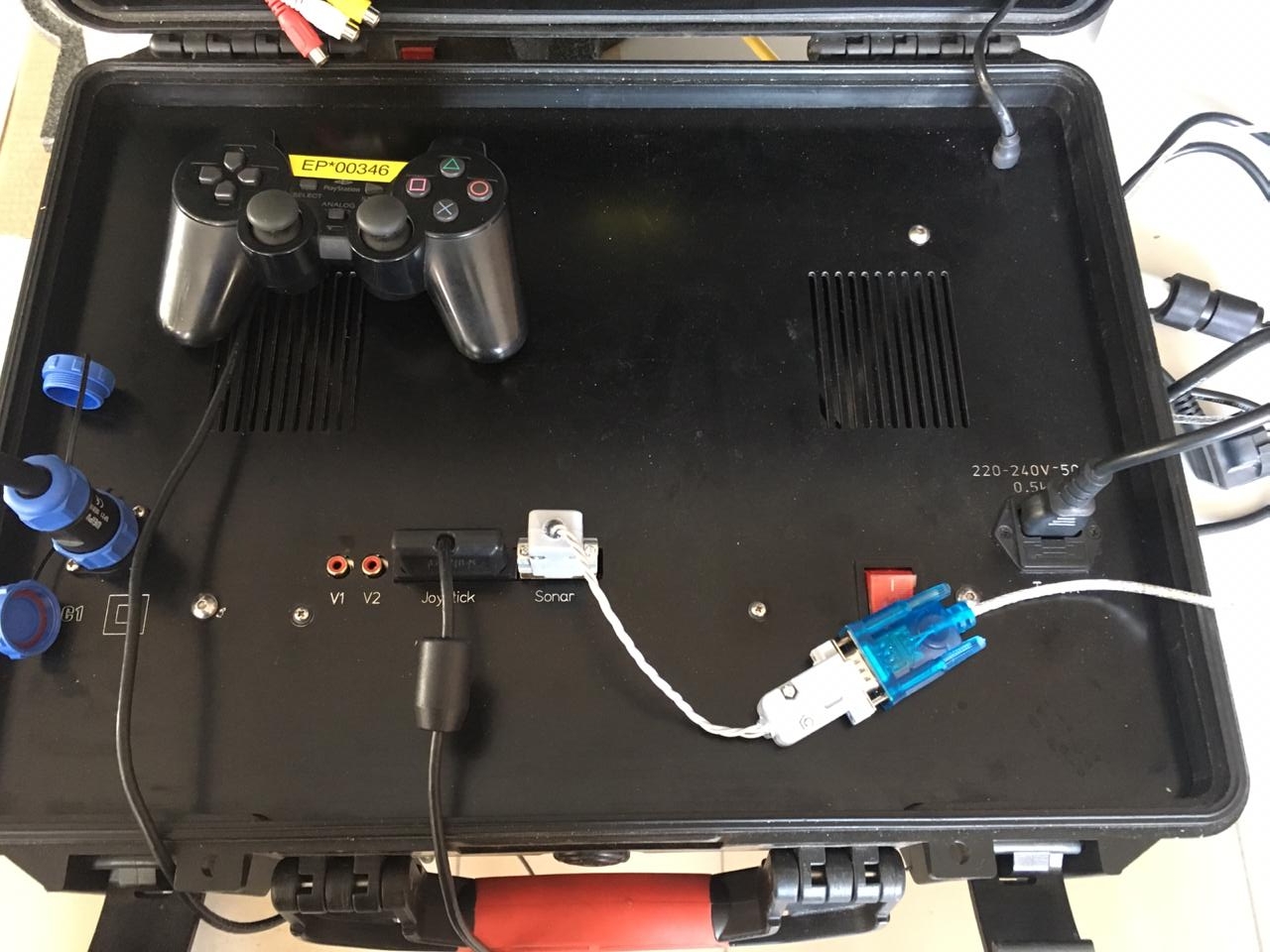
Les données du récepteur entrent dans le boîtier de commande et sont entrées dans n'importe quel ordinateur portable via le convertisseur RS232 <-> USB (connecteur «Sonar» sur la photo).
Les coordonnées dans ce système sont générées au niveau du récepteur (c'est-à-dire, strictement sur le plan terminologique, le système est un système de navigation et non un système de positionnement). Mais comme les TNLA fonctionnent sur un câble, en principe, il ne devrait pas y avoir de problème pour transférer vers le haut l'emplacement calculé sur l'appareil vers le câble. Soit dit en passant, le récepteur de navigation émule un récepteur GNSS ordinaire et peut être directement connecté en tant que récepteur GPS de surface le plus ordinaire, par exemple, à l'application
SAS.Planet , ce que nous faisons.
Le positionnement des robots sous-marins a été l'idée principale qui nous a capturés en 2015, lorsque nous avons commencé à développer notre GPS sous-marin. L'ironie du sort est que c'est cette application qui n'a pas été réclamée jusqu'en 2018 - le système était principalement utilisé dans les performances de plongée.
Cela est dû en partie au fait que les fabricants de TNLA sont très réticents à modifier leurs appareils, en partie au fait que les utilisateurs ont un très fort préjugé selon lequel la mise en place des bouées est difficile et prend du temps.
Maintenant, l'appareil de la classe d'examen est fait par tout le monde, littéralement, nous avons déjà perdu le compte. Voici une liste loin d'être complète des fabricants pour plus de clarté:
- L'ensemble du
TOP-10 2019- Et un autre
TOP-12 2019-
Et même un autre TOP , cette fois des appareils à petit budget
- Notre
ROVBUILDER- Le
célèbre OpenROV-
Appareil canadien
-
GNOM domestique
- Quelque chose qui rappelle
étrangement Blueye- Un autre
appareilIl y a une douzaine ou deux équipes universitaires différentes, et si vous regardez, il y a encore un tas de projets similaires, étant donné que nous n'avons même pas touché les plus gros appareils de la classe ouvrière et les appareils autonomes (les soi-disant AUV ou AUV).
Ils diffèrent peu les uns des autres et ont des fonctionnalités très similaires. Nous pensons que les fabricants de robots qui équiperont leurs appareils d'un système de navigation simple et fiable bénéficieront d'un avantage décisif.
Lorsque nous avons commencé tous les trois, l'un d'entre nous (
Creathor ) était à Moscou, s'occupant de tous les problèmes d'organisation, financiers et marketing, et moi et
StDmitriev étions à Volgograd, et nous,
jusqu'aux genoux dans l'eau froide, avons assemblé 4 bouées à partir d'un bateau gonflable acheté dans le décathlon. Avec le temps, cela nous a pris de 15 à 30 minutes. C'est en partie pourquoi, quand ils me disent que mettre des bouées est difficile et long,
ma main tend vers le Mauser et mon visage exprime généralement la perplexité.
Plus profond encore
Cette fois, en réalisant les quatre tests, nous avons tout monté dans deux voitures particulières:

Ces bagages étaient nécessaires pour les tests:
- Véhicule sous-marin ROVBUILDER RB-150 avec un câble de 100 mètres et un boîtier de commande
- Caisse avec quatre bouées RedBASE
- Génératrice à essence de 800 watts
- Kayak double gonflable "Shuya"
- Table pliante avec quatre chaises pliantes
- Quatre dalles de pavage avec des cordes de 20 mètres comme ancres
- ordinateur portable
- Stock de nourriture pour 5-6 heures pour quatre personnes
Avec toute la simplicité apparente, nous ne pourrions pas travailler avec le système UHF avec un tel ensemble de bateaux - pour monter l'antenne UHF, vous avez besoin d'un bateau avec un fond dur et une tige. En même temps, il devrait être constamment sur l'eau. Par exemple, à 0 °, l'air n'est pas très confortable, et parfois c'est tout simplement impossible (voir "vent, vagues, tangage").
Le «poste de contrôle» a été déployé en 10 minutes environ, et dans notre cas, il ressemblait à ceci:

Traditionnellement, tous les tests qui nécessitent un réservoir assez spacieux sont effectués à l'
embouchure de la rivière Pichuga , à l'endroit où il se jette dans le réservoir Volgograd.
Plongez plus loin
J'ai mentionné que les bouées sont généralement installées en 15 à 30 minutes et que cette fois ne fait pas exception. De plus, j'ai spécialement démarré le chronomètre, et deux personnes sur un kayak ont réussi à le faire en 24 minutes, à rames, se battant avec le vent et l'excitation, comme de vrais Papanins.

La photo montre comment les bouées sont situées dans un petit kayak gonflable. Les quatre pièces.
Vous pourriez penser que l'appareil est également immergé depuis un bateau, mais pas du tout: l'appareil est mis à l'eau depuis le rivage avec l'aide d'une personne équipée d'une paire de bottes en caoutchouc:

Et voici les premières images du monde sous-marin:

Oui, ce n'est pas la mer Rouge pour vous :-) L'eau semble transparente, mais en fait la visibilité près de la côte ne dépasse pas 1-2 mètres.
Un problème grave est immédiatement devenu clair - sur l'écran de l'opérateur par une journée ensoleillée, rien n'est résolument visible (à l'exception de sa réflexion):

Dans le même temps, le GoPRO HERO3 + est installé en tant que caméra sur le robot. Nous étions bouleversés et découragés par ce fait, mais il était complètement impossible de contrôler l'image, au vu de l'écran qui clignote à l'extrême. Peut-être qu'un écran éliminera cet inconvénient. D'ailleurs, certains fabricants de robots équipent leurs produits de lunettes VR.
Après coup, lors de la mise en ligne de la vidéo depuis la caméra, notre frustration est devenue encore plus profonde: l'image est, en principe, très bonne, et il est tout à fait possible de travailler avec. Quel dommage que nous n'ayons pas vu tout cela dans le processus!
Et voici la première touche du fond et des éléments du paysage «lunaire» à une profondeur de 13 mètres:

Littéralement quelques secondes plus tard, après avoir navigué un peu en avant, l'appareil est tombé sur un rondin inondé, recouvert de petits obus:

En réalité, la qualité d'image est légèrement meilleure, mais je dois prendre des captures d'écran de la vidéo capturée à l'aide du GoPRO intégré.
Dans l'image suivante, si vous regardez de plus près, dans le coin supérieur droit, vous pouvez voir le premier poisson rencontré sur le chemin du
creuset postal :

Au cours des tests, nous ne savions pas encore que l'appareil photo écrivait une bonne et parfois excellente image et nous étions très perplexes devant la nécessité de contrôler l'appareil pratiquement à l'aveugle.
Néanmoins, ils ont décidé de s'en tenir à un scénario prédéterminé. Il était censé inonder un objet facilement visible du bateau, enregistrer les coordonnées de cet endroit à l'aide d'un téléphone GPS, puis essayer de venir à cet endroit avec un robot, guidé par les indications de notre système de navigation.
Étant donné que le texte est généralement lu en diagonale sans accorder suffisamment d'attention aux détails, je conclus que dans ce système dans l'émetteur acoustique des bouées, l'enroulement du transformateur élévateur doit être en bois, tandis que la FEM en bois y sera induite et le courant en bois circulera.
Dans l'un des passages au-dessus du bas, la caméra de l'appareil photo a capturé un filet de pêche noyé:
À ce stade, les vues que nous avons obtenues sous l'eau en cours de test se terminent.
Qui veut évaluer la qualité de la vidéo de ses propres yeux, nous attachons un lien vers l'
un des enregistrements sur youtube . L'enregistrement est donné sans aucun traitement ni modification. Ceux qui le souhaitent peuvent indépendamment conclure sur la commodité de gérer et d'exécuter des actions significatives sous l'eau (par exemple, rechercher quelque chose) uniquement par l'image de la caméra, sans navigation.
Nous sommes arrivés à la conclusion qu'il est complètement impossible de contrôler l'appareil en utilisant uniquement l'image; Fondamentalement, nous étions uniquement guidés par notre système de navigation, qui montrait en ligne l'emplacement actuel de l'appareil sur la carte.
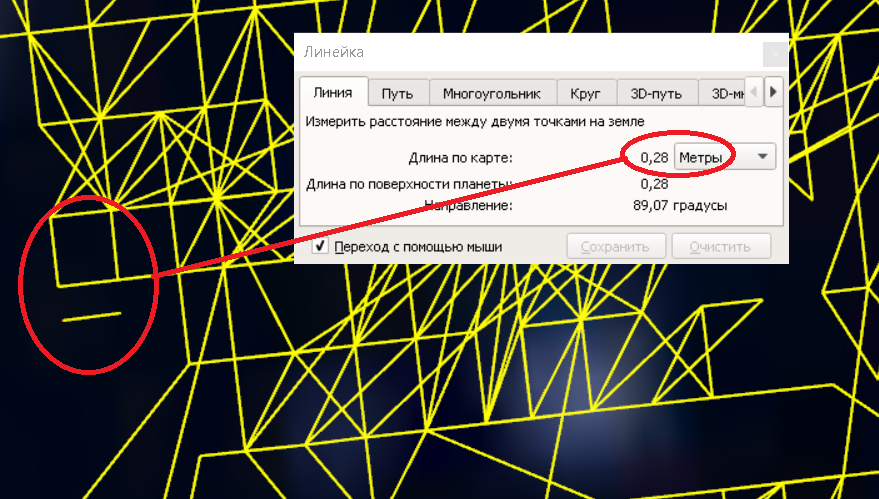
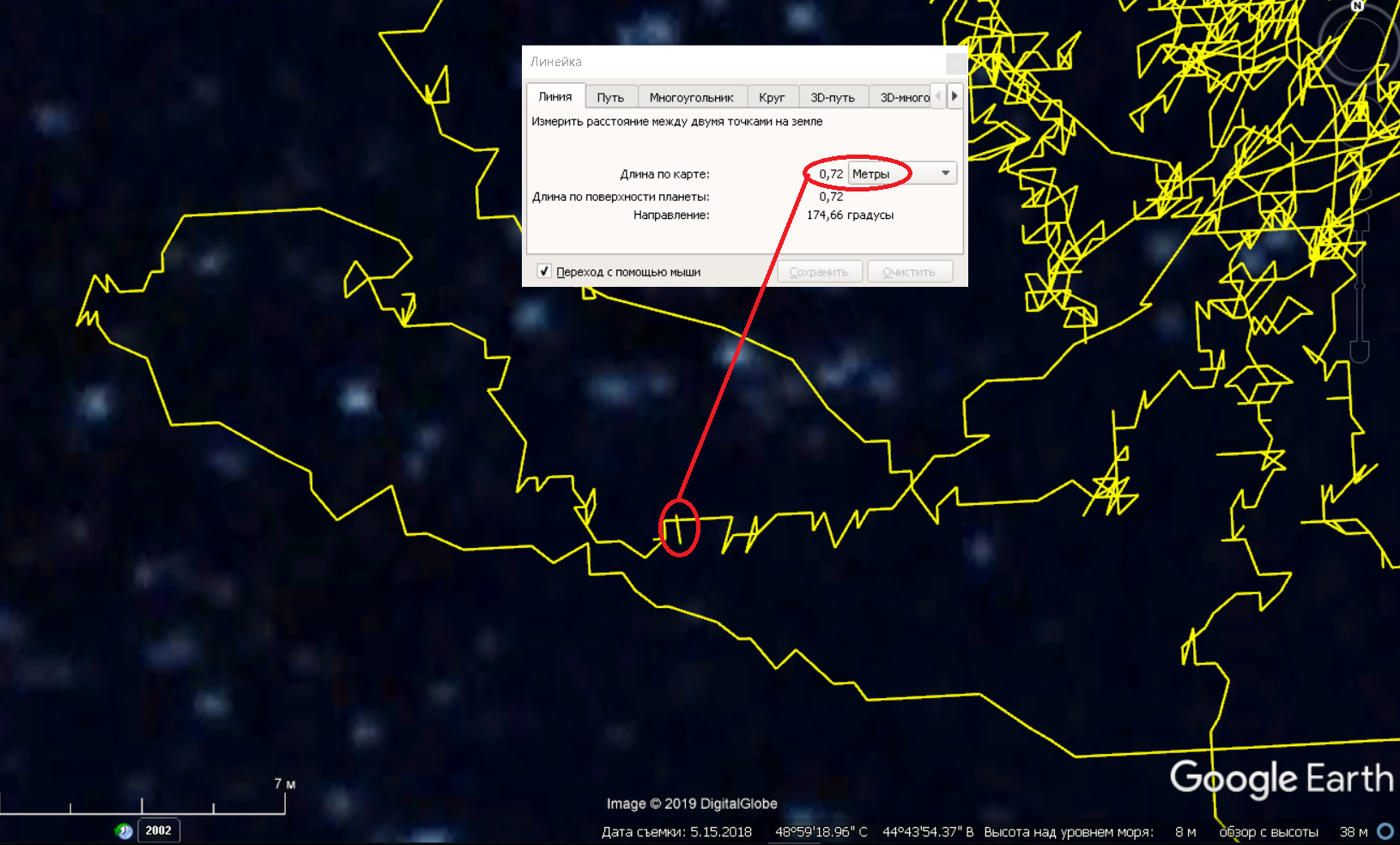
La résolution du système dans un vrai réservoir, d'environ 30 centimètres, est agréable, comme le montre la grille tracée par la piste:
Comme dans d'autres cas, la dispersion des points pendant le mouvement se situe dans la plage de 1-1,5 mètres:
La trace finale du mouvement de l'appareil ressemble à ceci:
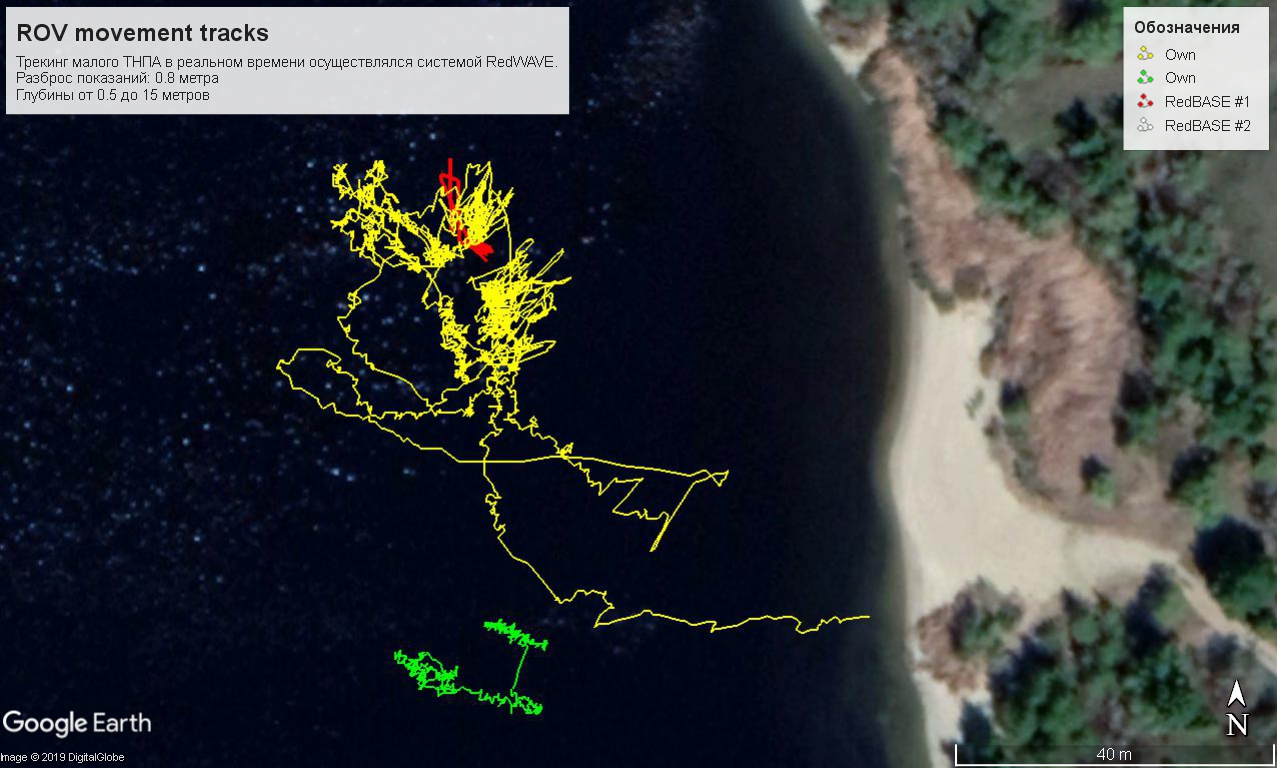
Malgré le fait que nous n'avons pas calculé le lieu de travail un peu et près de la moitié de la piste (la partie gauche des lignes rouges) se trouve en dehors de la base, c'est-à-dire en dehors de la bouée, où le système devrait fonctionner bien pire. Cependant, à l'exception de quelques émissions, le système a fonctionné normalement.
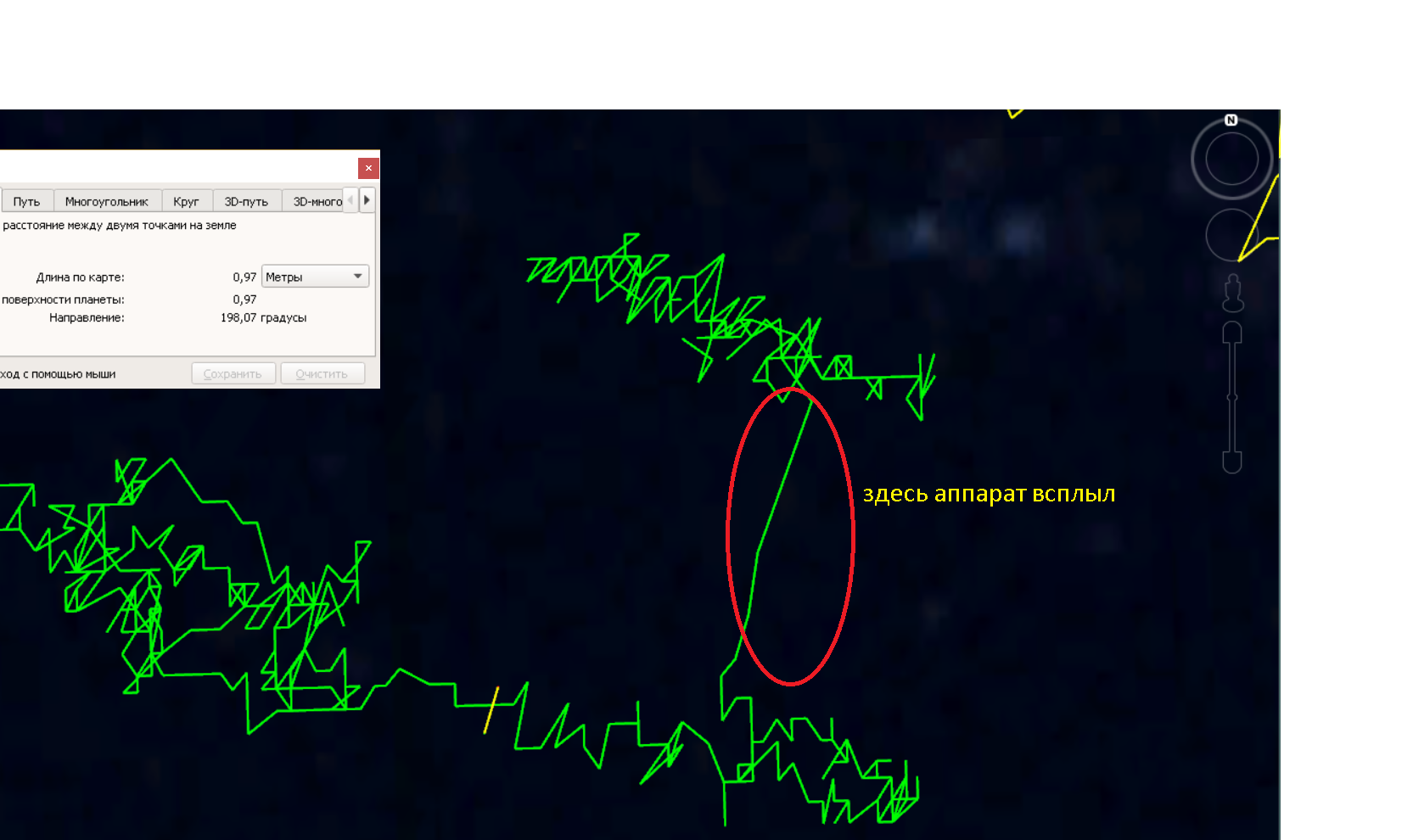
Et dans l'une des allées, l'appareil s'est approché très près du site proposé d'inondation de l'objet:

Mais en regardant attentivement une heure ou plus de la vidéo enregistrée par la caméra embarquée du véhicule, nous n'avons jamais vu l'objet souhaité.
Il peut y avoir plusieurs raisons à cela: premièrement, pour nous, c'est littéralement la première expérience de contrôle de l'appareil dans un véritable plan d'eau, et deuxièmement, l'écran anti-éblouissant nous a privé de la possibilité «en ligne» d'observer ce qui se passe dans l'eau près de l'appareil. Troisièmement, l'appareil réagit
farouchement et furieusement au «virage du volant» et il est très difficile de le contrôler à partir d'une position inhabituelle, il est même difficile de maintenir un mouvement simple.
Juste au cas où, je joins la
piste résultante pour que ceux qui sont intéressés puissent la tordre.
En bas
En conclusion, je veux dire que nous aimons tous comme une pierre tombée de l'âme - nous avons finalement testé le système pour sa destination.
Nous avons obtenu un très bon résultat (et de l'expérience!), Géré un véhicule sous-marin, cuisiné de la soupe aux champignons sur du charbon de bois, pris une photo et eu généralement une journée positive.Merci de votre attention, comme d'habitude, nous vous serons infiniment reconnaissants pour les commentaires et critiques constructives!UPD!
Nous avons rassemblé une courte vidéo avec quelques explications . Y compris le processus d'affichage de la trajectoire de l'appareil en temps réel dans SAS.Planet