Si vous avez déjà écrit un logiciel pour contrôler un bras de robot ou tout mécanisme semblable à un robot en général avec plus de trois degrés de liberté, vous savez que la plupart du temps il faut pour programmer les mouvements eux-mêmes. Imaginez maintenant que vous avez construit un bras de robot en connectant les liens et les lecteurs comme vous le souhaitez, et le logiciel a déterminé les longueurs des liens, leur emplacement, les angles de rotation, etc.
C'est exactement ce que les chercheurs de Columbia Research ont fait lorsqu'ils
ont écrit un logiciel qui
apprend à configurer un bras robotisé contrôlé par celui -
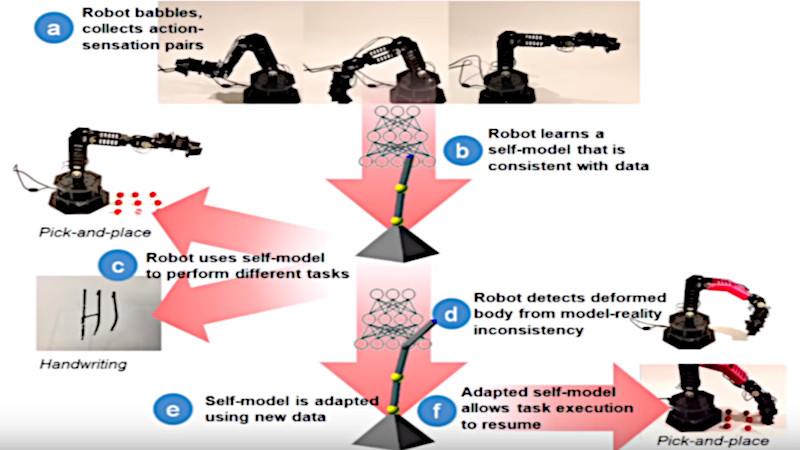
ci , sans aucune idée initiale de la physique, de la géométrie ou des caractéristiques dynamiques des moteurs. Immédiatement après le premier lancement, il ne sait pas quelle forme du robot, comment fonctionnent ses moteurs, comment et ce que chacun d'eux affecte. Pendant environ un jour et demi, effectuant au début des mouvements prudents qui semblent aléatoires et recevant des commentaires sur ce qui se passe, le logiciel utilisant une formation approfondie configurera le simulateur intégré afin que le robot virtuel soit autant que possible physique.
Le chef de projet Lipson et son étudiant diplômé Robert Kwiatkowski expérimentent avec un bras de robot articulé à quatre degrés de liberté. Au début de la formation logicielle, le modèle était inexact et l'ordre de connexion des liens n'était pas déterminé. Après 35 heures de formation, le modèle correspondait à la réalité avec une précision d'au moins quatre centimètres. Ensuite, le logiciel a forcé le roboruk à prendre et déplacer des objets, tandis qu'il y avait un recalibrage supplémentaire après chaque mouvement selon un modèle formé uniquement par une formation indépendante.
Afin de déterminer si un tel logiciel peut détecter des dommages au bras du robot, un autre similaire mais spécialement déformé a été imprimé à la place de l'une des pièces. Le logiciel a déterminé qu'il avait changé et a apporté les modifications appropriées au modèle. Bientôt, il a accompli les tâches de levage et de déplacement d'objets légèrement pires.
Étant donné que l'idée interne du logiciel sur l'appareil du robot n'est pas statique, cela lui permet non seulement d'agir de mieux en mieux, mais aussi de s'adapter aux dommages et aux changements structurels. De plus, tout continuera à fonctionner avec l'usure progressive des pièces et leur remplacement par des formes légèrement différentes.
Bien sûr, un roboruk géré par un tel logiciel ne deviendra pas très bientôt aussi précis que
Dexter, un roboruk avec un logiciel traditionnel qui a décerné un prix à ses développeurs au concours Hackaday 2018 , mais il est intéressant de voir comment cela fonctionne: