Le cinquième mois terrestre de travail de l'autre côté de la lune de l'atterrisseur Chang'e-4 et du rover Yutu-2 a commencé.
Les deux appareils ont survécu avec succès à la quatrième nuit froide au clair de lune, maintenant ils sont sortis du mode veille, poursuivant leurs recherches sur la surface complexe du dos de la lune et de l'espace extérieur environnant.
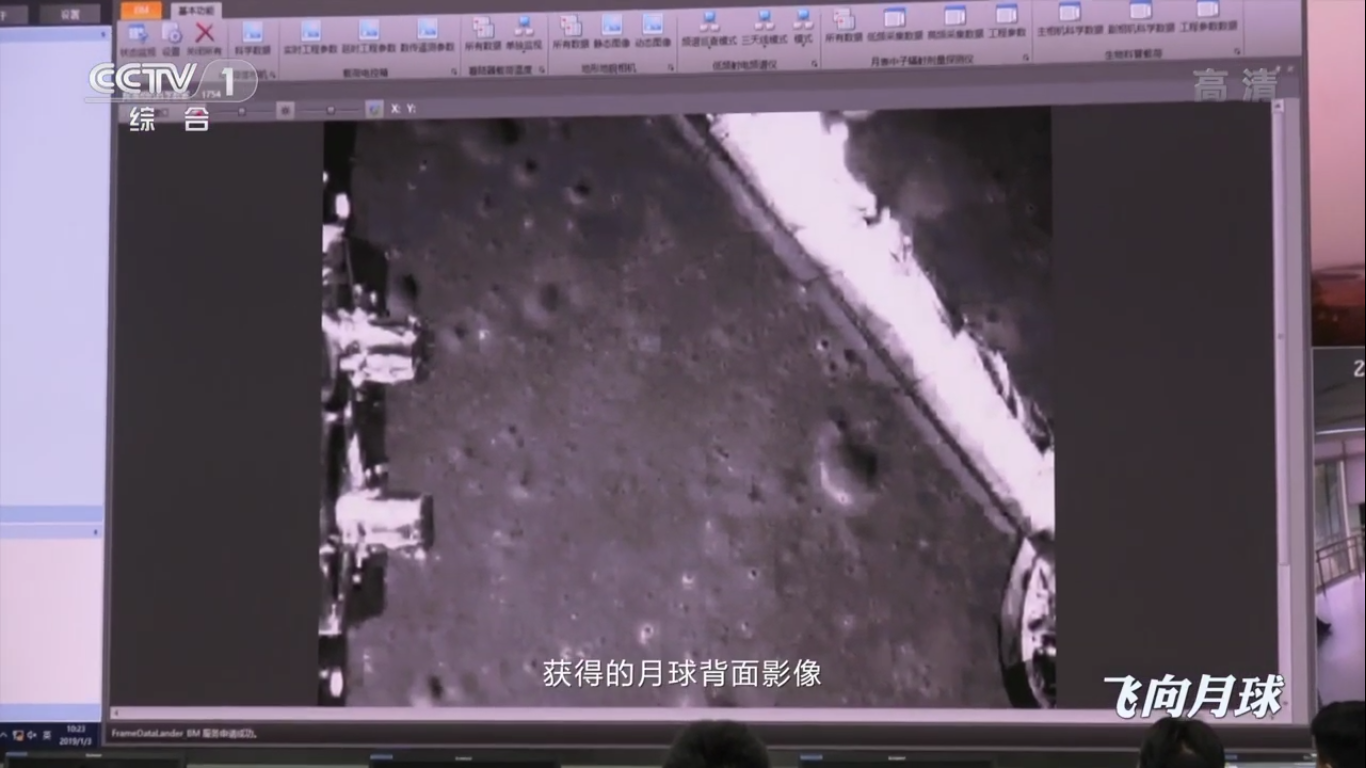
Nouvelles photos du dos de la lune, les moments de lancement et d'atterrissage.
Attention, il y a beaucoup de photos à l'intérieur de la publication.Documents précédemment publiés sur la mission Chang'e-4: Le rover Yutu-2 est sorti du mode veille le 28 avril 2019 au matin, le 28 avril au soir, l'atterrisseur Chang'e-4 s'est également réveillé et les deux véhicules ont commencé leur cinquième journée de travail sur la Lune.
La nuit, de l'autre côté de la lune, selon les capteurs des modules Chang'e-4, la température sur la surface lunaire chute (minimum) à moins 190 degrés Celsius.
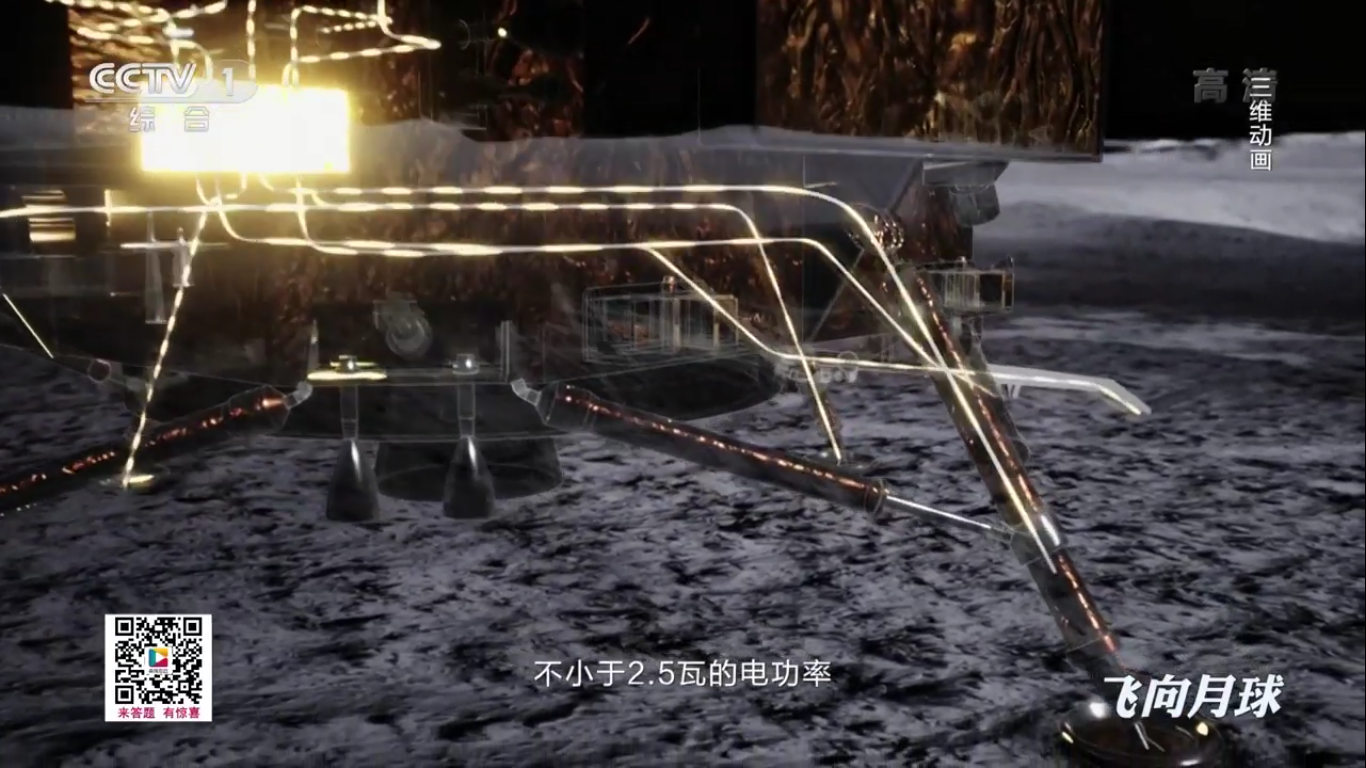
Les unités de chauffage développées au Centre nucléaire fédéral russe (VNII Physique expérimentale (VNIIEF) sont responsables du chauffage des modules Chang'e-4 pendant une nuit au clair de lune, ce sont des sources de chaleur par rayonnement (RIT) et des sources d'électricité radio-isotopique (RTG) conçues pour alimenter les systèmes chinois. mission lunaire.
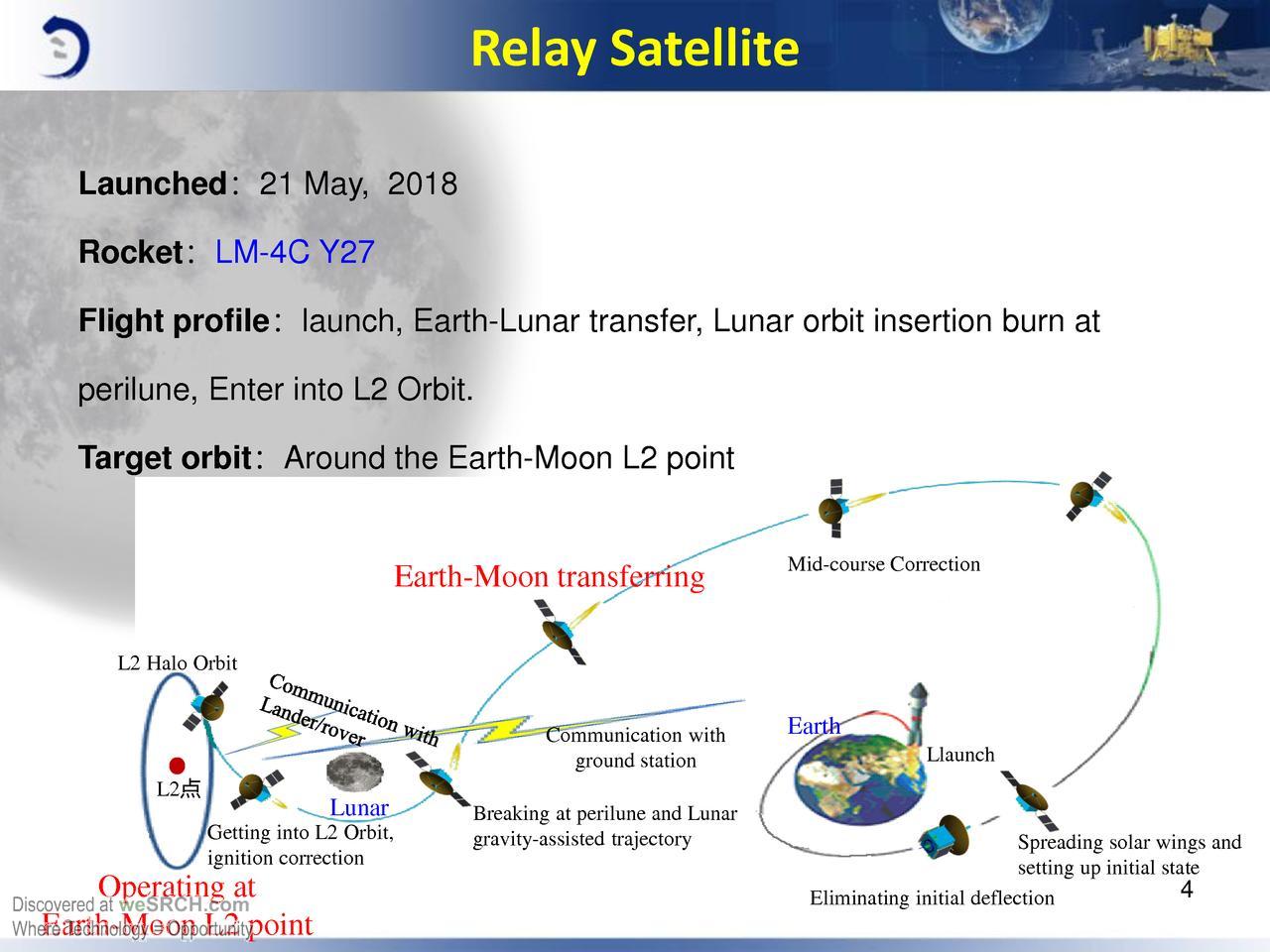
Données sur le projet et les modules de la mission lunaire Chang'e-4:21 mai 2018: Le satellite relais Tseyuqiao (quarantième pont) a été lancé depuis le cosmodrome chinois de Xichang, il est nécessaire pour organiser la communication entre la Terre et la face cachée de la Lune.
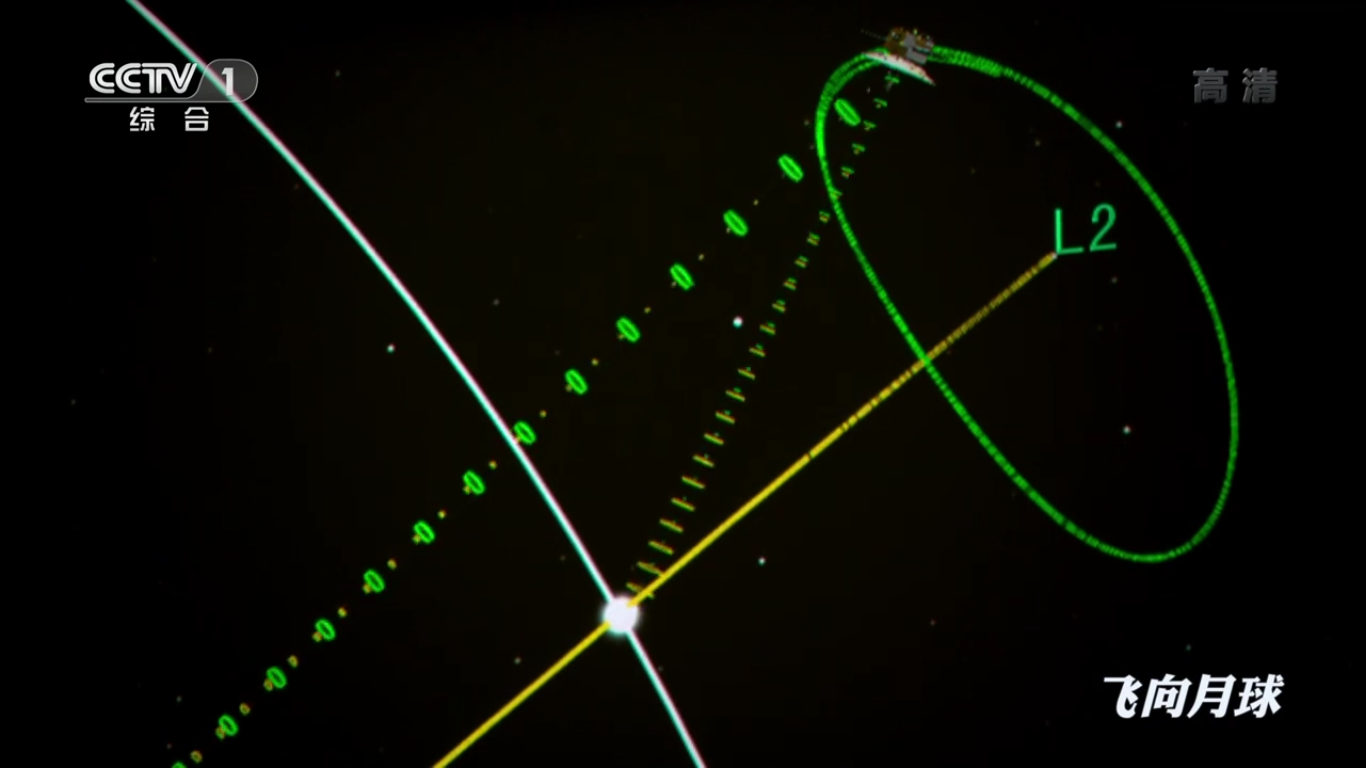
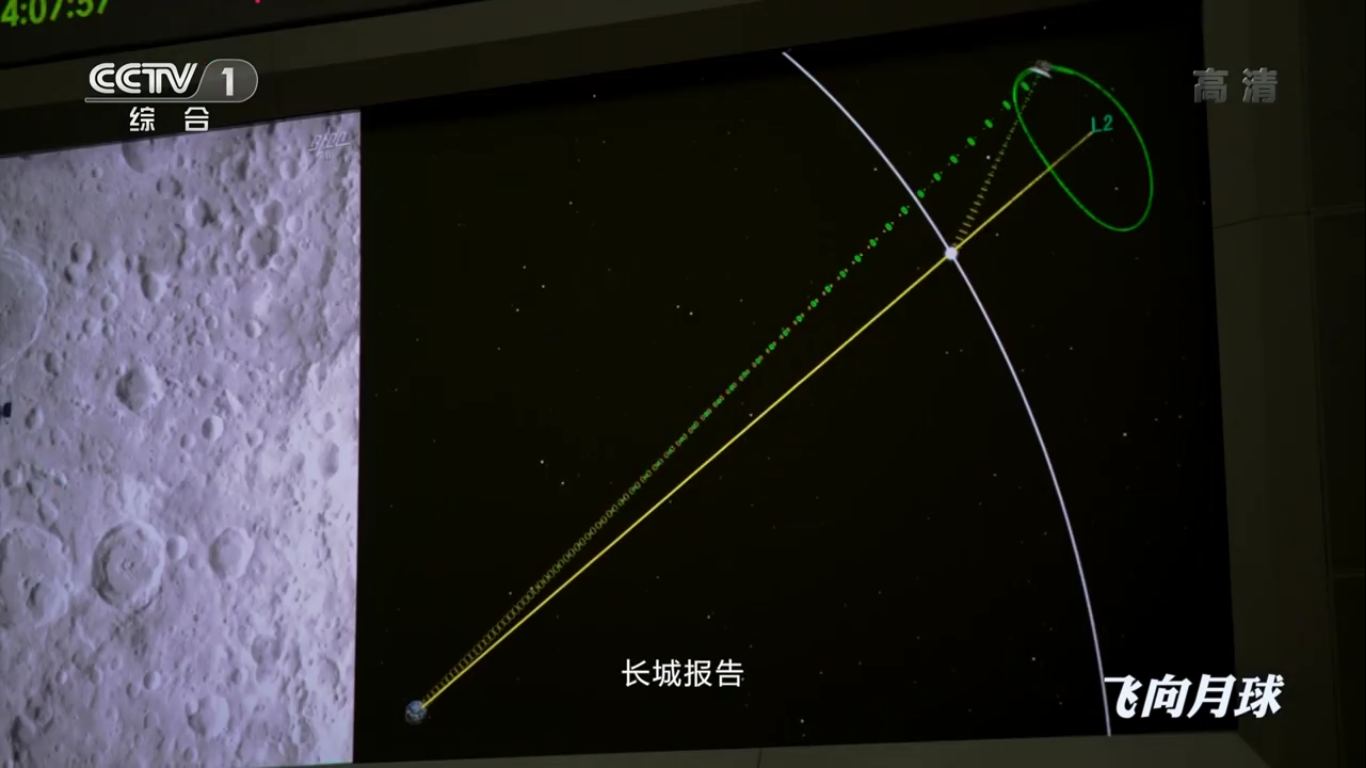
14 juin 2018: le relais satellite Tseyuqiao est entré en orbite autour du point Lagrange L2 du système Terre-Lune, à environ 65000 km de la Lune, devenant ainsi le premier satellite de communication sur cette orbite au monde.
8 décembre 2018: la fusée d'appoint Changzheng-3B avec la station Chang'e-4 a été lancée avec succès depuis le centre spatial de Sichan en Chine.
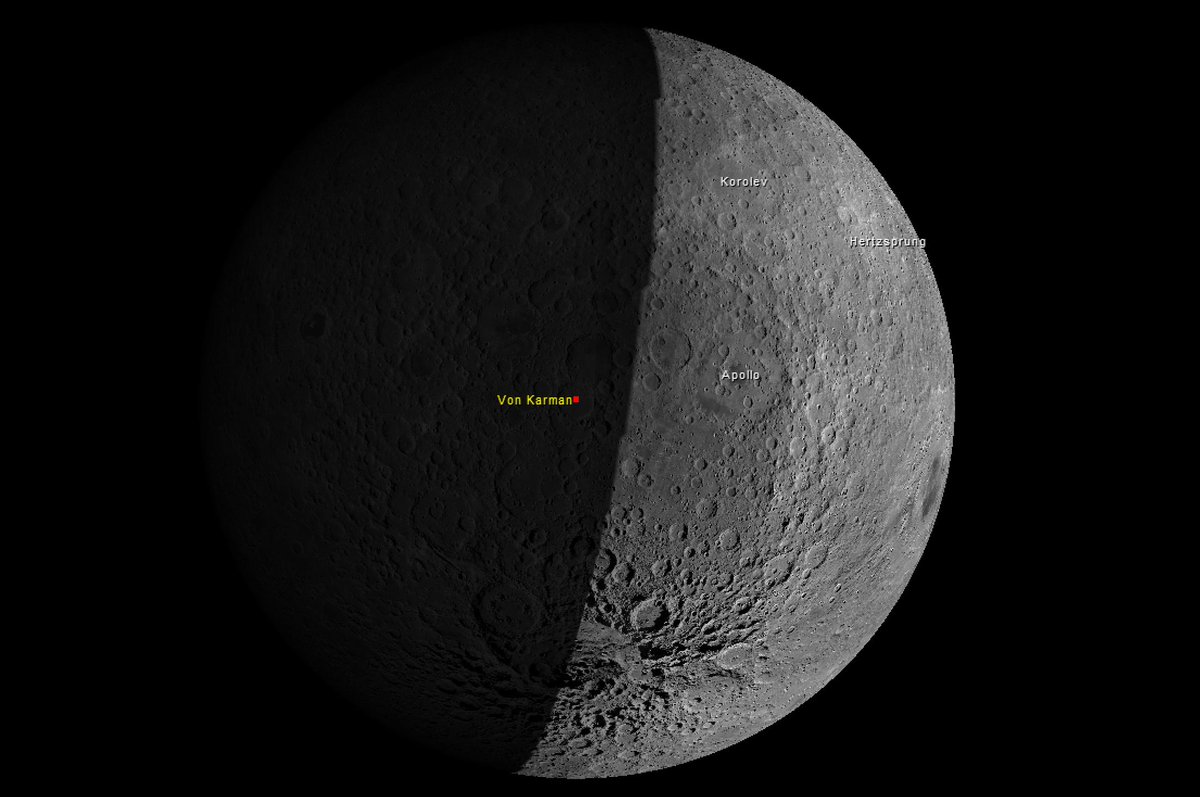
3 janvier 2019: l'atterrisseur Chang'e-4 atterrit dans le cratère Karman de l'autre côté de la lune. L'atterrisseur Chang'e-4 contient le deuxième rover lunaire chinois Yutu-2, un analogue modernisé du rover Yutu. Le personnel de la mission Chang'e-4 continue désormais de fonctionner normalement.
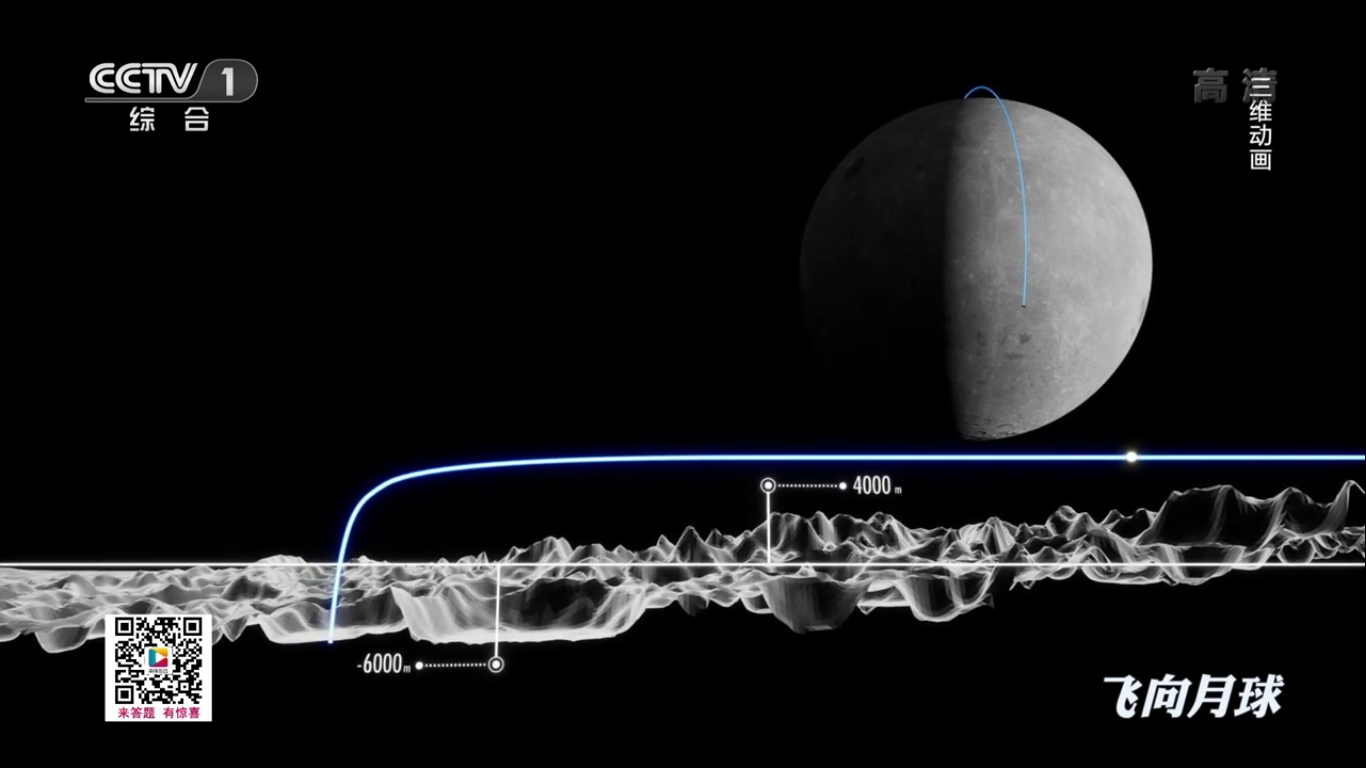
Vidéo de la procédure d'atterrissage de l'autre côté de la lune:
Après avoir terminé toutes les étapes de la procédure d'atterrissage réussie et installé des canaux de communication indépendants avec les véhicules Chang'e-4 (le module d'atterrissage et le rover), l'ère de l'exploration de l'autre côté de la lune a commencé.
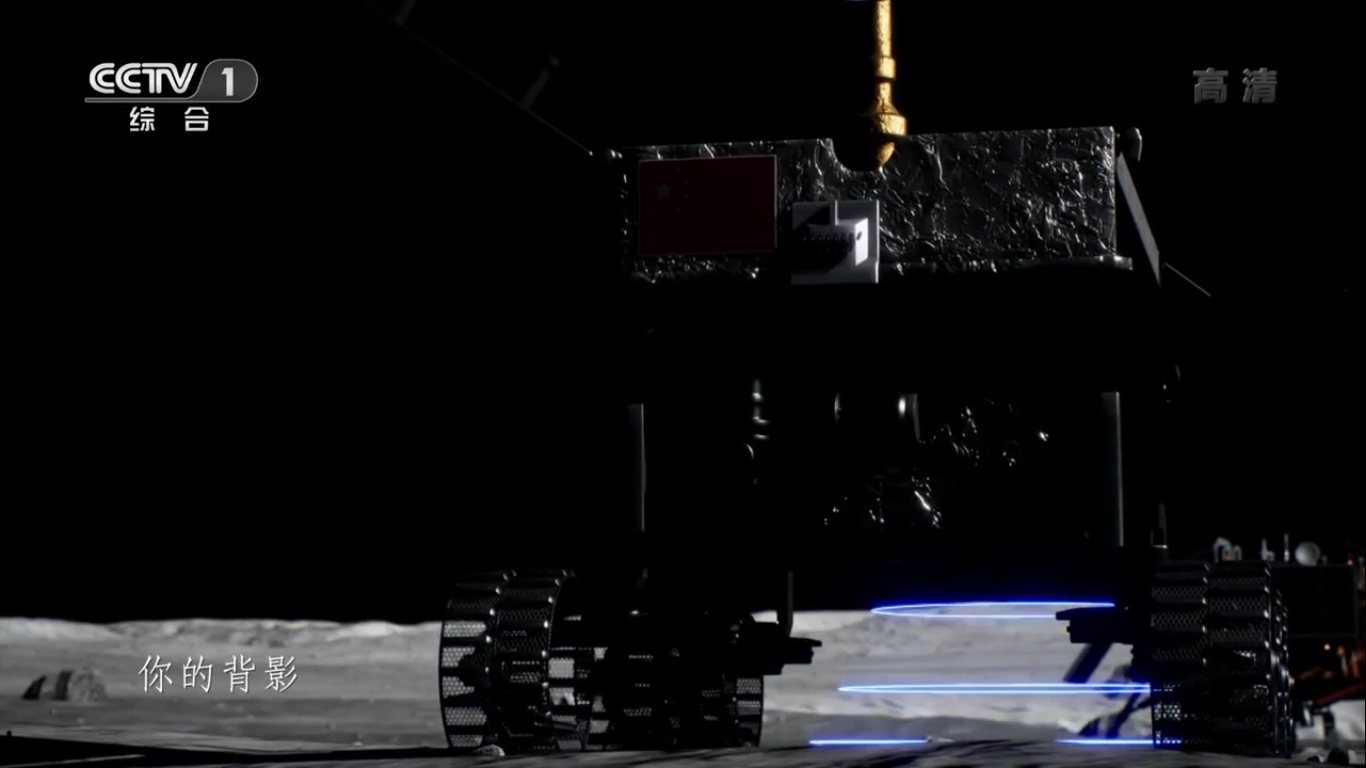
Vidéo de la descente du rover "Yutu-2":
Vidéo du voyage en rover «Yutu-2»:
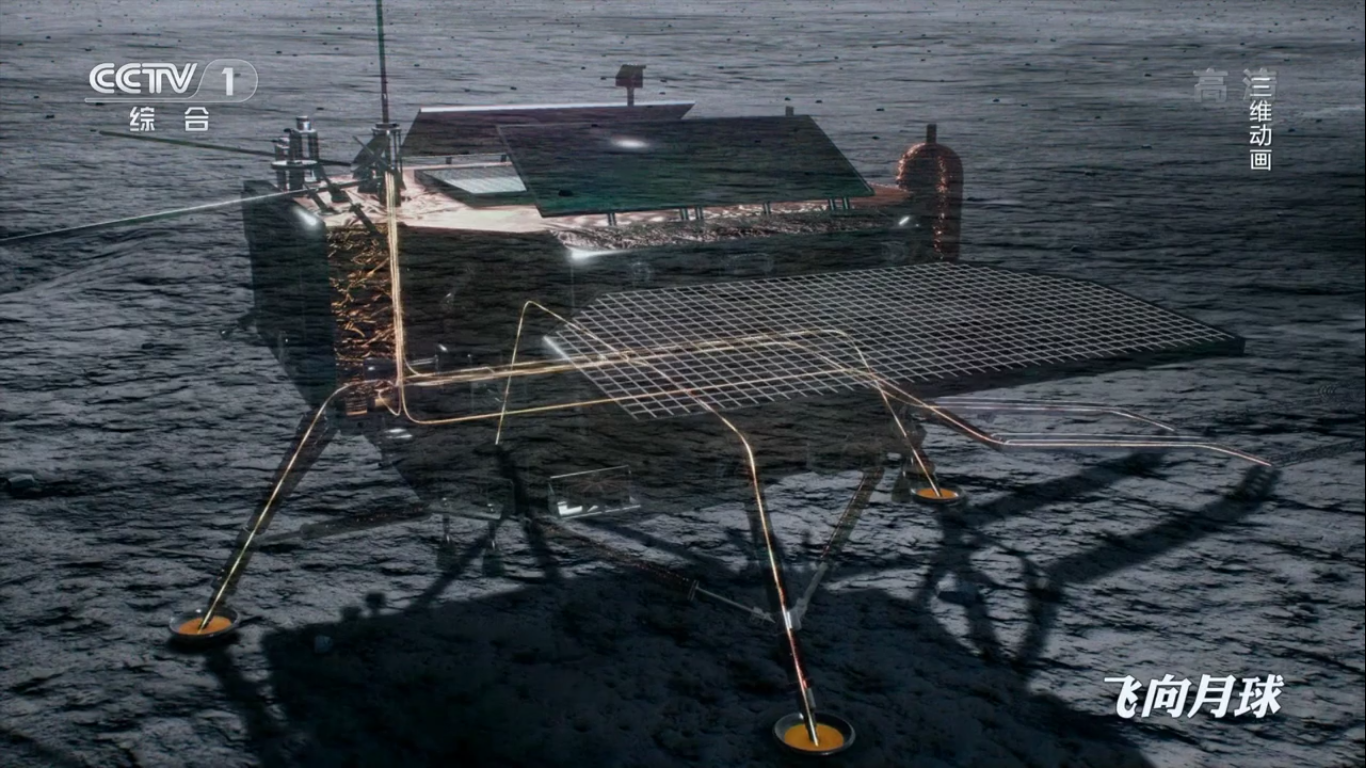
Le module de descente Chang'e-4:- 4,4 mètres entre les supports d'atterrissage opposés, poids 1200 kg.;
- Durée des travaux: une année terrestre.
Appareils installés:
- LFS - Spectromètre basse fréquence;
- LND - Lunar Lander Neutrons and Dosimetry (dosimètre à neutrons);
- TCAM - Caméra de terrain (caméra de paysage);
- LCAM - Landing Camera (caméra d'atterrissage).
 Rover "Yutu-2":
Rover "Yutu-2":- hauteur 1 mètre, largeur 1 mètre (sans panneaux solaires), 1,5 mètre de longueur, deux panneaux solaires pliants, six roues;
- le poids total du mobile est d'environ 140 kg (310 lb);
- capacité de charge d'environ 20 kg (44 lb);
- peut se déplacer sur les pentes et possède des capteurs automatiques pour éviter les collisions avec d'autres objets;
- Le rover est alimenté en électricité au moyen de deux panneaux solaires, ce qui permet au rover de fonctionner pendant une journée lunaire;
- vitesse maximale de 200 mètres par heure (cette vitesse sur la Lune ne peut toujours pas être atteinte, car les éléments en surface ne permettront pas d'accélérer et d'endommager le rover plus tôt);
- la zone de recherche maximale est de 3 mètres carrés. km;
- la durée de fonctionnement estimée est de 3 mois (2160 heures), le mobile a déjà dépassé sa durée de vie;
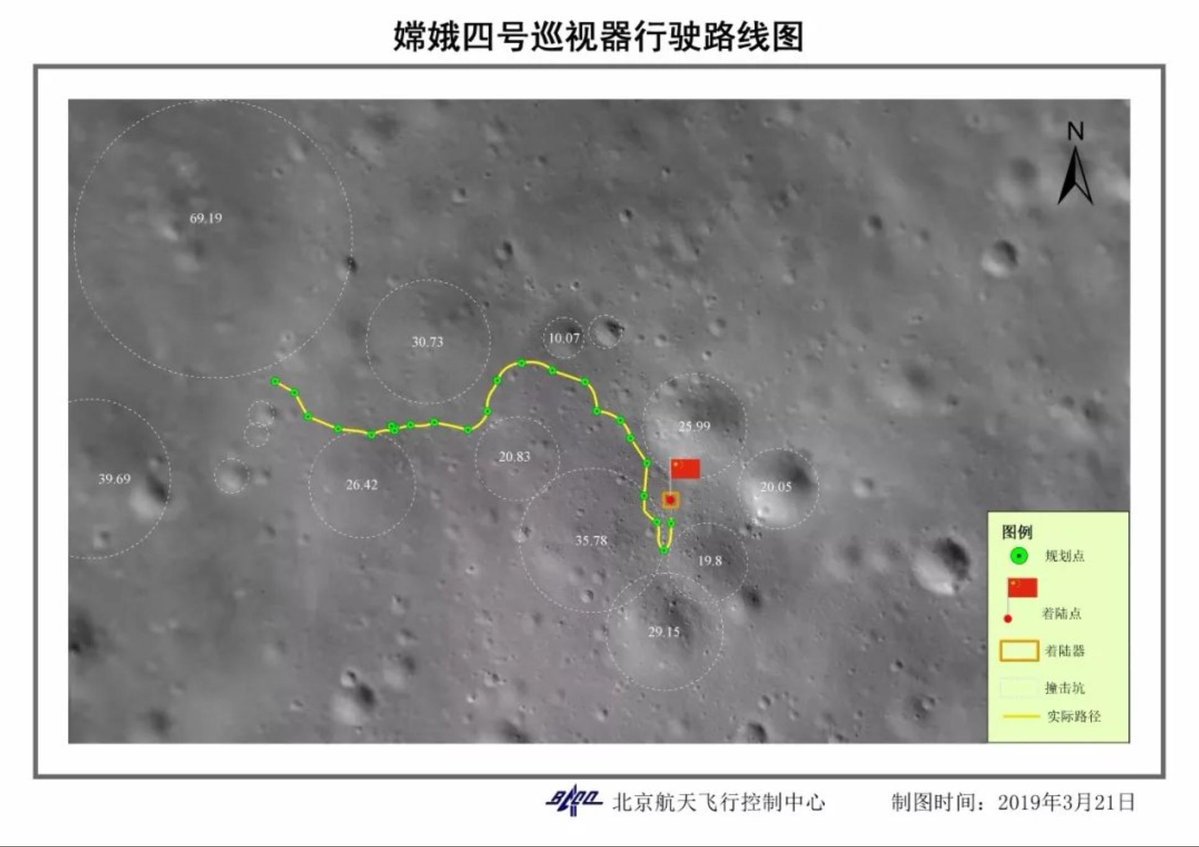
- la distance maximale estimée est de 10 km, maintenant 178,9 mètres ont été passés le long de la surface lunaire en cinq mois (1 place parmi les rovers de l'autre côté de la lune, sixième place parmi tous les rovers lunaires), un tableau de la distance des rovers est donné ici ;
- mode de contrôle: automatique (détour de petits obstacles), manuel (principal) - l'opérateur contrôle depuis la Terre.
Appareils installés:
- LPR - Lunar Penetrating Radar;
- ASAN - Advanced Small Analyzer for Neutrals (petit analyseur de particules neutres);
- VNIS - Spectromètre d'imagerie visible et proche infrarouge (spectromètre infrarouge);
- PCAM - Caméra panoramique (double caméra panoramique).
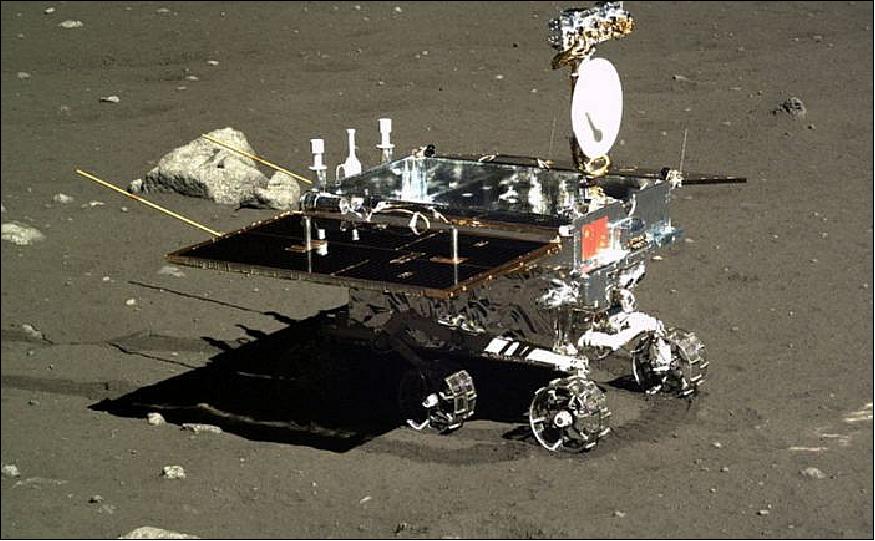
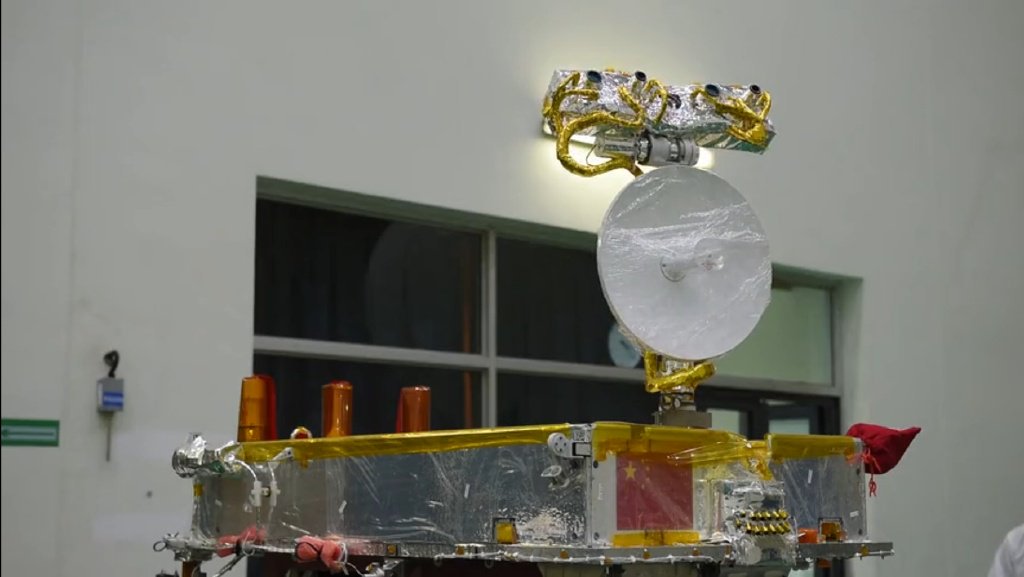
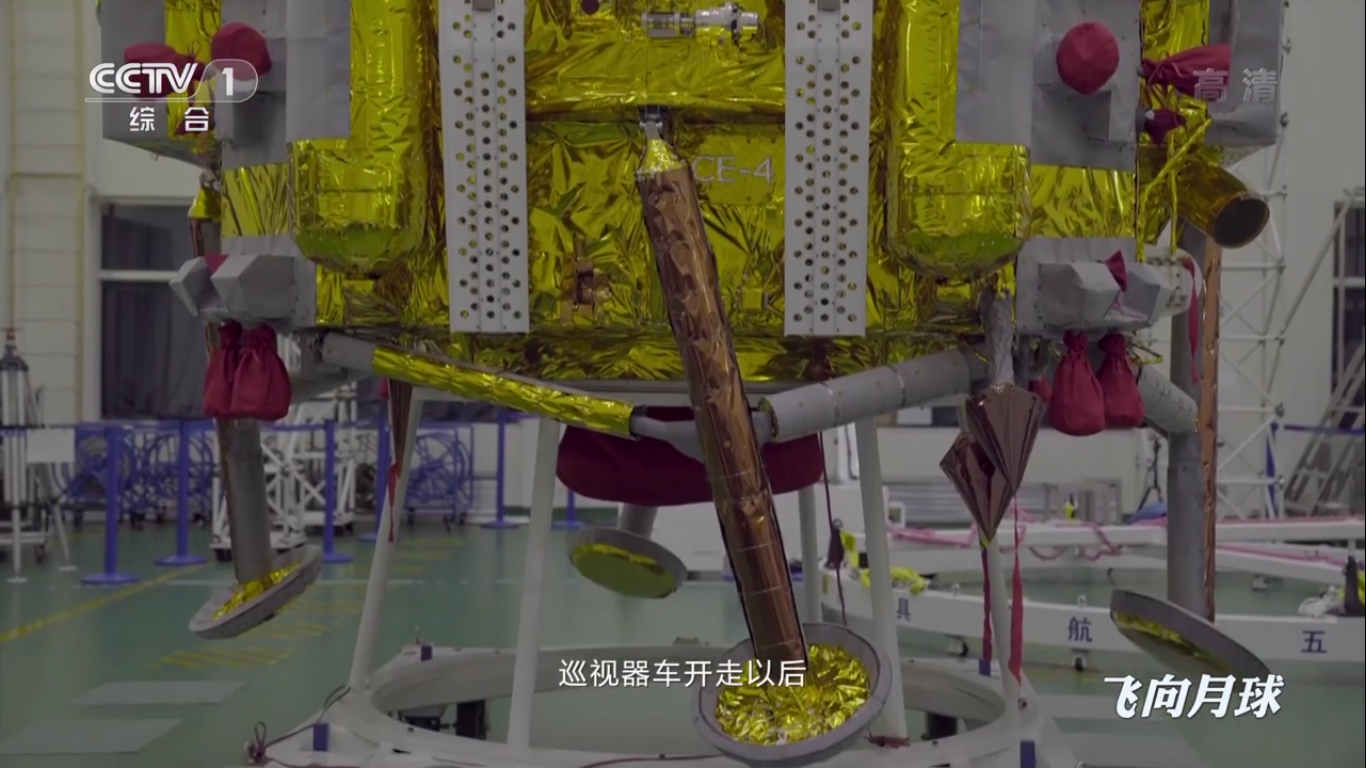
Photo rover sur Terre:



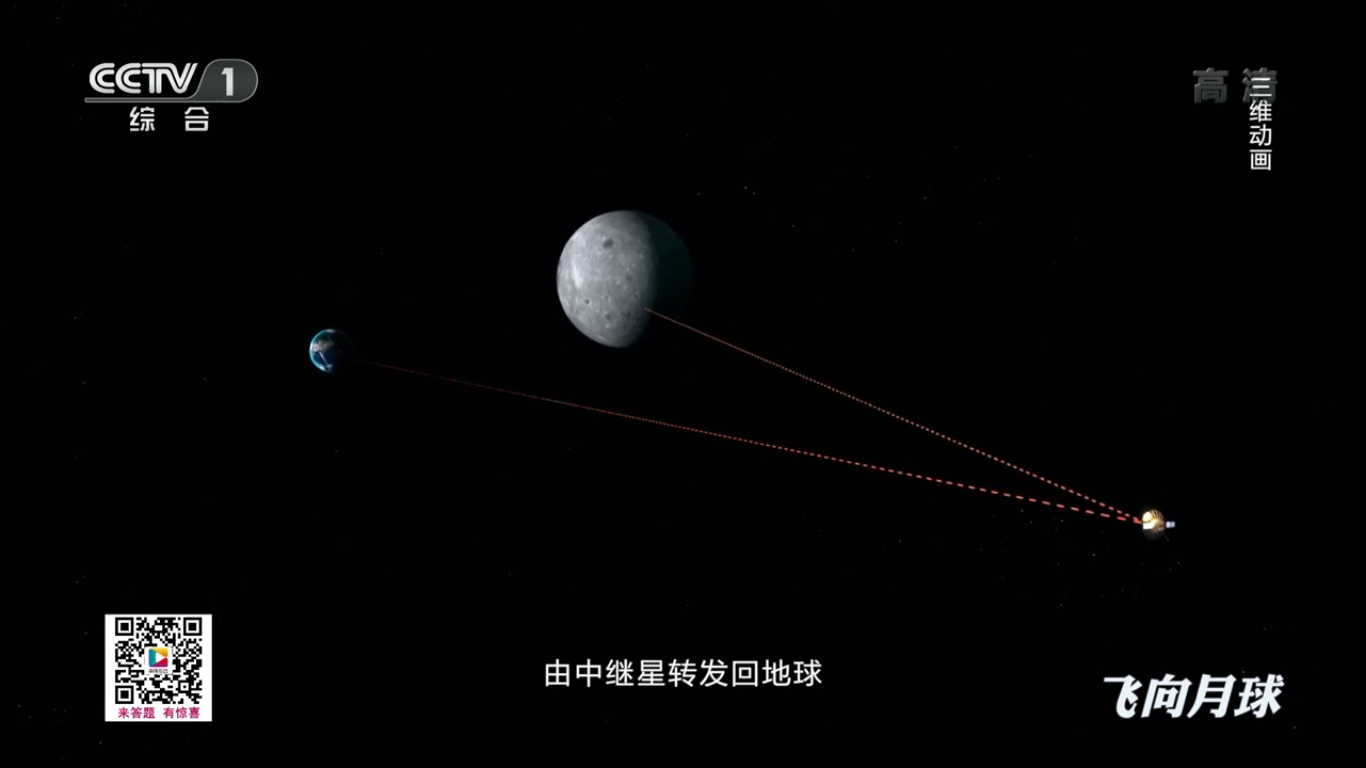
Le relais satellite Tseyuqiao (Quarante Pont), lancé le 21 mai 2018, fonctionne sur une orbite de halo autour du point spécial Lagrange Terre-Lune L2, stable à la gravitation, à partir duquel il peut maintenir une visibilité directe avec la Terre et l'arrière lunaire à tout moment. pour l'échange de données entre le MCC et les modules du projet Chang'e-4.
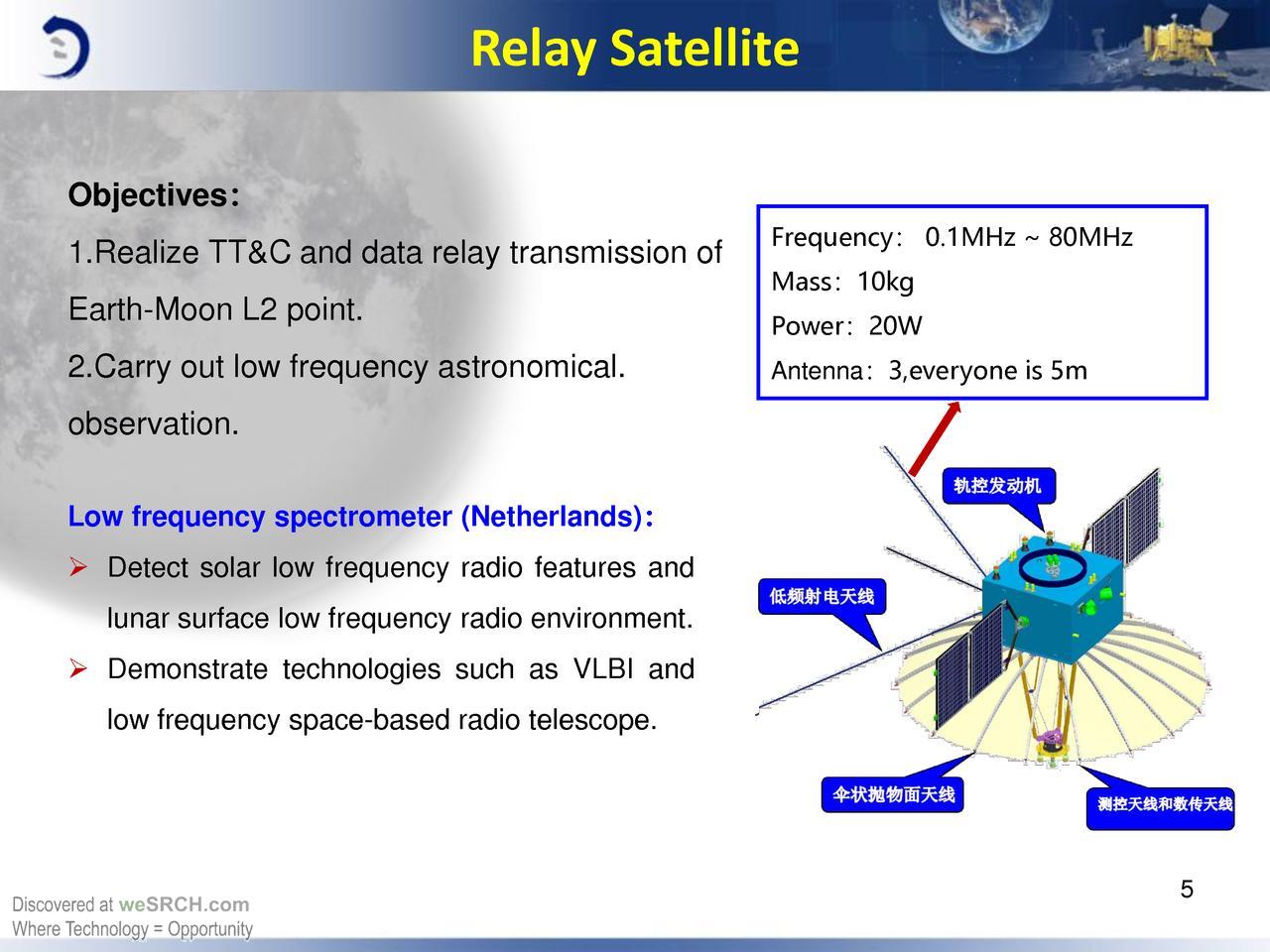
De plus, un spectromètre basse fréquence (relais LFS) avec trois antennes de cinq mètres est installé sur le satellite répéteur de Tseyuqiao, avec lequel est enregistrée l'émission radio basse fréquence du début de l'Univers, ce qui permet d'étudier sa structure.
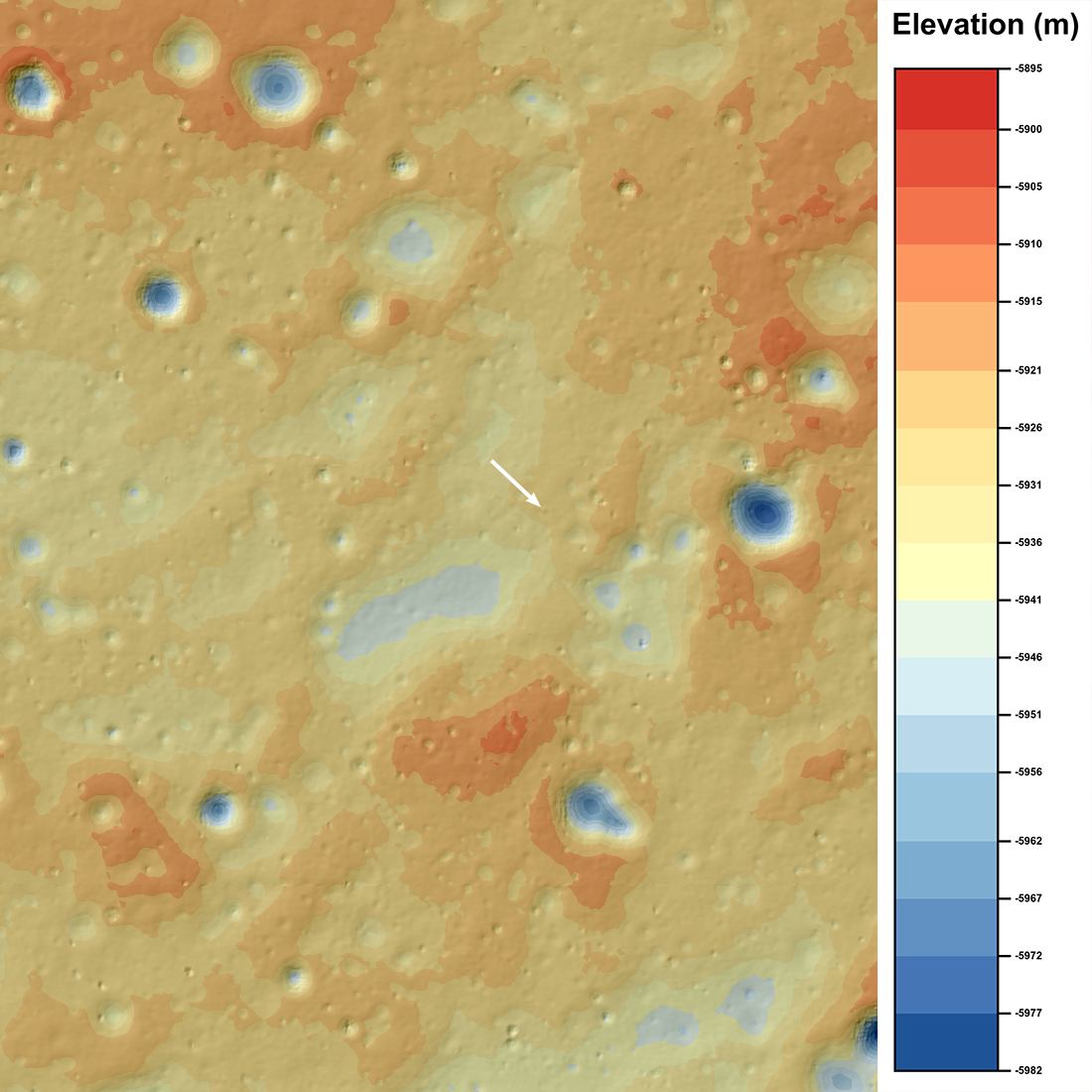
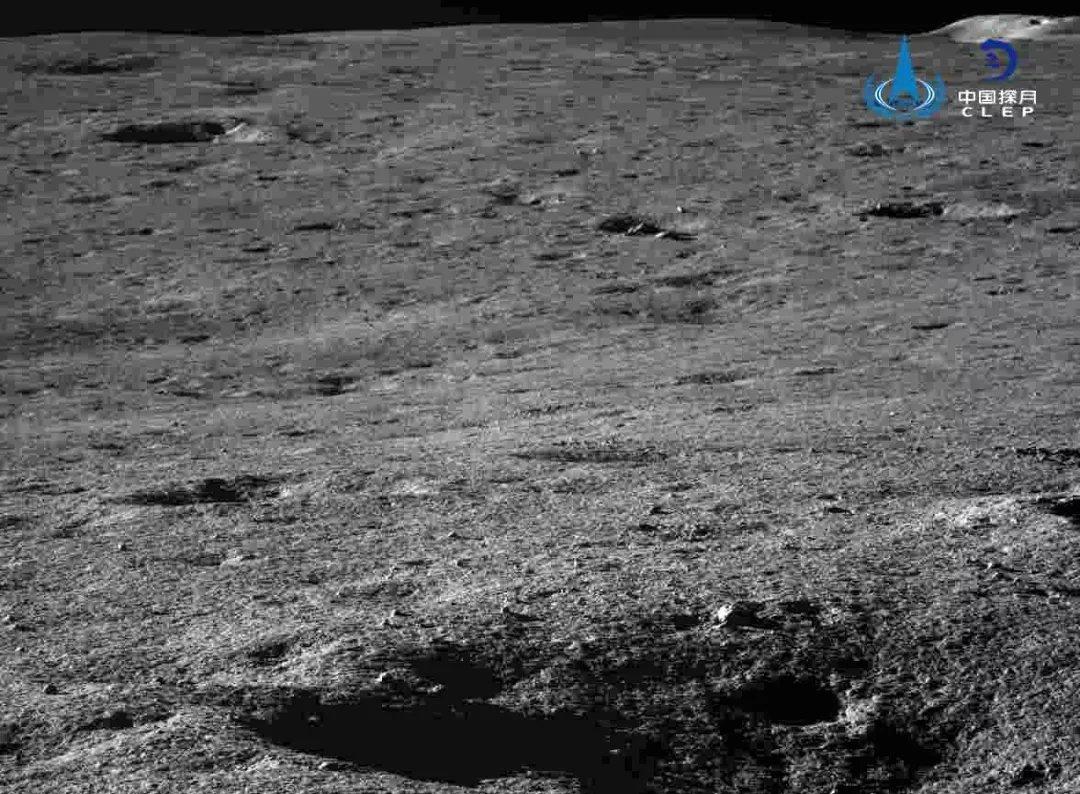
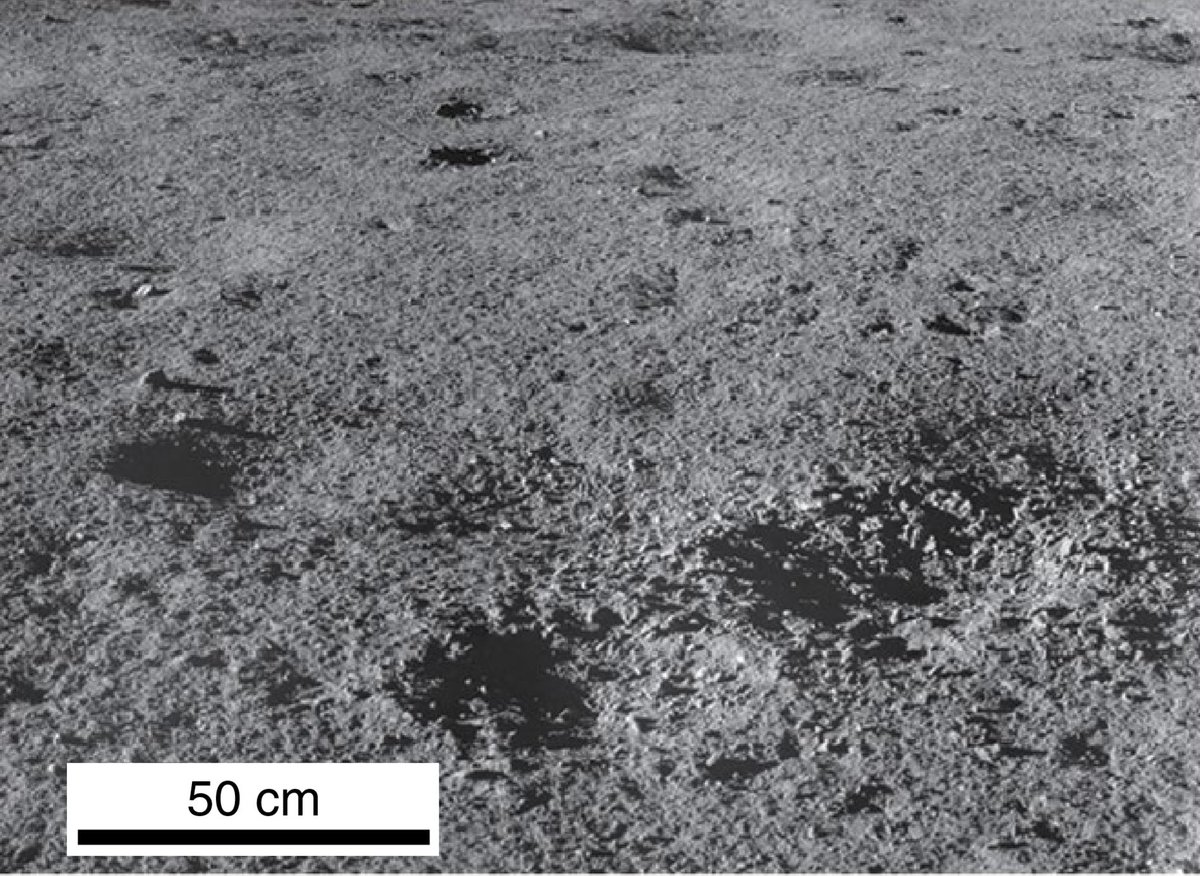
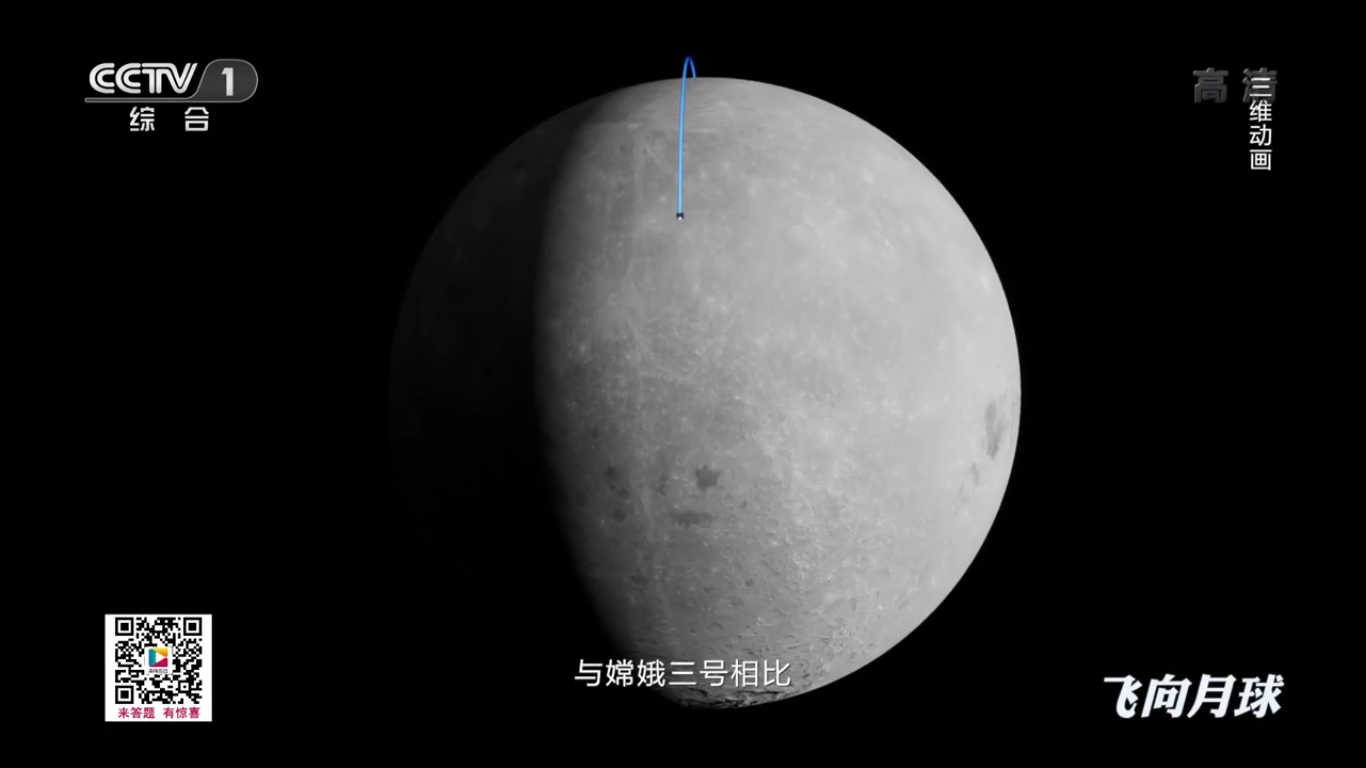
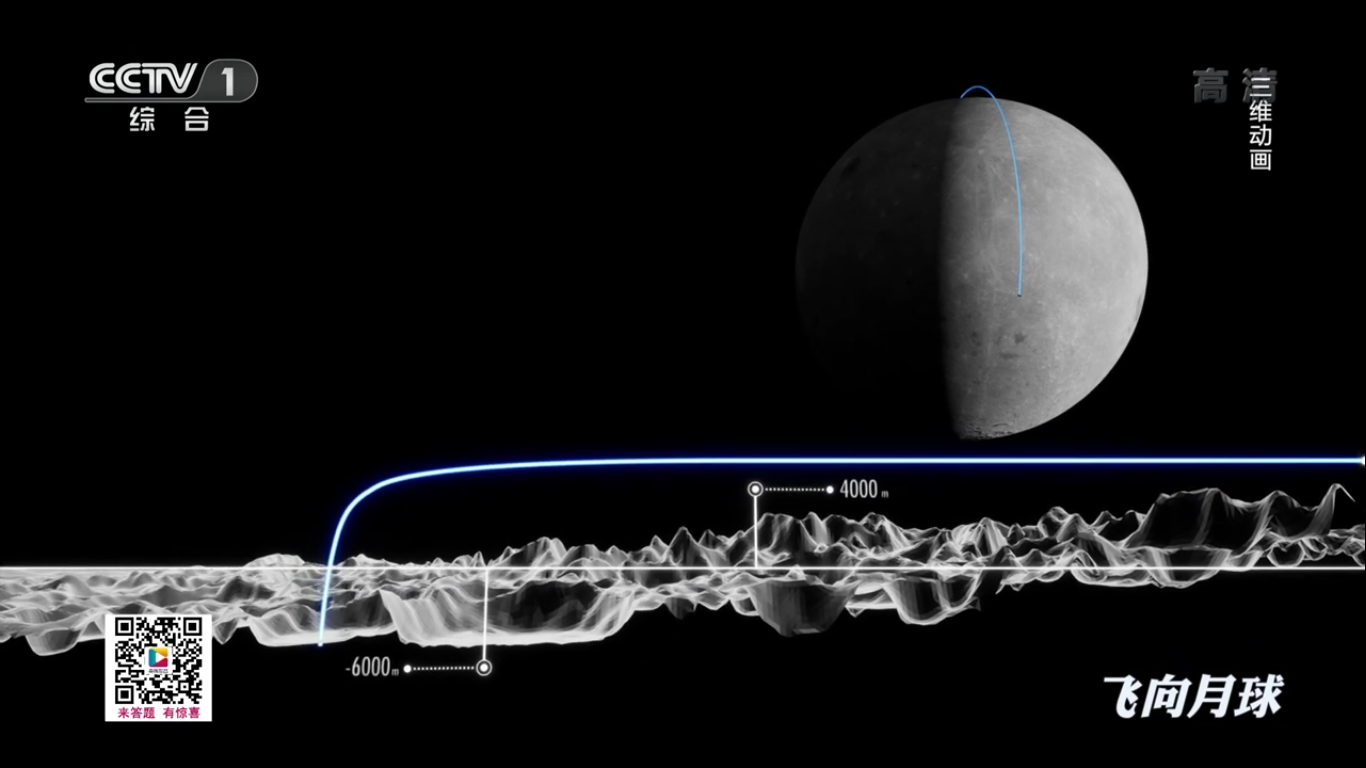
Le verso de la lune présente un relief plus complexe que le côté visible depuis la terre. La surface lunaire dans la zone d'atterrissage du module d'atterrissage Chang'e-4 est remplie de plis, de nombreux cailloux et de petits cratères.
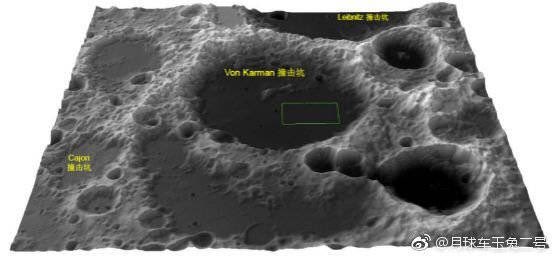
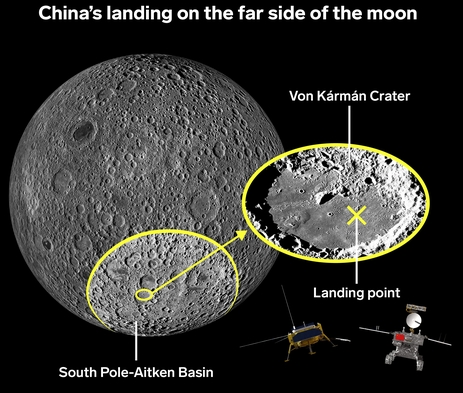
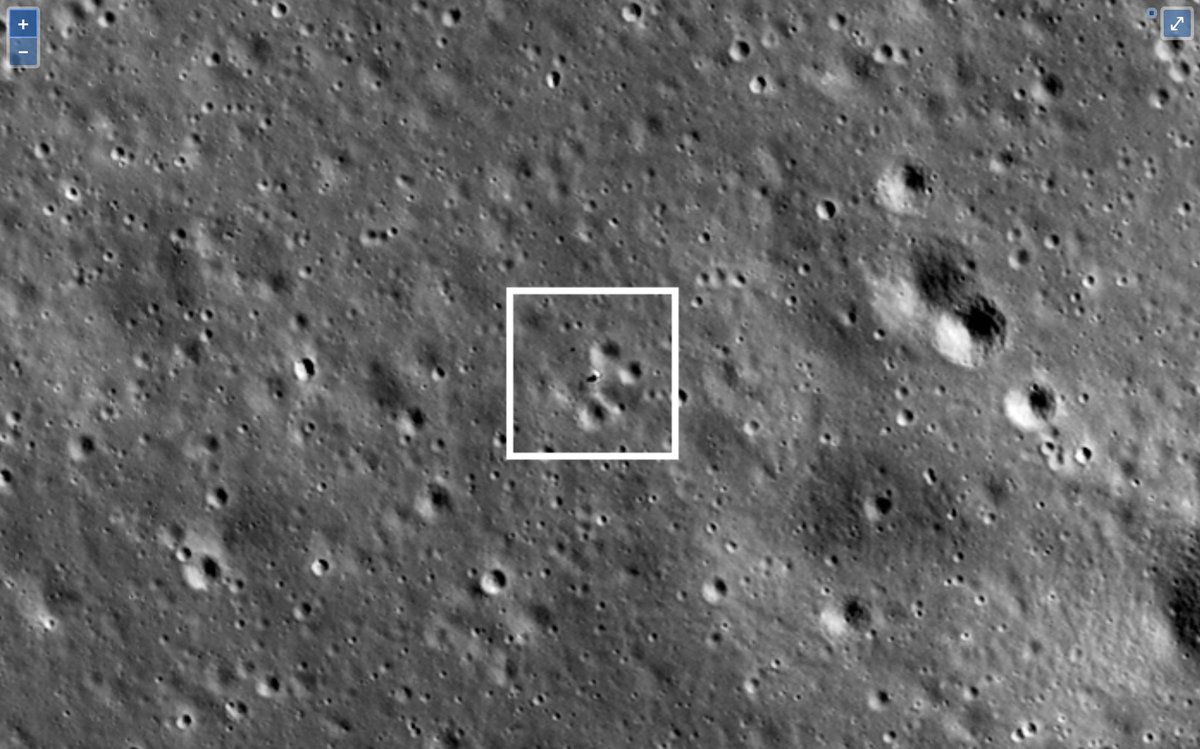
Photo topographique de la zone d'atterrissage dans la poche du cratère de l'autre côté de la lune du module de descente de Chang'e-4 (réalisée par la sonde LRO, NASA):
 Nouvelles photos de la surface lunaire des caméras du module d'atterrissage Chang'e-4 et du rover Yutu-2.
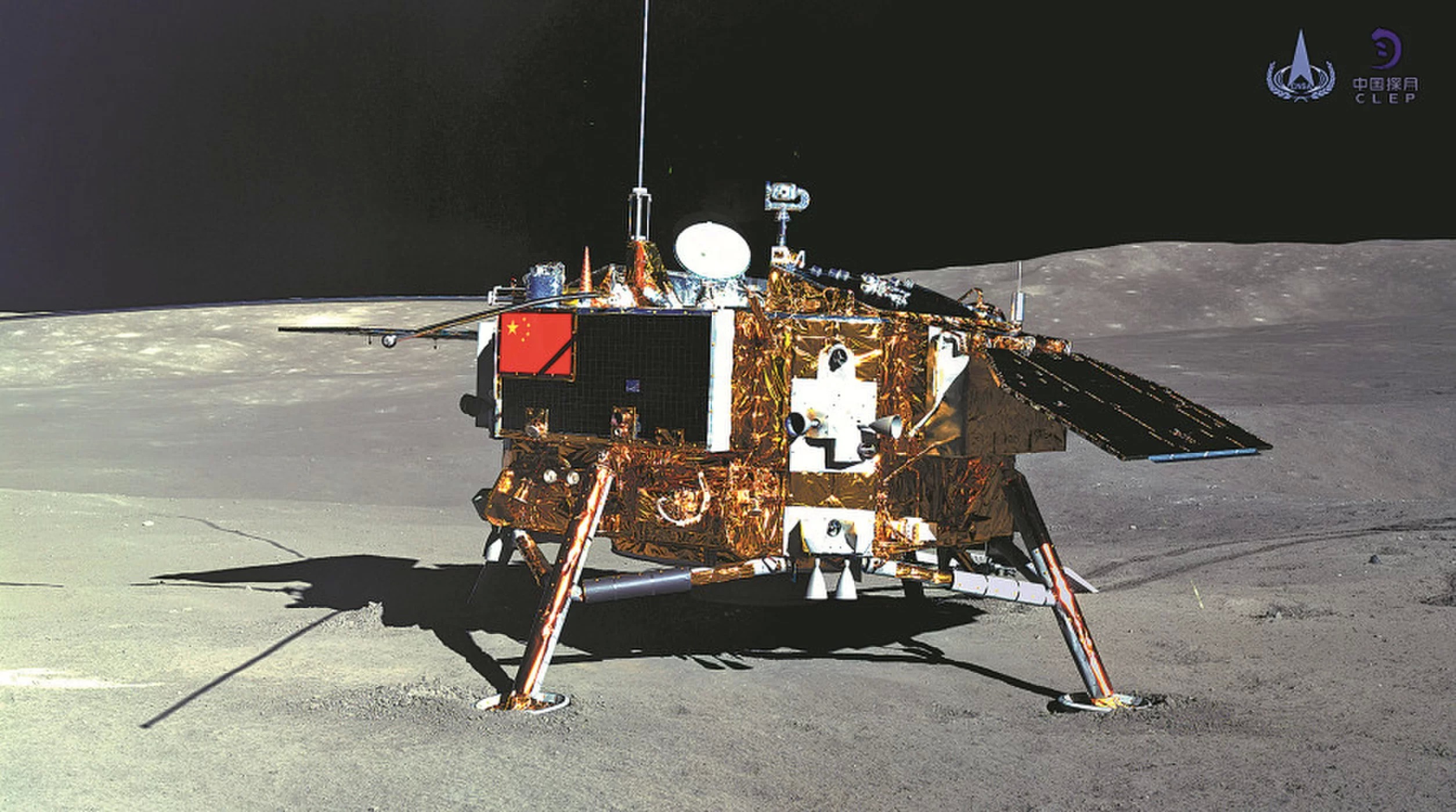
Nouvelles photos de la surface lunaire des caméras du module d'atterrissage Chang'e-4 et du rover Yutu-2.Le module d'atterrissage très solitaire de Chang'e-4:

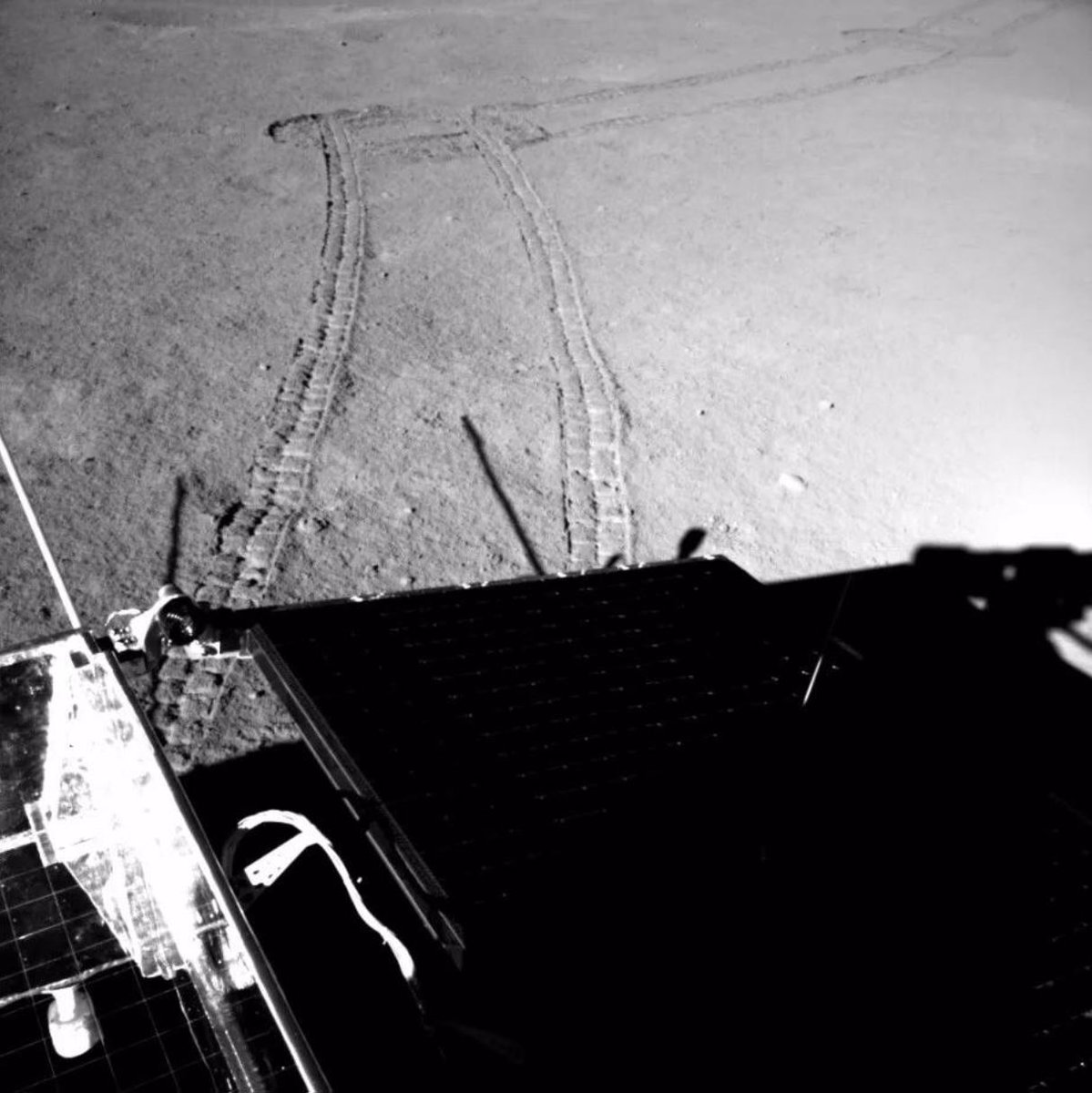
Traces du rover Yutu-2.:

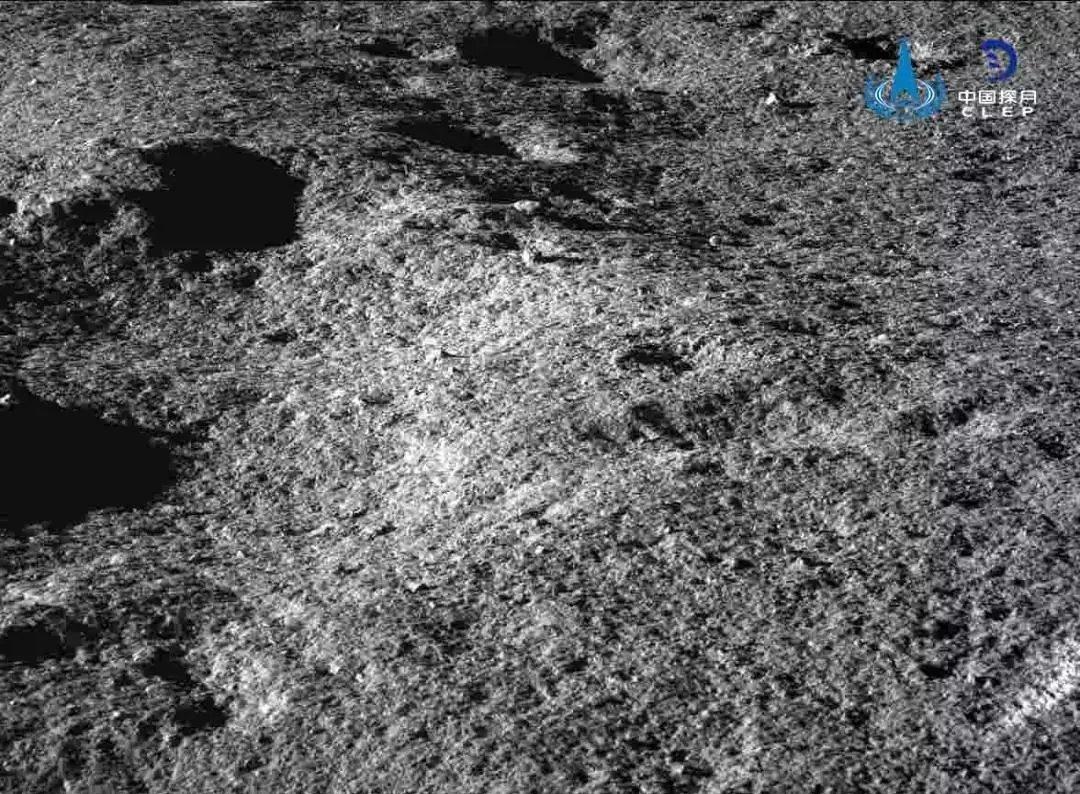
La surface du dos de la lune:



 Envoyé précédemment à la Terre des photographies de la surface du fond de la lune:
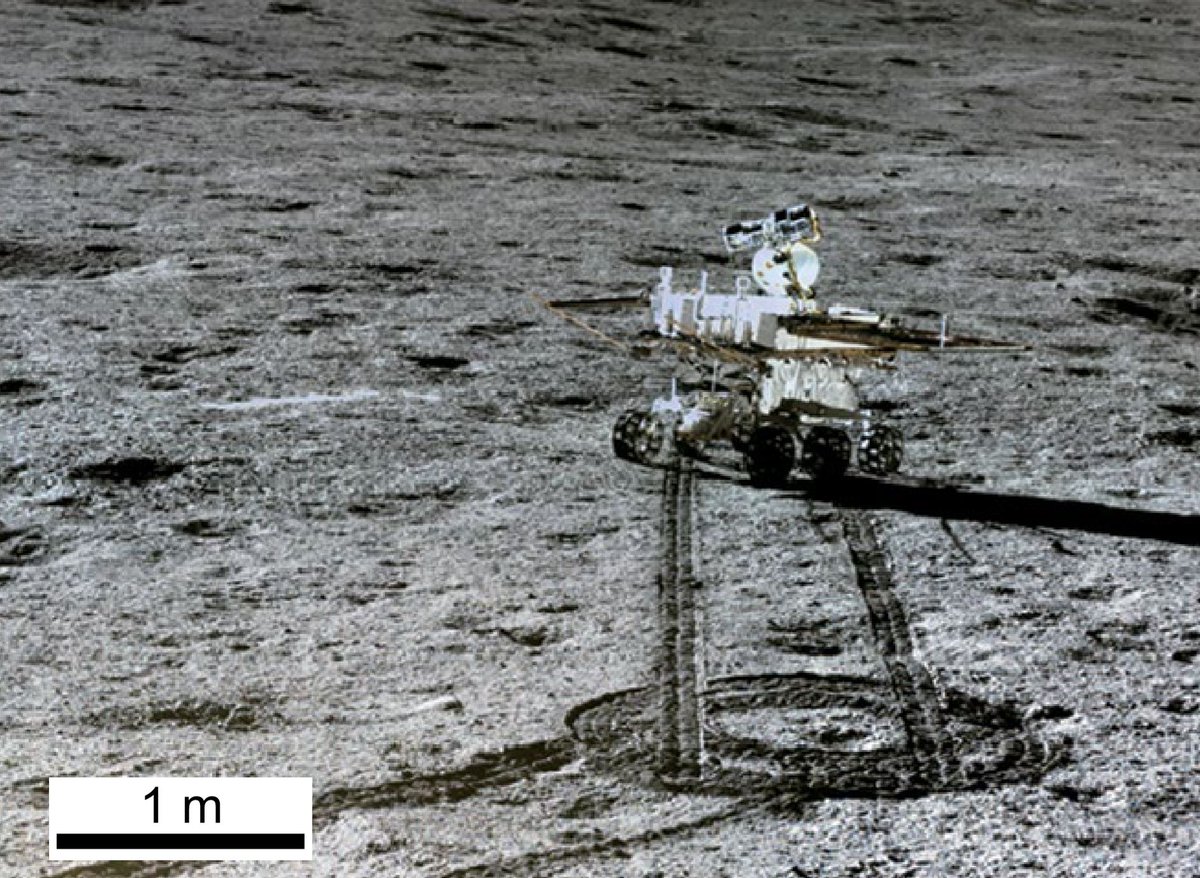
Envoyé précédemment à la Terre des photographies de la surface du fond de la lune:La lune sur les roues du rover Yutu-2 et l'ombre de l'antenne et de la plate-forme avec une caméra panoramique:

Plusieurs cratères (avec de belles ombres) et des montagnes en arrière-plan:

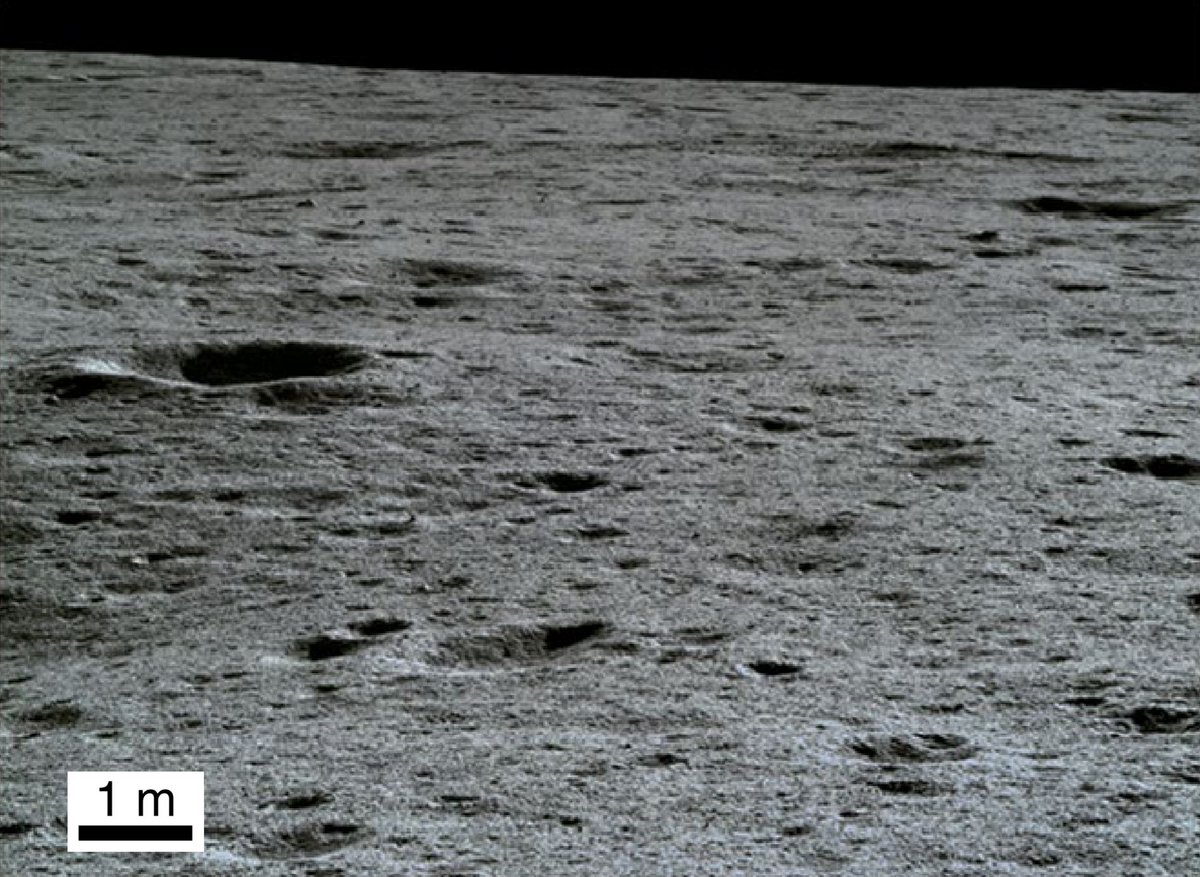
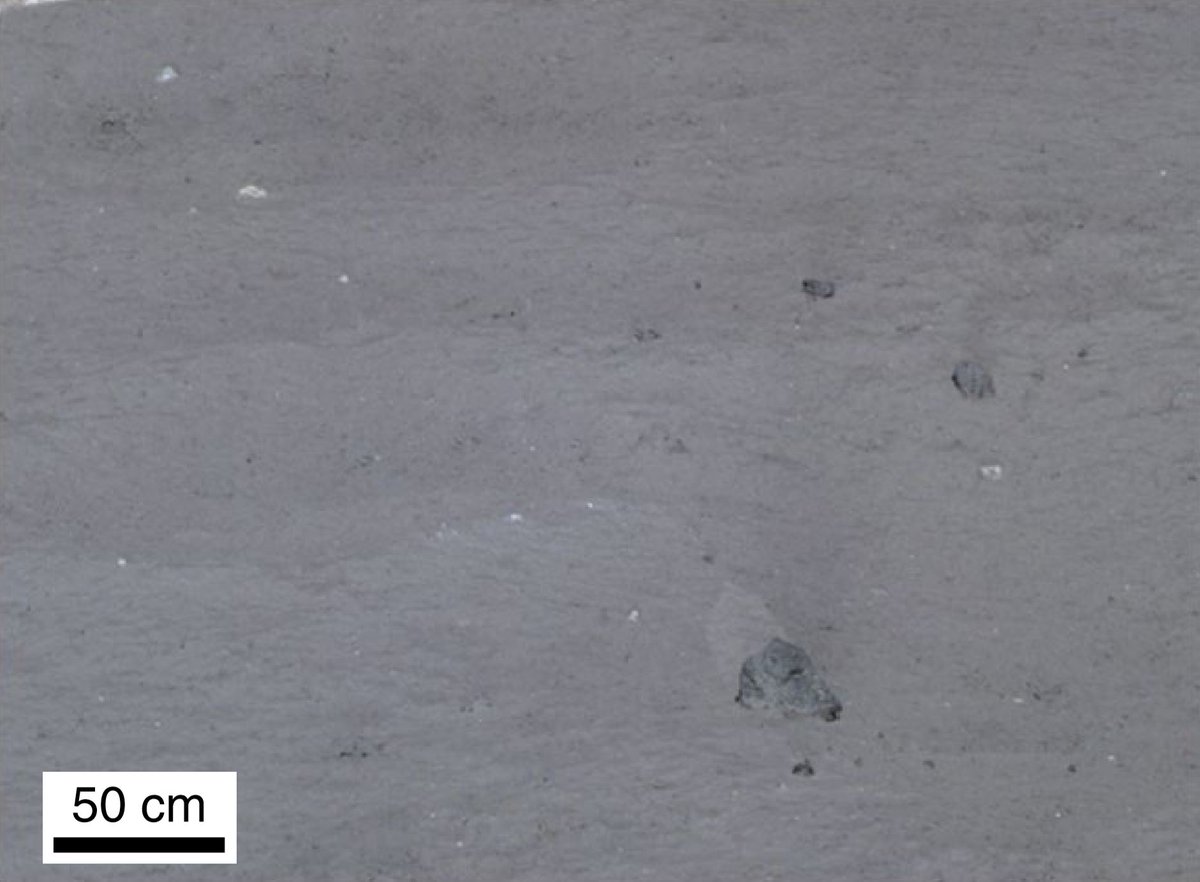
Et ce sont des photos de l'article scientifique «Lunaire au loin à explorer par Chang'e-4» du numéro d'avril de Nature Geoscience.

Petits cratères près du site d'atterrissage:
Le rover "Yutu-2" explore la surface de la lune:
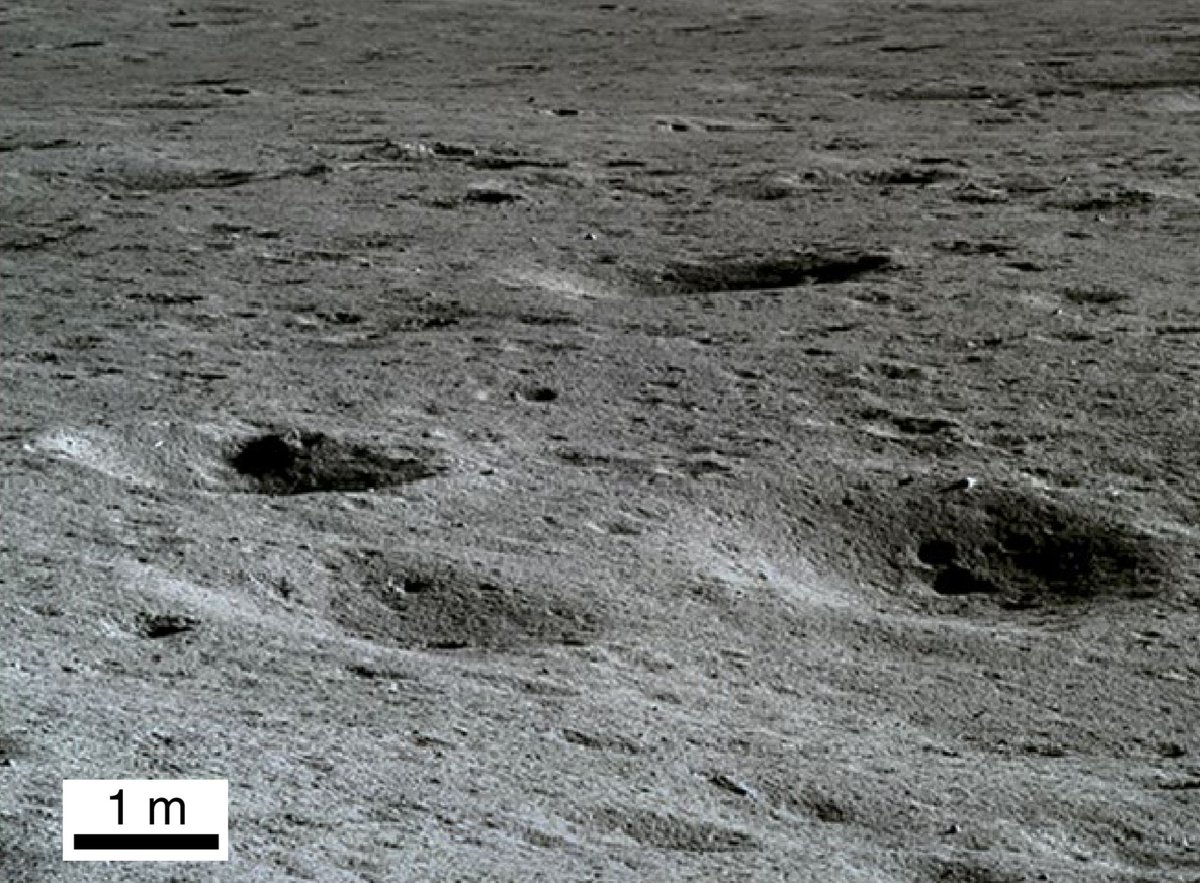
Fragments de pierres dans de petits cratères (photo du rover Yutu-2):
Petites pierres le long du rover Yutu-2:

Pierres sombres très inhabituelles près du site d'atterrissage:
 Photos des caméras:
Photos des caméras:Caméra d'atterrissage LCAM: Caméra panoramique PCAM (rover): De nouveaux moments dans l'histoire du projet Chang'e-48 décembre 2018: Le lanceur Changzheng-3B avec charge utile (station Chang'e-4) a été lancé avec succès depuis le port spatial chinois de Sichan.
Lancement du lanceur Changzheng-3B:



Fin du compte à rebours:






Département charge utile:

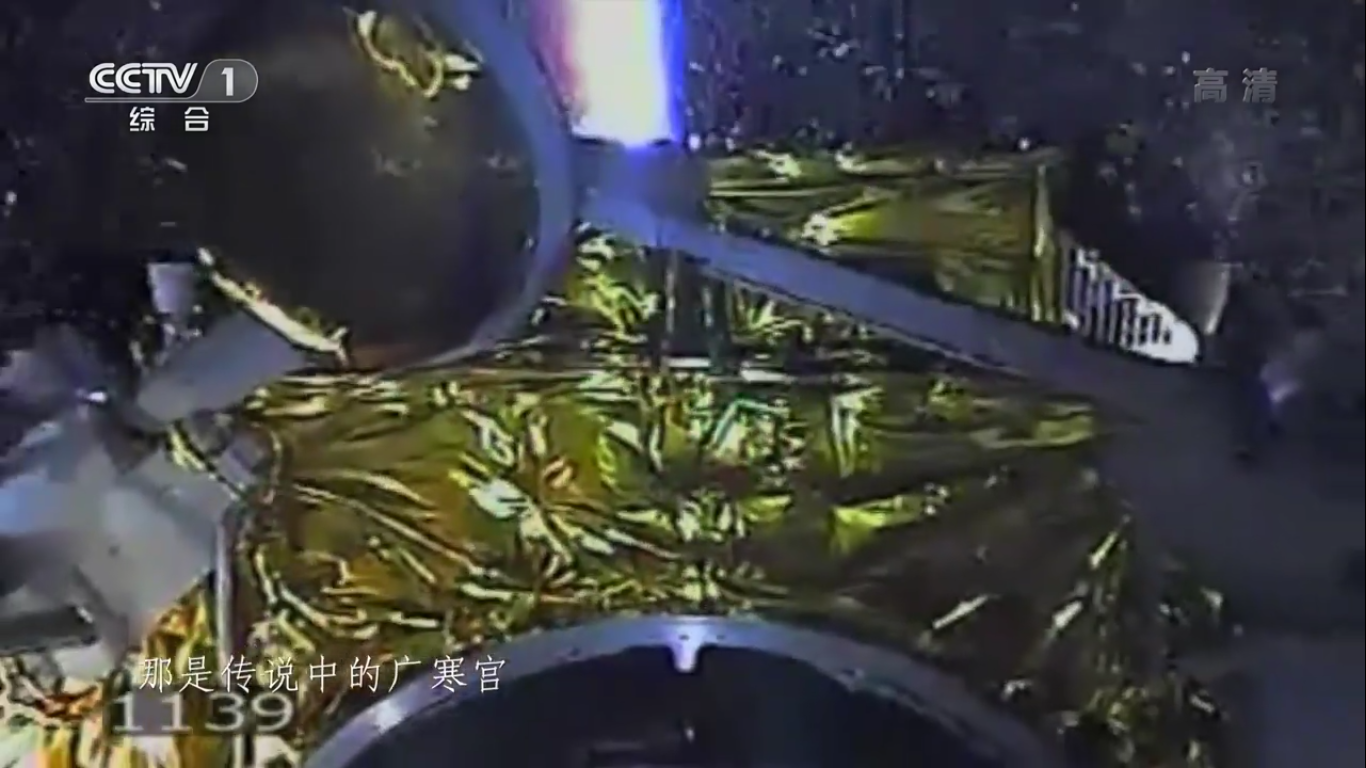
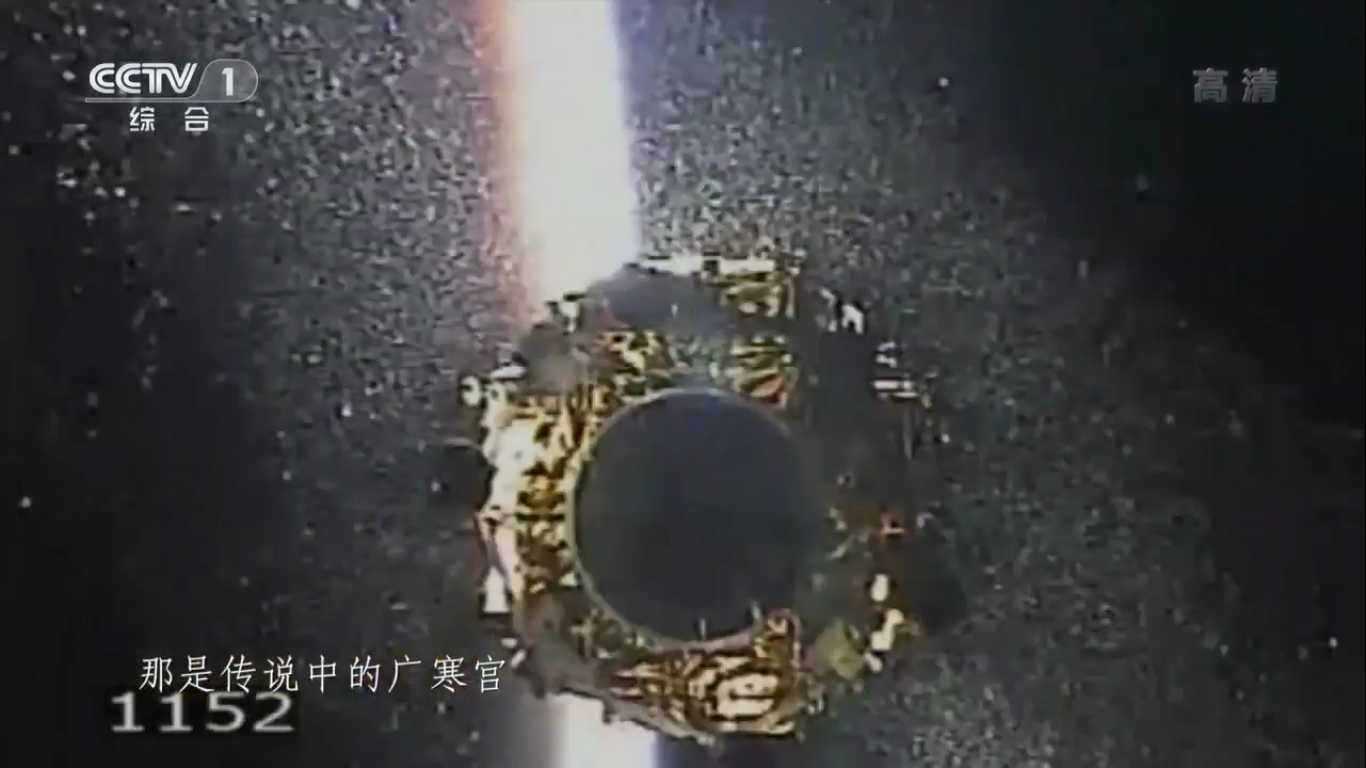

Positionnement de la charge utile déjà dans l'espace:

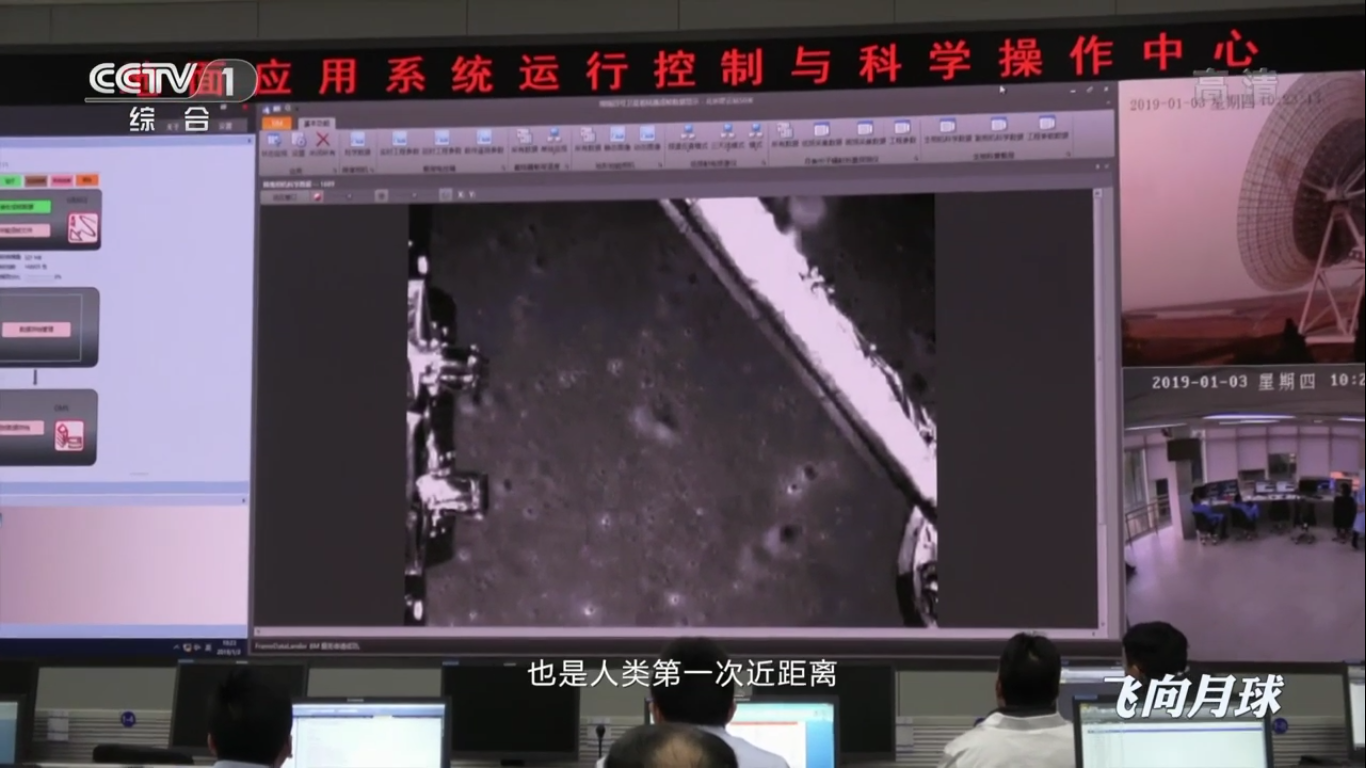
3 janvier 2019: l'atterrisseur Chang'e-4 atterrit dans le cratère Karman de l'autre côté de la lune.

Au centre de contrôle de vol de l'Académie chinoise des technologies spatiales:



Zhang He - Directeur exécutif du projet Chang'e-4 dans son poste:

Icônes intéressantes:




Au centre des communications spatiales:

Préparation à l'atterrissage:
Le site d'atterrissage "doit attraper" très attentivement:




Certains opérateurs n'ont pas de clavier:


Processus d'atterrissage:

Communication par relais satellite:


Il y a un palier:



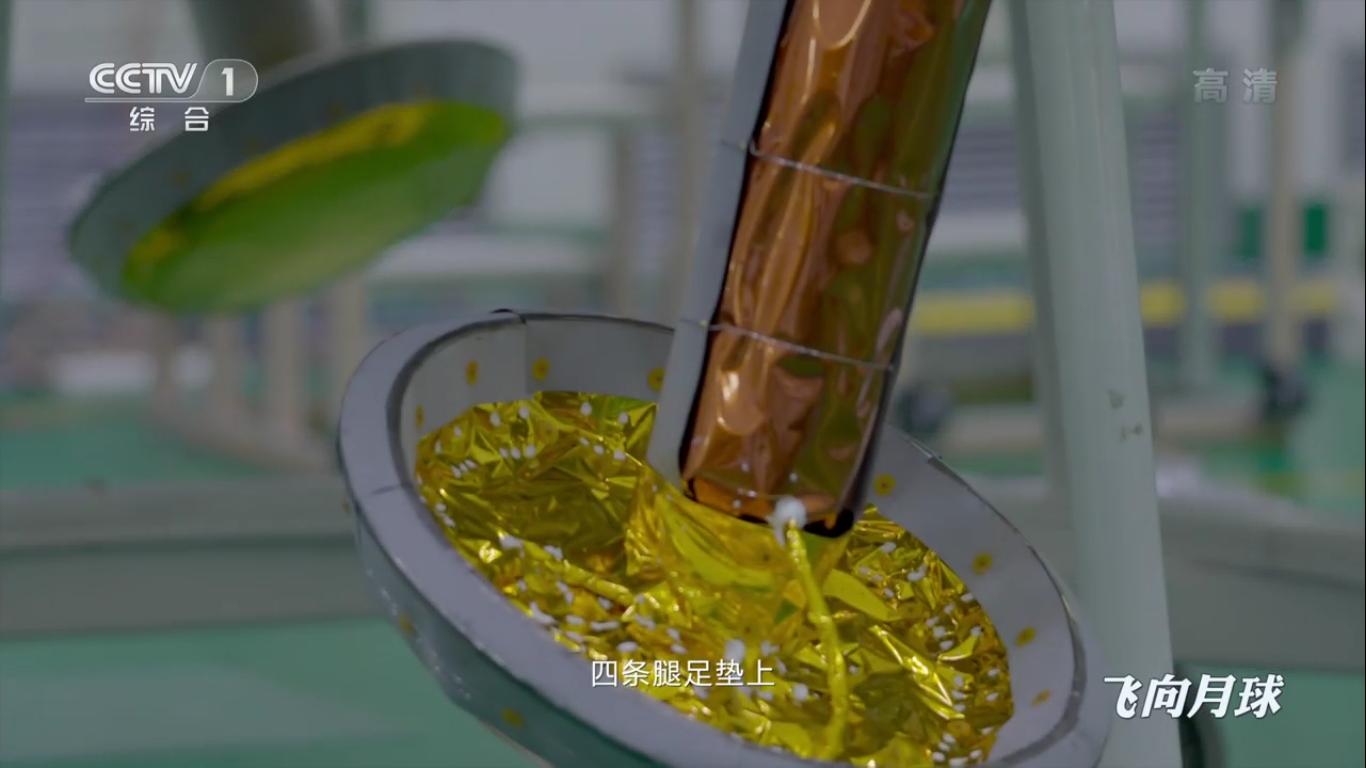
Préparation au lancement du rover:


Chaque support d'atterrissage du module de descente Chang'e-4 a un capteur tactile de surface et des capteurs de température qui fonctionnent la nuit au clair de lune, enregistrant des données sur la surface de la lune, sont également intégrés dans les supports et la rampe de lancement du rover.
Selon les capteurs des modules Chang'e-4, la température sur la surface lunaire la nuit a chuté (minimum) à moins 190 degrés Celsius.




Réception et traitement des données dans un centre de communications spatiales:

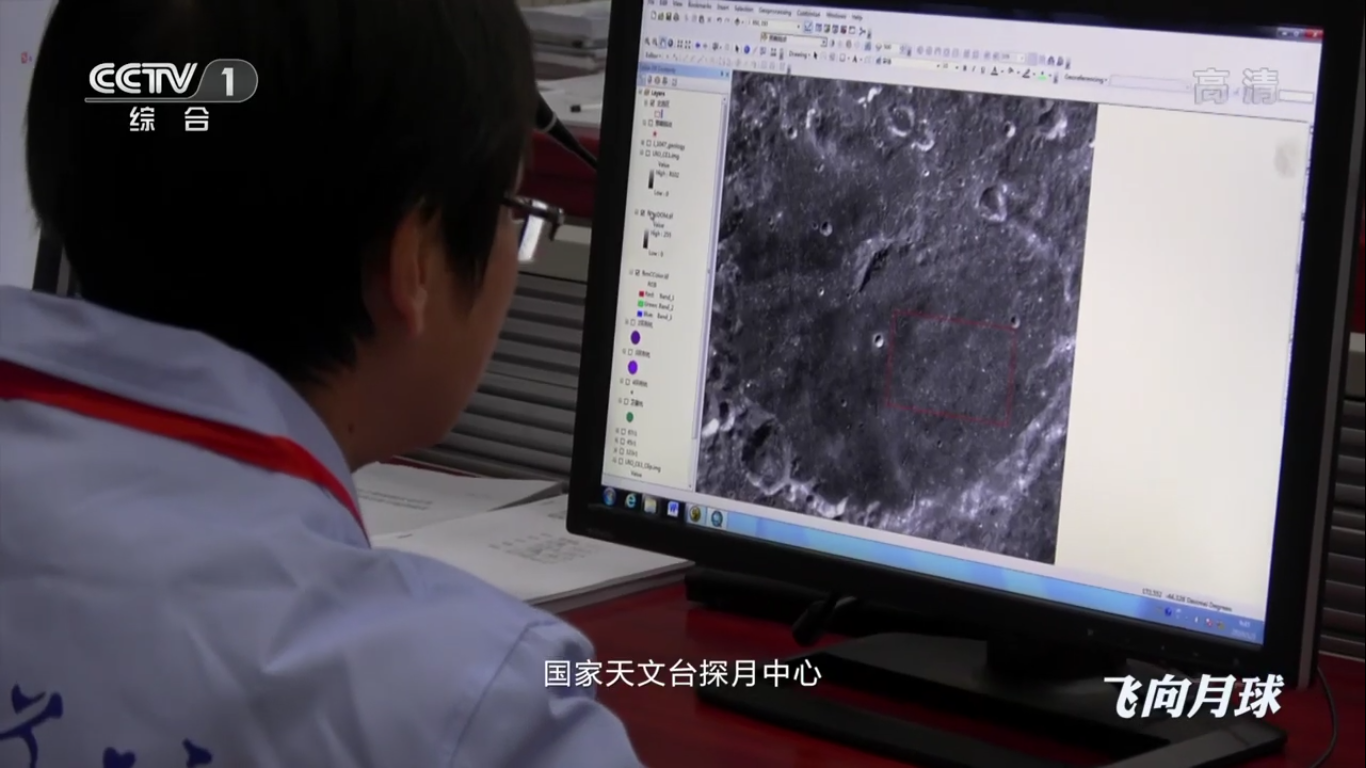
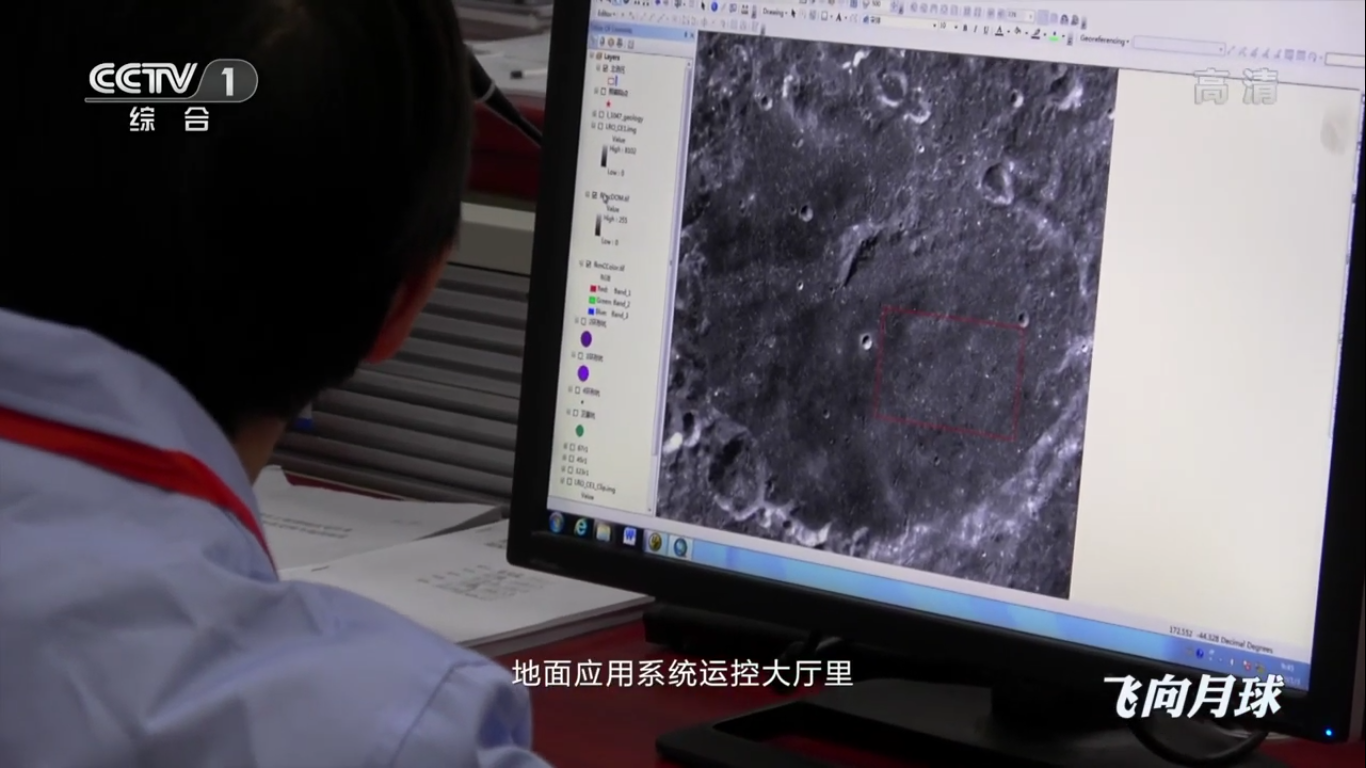
Les opérateurs de rover Yutu-2 s'appuient sur leurs cartes de surface virtuelles:

Photos du site d'atterrissage des modules Chang'e-4 réalisées
par la sonde LRO en orbite lunaire (NASA) :
À l'aide d'un radar spécial (dont la partie extérieure est composée de deux antennes-antennes et d'une antenne plate sous le fond), dont les rayons pénètrent à la surface de la lune (LPR - Lunar Penetrating Radar), le rover Yutu-2 crée une carte tridimensionnelle de la partie souterraine de la surface lunaire:
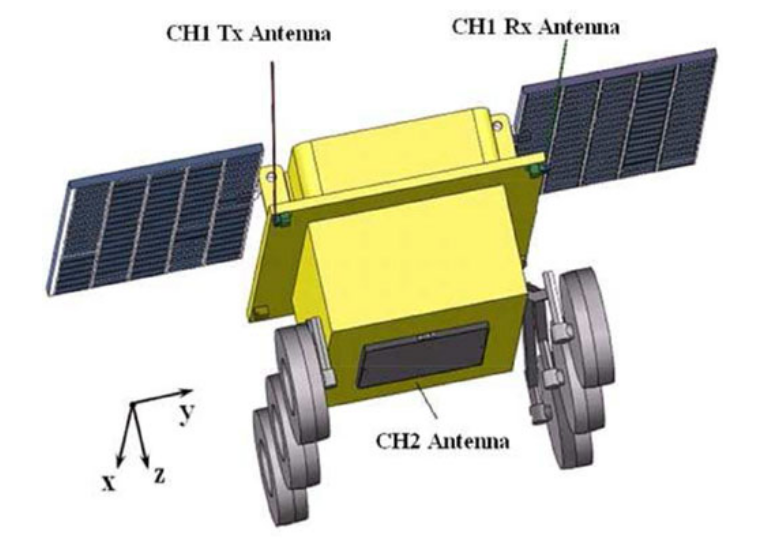
 Caractéristiques du radar lunaire pénétrant (LPR):
Caractéristiques du radar lunaire pénétrant (LPR):Canal 1:
- Tension de l'émetteur - 1000 V (erreur <5%)
- Fréquence d'impulsion de l'émetteur - 0,5, 1, 2 kHz
- Heure d'arrivée d'impulsion de l'émetteur - <= 5 ns
- Fréquence du récepteur - 10-175 MHz
- Plage dynamique d'entrée du récepteur -> 90 dB
- Fréquence centrale de l'antenne - 60 MHz
- Bande passante d'antenne -> = 40 MHz
- Fonction d'onde stationnaire - <= 3
- Profondeur de détection maximale -> = 100 m
- Résolution en profondeur - 1 m
Canal 2:
- Tension de l'émetteur -> = 400 V (erreur <5%)
- Fréquence d'impulsion de l'émetteur - 5, 10, 20 kHz
- Heure d'arrivée d'impulsion de l'émetteur - <= 1 ns
- Fréquence du récepteur - 10-1000 MHz
- Plage dynamique d'entrée du récepteur -> 90 dB
- Fréquence centrale de l'antenne - 500 MHz
- Bande passante d'antenne -> = 450 MHz
- Fonction d'onde stationnaire - <= 2,5
- Profondeur de détection maximale -> = 30 m
- Résolution en profondeur - <= 30 cm
Le radar lunaire pénétrant (LPR) installé sur le rover Yutu-2 est similaire dans son appareil au radar installé sur le premier rover Yutu de la mission Chang'e-3.
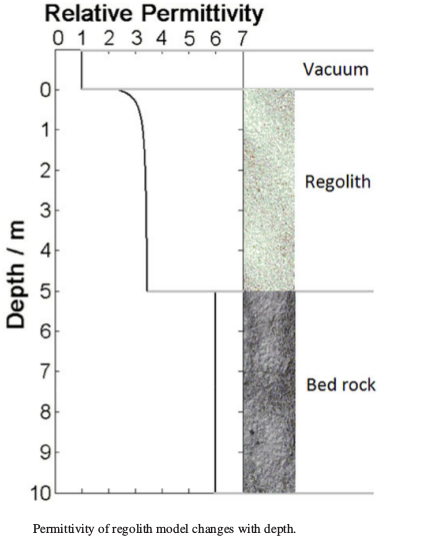
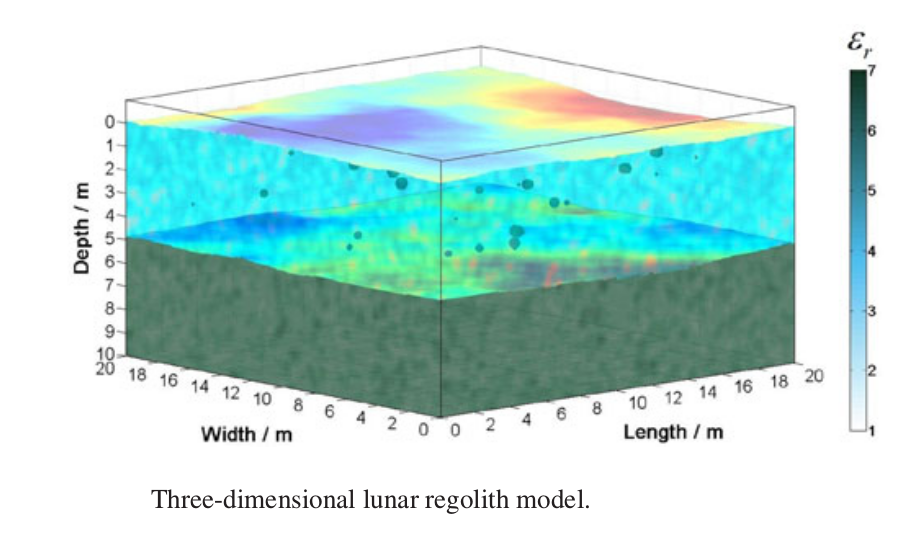
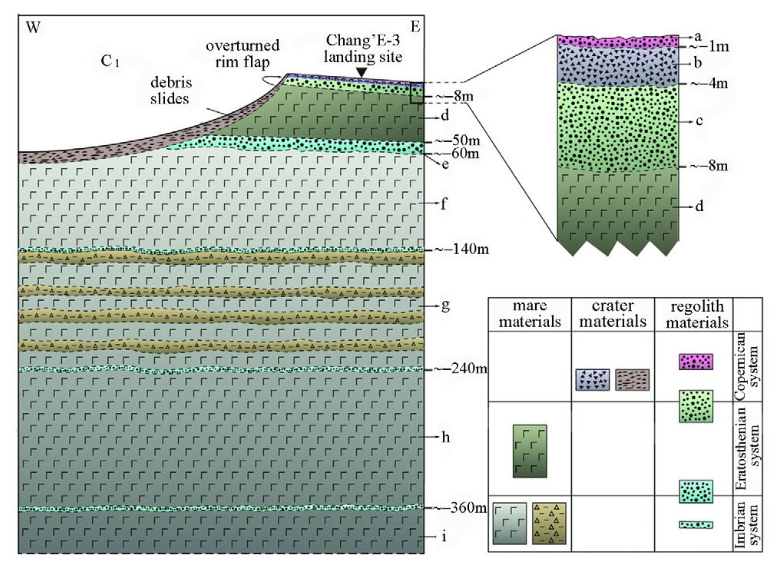
Les données reçues du radar LPR sont analysées et résumées dans des graphiques sur lesquels vous pouvez suivre la composition géologique et les caractéristiques de la surface lunaire dans la zone d'atterrissage:
Les scientifiques et les ingénieurs du centre de contrôle de vol de l'Académie chinoise des technologies spatiales tentent de maximiser l'heure du cinquième jour lunaire (deux semaines terrestres) pour effectuer des recherches et obtenir des données à partir des appareils du module d'atterrissage Chang'e-4 et du rover Yutu-2.
Vous pouvez en savoir plus sur l'équipement scientifique du module d'atterrissage Chang'e-4 et du rover Yutu-2 ici:
La mission Chang'e 4 est le troisième jour lunaire. Rover "Yutu-2" à la recherche de ... pierresMission Chang'e-4 - équipement scientifique sur le module d'atterrissage et le satellite répéteurSoit dit en passant, le 24 avril 2019 (la journée de la cosmonautique chinoise), un concours d'art pour enfants organisé par la Chinese Aerospace Society dédié à la conquête de l'espace et de la lune s'est tenu.
Le travail des enfants est formidable.
Guo Zhicheng - Explorer l'univers dans le futur
Han Jiaxin - Nous sommes allés dans l'espace
Dan Xianue - Un jardin au-delà de l'univers
Tien Xian - Station spatiale du futur

Zheng Yufeng - Coloration de l'espace ensemble

Fang Yongxin - Station de conversion d'énergie

Li Mengyin - Le système solaire mondial

Xu Zhiyun - Chercheurs

Yang Haowan - Base spatiale

Yang Jinru - Vacuum City

Zhuo Xiyuan - Un vaisseau spatial flottant

Zhou Inyo- Mora No.1451

J'ai particulièrement aimé ces œuvres:
Wei Wei - Mon cœur est plein d'étoiles

Dai Chiayi - Rêver de l'espace

Liu Ruiyang - Ma musique dans l'espace
