Vision par ordinateur. Maintenant, ils en parlent beaucoup, où il est appliqué et mis en œuvre beaucoup. Et il y a quelque temps, il n'y avait pas d'articles de synthèse sur Habré sur CV, avec des exemples d'architectures et de tâches modernes. Mais il y en a beaucoup et ils sont vraiment cool! Si vous êtes intéressé par ce qui se passe actuellement en vision par ordinateur, non seulement du point de vue de la
recherche et des articles , mais aussi du point de vue des problèmes appliqués, vous êtes les bienvenus chez cat. De plus, l'article peut être une bonne introduction pour ceux qui ont longtemps voulu commencer à comprendre tout cela, mais quelque chose était sur le chemin;)

Aujourd'hui, au PhysTech, il y a une collaboration active de l '"Académie" et des partenaires industriels. En particulier, il existe de nombreux
laboratoires intéressants de sociétés telles que Sberbank, Biocad, 1C, Tinkoff, MTS, Huawei à la
PhysTech School of Applied Mathematics and Computer Science .
J'ai été inspiré pour écrire cet article en travaillant dans le laboratoire des
systèmes intelligents hybrides , ouvert par
VkusVill . Le laboratoire a une tâche ambitieuse: construire un magasin qui fonctionne sans caisses, principalement à l'aide de la vision par ordinateur. Pendant près d'un an de travail, j'ai eu l'occasion de travailler sur de nombreuses tâches de vision, qui seront discutées dans ces deux parties.
Acheter sans caisses? Quelque part, je l'ai déjà entendu ..Cher lecteur, vous avez probablement pensé à
Amazon Go . Dans un sens, la tâche consiste à répéter leur succès, mais notre décision est plus sur la mise en œuvre que sur la construction d'un tel magasin à partir de zéro pour
beaucoup d'argent .
Nous nous déplacerons selon le plan:
- La motivation et ce qui se passe
- La classification comme mode de vie
- Architectures de réseaux de neurones convolutifs: 1000 façons d'atteindre un objectif
- Visualisation des réseaux de neurones convolutionnels: montrez-moi la passion
- Je suis moi-même une sorte de chirurgien: on extrait les traits des réseaux de neurones
- Restez proches: l'apprentissage de la représentation pour les personnes et les individus
- Partie 2:
détecter, évaluer la posture et reconnaître les actions sans spoilers
La motivation et ce qui se passe
À qui s'adresse l'article?L'article se concentre davantage sur les personnes qui connaissent déjà l'apprentissage automatique et les réseaux de neurones. Cependant, je vous conseille de lire au moins les deux premières sections - du coup tout sera clair :)
En 2019, tout le monde parle d'intelligence artificielle, de la
quatrième révolution industrielle et de l'
approche de l'humanité à une singularité . Cool, cool, mais je veux des détails. Après tout, nous sommes des techniciens curieux qui ne croient pas aux contes de fées sur l'IA, nous croyons au cadre formel des tâches, des mathématiques et de la programmation. Dans cet article, nous parlerons de cas spécifiques d'utilisation de l'IA très moderne - l'utilisation de l'apprentissage en profondeur (à savoir, les réseaux de neurones convolutionnels) dans une variété de tâches de vision par ordinateur.
Oui, nous parlerons spécifiquement des grilles, en mentionnant parfois quelques idées d'un point de vue "classique" (nous appellerons l'ensemble des méthodes en vision qui étaient utilisées avant les réseaux de neurones, mais cela ne signifie nullement qu'elles ne sont pas utilisées maintenant).
À mon avis, la première application vraiment intéressante des réseaux de neurones en vision, qui a été couverte dans les médias en 1993, est la
reconnaissance de l'écriture manuscrite par Jan LeCun . Maintenant, il est l'un des principaux IA de
Facebook AI Research , leur équipe a déjà publié
beaucoup de choses utiles en Open Source .
Aujourd'hui, la vision est utilisée dans de nombreux domaines. Je ne donnerai que quelques exemples frappants:
Véhicules sans pilote Tesla et YandexAnalyse d'imagerie médicale et prédiction du cancerConsoles de jeu: Kinect 2.0 (bien qu'il utilise également des informations de profondeur, c'est-à-dire des images RGB-D)Reconnaissance faciale : Apple FaceID (utilisant plusieurs capteurs)Cote du visage: masques SnapchatBiométrie des mouvements du visage et des yeux (exemple du projet FPMI MIPT )Recherche par image: Yandex et GoogleReconnaissance du texte dans l'image ( reconnaissance optique des caractères )Drones et robots: recevoir et traiter des informations par la visionOdométrie : création d'une carte et planification lors du déplacement de robotsAmélioration des graphismes et des textures dans les jeux vidéoTraduction d'images: Yandex et GoogleRéalité augmentée: Leap Motion (Project North Star) et Microsoft HololensTransfert de style et de texture: Prisma , PicsArtSans oublier les nombreuses applications dans diverses tâches internes des entreprises. Facebook, par exemple, utilise également la vision pour filtrer le contenu multimédia. Les méthodes de vision par ordinateur sont également utilisées
dans les tests de qualité / dommages dans l'industrie .
En fait, la réalité augmentée doit faire l'objet d'une attention particulière, car
elle ne fonctionne pas dans un avenir proche, cela peut devenir l'un des principaux domaines d'application de la vision.
Motivé. Chargé. C'est parti:
La classification comme mode de vie

Comme je l'ai dit, dans les années 90, les filets ont été tirés à vue. Et ils ont tourné dans une tâche spécifique - la tâche de classer les images de nombres manuscrits (le célèbre
ensemble de données MNIST ). Historiquement, c'était la tâche de classer les images qui était devenue la base pour résoudre presque toutes les tâches ultérieures en vision. Prenons un exemple spécifique:
Tâche : Un dossier avec des photos est donné à l'entrée, chaque photo a un objet particulier: soit un chat, soit un chien, soit une personne (même s'il n'y a pas de photos "poubelles", c'est une tâche super-non vitale, mais il faut commencer quelque part). Vous devez décomposer les images dans trois dossiers:
/cats ,
/dogs et
/leather_bags/humans , en ne plaçant que des photos avec les objets correspondants dans chaque dossier.
Qu'est-ce qu'une image / photo?
Presque partout dans la vision, il est habituel de travailler avec des images au format RVB. Chaque image a une hauteur (H), une largeur (W) et une profondeur de 3 (couleurs). Ainsi, une image peut être représentée comme un tenseur de dimension HxWx3 (chaque pixel est un ensemble de trois nombres - valeurs d'intensité dans les canaux).
Imaginez que nous ne connaissions pas encore la vision par ordinateur, mais nous connaissons l'apprentissage automatique. Les images sont simplement des tenseurs numériques dans la mémoire de l'ordinateur. Nous formalisons le problème en termes d'apprentissage automatique: les objets sont des images, leurs signes sont des valeurs en pixels, la réponse pour chacun des objets est une étiquette de classe (chat, chien ou personne). Il s'agit d'une pure
tâche de classification .
Vous pouvez prendre certaines méthodes de la vue «classique» ou de l'apprentissage automatique «classique», c'est-à-dire pas d'un réseau de neurones. Fondamentalement, ces méthodes consistent à mettre en évidence sur les images de certaines fonctionnalités (points spéciaux) ou des régions locales qui caractériseront l'image («
sac de mots visuels »). Habituellement, tout se résume à quelque chose comme
SVM sur
HOG /
SIFT .
Mais nous nous sommes réunis ici pour parler des réseaux de neurones, donc nous ne voulons pas utiliser les signes que nous avons inventés, mais voulons que le réseau fasse tout pour nous. Notre classificateur prendra les signes d'un objet en entrée et renverra une prédiction (étiquette de classe). Ici, les valeurs d'intensité en pixels agissent comme des signes (voir le modèle d'image dans
spoiler ci-dessus). N'oubliez pas qu'une image est un tenseur de taille (Hauteur, Largeur, 3) (s'il s'agit de couleur). Lorsque vous apprenez à entrer dans la grille, tout cela n'est généralement pas servi par une image et non par un ensemble de données entier, mais par lots, c'est-à-dire dans de petites portions d'objets (par exemple, 64 images dans le lot).
Ainsi, le réseau reçoit un tenseur d'entrée de taille (BATCH_SIZE, H, W, 3). Vous pouvez «agrandir» chaque image dans une ligne vectorielle de nombres H * W * 3 et travailler avec les valeurs en pixels comme avec les signes dans l'apprentissage automatique, un
Perceptron multicouche (MLP) normal ferait exactement cela, mais honnêtement, c'est comme ça ligne de base, car travailler avec des pixels comme une ligne vectorielle ne prend pas en compte, par exemple, l'invariance translationnelle des objets dans l'image. Le même chat peut être au milieu de la photo et dans le coin, MLP n'apprendra pas ce schéma.
Vous avez donc besoin de quelque chose de plus intelligent, par exemple, une opération de convolution. Et cela concerne la vision moderne,
les réseaux de neurones convolutifs :
Le code de formation du réseau de convolution peut ressembler à ceci (sur le framework PyTorch) Puisque nous parlons maintenant de
formation avec un enseignant , nous avons besoin de plusieurs composants pour former un réseau de neurones:
- Données (existe déjà)
- Architecture de réseau (mise en évidence)
- Une fonction de perte qui dira comment le réseau neuronal apprendra (ici ce sera l' entropie croisée )
- Méthode d'optimisation (changera le poids du réseau dans la bonne direction)
- Définir l'architecture et les hyperparamètres de l'optimiseur (par exemple, la taille des pas de l'optimiseur, le nombre de neurones dans les couches, les coefficients de régularisation)
C'est exactement ce qui est implémenté dans le code; le réseau neuronal convolutionnel lui-même est décrit dans la classe Net ().
Si vous voulez apprendre lentement et dès le début sur les faisceaux et les réseaux de convolution, je recommande une
conférence à la Deep Learning School (MIPT MIPT) (en russe) sur ce sujet et, bien sûr,
le cours de Stanford cs231n (en anglais) .
En bref, l'opération de convolution vous permet de trouver des motifs sur des images en fonction de leur variabilité. Lorsque nous formons des réseaux de neurones à convolution (eng: Réseaux de neurones à convolution), nous trouvons en fait des filtres de convolution (poids des neurones) qui décrivent bien les images, et si bien que nous pouvons déterminer avec précision la classe à partir d'eux. De nombreuses façons ont été inventées pour construire un tel réseau. Plus que vous ne le pensez ...
Architectures de réseaux de neurones convolutifs: 1000 façons d'atteindre un objectif
Oui, oui,
une autre revue architecturale . Mais ici, je vais essayer de le rendre aussi pertinent que possible!
Il y a d'abord eu
LeNet , il a aidé Jan LeCun à reconnaître les nombres en 1998. Ce fut le premier réseau neuronal convolutif pour la classification. Sa principale caractéristique était qu'elle commençait essentiellement à utiliser
des opérations de
convolution et de mise en commun .

Ensuite, il y a eu une pause dans le développement des grilles, mais le matériel ne s'est pas arrêté; des calculs efficaces sur GPU et
XLA ont été développés . En 2012, AlexNet est apparue, elle a participé au concours ILSVRC (
ImageNet Large-Scale Visual Recognition Challenge ).
Une petite digression sur ILSVRCImageNet a été assemblé en 2012, et un sous-ensemble de milliers d'images et de 1000 classes a été utilisé pour le concours ILSVRC. ImageNet compte actuellement environ 14 millions de photos et 21 841 classes (prises sur le site officiel), mais pour la compétition, elles ne sélectionnent généralement qu'un sous-ensemble. ILSVRC est alors devenu le plus grand concours annuel de classification d'images. Soit dit en passant, nous avons récemment compris comment
s'entraîner sur ImageNet en quelques minutes .
C'est sur ImageNet (en ILSVRC) de 2010 à 2018 qu'ils ont reçu les réseaux
SOTA dans la classification des images. Certes, depuis 2016, les concours de localisation, de détection et de compréhension de la scène, plutôt que de classification, sont plus pertinents.
En règle générale, diverses
revues d'architecture mettent en lumière celles qui ont été les premières à l'ILSVRC de 2010 à 2016 et sur certains réseaux individuels. Afin de ne pas encombrer l'histoire, je les ai placés sous le spoiler ci-dessous, en essayant de souligner les idées principales:
Architecture de 2012 à 2015 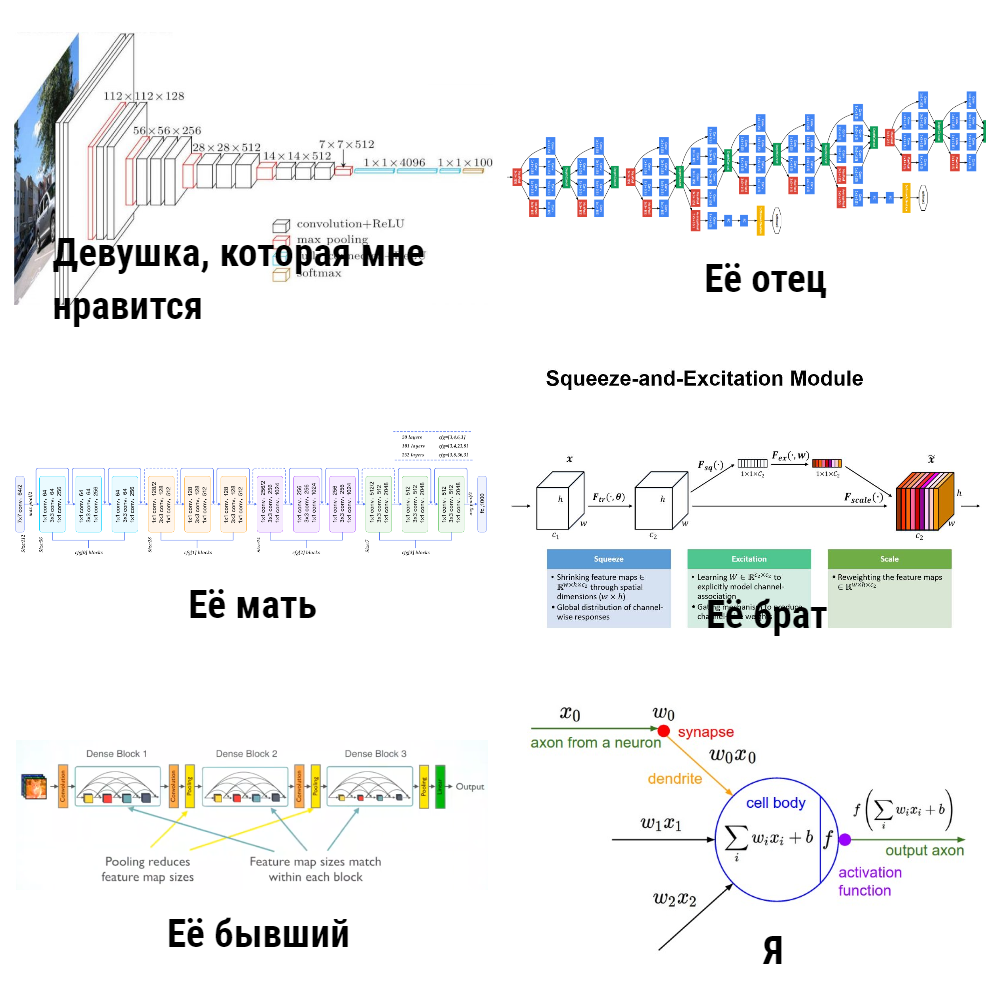
Les idées de toutes ces architectures (à l'exception de ZFNet, il est généralement peu mentionné) étaient à une époque un nouveau mot dans les réseaux de neurones pour la vision. Cependant, après 2015, il y a eu de nombreuses autres améliorations importantes, par exemple, Inception-ResNet, Xception, DenseNet, SENet. Ci-dessous, j'ai essayé de les rassembler en un seul endroit.
Architecture de 2015 à 2019 La plupart de ces modèles pour PyTorch peuvent être trouvés
ici , et il y a
une telle chose cool .
Vous avez peut-être remarqué que tout cela pèse beaucoup (je voudrais 20 Mo maximum, voire moins), alors qu'aujourd'hui ils utilisent des appareils mobiles partout et que l'
IoT gagne en popularité, ce qui signifie que vous souhaitez également utiliser des grilles là-bas.
Relation entre le poids et la vitesse du modèleÉtant donné que les réseaux de neurones en eux-mêmes ne multiplient que les tenseurs, le nombre d'opérations de multiplication (lire: le nombre de poids) affecte directement la vitesse de travail (si le post-traitement ou le prétraitement à forte intensité de main-d'œuvre n'est pas utilisé). La vitesse du réseau lui-même dépend de l'implémentation (framework), du matériel sur lequel il s'exécute et de la taille de l'image d'entrée.
Les auteurs de nombreux articles ont pris le chemin d'inventer des architectures rapides, j'ai rassemblé leurs méthodes sous le spoiler ci-dessous:
Architecture légère de CNN Les nombres dans toutes les tables
sont tirés du plafond des référentiels, de
la table Keras Applications et de
cet article .
Vous demandez: «Pourquoi avez-vous écrit sur tout ce« zoo »de modèles? Et pourquoi est la tâche de la classification? Mais nous voulons apprendre aux machines à voir, et la classification n'est qu'une sorte de tâche étroite. ». Le fait est que les réseaux de neurones pour détecter les objets, évaluer les postures / points, ré-identifier et rechercher dans une image utilisent exactement les modèles pour la classification en tant que
colonne vertébrale , et 80% du succès en dépend.
Mais je veux en quelque sorte faire davantage confiance à CNN, ou ils ont imaginé des boîtes noires, mais ce qui est "à l'intérieur" n'est pas évident. Pour mieux comprendre le mécanisme de fonctionnement des réseaux convolutifs, les chercheurs ont imaginé l'utilisation de la visualisation.
Visualisation des réseaux de neurones convolutionnels: montrez-moi la passion
Une étape importante vers la compréhension de ce qui se passe à l'intérieur des réseaux convolutionnels est l'article
«Visualiser et comprendre les réseaux convolutionnels» . Dans ce document, les auteurs ont proposé plusieurs façons de visualiser exactement à quoi (sur quelles parties de l'image) les neurones dans différentes couches CNN répondent (je recommande également de regarder
une conférence de Stanford sur ce sujet ). Les résultats étaient très impressionnants: les auteurs ont montré que les premières couches du réseau convolutionnel répondent à certaines «choses de bas niveau» par le type de bords / angles / lignes, et les dernières couches répondent déjà à des parties entières des images (voir l'image ci-dessous), c'est-à-dire qu'elles portent déjà en soi une sémantique.
De plus, le
projet de visualisation en profondeur de l'Université Cornell et de la société a avancé la visualisation encore plus loin, tandis que le
célèbre DeepDream a appris à déformer dans un style intéressant et
addictif (ci-dessous, une image de
deepdreamgenerator.com ).
En 2017, un
très bon article a été publié sur Distill , dans lequel ils ont effectué une analyse détaillée de ce que chaque couche «voit», et plus récemment (en mars 2019), Google a inventé
des atlas d'activation : des cartes uniques qui peuvent être construites pour chaque couche réseau, ce qui nous rapproche de la compréhension de l'image globale du travail de CNN.
Si vous voulez jouer avec la visualisation vous-même, je recommanderais
Lucid et
TensorSpace .
D'accord, CNN semble être vrai dans une certaine mesure. Nous devons apprendre à l'utiliser dans d'autres tâches, et pas seulement dans la classification. Cela nous aidera à extraire les images Embedding'ov et à transférer l'apprentissage.
Je suis moi-même une sorte de chirurgien: on extrait les traits des réseaux de neurones
Imaginez qu'il y ait une image, et nous voulons trouver celles qui lui ressemblent visuellement (c'est, par exemple, la recherche dans une image dans Yandex.Pictures). Auparavant (avant les réseaux de neurones), les ingénieurs extrayaient manuellement des fonctionnalités pour cela, par exemple, inventant quelque chose qui décrit bien l'image et permet de la comparer avec d'autres. Fondamentalement, ces méthodes (
HOG ,
SIFT ) fonctionnent avec
des dégradés d'image , généralement ces choses sont appelées descripteurs d'image «classiques». D'un intérêt particulier, je me réfère à l'
article et au
cours d'Anton Konushin (ce n'est pas de la publicité, juste un bon cours :)
En utilisant des réseaux de neurones, nous ne pouvons pas inventer nous-mêmes ces caractéristiques et ces heuristiques, mais former correctement le modèle, puis
prendre la sortie d'une ou plusieurs couches du réseau comme signes de l'image .
Un examen plus approfondi de toutes les architectures montre clairement qu'il y a deux étapes de classification dans CNN:
1). Couches d'extraction de fonctionnalités pour extraire des fonctionnalités informatives à partir d'images à l'aide de couches convolutionnelles
2). Apprendre en plus de ces fonctionnalités Couches de classificateur
entièrement connectées (FC)L'incorporation d'images (fonctionnalités) est à peu près le fait que vous pouvez prendre leurs signes après l'extracteur de fonctionnalités d'un réseau de neurones convolutionnels (bien qu'elles puissent être agrégées de différentes manières) comme description informative des images. Autrement dit, nous avons formé le réseau pour la classification, puis prenons simplement la sortie devant les couches de classification. Ces signes sont appelés
caractéristiques ,
descripteurs de réseau de neurones ou
imbrications d' images (bien que les incorporations soient généralement acceptées dans la PNL, car il s'agit de vision, je parlerai souvent de
fonctionnalités ). Il s'agit généralement d'une sorte de vecteur numérique, par exemple, 128 nombres, avec lequel vous pouvez déjà travailler.
Mais qu'en est-il des encodeurs automatiques?Oui, en fait, les fonctionnalités peuvent être obtenues par des
auto-encodeurs . Dans ma pratique, ils l'ont fait de différentes manières, mais, par exemple, dans des articles sur la ré-identification (qui seront discutés plus tard), plus souvent, ils prennent toujours des fonctionnalités après l'extracteur, plutôt que de former l'auto-encodeur pour cela. Il me semble qu'il vaut la peine de mener des expériences dans les deux sens, si la question est de savoir ce qui fonctionne le mieux.
Ainsi, le pipeline pour résoudre le
problème de la recherche par image peut être organisé simplement: nous exécutons les images via CNN, prenons les signes des couches souhaitées et comparons ces caractéristiques les unes avec les autres à partir d'images différentes. Par exemple, nous considérons simplement la distance euclidienne de ces vecteurs.
Le transfert d'apprentissage est une technique bien connue pour la formation efficace de réseaux de neurones qui sont déjà formés sur un ensemble de données spécifique pour leur tâche. Souvent, ils disent également que le réglage fin au lieu de l'apprentissage par transfert, dans les
notes de cours de Stanford cs231n, ces concepts sont partagés, disent-ils, l'apprentissage par transfert est une idée générale et le réglage fin est l'une des implémentations de la technique. Ce n'est pas si important pour nous à l'avenir, l'essentiel est de comprendre que nous pouvons simplement former le réseau à bien prédire sur le nouvel ensemble de données, à partir non pas de poids aléatoires, mais de ceux formés sur un grand type ImageNet. Cela est particulièrement vrai lorsqu'il y a peu de données et que vous souhaitez résoudre le problème de manière qualitative.
En savoir plus sur le transfert d'apprentissage Cependant, le simple fait de prendre les fonctionnalités nécessaires et de faire une formation supplémentaire de l'ensemble de données à l'ensemble de données peut ne pas être suffisant, par exemple, pour des tâches de recherche de personnes / personnes / quelque chose de spécifique similaires. Les photos d'une même personne visuellement peuvent parfois être encore plus différentes que les photographies de personnes différentes. Il est nécessaire de faire en sorte que le réseau souligne exactement les signes inhérents à une personne / un objet, même s'il nous est difficile de le faire avec nos yeux. Bienvenue dans le monde de l'
apprentissage de la
représentation .
Restez proches: l'apprentissage de la représentation pour les personnes et les individus
Note terminologiqueSi vous lisez des articles scientifiques, il semble parfois que certains auteurs comprennent différemment l'expression apprentissage métrique , et il n'y a pas de consensus sur les méthodes à appeler apprentissage métrique et celles qui ne le sont pas. C'est pourquoi dans cet article, j'ai décidé d'éviter cette phrase particulière et j'ai utilisé un apprentissage de la représentation plus logique, certains lecteurs peuvent ne pas être d'accord avec cela - je serai heureux de discuter dans les commentaires.
Nous définissons les tâches:
- Tâche 1 : il y a une galerie (ensemble) de photographies de visages de personnes, nous voulons que le réseau puisse répondre selon une nouvelle photo soit avec le nom d'une personne de la galerie (soi-disant c'est ça), soit dit qu'il n'y a pas une telle personne dans la galerie (et, peut-être, nous y ajoutons nouvelle personne)
- Tâche 2 : la même chose, mais nous ne travaillons pas avec des photographies de visages, mais avec un recadrage complet de personnes
La première tâche est généralement appelée
reconnaissance faciale , la seconde - la
ré-identification (en abrégé
Reid ). Je les ai combinés en un seul bloc, car leurs solutions utilisent aujourd'hui des idées similaires: afin d'apprendre des imbrications d'images efficaces qui peuvent faire face à des situations plutôt difficiles, elles utilisent aujourd'hui différents types de pertes, comme, par exemple, la
perte de triplet , la
perte de quadruplet ,
perte de centre contrastif ,
perte de cosinus .
Il existe encore de merveilleux
réseaux siamois , mais honnêtement, je ne les ai pas utilisés moi-même. Soit dit en passant, non seulement la perte elle-même «décide», mais aussi comment échantillonner des paires de positifs et de négatifs pour elle, soulignent les auteurs de l'article
L'échantillonnage compte dans l'apprentissage enraciné en profondeur .
L'essence de toutes ces pertes et réseaux siamois est simple - nous voulons que les images d'une classe (personne) dans l'espace latent des fonctionnalités (plongements) soient «proches», et de différentes classes (personnes) soient «éloignées». La proximité est généralement mesurée comme suit: des incorporations d'images à partir d'un réseau de neurones sont prises (par exemple, un vecteur de 128 nombres) et nous considérons la
distance euclidienne habituelle entre ces vecteurs ou
la proximité cosinus. Comment mesurer, il vaut mieux choisir sur votre ensemble de données / tâche.
Une représentation schématique d'un pipeline de résolution de problèmes sur l'apprentissage de la représentation ressemble à ceci:
Mais pour être plus précis, comme ça: (Softmax + CrossEntropy), (Triplet, Contrastive, etc.). positive' negative'
: - , — . , — - , (,
). .
:
- ( MUST READ! ) ,
FaceNet ,
ArcFace ,
CosFace .
:
dlib ,
OpenFace ,
FaceNet repo ,
. , ArcFace CosFace ( , - , - ).
,
, ?
,
- , , , - , - .
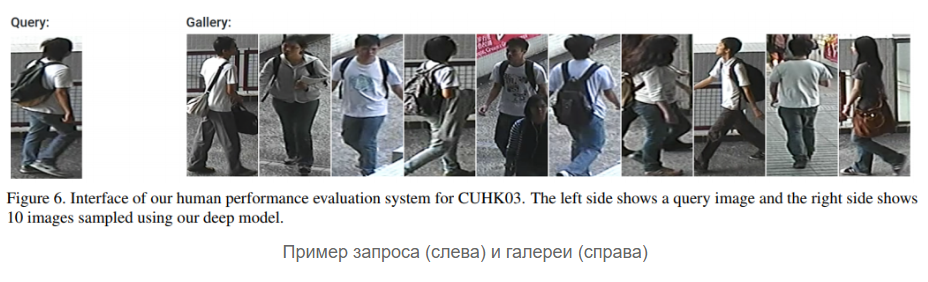
Reid :
, , 10 , 5 ( ), 50 . (), , , ID. , : , , ,
, , , ( / ..).
,
Reid — . , - , - negative' positive'.
Reid
2016 . , , — representation learning. , -, ,
Aligned Re-Id (,
, ),
Generative Adversarial Networks (GAN) .
OpenReid TorchReid . — , ,
. PyTorch, Readme Person Re-identification, .
face- reid- (
, ). ? …
, . , , ? ( ) :
float64, , , float32 .
low-precision training . , , Google
MorphNet , ( ) .
?
DL CV: , , , . : , , . ,
, , . .
Stay tuned!