Salut, Habr. Dans cet article, je vais parler d'un simple robot d'exploration contrôlé fabriqué à partir d'un ancien lecteur de CD. Je veux transmettre seulement une idée, pas un design spécifique, afin que chacun puisse faire quelque chose de similaire des détails disponibles s'il le souhaite. L'article contient de nombreuses photos claires et trois gifs totalisant 25 Mo.
Si quelqu'un aime regarder plus de vidéos,
voici une vidéo sur ce robot .
De nombreux amateurs d'électronique pensent à ce qui peut être fait à partir de lecteurs de CD obsolètes à notre époque. L'application la plus courante est un graveur laser de la tête laser d'un graveur de DVD et une table de coordonnées de deux mouvements de cette tête. Les portes automatiques sont généralement fabriquées à partir d'une table coulissante pour un disque (par exemple, pour les chats ou les hamsters). J'ai fabriqué deux jouets à partir d'une table gigogne: une "voiture inutile" et un robot rampant. Je ne parlerai pas d'une voiture inutile, car c'est très simple. Peu importe, vous pouvez regarder une
vidéo à son sujet .
Cependant, l'idée d'un robot rampant est également très simple. Si quelqu'un n'est pas familier avec la conception d'un lecteur de CD,
vous pouvez le lire sur Wikipedia .
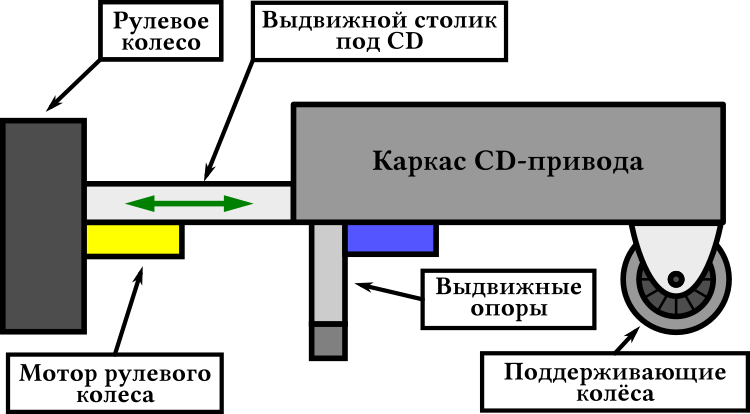
Je vais commencer par une description théorique. La figure ci-dessous montre un lecteur de CD rampant sur le côté. Il a deux roues à rotation libre à l'arrière, appelées "roues de support". À l'avant, il y a un «volant» avec son propre moteur. Ci-dessous, il y a deux supports extensibles pour soulever le volant.
Dans la figure suivante, la vue de face, cependant, elle s'est avérée peu comprise.

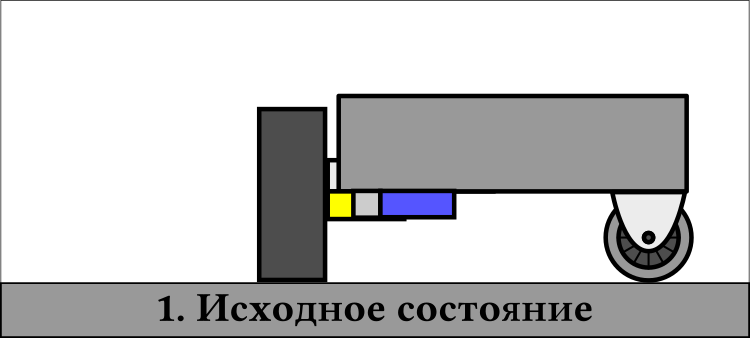
La manière dont ce système évolue est également illustrée dans les figures. Il y a donc un état initial lorsque la table coulissante du CD et les supports sont insérés. De cette position, le robot commence à avancer, reculer et effectue un virage.
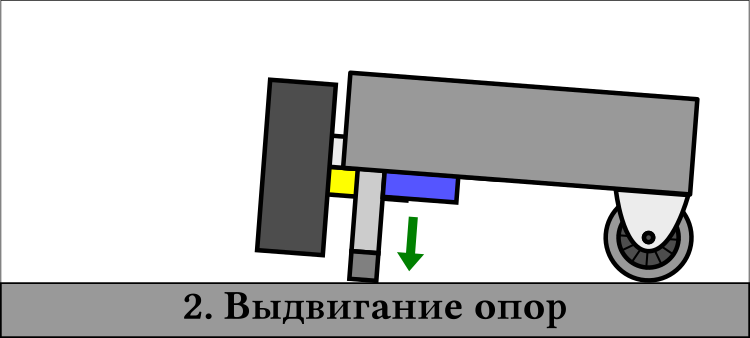
Pour avancer, les supports s'étendent d'abord, soulevant ainsi le volant.
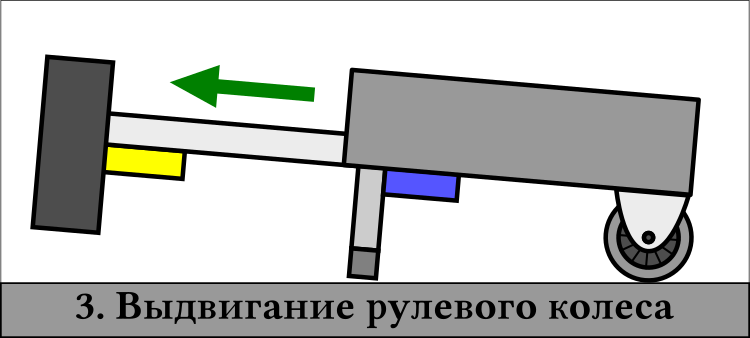
Ensuite, la table CD s'étend avec le volant.
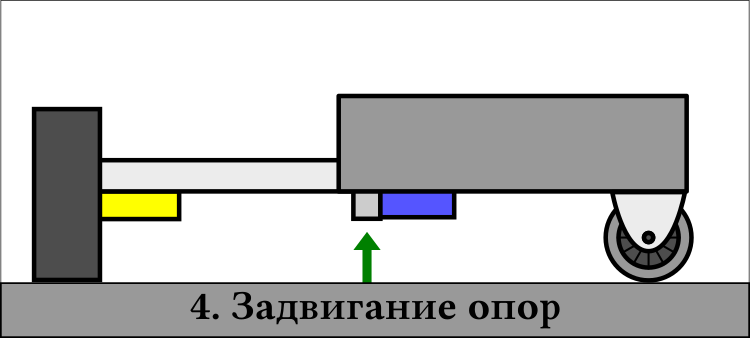
De plus, les supports se rétractent et le volant s'abaisse.
Il reste maintenant à revenir à son état d'origine en faisant glisser le tableau du CD.
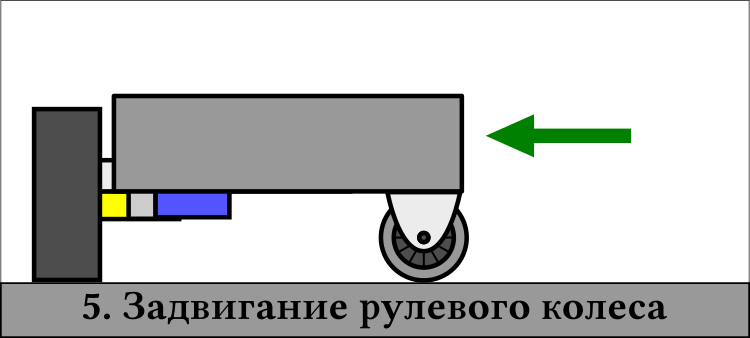
Dans ce cas, le volant s'accroche à la surface du sol, de sorte que tout le cadre du lecteur de CD est tiré vers le volant. Ensuite, le cycle se répète.
Pour faire tourner le robot dans l'état initial, le moteur du volant est allumé, tandis que l'ensemble du système commence à tourner à 360 degrés autour d'un axe situé quelque part entre les roues de support.
Si vous comprenez comment cette chose fonctionne, il ne vous sera pas difficile d'imaginer comment le mouvement vers l'arrière est effectué.
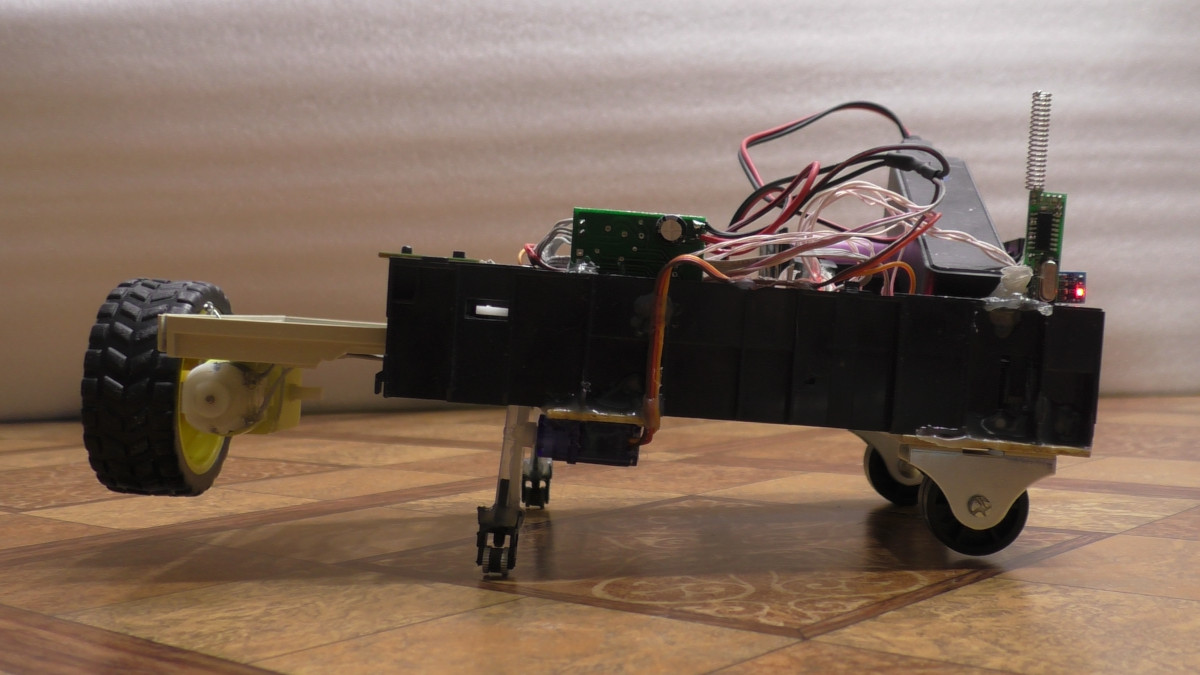
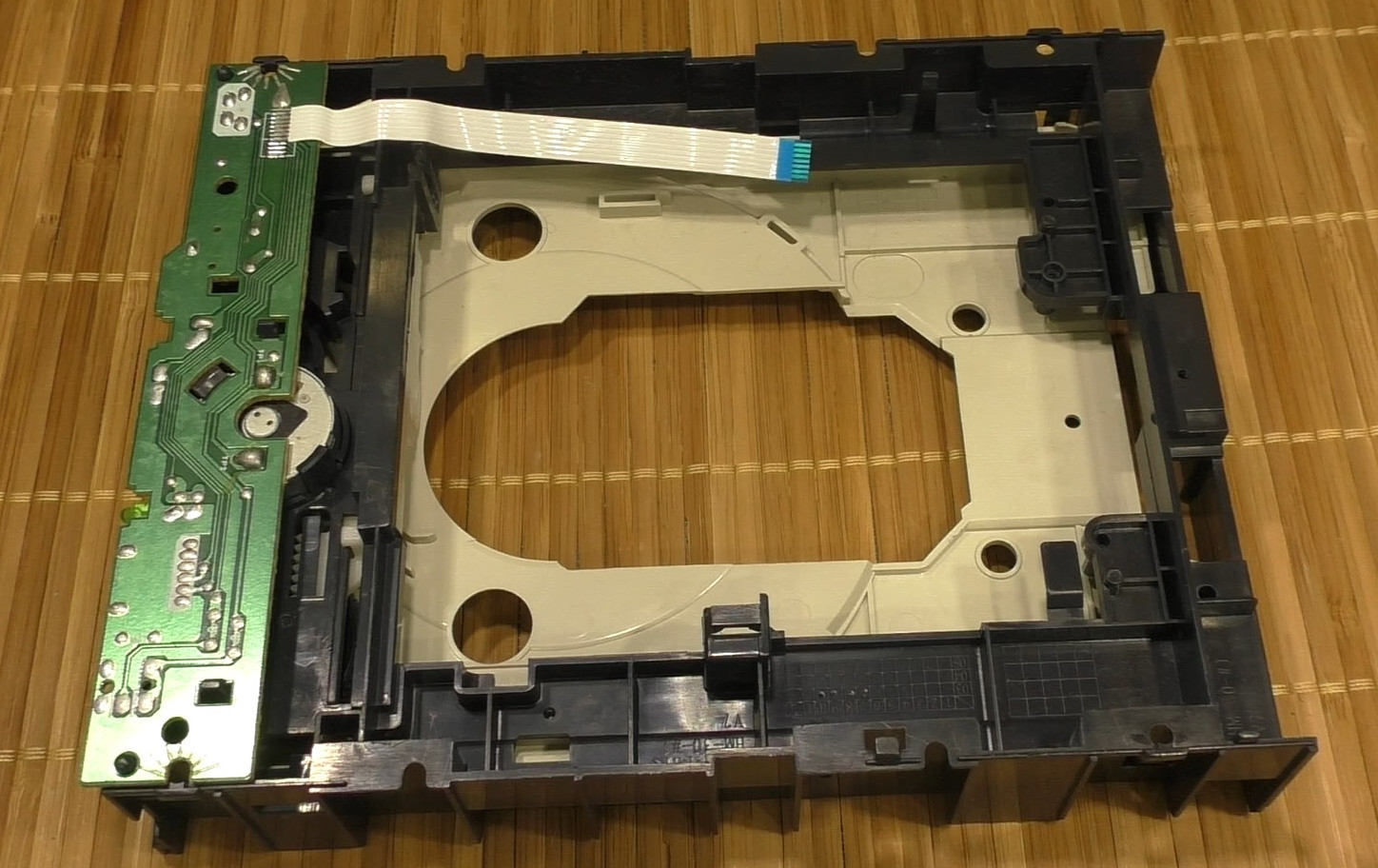
Maintenant, un peu sur ma mise en œuvre. Je ne le dirai pas en détail, car tout a été fait au hasard, juste pour vérifier la capacité de travail de l'idée. J'ai utilisé un simple lecteur de CD comme base, j'ai sorti toutes les optiques avec une diapositive, il n'y avait qu'un cadre en plastique avec une table rétractable, un moteur et des interrupteurs à bouton pour la table.
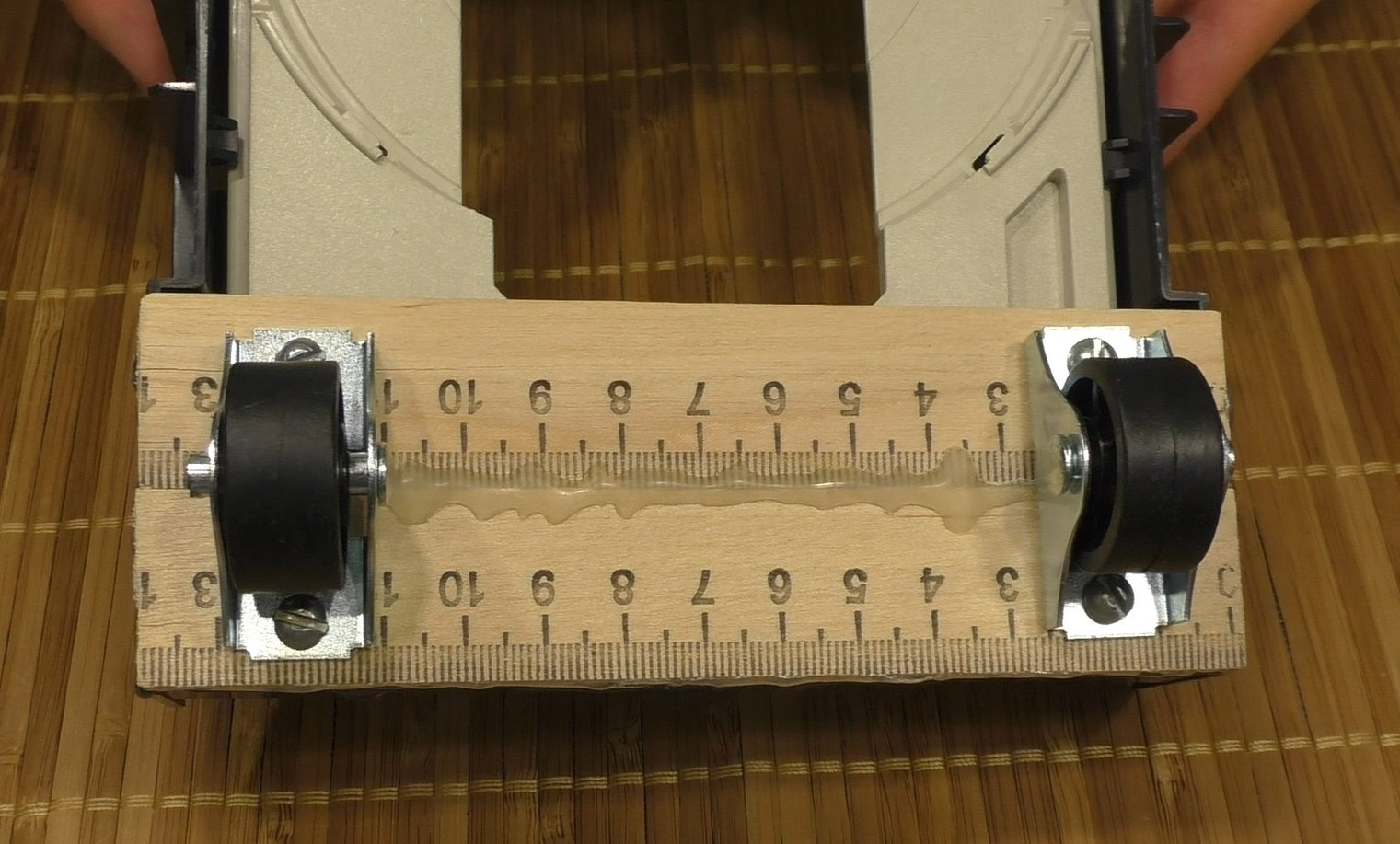
Roues de meubles attachées comme roues de support.
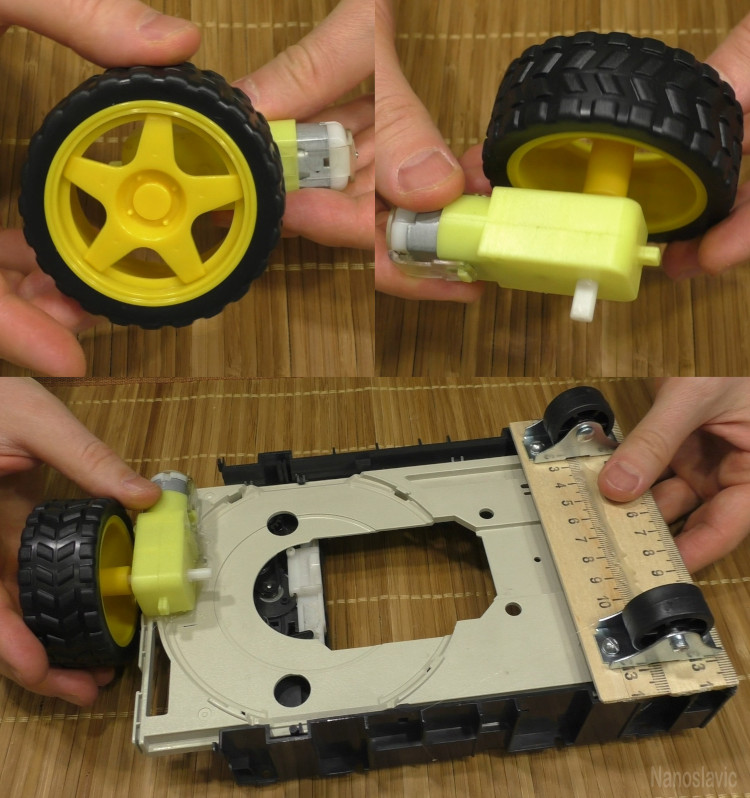
J'ai acheté le volant séparément quelque part sur Internet. Il a un moteur et une boîte de vitesses en plastique.
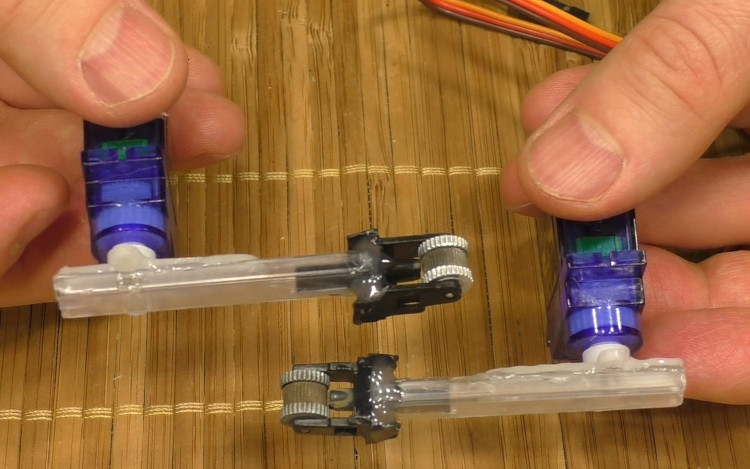
Supports rétractables en tubes plastiques, vendus en copeaux en vrac dans le boîtier SO8. Je leur ai attaché une chaise des briquets, après avoir préalablement retiré le silex et le ressort, afin que la chaise puisse tourner librement. Pour étendre les supports, deux servos bon marché ont été utilisés. Tout est assemblé principalement sur un adhésif thermofusible.
L'électronique était faite de ce qu'elle était, elle n'est donc pas optimale. Pour contrôler les moteurs de la table CD et du volant, un circuit en pont avec transistors a été utilisé. Cela a permis de changer le sens de rotation. Comme logique - une sorte de carte Arduino. Pour contrôler le mouvement, il a pris un porte-clés et un circuit de réponse du récepteur à une fréquence de 434 MHz.

Pour alimenter les moteurs, j'ai connecté trois batteries lithium-ion en série sans aucune protection, je l'ai donc allumée avec prudence, vérifiant parfois leur charge. Pour alimenter la partie numérique et la radio, j'ai utilisé une petite banque d'alimentation bon marché délivrant 5 V.
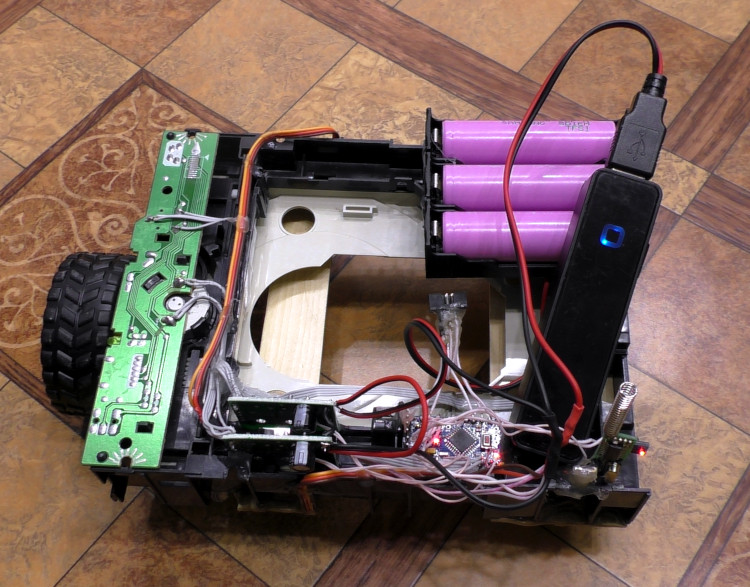
Les piles à l'arrière sont très pratiques, car le volant l'emporte largement sur la poussée vers l'avant.
Lorsqu'il est activé, le programme de contrôle vérifie les points d'extrémité du tiroir CD et restaure le système à son état d'origine. Pour le contrôle, 4 boutons sont utilisés. Lorsque vous appuyez sur le bouton "Avant", le mouvement vers l'avant commence. L'arrêt et le retour à l'état initial du système se produisent lorsque vous appuyez sur n'importe quel bouton de la télécommande. Lorsque le bouton «Retour» est enfoncé, il recule, également avec un arrêt lorsque vous appuyez sur n'importe quel bouton. Les boutons Gauche et Droite ne fonctionnent que dans leur état initial et uniquement lorsqu'ils sont enfoncés.
En conséquence, il s'est avéré que seul le mouvement vers l'avant fonctionne normalement. Lorsque vous reculez, le centre de gravité se déplace considérablement lorsque le volant est déployé, de sorte que les supports ne peuvent pas le soulever normalement. Besoin de servos plus puissants. Comme le système revient toujours à son état d'origine, le mouvement n'est possible qu'avec les «étapes» déterminées par la longueur de la table pour le CD, mais il s'agit d'une limitation purement logicielle.
Et enfin, quelques gifs.
Mouvement vers l'avant, vue latérale, 6,8 Mo Mouvement vers l'avant, vue de dessus, 7,8 Mo Rotation, vue de dessus, 6,3 Mo Je pense que tout le système peut être simplifié en faisant un panneau de contrôle sur une boucle, et contrôler les moteurs avec des boutons et des commutateurs. Pour contrôler les servos, vous pouvez créer un générateur simple sur les minuteries 555. L'alimentation peut être faite à partir de batteries ordinaires et les placer dans la télécommande, ce qui réduit le poids du robot. Une telle télécommande vous permettra de contrôler le robot complètement manuellement.
Merci à tous pour votre attention et votre bon artisanat.