 Photo de la collection de l'auteur
Photo de la collection de l'auteur1. Histoire
La mémoire à bulles, ou mémoire sur des domaines magnétiques cylindriques, est une mémoire non volatile développée par Bell Labs en 1967 par Andrew Bobeck. Des études ont montré que de petits domaines magnétiques cylindriques se forment dans des films minces monocristallins de ferrite et de grenat, lorsqu'un champ magnétique suffisamment puissant est dirigé perpendiculairement à la surface du film. En modifiant le champ magnétique, vous pouvez déplacer ces bulles. Ces propriétés font des bulles magnétiques un outil idéal pour construire un stockage séquentiel de bits, comme un registre à décalage, dans lequel la présence ou l'absence d'une bulle dans une certaine position signifie zéro ou une valeur de bit unique. Le diamètre de la bulle est de dixièmes de micron, une puce peut stocker des milliers de bits de données. Par exemple, au printemps 1977, Texas Instruments a introduit pour la première fois une puce 92304 bits sur le marché. Cette mémoire est non volatile, ce qui la fait ressembler à une bande magnétique ou à un disque, mais comme elle est à l'état solide et ne contient pas de pièces mobiles, elle est plus fiable qu'une bande ou un disque, ne nécessite pas d'entretien et a également des dimensions et un poids beaucoup plus petits et peut être utilisé dans des appareils portables.
L'inventeur d'origine de la mémoire à bulles, Andrew Bobek, a proposé une version «unidimensionnelle» de la mémoire, sous la forme d'un fil sur lequel est enroulée une fine bande de matériau ferromagnétique. Une telle mémoire s'appelait "twistor", et était même produite en série, mais fut bientôt remplacée par une version "bidimensionnelle".
Vous pouvez vous familiariser avec l'histoire de la création de la mémoire à bulles dans [1-3].
2. Le principe d'action
Ici je vous demande de me pardonner, je ne suis pas physicien, donc la présentation sera très approximative.
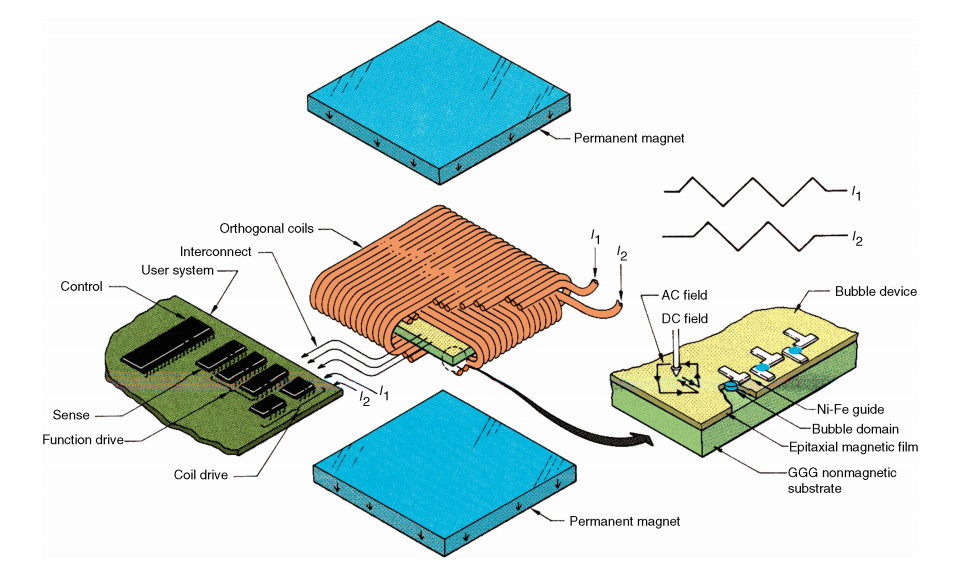
Certains matériaux (par exemple, le grenat gadolinium-gallium) ont la propriété d'être magnétisés dans une seule direction, et si un champ magnétique constant est appliqué le long de cet axe, les régions magnétisées formeront quelque chose comme des bulles, comme le montre la figure ci-dessous. Chaque bulle ne mesure que quelques microns de diamètre.
Supposons que nous ayons un film cristallin mince, de l'ordre de 0,001 pouce, d'un tel matériau déposé sur un substrat non magnétique, par exemple du verre.
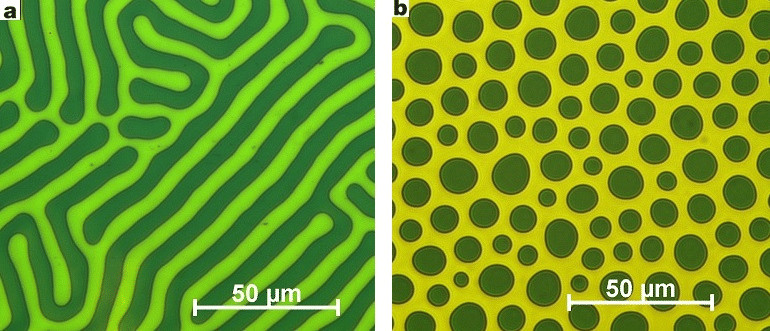 Tout tourne autour des bulles magiques. Image à gauche - il n'y a pas de champ magnétique, image à droite - le champ magnétique est dirigé perpendiculairement à la surface du film.
Tout tourne autour des bulles magiques. Image à gauche - il n'y a pas de champ magnétique, image à droite - le champ magnétique est dirigé perpendiculairement à la surface du film.Si sur la surface d'un film d'un tel matériau un motif de matériau magnétique est formé, par exemple du permalloy, un alliage fer-nickel, alors les bulles seront magnétisées aux éléments de ce motif. Les modèles en forme de T ou de V sont généralement utilisés.
Une seule bulle peut être formée par un champ magnétique de 100-200 Oersted, qui est appliqué perpendiculairement au film magnétique et est créé par un aimant permanent, et un champ magnétique tournant formé par deux bobines dans les directions XY vous permet de déplacer des bulles de domaine d'un «îlot» magnétique à un autre, comme ceci montré sur la figure. Après un quadruple changement de direction du champ magnétique, le domaine se déplace d'une île à l'autre.
Tout cela nous permet de considérer le dispositif CMD comme un registre à décalage. Si nous formons des bulles à une extrémité du registre et les détectons à l'autre, alors nous pouvons lancer un certain motif de bulles dans un cercle et utiliser le système comme un périphérique de stockage, en lisant et en écrivant des bits à certains moments.
Les avantages et les inconvénients de la mémoire sur le CMD découlent d'ici: l'avantage est la non-volatilité (tant que le champ perpendiculaire créé par les aimants permanents est appliqué, les bulles ne disparaîtront pas et ne bougeront pas de leurs positions), et l'inconvénient est le long temps d'accès, car Pour accéder à un bit arbitraire, vous devez faire défiler tout le registre à décalage jusqu'à la position souhaitée, et plus il est long, plus il faudra de cycles.
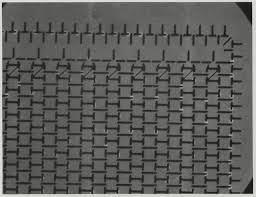 Le motif des éléments magnétiques sur une bande magnétique CMD.
Le motif des éléments magnétiques sur une bande magnétique CMD.La création d'un domaine magnétique est appelée en anglais "nucléation", et consiste dans le fait qu'un courant de plusieurs centaines de milliampères est appliqué à l'enroulement pendant un temps d'environ 100 ns, et un champ magnétique est créé perpendiculairement au film et opposé au champ de l'aimant permanent. Cela crée une «bulle» magnétique - un domaine magnétique cylindrique dans le film. Malheureusement, le processus dépend fortement de la température, l'opération d'écriture peut échouer si une bulle ne se forme pas ou si plusieurs bulles se forment.
Plusieurs techniques sont utilisées pour lire les données du film.
Une méthode de lecture non destructive consiste à détecter un faible champ magnétique d'un domaine cylindrique à l'aide d'un capteur magnétorésistif.
La deuxième voie est la lecture destructrice. La bulle est détournée vers une piste de génération / détection spéciale dans laquelle la bulle est détruite en magnétisant le matériau vers l'avant. Si le matériau était magnétisé dans la direction opposée, c'est-à-dire qu'une bulle était présente, cela entraînera un courant plus important dans la bobine, ce qui est détecté par le circuit électronique. Après cela, la bulle doit être régénérée sur une piste d'enregistrement spéciale.
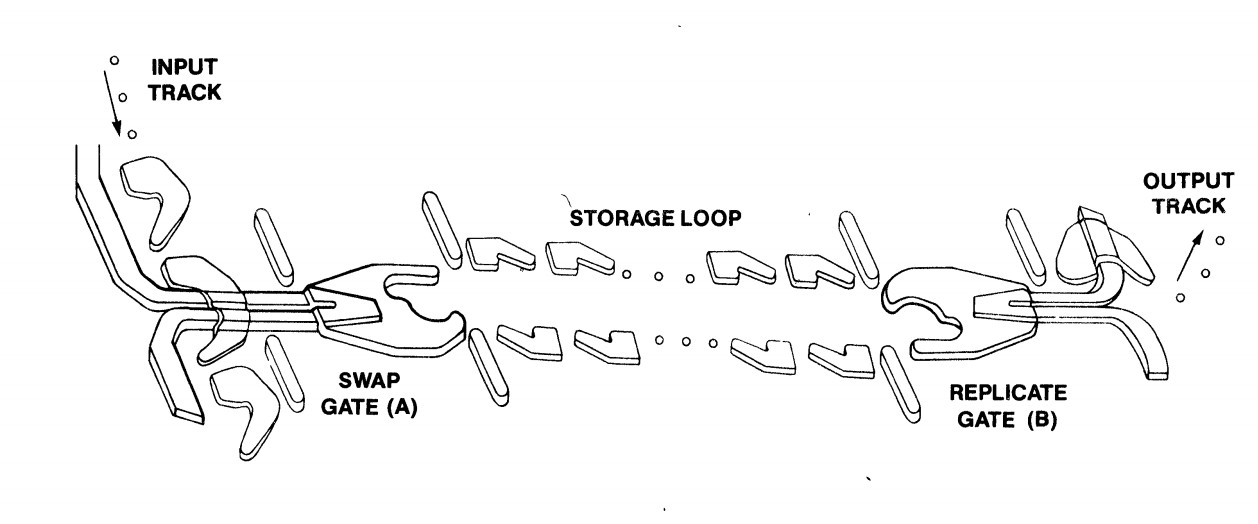
Cependant, si la mémoire est organisée en un seul tableau continu, elle aura alors deux inconvénients majeurs. Premièrement, le temps d'accès sera très long. Deuxièmement, le seul défaut de la chaîne entraînera l'inopérabilité totale de l'ensemble de l'appareil. Par conséquent, ils créent une mémoire organisée sous la forme d'une piste principale et de nombreuses pistes subordonnées, comme le montre la figure.
 Mémoire à bulles avec une piste continue
Mémoire à bulles avec une piste continue Mémoire à bulles avec pistes maître / esclave
Mémoire à bulles avec pistes maître / esclaveCette configuration de la mémoire permet non seulement de réduire considérablement le temps d'accès, mais permet également de libérer des dispositifs de mémoire contenant un certain nombre de pistes défectueuses. Le contrôleur de mémoire doit les prendre en compte et les contourner lors des opérations de lecture / écriture.
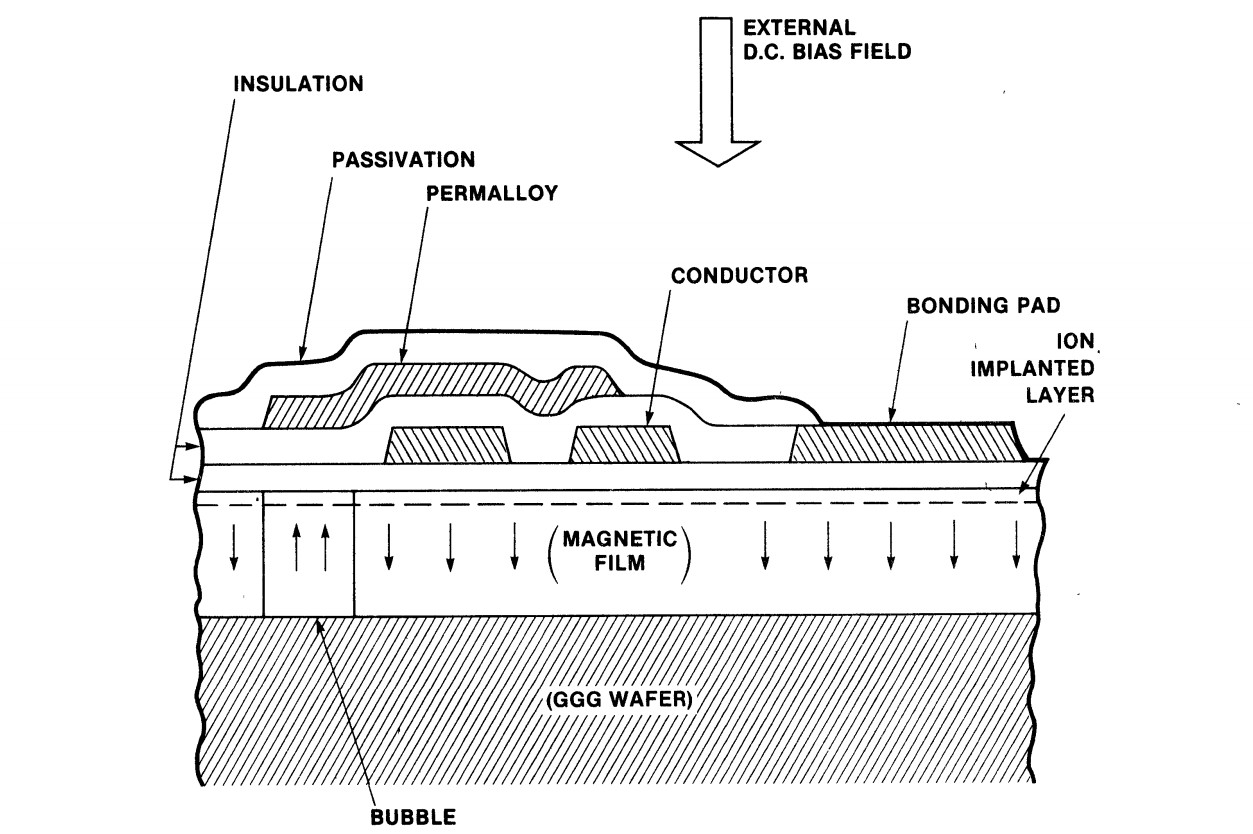
La figure ci-dessous montre une section de la "puce" de la mémoire à bulles.
Vous pouvez également lire sur le principe d'action de la mémoire à bulles dans [4, 5].
3. Intel 7110
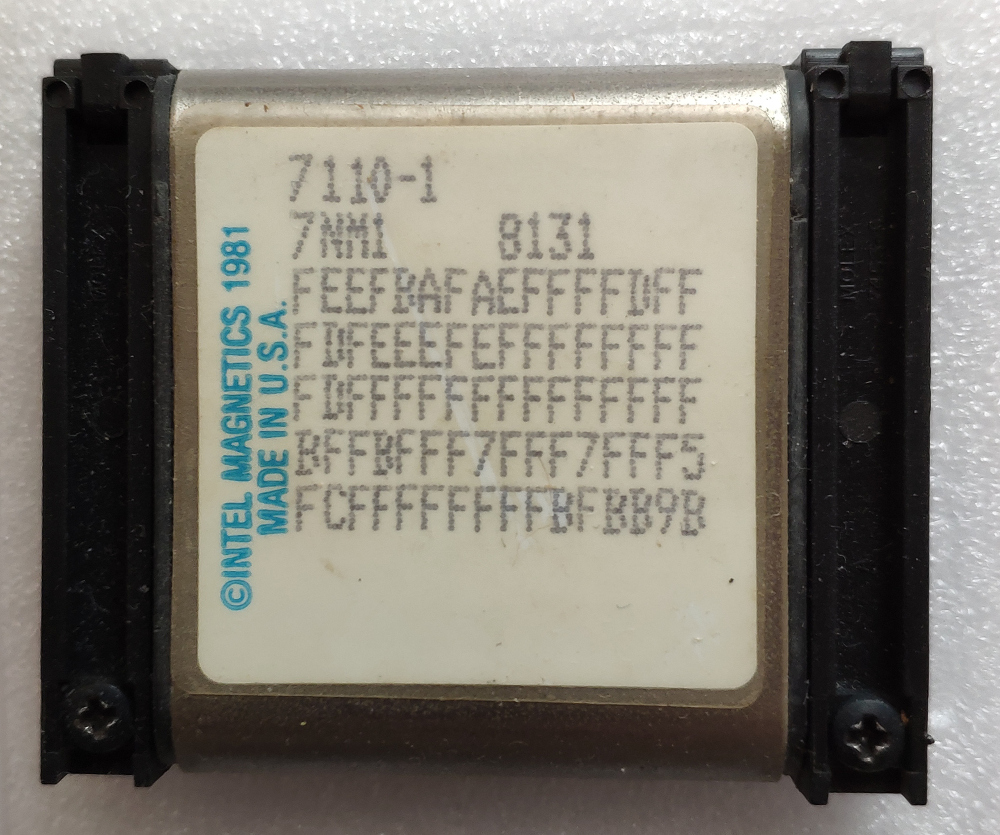
Intel 7110 - module de mémoire à bulles, MBM (mémoire à bulles magnétiques) d'une capacité de 1 Mo (1048576 bits). C'est lui qui est représenté sur le KDPV. 1 mégabit est une capacité de stockage de données utilisateur, en tenant compte des pistes redondantes, la pleine capacité est de 1310720 bits. L'appareil contient 320 boucles d'une capacité de 4096 bits chacune, mais seulement 256 d'entre elles sont utilisées pour les données utilisateur, le reste est une réserve pour remplacer les pistes «battues» et pour stocker le code de correction d'erreur redondant. Le dispositif a l'architecture des «pistes principales subordonnées» (boucle majeure piste mineure). Les informations sur les pistes actives sont contenues dans une piste de démarrage distincte (boucle de bootstrap). Sur le KDPV, vous pouvez voir le code hexadécimal imprimé directement sur le module. Il s'agit d'une carte de pistes «cassées», 80 chiffres hexadécimaux représentent 320 pistes de données, les pistes actives sont représentées par un seul bit, les bits inactifs sont représentés par zéro.
Vous pouvez lire la documentation d'origine du module dans [7].
L'appareil a un boîtier avec une disposition à deux rangées de bornes et est monté sans soudure (dans la prise).
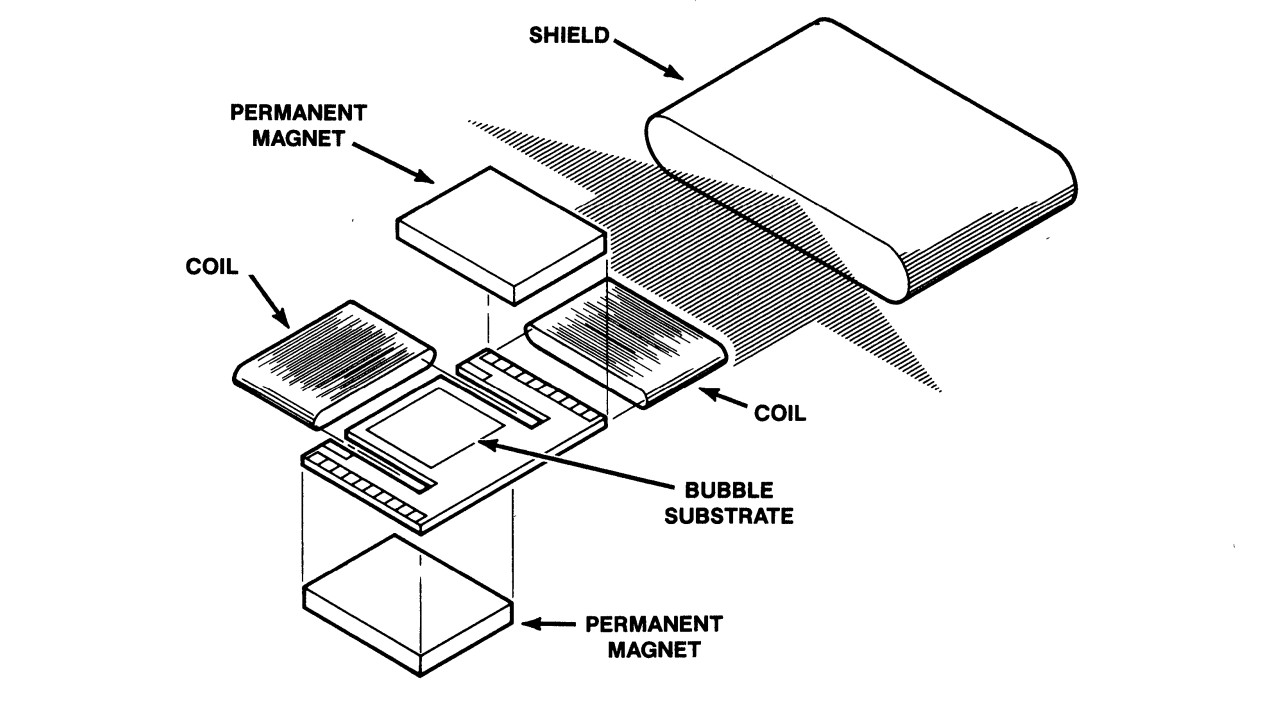
La structure du module est illustrée dans la figure:
La matrice de mémoire est divisée en deux "demi-sections" (demi-sections), chacune étant divisée en deux "quarts" (quads), chaque trimestre ayant 80 pistes subordonnées. Le module contient une plaque en matériau magnétique située à l'intérieur de deux enroulements orthogonaux qui créent un champ magnétique rotatif. Pour ce faire, des signaux de courant de forme triangulaire sont fournis aux enroulements, décalés de 90 degrés les uns par rapport aux autres. L'assemblage de la plaque et des enroulements est placé entre les aimants permanents et placé dans un écran magnétique, qui ferme le flux magnétique généré par les aimants permanents et protège l'appareil des champs magnétiques externes. La plaque est placée à un angle de 2,5 degrés, ce qui crée un petit champ de polarisation dirigé le long de l'inclinaison. Ce champ est négligeable par rapport au champ des bobines, et n'interfère pas avec le mouvement des bulles lors du fonctionnement de l'appareil, mais déplace les bulles vers des positions fixes par rapport aux éléments en permalloy lorsque l'appareil est éteint. La forte composante perpendiculaire des aimants permanents soutient l'existence de domaines magnétiques à bulles.
Le module contient les nœuds suivants:
- Mémorisation des pistes. Directement ces traces d'éléments en permalloy qui retiennent et dirigent les bulles.
- Générateur de réplication. Sert à répliquer la bulle, qui est constamment présente sur le site de génération.
- Entrer les nœuds de suivi et d'échange. Les bulles générées se déplacent le long de la piste d'entrée. Les bulles se déplacent vers l'une des 80 pistes subordonnées.
- Piste de sortie et nœud de réplication. Les bulles sont soustraites des pistes de données sans les casser. La bulle est divisée en deux parties et l'une d'elles est envoyée à la piste de sortie.
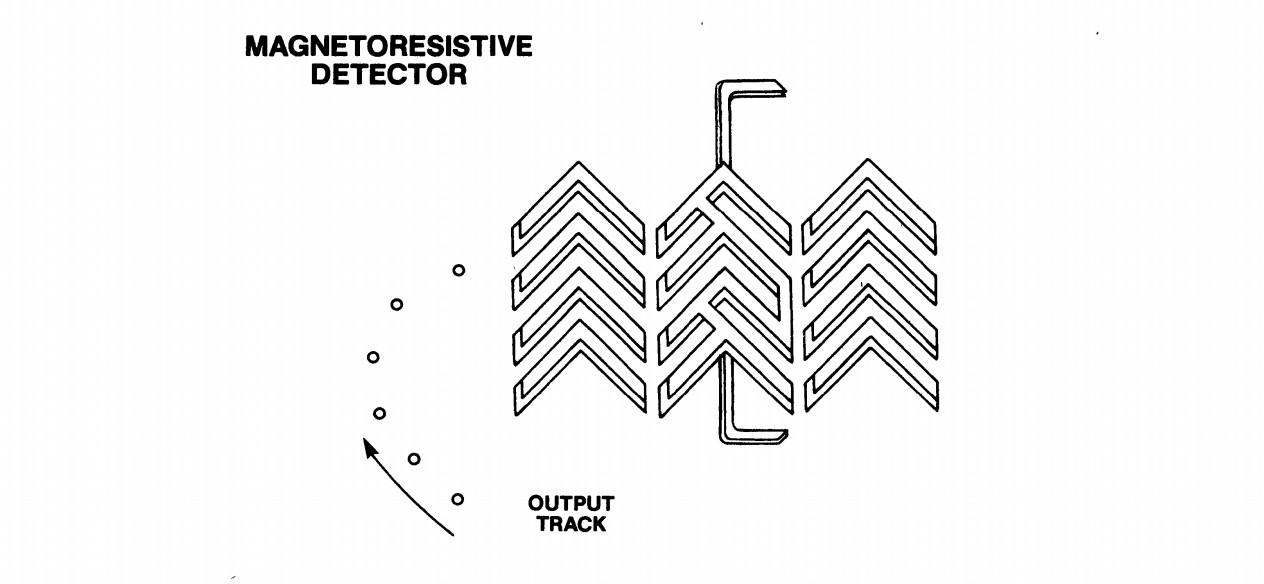
- Détecteur Des bulles provenant de la piste de sortie tombent dans le détecteur magnétorésistif.
- Piste de démarrage. La piste de démarrage contient des informations sur les pistes de données actives et inactives.
Ci-dessous, nous examinerons ces nœuds plus en détail. Vous pouvez également lire la description de ces nœuds dans [6].
Génération de bulles
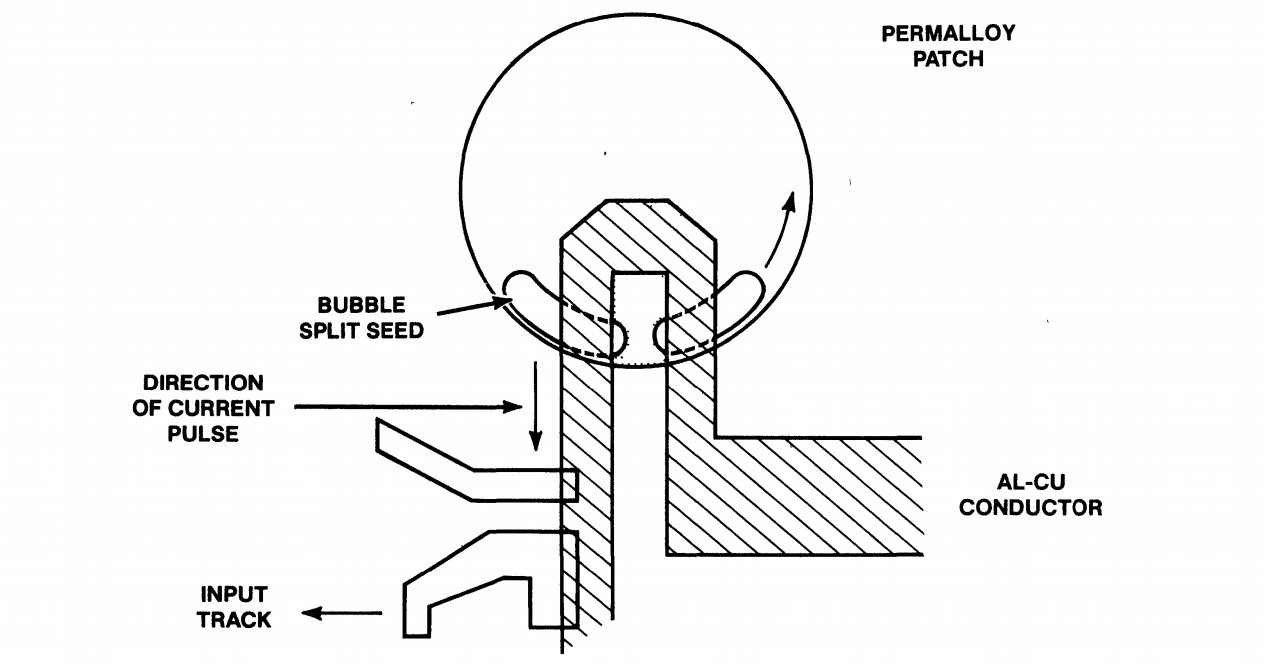
Pour générer une bulle, au tout début de la piste d'entrée, il y a un conducteur incurvé sous la forme d'une petite boucle. Une impulsion de courant lui est appliquée, ce qui crée un champ magnétique plus fort dans une très petite région que le champ des aimants permanents. L'impulsion crée une bulle à cet endroit, qui reste constante, soutenue par un champ magnétique constant, et circule le long de l'élément en permalloy sous l'action d'un champ magnétique tournant. Si nous avons besoin d'écrire une unité dans la mémoire, nous donnons une courte impulsion à la boucle conductrice, et en conséquence deux bulles sont nées (indiquées dans l'image comme graine fendue de bulle). L'une des bulles se précipite par un champ tournant le long de la piste en permalloy, la seconde reste en place et acquiert rapidement sa taille d'origine. Ensuite, il se déplace vers l'une des pistes subordonnées et change de place avec une bulle qui y circule. Lui, à son tour, atteint la fin de la piste d'entrée et disparaît.
Échange de bulles
L'échange de bulles se produit lorsqu'une impulsion de courant rectangulaire est appliquée au conducteur correspondant. Il n'y a pas de séparation de la bulle en deux parties.
Lecture des données
Les données sont envoyées à la piste de sortie en les répliquant et continuent de circuler dans sa piste après la lecture. Ainsi, la méthode de lecture non destructive est mise en œuvre dans ce dispositif. Pour la réplication, la bulle est dirigée sous l'élément de permalloy oblong, sous lequel elle s'étire. Il y a aussi un conducteur en forme de boucle sur le dessus, si une impulsion de courant est appliquée à la boucle, la bulle se divisera en deux parties. L'impulsion de courant se compose d'une section courte avec une grande intensité de courant afin de diviser la bulle en deux parties, et d'une section plus longue avec une intensité de courant inférieure, afin de diriger la bulle vers la piste de sortie.
À la fin de la piste de sortie se trouve un détecteur de bulles, un pont magnétorésistif composé d'éléments en permalloy qui forment une longue chaîne. Lorsqu'une bulle magnétique tombe sous un élément en permalloy, sa résistance change et une différence de potentiel de plusieurs millivolts apparaît à la sortie du pont. La forme des éléments en permalloy est choisie de manière à ce que la bulle se déplace le long d'eux, à la fin elle tombe sur un pneu spécial "garde" et disparaisse.
Redondance
L'appareil contient 320 pistes, chacune de 4096 bits. Parmi ceux-ci, 272 sont actifs, 48 sont de rechange, inactifs.
Boucle de démarrage
L'appareil contient 320 pistes de données, dont 256 sont destinées à stocker des données utilisateur, le reste peut être défectueux ou peut servir de rechange pour remplacer les défaillantes. Une piste supplémentaire contient des informations sur l'utilisation des pistes de données, 12 bits par piste. Lorsque le système est alimenté, il doit être initialisé. Pendant le processus d'initialisation, le contrôleur doit lire la piste de démarrage et en écrire les informations dans le registre spécial de la puce de formatage / capteur de courant. Ensuite, le contrôleur n'utilisera que les pistes actives et les inactives seront ignorées et elles ne seront pas enregistrées.
Entrepôt de données - Structure
Du point de vue de l'utilisateur, les données sont stockées dans 2 048 pages de 512 bits chacune. 256 octets de données, 14 bits du code de correction d'erreur et 2 bits inutilisés sont stockés dans chaque moitié de l'appareil.
Correction d'erreurs
Les erreurs peuvent être détectées et corrigées à l'aide d'une puce de capteur de courant qui contient un décodeur de code 14 bits qui corrige une seule erreur de rafale dans chaque bloc de 270 bits (y compris le code lui-même). Le code est ajouté à la fin de chaque bloc de 256 bits. Le code de correction peut être utilisé ou non, à la demande de l'utilisateur, la vérification du code peut être activée ou désactivée dans le contrôleur. Si le code n'est pas utilisé, les 270 bits peuvent être utilisés pour les données utilisateur.
Temps d'accès
Le champ magnétique tourne à une fréquence de 50 kHz. Le temps d'accès moyen au premier bit de la première page est de 41 ms, soit la moitié du temps nécessaire pour terminer le cycle sur la piste plus le temps qu'il faut pour quitter la piste.
320 pistes actives et de rechange sont divisées en quatre parties de 80 pistes chacune. Une telle organisation réduit le temps d'accès. Les trimestres sont adressés par paires: chaque paire de trimestres contient respectivement des bits pairs et impairs du mot. L'appareil contient quatre pistes d'entrée avec quatre bulles initiales et quatre pistes de sortie. Les pistes de sortie utilisent deux détecteurs; elles sont organisées de telle sorte que deux bulles de deux pistes en même temps ne tombent jamais dans un seul détecteur. Ainsi, quatre flux de bulles sont multiplexés et convertis en flux de deux bits et stockés dans les registres de puce de capteur actuels. Là, le contenu des registres est à nouveau multiplexé et via l'interface série, il entre dans le contrôleur.
Dans la deuxième partie de l'article, nous examinerons plus en détail les circuits du contrôleur de mémoire à bulles.
4. Références
L'auteur a trouvé dans les coins les plus sombres du réseau et a enregistré pour vous une mine d'informations techniques utiles sur la mémoire du CMD, son histoire et d'autres aspects connexes:
1.
https://old.computerra.ru/vision/621983/ - Deux souvenirs de l'ingénieur Bobek
2.
https://old.computerra.ru/vision/622225/ - Deux mémoires de l'ingénieur Bobek (partie 2)
3.
http://www.wikiwand.com/en/Bubble_memory - Mémoire de bulles
4.https: //cloud.mail.ru/public/3qNi/33LMQg8Fn Adaptation de la mémoire à bulles magnétiques dans un environnement de micro-ordinateur standard
5.
https://cloud.mail.ru/public/4YgN/ujdGWtAXf - Mémoire à bulles Texas Instruments TIB 0203
6.
https://cloud.mail.ru/public/4PRV/5qC4vyjLa - Manuel des composants de mémoire. Intel 1983.
7.
https://cloud.mail.ru/public/4Mjv/41Xrp4Rii 7110 Mémoire à bulles 1 mégabit