
Il reste un peu plus de deux mois avant le lancement du robot FEDOR sur l'ISS, et le processus de sa transformation en cyber-cosmonaute est presque terminé.
Suite de cette publication .
Le Fedor Robot ou FEDOR (Final Experimental Demonstration Object Research) est un robot anthropomorphe développé par l'ONG Android Technique et la Advanced Research Foundation (FPI), et devrait remplacer une personne dans des endroits à haut risque.
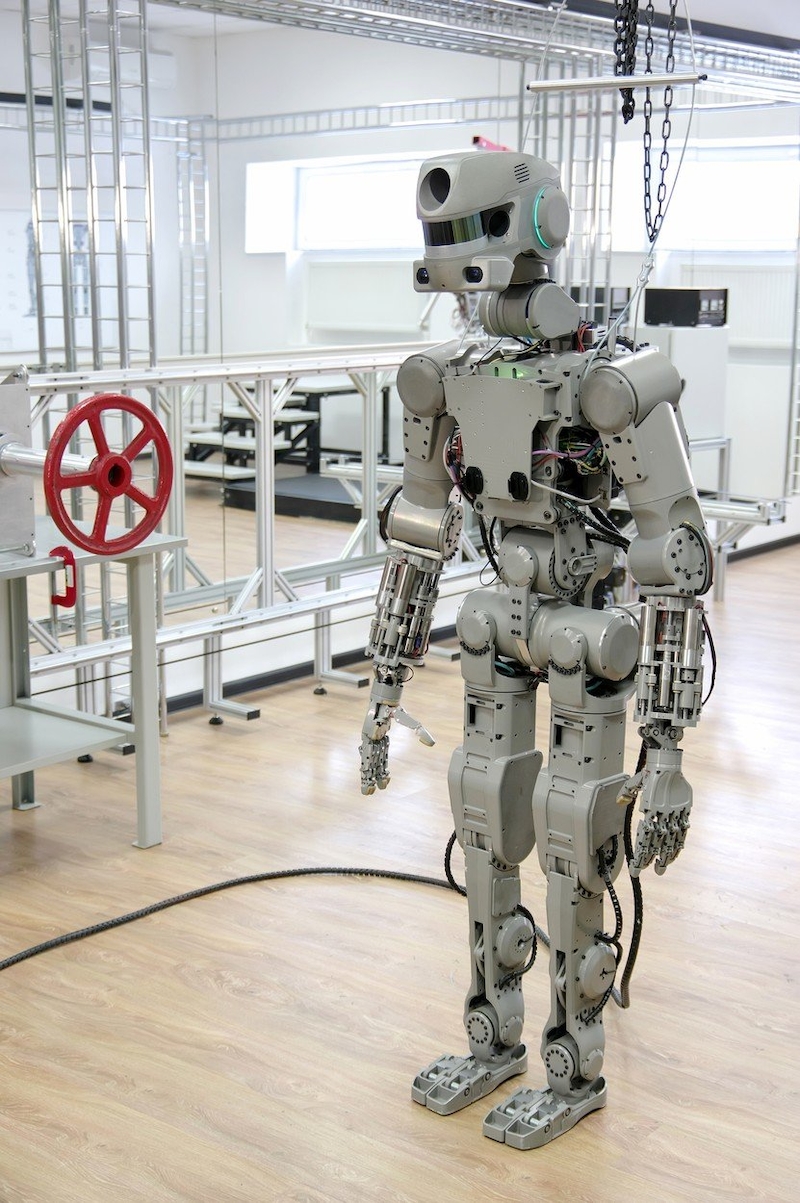 Caractéristiques du robot FEDOR:
Caractéristiques du robot FEDOR:- presque 190 cm de haut;
- poids jusqu'à 160 kg (selon les modules utilisés);
- puissance jusqu'à 13,5 kW (20 chevaux), batterie - sacoche de type externe ou alimentation par câble;
- se compose de 15 mille pièces;
- logiciel: système d'exploitation temps réel développé à Saint-Pétersbourg sur la base de Linux, logiciel de contrôle en C ++, C # et Python;
- travail hors ligne jusqu'à 1 heure;
- équipé de deux caméras, imageur thermique, microphone, GPS, GLONASS, 15 lasers de type télémètre et un système spécial pour déterminer la position de votre corps;
- les canaux vidéo du système de vision stéréoscopique du robot peuvent fonctionner conjointement et séparément (le travail conjoint des canaux vous permet de déterminer la distance aux objets et de les séparer - résoudre au moins deux tâches fonctionnelles en même temps, par exemple, effectuer des actions de travail avec deux outils différents en même temps);
- modes de fonctionnement: autonome, copie (répète exactement les actions de l'opérateur);
- la mécanique du robot peut reproduire presque tous les mouvements du corps humain, et les logiciels, y compris les bibliothèques réapprovisionnées, vous permettent d'étendre les compétences professionnelles du robot.
Il s'avère qu'à Roscosmos, ils prévoyaient d'envoyer deux robots FEDOR à l'ISS simultanément sur le véhicule sans pilote Soyouz MS le 22 août 2019.
Ce projet d'essai spatial s'appelait le Cyber Crew. Cependant, la mise en œuvre complète de ce projet est toujours en question.
Le problème est que le robot FEDOR dans ce cas passe selon les calculs de conception non pas comme un équipement scientifique qui peut être placé de manière compacte dans le compartiment à bagages et déballé et utilisé à bord de l'ISS, mais comme une construction humanoïde à part entière qui doit être placée comme des astronautes ordinaires à l'intérieur du navire "Union MS-14."
Puisque, premièrement, les astronautes de l'ISS ne sont pas formés pour assembler un appareil aussi complexe, et selon les instructions de la Terre, ils pourront l'assembler, mais un temps précieux sera consacré à cela.
Deuxièmement, ce premier vol d'essai du "cyber équipage" devrait en tout cas révéler de nombreux problèmes et problèmes qui seront résolus à la fois à bord de l'ISS dans le mode opérationnel actuel et pris en compte et analysés pour ajuster les projets scientifiques des futures missions.
Il a donc fallu immédiatement finaliser les éléments structurels du robot pour les normes spatiales.
Après le transfert de la première version du robot FEDOR à Roscosmos et au SP Korolev Rocket and Space Corporation Energia (RSC Energia) pour étudier la possibilité de son utilisation dans des programmes habités, les ingénieurs spatiaux de Roscosmos avaient de nouvelles tâches - préparer Robot FEDOR pour une mission spatiale dans un temps assez court.
Le complexe transféré à Roscosmos comprend des éléments: un robot mobile, des panneaux de contrôle, des outils d'intégration et le segment sol.
Besoins d'espace pour les astronautes:
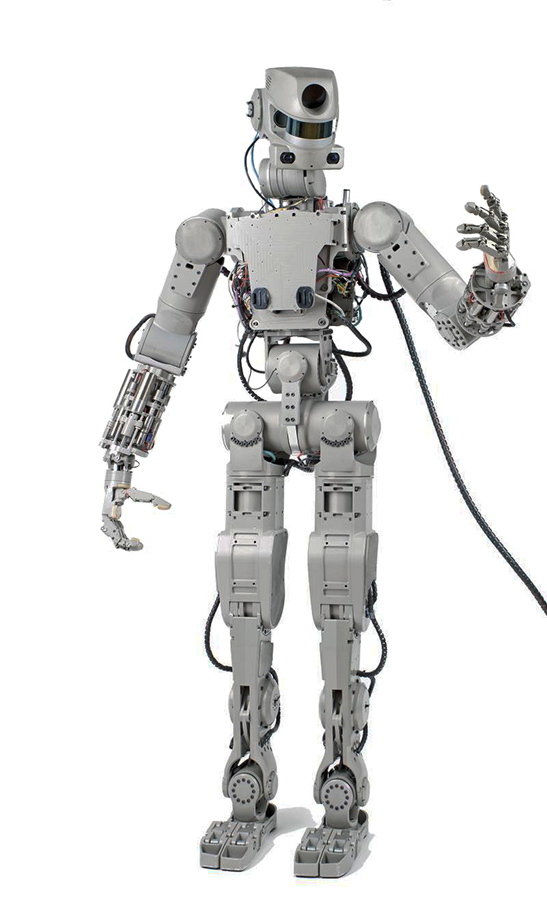
 La version spatiale du robot FEDOR, contrairement à la version civile, a subi des améliorations:
La version spatiale du robot FEDOR, contrairement à la version civile, a subi des améliorations:- poids du robot réduit à 105 kg;
- la ceinture scapulaire a été réduite de quelques centimètres (pour augmenter le jeu le long du diamètre de la trappe, qui était de six à sept centimètres, et lors d'essais, il s'est avéré qu'il n'était pas pratique de la retirer);
- Batterie ordinaire remplacée pour répondre aux exigences de sécurité des vols spatiaux;
- nouveaux disques installés;
- La conception du robot est testée sur un support vibrant.
À l'heure actuelle, tous les systèmes du robot adapté de la version FEDOR-cosmonaute sont opérationnels et prêts pour le vol.
Mais avec l'achèvement de la chaise ordinaire du robot FEDOR, les ingénieurs de RSC Energia ont dû bricoler.

Actuellement, ce problème a été résolu, l'astronaute FEDOR volera vers l'ISS dans le vaisseau spatial Soyouz MS-14 pas dans le logement habituel de l'astronaute (il s'est avéré que ce n'est pas suffisant pour le robot même dans l'état le plus adapté), mais dans un «cadre de chaise» spécialement conçu des alliages d'aluminium, qui protégeront les composants et les mécanismes du robot contre les influences extérieures pendant le vol.
La première version du «cadre de chaise» pour le robot ressemblait à ceci:
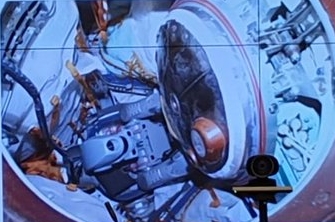
Après avoir accosté à l'ISS, en gravité zéro, les astronautes devront transférer le robot du vaisseau spatial vers l'ISS sans aucune adaptation et continuer à travailler avec lui.Par conséquent, à Roscosmos et RSC Energia, ils essaient de faciliter cette tâche autant que possible et de minimiser le temps de transport du robot au stade du déchargement, et à l'avenir lors de tests dans des conditions spatiales.
En général, le robot anthropomorphe Fedor n'a pas encore embarqué à bord de l'ISS, mais a déjà défini de nombreuses tâches à la fois pour les ingénieurs sur Terre et les astronautes à bord du complexe orbital.
Le lancement du lanceur Soyuz-2.1a avec le véhicule sans pilote Soyuz MS-14 est prévu pour le 22 août 2019. Le vaisseau spatial restera dans l'ISS pendant environ une semaine et demie, puis reviendra automatiquement sur Terre.
Soit dit en passant, dans le cadre de ce vol d'essai, il est prévu de tester l'interaction du système de contrôle numérique des missiles et le "bourrage" analogique du système de sauvetage d'urgence. En cas de problème, le robot doit rester fonctionnel.
Et l'ISS fait maintenant tourner l'équipage.
Le cosmonaute russe Oleg Kononenko, le Canadien David Saint-Jacques et l'Américaine Anne McClain reviendront sur Terre de l'ISS. Ils sont arrivés à la gare en décembre 2018.
Les écoutilles de transition entre l'ISS et Soyouz seront fermées le 24 juin à 23 h 10, heure de Moscou. Le désamarrage de la station est prévu pour le 25 juin 2019 à 22 h 25, l'inclusion des moteurs du navire pour la descente de l'orbite est à 4,54.
Le 20 juillet 2019, il est prévu d'envoyer l'ISS à bord de l'équipage du vaisseau spatial Soyouz MS-13 composé de: Alexander Skvortsov, Andrew Morgan et Luca Parmitano.
Ainsi, Alexei Ovchinin (Russie), Tyler Nicholas Haig et Kristina Koch (tous deux américains) et les trois nouveaux astronautes du lancement de juillet rencontreront des robots FEDOR à l'ISS.
L'astronaute FEDOR est contrôlé de trois manières: par radio, fibre optique ou câble électrique ordinaire.
Non seulement les astronautes à bord de l'ISS pourront contrôler le robot, mais les spécialistes techniques sur Terre, se connectant au robot via un canal de communication externe et utilisant une combinaison spéciale de «contrôle» avec des lunettes 3D pour voir la situation à travers les yeux du robot.
Il est très intéressant de savoir quelles tâches et expériences scientifiques sont prévues et seront effectuées sur l'ISS avec le robot FEDOR.
Bien qu'en 2016, il a été déclaré que le robot FEDOR pourra aller dans l'espace, effectuer des travaux de maintenance et d'autres travaux programmés.
Et après avoir effectué des tests supplémentaires sur la compatibilité électromagnétique du robot sur l'ISS, le canal de communication sera testé et le cosmonaute FEDOR exécutera un ensemble de commandes provenant de la Terre.
