
Un petit robot robotique sans fil volant autonome "Bumble" du projet Astrobee a commencé à subir des tests en vol à bord de l'ISS.
2019 est l'année des robots sur l'ISS. FEDOR n'est pas encore arrivé, mais déjà les tests de combat des robots du projet Astrobee ont déjà commencé.

Deux robots sont déjà à la station - ce sont Bumble et Honey, et en juillet, le troisième robot, Queen, devrait arriver sur l'ISS.

Leurs noms ne sont pas si facilement associés à la miniature et ont une disposition "abeille".
Il s'agit de petits robots autonomes de service spécialement conçus pour fonctionner en apesanteur à l'intérieur des modules ISS, conçus et créés par la
NASA au centre de recherche d'Ames , qui devraient être comme des abeilles pour assumer une partie des tâches spatiales de routine et libérer l'équipage ISS d'actions simples mais fréquentes.
Ainsi, le projet Astrobee est un système de vol libre d'un complexe de robots, dont l'objectif principal est de tester des plates-formes automatisées de petite taille dans des conditions de gravité zéro avec la réception et l'analyse de données en conditions réelles et la possibilité de mettre à niveau et d'améliorer davantage le logiciel et les fonctions des robots pour effectuer des tâches actuelles et nouvelles. sur l'ISS.

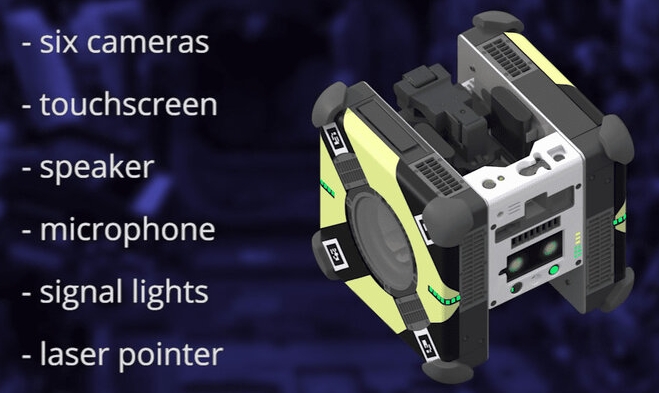
 Caractéristiques des robots du projet Astrobee:
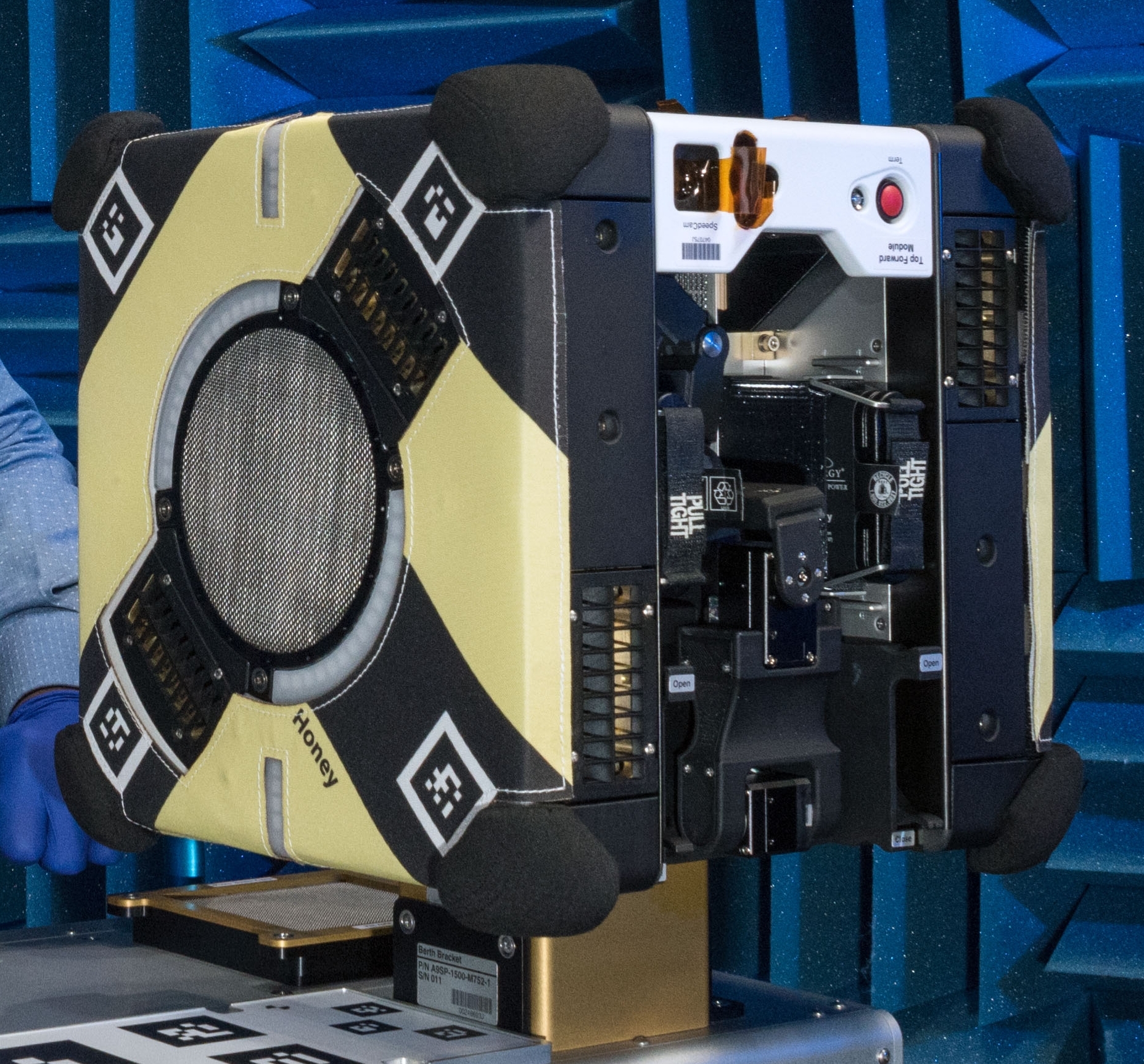
Caractéristiques des robots du projet Astrobee:- la taille d'un robot est de 30x30x30 centimètres (1x1x1 pied);
- le corps du robot est recouvert d'un matériau souple pour minimiser les dommages possibles lorsqu'il heurte un objet ou un élément sur l'ISS;
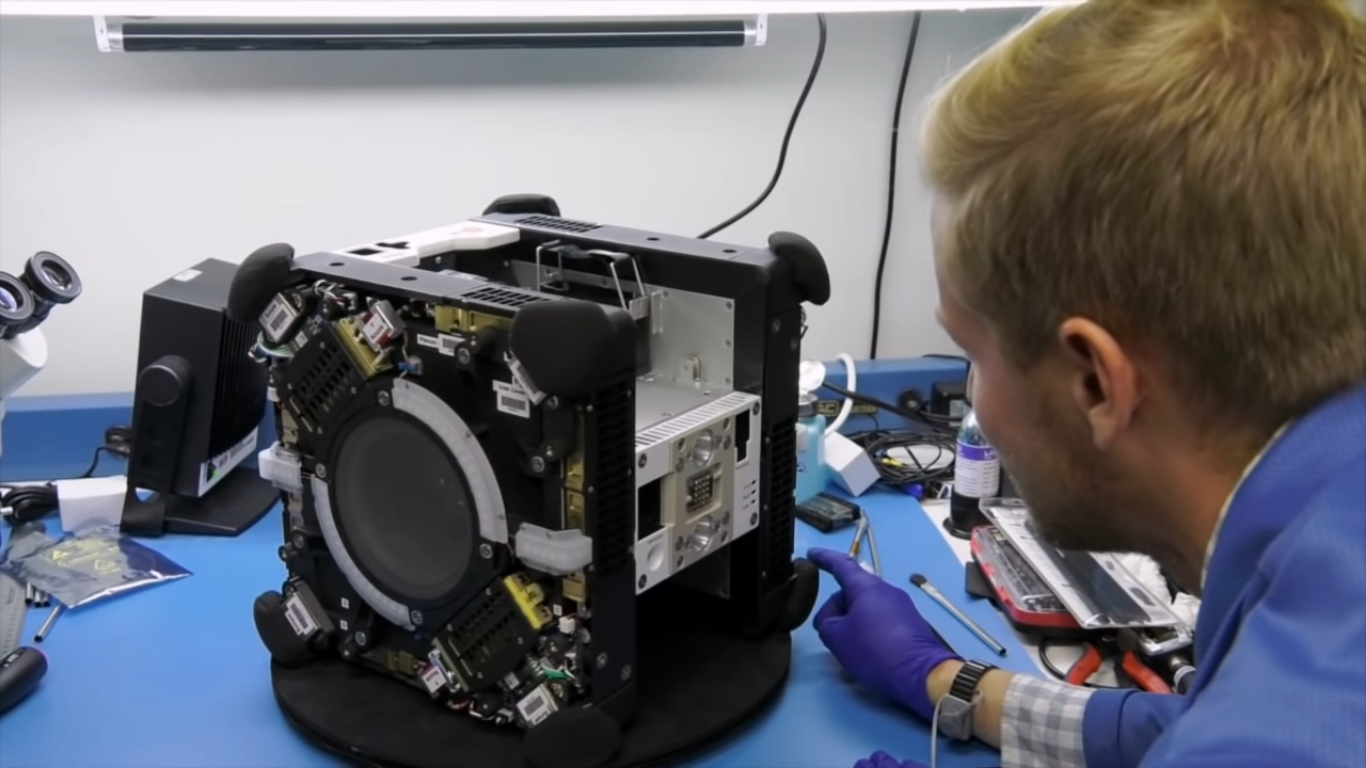
- une partie des faces du robot est conçue pour fonctionner avec de petites charges, il existe même un système pour capturer et fixer des objets avec un manipulateur pliable afin que le robot puisse tenir et déplacer en toute sécurité un objet d'un bout à l'autre de la station, à l'aide de cette capture, le robot peut fixer sa position lorsque nécessaire, attraper des mains courantes ou d'autres éléments de l'ISS;

- les robots ont une station de charge externe distincte, qui sert à charger les batteries des robots et à prendre des données de télémétrie;
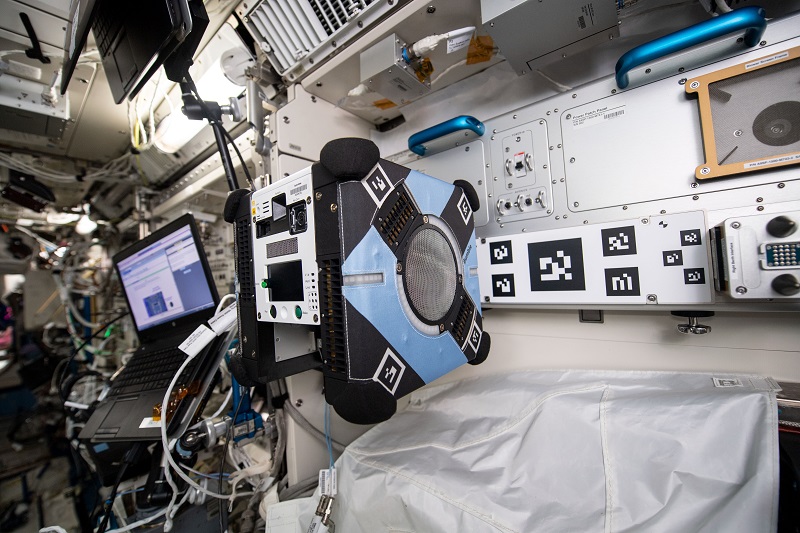

- les robots ne peuvent se déplacer à l'intérieur de l'ISS qu'en gravité nulle que s'il y a une atmosphère dans le module de travail avec le robot, leur système réactif utilise l'air de la station pour se déplacer;
- chaque robot dispose de son propre système de contrôle informatique pour le système de ventilateur embarqué, qui vous permet de capturer et de décharger l'air à travers 12 buses dans la direction opposée au vecteur de mouvement prévu, ce qui permet au robot de se déplacer dans n'importe quelle direction et de voler librement autour de l'ISS sans gravité;
- les ventilateurs du robot sont situés derrière un mur de protection spécial sur les faces de son cube;
- le système informatique du robot fonctionne sous Linux, et le module chargé de travailler avec les objets et de les déplacer fonctionne sur la base d'Android, ce qui vous permet d'étendre rapidement les fonctionnalités du système si nécessaire;
-
lien vers le référentiel github avec le logiciel de projet Astrobee.
- chaque robot a à bord: une caméra de navigation principale avec un champ de vision de 116 °, plusieurs caméras HD avec autofocus capables de transmettre des informations de l'ISS à la Terre en temps réel, et sa caméra embarquée CamBoard Pico Flexx permet au robot de reconnaître des objets et obstacles à une distance de quatre mètres;
-
chaque robot dispose d'un détecteur optique pour déterminer la vitesse et la procédure d'arrêt d'urgence;
- modes de fonctionnement des robots: autonomes, ils peuvent également être commandés à distance, décrocher en toute sécurité, se recharger si besoin, les éteindre.
 Fonctions des robots du projet Astrobee:
Fonctions des robots du projet Astrobee:- la tâche principale des robots est d'aider l'équipage à bord de l'ISS, d'effectuer un certain nombre de tâches de routine afin que le personnel puisse se concentrer sur des tâches plus importantes (mener des expériences et diverses études);
- effectuer un inventaire, documenter les expériences, vérifier les systèmes ISS et déplacer les charges, objets et outils à travers les couloirs étroits de la station et entre les modules;

- effectuer la maintenance des modules ISS en l'absence de personnel ou dans des endroits inaccessibles rapidement à l'équipage;
- surveiller le fonctionnement des systèmes et capteurs de l'ISS;
- surveiller la qualité de l'air, analyser le niveau de concentration de dioxyde de carbone à différents endroits de l'ISS aussi souvent que nécessaire.
 L'histoire de l'apparition des robots du projet Astrobee sur l'ISS:
L'histoire de l'apparition des robots du projet Astrobee sur l'ISS:- La borne de recharge a été livrée à bord de l'ISS le 17 novembre 2018 et a été installée le 15 février 2019;


Le disjoncteur ABB est utilisé:

- Des robots Bumble et Honey ont été lancés de la Terre à l'ISS le 17 avril 2019;

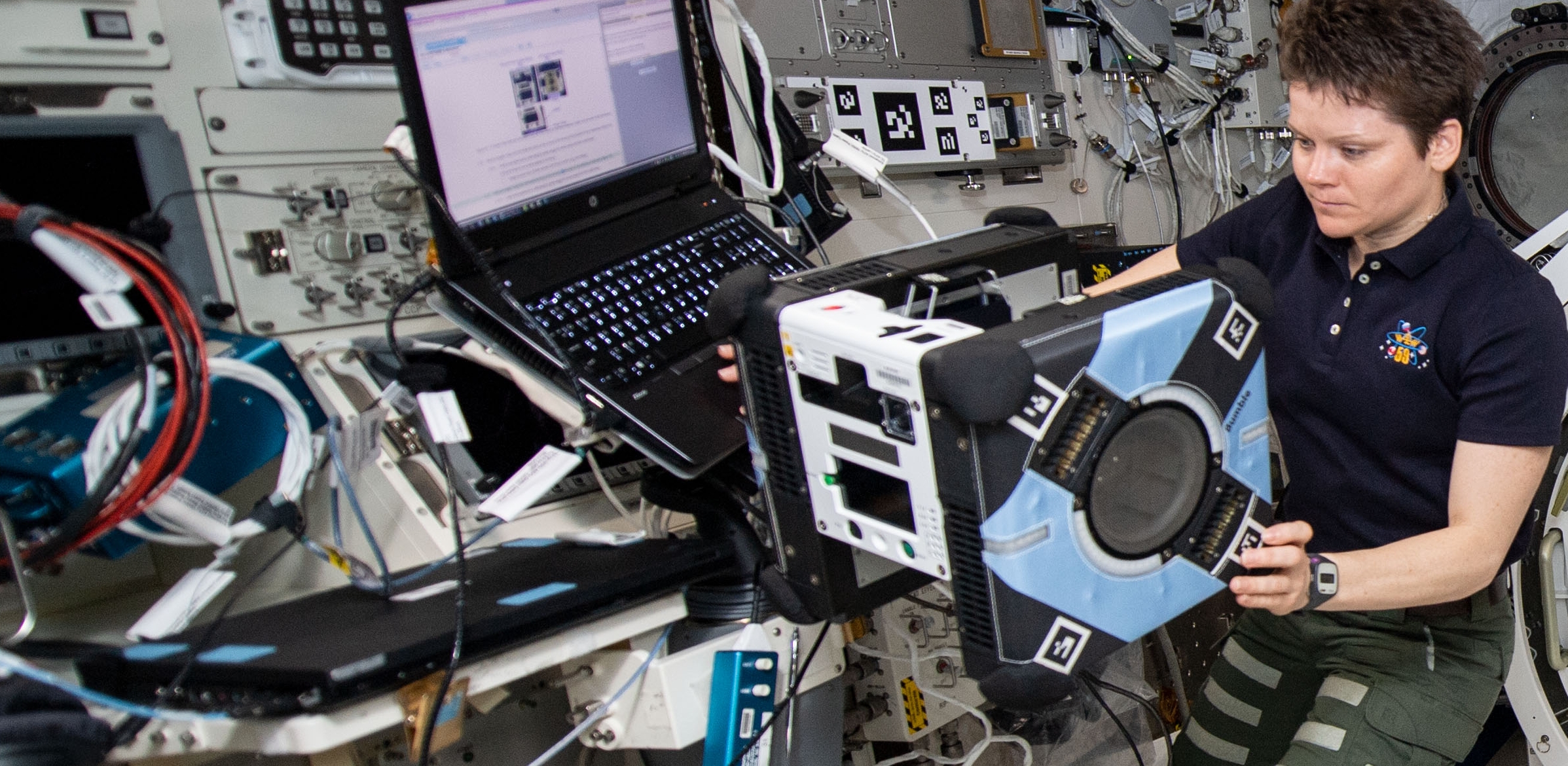
- Le 30 avril 2019, Ann McClain (astronaute de l'ISS) a déballé une boîte avec le robot Bumble et, avec le soutien de l'équipe de développement de la NASA du projet Astrobee, situé au centre de recherche d'Ames, a testé tous les systèmes auxiliaires du robot - avionique, caméras vidéo, systèmes propulsifs, et transfert de données et chargement de ses batteries;





- Le 14 juin 2019, les tests en vol avec le robot Bumble ont commencé;
- Juillet 2019 - le troisième robot Queen devrait arriver sur l'ISS.
À propos du
premier vol du
robot Astrobee
Bumble sur l'ISS:
Le 14 juin 2019, le robot Bumble est devenu le premier robot du projet Astrobee, qui a effectué le premier vol d'essai en gravité zéro.
Avant le premier vol du robot Bumble, l'équipe du projet Astrobee du centre de recherche Ames a vérifié à distance tous ses systèmes embarqués, a reçu la confirmation de la Terre que le robot peut identifier son emplacement et est prêt à naviguer à l'intérieur de l'ISS.
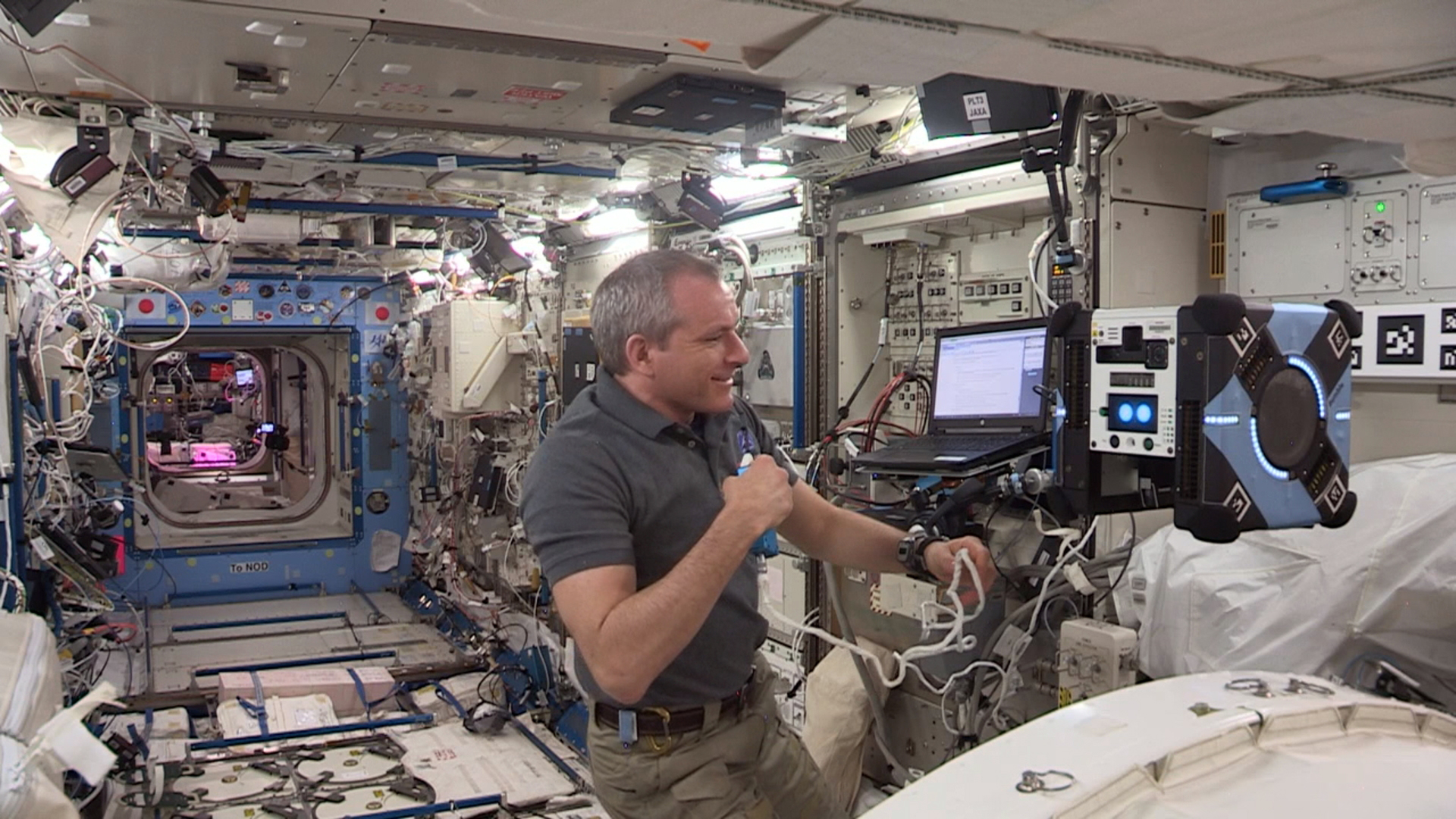
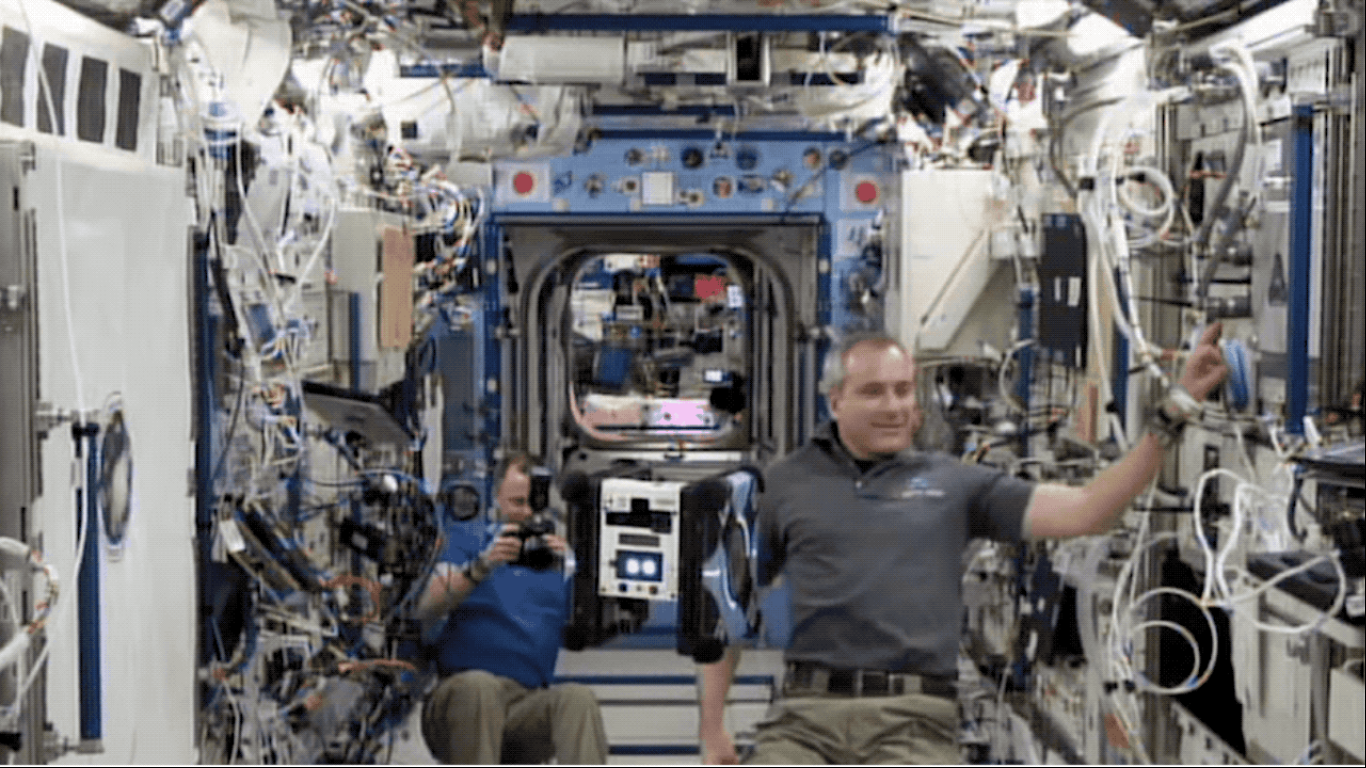
L'astronaute de l'Agence spatiale canadienne David Saint-Jacques a fourni une assistance pratique lors des tests en amont en déplaçant manuellement le robot Bumble à l'intérieur du laboratoire scientifique de l'ISS dans le module Kibo pour permettre au système de navigation du robot de se calibrer dans le nouvel environnement après coup.
Le système de navigation du robot Bumble utilise des caméras à plein temps pour surveiller et surveiller l'espace externe, puis compare les images reçues avec la carte intérieure de l'ISS précédemment chargée dans le robot.

Les robots du projet Astrobe sont conçus pour se déplacer dans toutes les directions et tourner autour de leurs axes dans l'espace à bord de l'ISS.
Ensuite, des tests ont commencé sur le fonctionnement des systèmes de vol du robot Bumble en mode automatique et en mode contrôlé (à distance de la Terre).
Au cours de son premier vol d'essai du robot Bumble, le fonctionnement de ses principaux composants aéroportés a été vérifié et un ensemble de mouvements de base a été effectué, comme «voler de 11,8 pouces (30 centimètres) vers l'avant» ou «tourner de 45 degrés vers la droite», orientation dans l'espace. ISS et ainsi de suite.

La NASA prévoit de continuer à tester les capacités de vol du robot Bumble avec une série de manœuvres de plus en plus complexes pour déterminer dans quelle mesure ses éléments peuvent fonctionner en apesanteur et quels ajustements doivent être apportés au logiciel pour son utilisation ultérieure.
Sur la base des résultats du complexe de ces tests en vol, des paramètres de base seront créés pour le système de propulsion des robots du projet Astrobe, à l'aide duquel il est prévu d'aider les robots Bumble, Honey et Queen à se préparer à assumer les rôles de nouveaux membres d'équipage de l'ISS.
Le premier vol du robot "Bumble" 
