L'une des catastrophes technologiques les plus graves de l'histoire de l'humanité s'est produite le 26 avril 1986. Et puis, cela s'est presque répété le 12 mars 2011. Comme vous l'avez peut-être deviné, nous parlons d'accidents à la centrale nucléaire de Tchernobyl en URSS et à la centrale nucléaire de Fukushima-1 au Japon. La série "Tchernobyl", tournée par HBO, a une fois de plus suscité de l'intérêt pour l'histoire de l'accident de Tchernobyl et a rappelé combien il était difficile d'arrêter le rejet de radionucléides du réacteur détruit dans l'atmosphère. Séparément, ils ont parlé de l'utilisation infructueuse des robots et de l'utilisation forcée de l'aide humaine. Le Japon mène de nombreuses expériences avec une variété de robots qui peuvent retarder la nécessité d'attirer les gens vers l'éradication.
Les accidents survenus à la centrale nucléaire de Tchernobyl et à Fukushima ont des causes différentes et une chronique des événements différente, mais ils ont une chose en commun - la vaste zone autour des centrales est infectée, ce qui les empêche de vivre en sécurité pendant longtemps, et il n'est pas question d'un nettoyage complet des unités de puissance. Dans les deux cas, l'humanité n'était pas prête à faire face aux conséquences - des centaines de milliers de personnes en URSS ont travaillé à la décontamination de la zone d'exclusion et à la construction d'un sarcophage protecteur sur le réacteur. Au Japon, ils sont allés dans l'autre sens.
Référence: normes d'exposition
La phrase sur le fond de rayonnement de la série de Tchernobyl a réussi à devenir un mème sur Internet étranger: "3.6 Les rayons X ne sont rien de bon, mais pas terrible." En effet, vaut-il la peine d'avoir peur de ces mêmes 3,6 rayons X par heure, ou n'est-ce pas vraiment un fond terrible? Afin de mieux comprendre les mesures de Fukushima données dans le post ci-dessous, vous devez d'abord comprendre l'échelle des doses et leur effet sur le corps.
Les rayons X (P), bien connus des Russes, sont une unité de mesure obsolète du fond de rayonnement qui n'est pas incluse dans le système SI. Maintenant Sievert (Sv) est utilisé à la place. Autrement dit, 1 Sv est égal à 100 R. Autrement dit, 3,6 R / h est 0,036 Sv / h ou 36 mSv / h. En Russie, dans certains instituts de recherche, vous pouvez voir un panneau avec le fond actuel, mesuré en rayons X. En moyenne, le milieu urbain de notre pays fluctue au niveau de 12-20 μR / h ou 0,12-0,2 μSv / h. Une personne reçoit une dose d'environ 2,4 mSv par an du fond de rayonnement naturel de notre planète (selon le pays et l'altitude). Ce rayonnement vient de l'espace, vient du sol, de l'eau, est présent dans l'air, grâce au radon.
Et maintenant, un petit tableau avec les doses que nous recevons tout au long de notre vie (la seule exposition indiquée ci-dessous est la réception de la dose appropriée pendant jusqu'à 4 jours):


Revenons aux 3,6 R / h mentionnés dans la série. 0,036 Sv / h (36 mSv / h) n'est vraiment pas un arrière-plan terrible en cas d'accident, pour le développement d'une légère radiothérapie, il est nécessaire de rester dans la zone de danger pendant plus d'une journée, et les travaux de réparation pendant plusieurs heures sont assez sûrs et acceptables. Et maintenant, nous nous souvenons comment un peu plus tard, ils ont dit dans la série que le bruit de fond au réacteur n'était pas 3,6, mais 15 000 rayons X (150 Sv / h). Quatre minutes dans un tel contexte entraînent une mort inévitable. Après deux minutes, seuls les soins médicaux qualifiés les plus rapides peuvent donner une chance de salut, et 25 secondes suffisent pour attraper le mal des radiations.
Toshiba à Fukushima
Le partenariat entre Toshiba et la Tokyo Energy Company (TEPCO) a débuté dès la phase de construction de la centrale nucléaire de Fukushima-1. Toshiba était responsable de la construction des réacteurs de type BWR pour les troisième et cinquième unités de puissance, mises en service respectivement en 1976 et 1978. Parmi les avantages des réacteurs BWR, il y a une pression de vapeur plus faible dans le circuit primaire que, par exemple, le VVER soviétique, et des températures de fonctionnement plus basses. Les inconvénients incluent la complexité de fabrication, la nécessité d'un boîtier de très grande taille, la complexité du contrôle et de la radiolyse dans les éléments combustibles, ce qui entraîne la génération d'hydrogène explosif.
Si l'accident de la centrale nucléaire de Tchernobyl a été causé par le manque de conception du réacteur RBMK, qui s'est fait sentir lors des violations lors des essais, alors deux catastrophes naturelles ont provoqué l'incident de Fukushima. Un tremblement de terre d'une magnitude record de 9,0 à 9,1 a entraîné la fermeture des réacteurs, et le tsunami qui a suivi a inondé le territoire de Fukushima-1 et des générateurs d'urgence alimentant les pompes de refroidissement du réacteur. Les réacteurs de la station, qui même en cas d'arrêt d'urgence, ne refroidissent pas immédiatement, sont restés sans afflux d'eau froide, ce qui l'a amenée à bouillir, à augmenter la pression de vapeur et la température à l'intérieur, à générer de l'hydrogène en raison du contact de la vapeur avec le zirconium dans les éléments combustibles (réaction vapeur-zirconium) et son explosion subséquente . Dans les première, deuxième et troisième unités de puissance, le cœur du réacteur a fondu et du combustible nucléaire a fui. À Fukushima, les radionucléides se jettent dans l'océan avec l'eau de refroidissement; à la centrale nucléaire de Tchernobyl lors d'un incendie, ils sont entrés dans l'atmosphère et se sont répandus dans toute l'Europe.
 Chronique de ce qui s'est passé dans trois unités de puissance. La quatrième unité de puissance a également été touchée, mais il n'y avait pas de combustible nucléaire dans son réacteur, il n'y a donc eu qu'un incendie. Source: Roulex_45 / Wikimedia
Chronique de ce qui s'est passé dans trois unités de puissance. La quatrième unité de puissance a également été touchée, mais il n'y avait pas de combustible nucléaire dans son réacteur, il n'y a donc eu qu'un incendie. Source: Roulex_45 / Wikimedia
Afin d'éliminer l'accident de Fukushima, il est nécessaire de compiler une carte des dommages, de trouver le combustible fondu et ses points de fuite, de retirer le combustible nucléaire irradié des réacteurs et des bassins de stockage, de démonter les décombres - c'est-à-dire d'effectuer un travail énorme sous un fond de rayonnement tout aussi colossal. Maintenant, ce travail au FAES est effectué par des robots et des voitures télécommandées - envoyer des personnes dans la zone d'accident est trop dangereux, à certains endroits de la gare, l'arrière-plan peut tuer une personne en quelques minutes.
Toshiba et l'Institut international de recherche pour le déclassement des réacteurs nucléaires (IRID) sont engagés dans le développement de robots pour des tâches spécifiques - inspection des unités de puissance de Fukushima et décontamination (nettoyage) des chambres contre la contamination radioactive. Nous parlerons de certains des robots Toshiba les plus notables qui ont apporté leur petite mais importante contribution à la cause de l'accident.
Soit dit en passant, il existe une opinion erronée selon laquelle la liquidation de Fukushima n'a pas tenu compte de la précieuse expérience de Tchernobyl. C'est fondamentalement faux. Immédiatement après l'accident, un groupe d'experts nippo-russes dans le domaine de l'énergie nucléaire a été créé pour faire face aux conséquences de l'accident de Fukushima-1. dans l'étude des conditions de rayonnement et de la construction du sarcophage. Après l'accident au Japon, Larion Lebedev a amélioré la technologie de séparation du tritium de l'eau radioactive, ce qui nous a permis de commencer à nettoyer les énormes volumes d'eau lourde restants après le refroidissement des réacteurs détruits. Au nom du gouvernement japonais, Larion Alexandrovich a reçu l'Ordre du Soleil Levant, décerné pour ses mérites militaires et civils.
Scout à quatre pattes
Le premier robot Toshiba à entrer dans le FAES était le drone à quatre pattes sans nom, dont le développement a commencé immédiatement après l'accident. Sa mission, comme tous les robots lancés dans la centrale électrique dans les premières années, était la reconnaissance des radiations et l'évaluation des dommages à l'intérieur des unités de puissance.
Un dosimètre et six caméras ont été installés sur le châssis pour inspecter les locaux de la station. L'électronique protégée a été conçue pour fonctionner avec un rayonnement de 100 mSv / h pendant un an (avec une journée de travail de 10 heures) et avec un fond beaucoup plus large pendant de courtes périodes. Certes, une seule charge de batterie n'était suffisante que pour 2 heures d'existence autonome. Le robot s'est déplacé à une vitesse d'environ 1 km / h, ce qui est suffisant lors de l'examen d'une unité de puissance détruite. La gestion a été effectuée en direct avec redondance en cas d'interférence.
Au bas de l'appareil, un petit drone de reconnaissance était attaché, qui pouvait se détacher de son porteur et ramper dans des endroits étroits où un grand robot ne pouvait pas passer. Il était censé être utilisé pour rechercher des fuites d'eau de refroidissement sous la tuyauterie du réacteur.
Cela ne veut pas dire que de grands espoirs étaient mis sur le robot: même au stade de la démonstration, les journalistes ont souligné la lenteur de la machine - il fallait jusqu'à une minute pour monter chaque marche de l'échelle, et lors de la pose du pied sur une surface instable, le robot pouvait basculer sur le côté.
Cependant, le premier mécanisme expérimental Toshiba pour le FAES a quand même réussi à pénétrer le bâtiment de la deuxième unité de puissance et à effectuer une petite reconnaissance. TEPCO a publié un rapport le 11 décembre 2012. Le robot a pris des photos de l'un des tuyaux, confirmant l'absence de fuites. En mars 2013, il est entré cinq fois de plus. Mais bientôt, en essayant d'inspecter davantage les lieux, le robot a perdu l'équilibre dans les escaliers et est tombé sur le côté. En raison de l'absence d'un mécanisme de rotation, l'éclaireur à quatre pattes est resté couché dans le deuxième bloc.
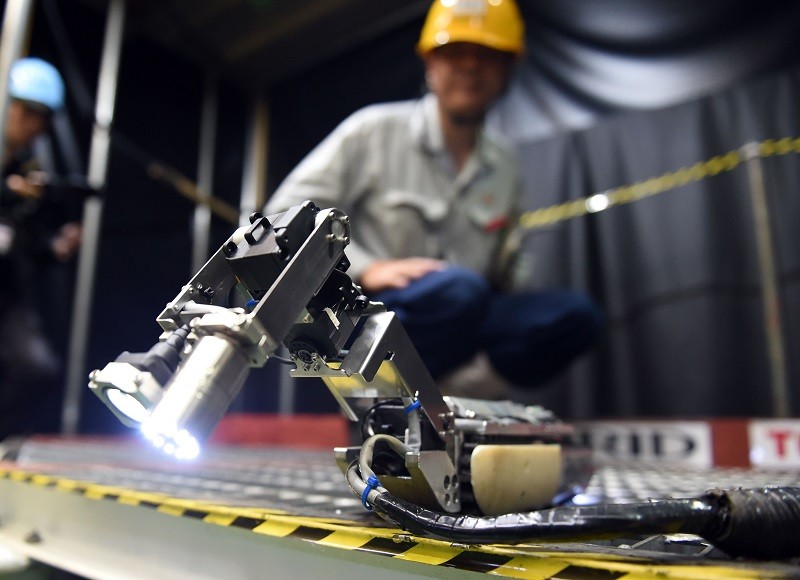
Scorpion explorateur pliant
Le prochain robot de la société, qui tenait compte de toutes les lacunes du modèle précédent, était le Toshiba Scorpion, ainsi nommé pour sa forme (photo de titre). Il a été développé pour une tâche très difficile - étudier le fond du réacteur et rechercher des crayons combustibles, et cette mission implique de travailler avec un énorme fond de rayonnement. Scorpion a été épargné les jambes, qui ont été remplacées par des chenilles, et pour la compacité, la conception était pliante - la voiture était censée être jetée dans le réacteur par les passages pour le chargement des crayons de combustible. En mode de fonctionnement, le robot soulève son manipulateur de queue, se déplaçant selon trois axes à la manière d'un scorpion, au bout duquel une caméra et des LED de rétro-éclairage sont adaptées à la place de la piqûre. Une autre caméra est montée à l'avant et regarde toujours vers l'avant.
Le Scorpion est contrôlé par l'opérateur via un câble, il n'y a donc aucun problème de transmission de puissance et de signal. De plus, le robot est rendu récupérable, il ne doit pas rester dans le réacteur après la transmission du témoignage. Le faire basculer n'a pas peur, la «queue» avec la caméra ramène le robot à sa position normale.
Pendant plusieurs années, Scorpion a été finalisé pour enfin pénétrer à l'intérieur du FAES - au fil du temps, il a reçu un petit canon à eau pour dégager le chemin, un seau et un cutter pour travailler avec du corium. En février 2017, le robot s'est rendu au réacteur, où il a mesuré l'arrière-plan et tourné une vidéo. Le dosimètre a montré un impressionnant 210 Sv / h (21 000 R). Dans la pièce suivante, où des travailleurs chargeaient le robot dans le tuyau, le bruit de fond était de 6 mSv / h.
ROV: petit sous-marin
 Un petit sous-marin avec des caméras vidéo, qui ont de grandes attentes. Source: Toshiba
Un petit sous-marin avec des caméras vidéo, qui ont de grandes attentes. Source: Toshiba
Un outil sous-marin télécommandé, ou ROV pour faire court, est le premier robot flottant Toshiba construit pour étudier le réacteur de la troisième unité de puissance, dont la partie inférieure est cachée sous une colonne d'eau de six mètres. Ce petit sous-marin avec des dimensions de 30 x 13 cm et pesant 2 kg transporte deux caméras et un rétro-éclairage, est contrôlé par câble et peut se déplacer sous l'eau dans toutes les directions avec une grande précision. L'appareil est contrôlé par l'opérateur, et le signal et l'alimentation sont fournis via un long câble. Pour empêcher le fil de s'emmêler et de s'accrocher aux débris, Toshiba a développé un revêtement spécial avec une friction minimale, et deux moteurs puissants ont été installés sur le ROV lui-même, afin que le robot puisse facilement faire glisser le câble avec lui.
À propos, le diamètre du ROV de 14 cm était dû à une entrée étroite dans la cuve du réacteur de la troisième unité de puissance, les ingénieurs Toshiba ont donc dû travailler dur pour intégrer l'électronique, la protection et les moteurs dans un boîtier aussi compact. Au terme d'une formation intensive de deux mois pour les opérateurs, Toshiba ROV est allé au FAES. Le robot a visité le réacteur les 19, 21 et 22 juillet 2017 et a inspecté avec succès les entrailles détruites.
SC-ROV magnétique
Un autre endroit inaccessible dans lequel l'eau avec des radionucléides s'est accumulée était les chambres de décharge de pression toroïdales situées sous le réacteur. Il était nécessaire d'envoyer un robot pour rechercher des fuites sous la caméra, mais la question était compliquée par le fait que l'enceinte était inondée - le robot devait inspecter les tuyaux immergés dans de l'eau boueuse. Les dispositifs flottants n'étaient pas adaptés à cela, une sonde était nécessaire qui serait fixée sur le tuyau et capable de se déplacer le long de celui-ci sans glisser, même à un grand angle.
Comment fixer le robot sur un tube en acier pour qu'il ne roule pas? Avec l'aide d'aimants. Le SC-ROV de Toshiba a été spécialement conçu pour la chambre de décompression. Il s'agit d'un châssis avec des roues faites d'aimants puissants en néodyme. À l'aide de quatre caméras et d'un marqueur, l'opérateur peut se déplacer le long de la surface d'un tuyau immergé sous l'eau et marquer les trous trouvés.
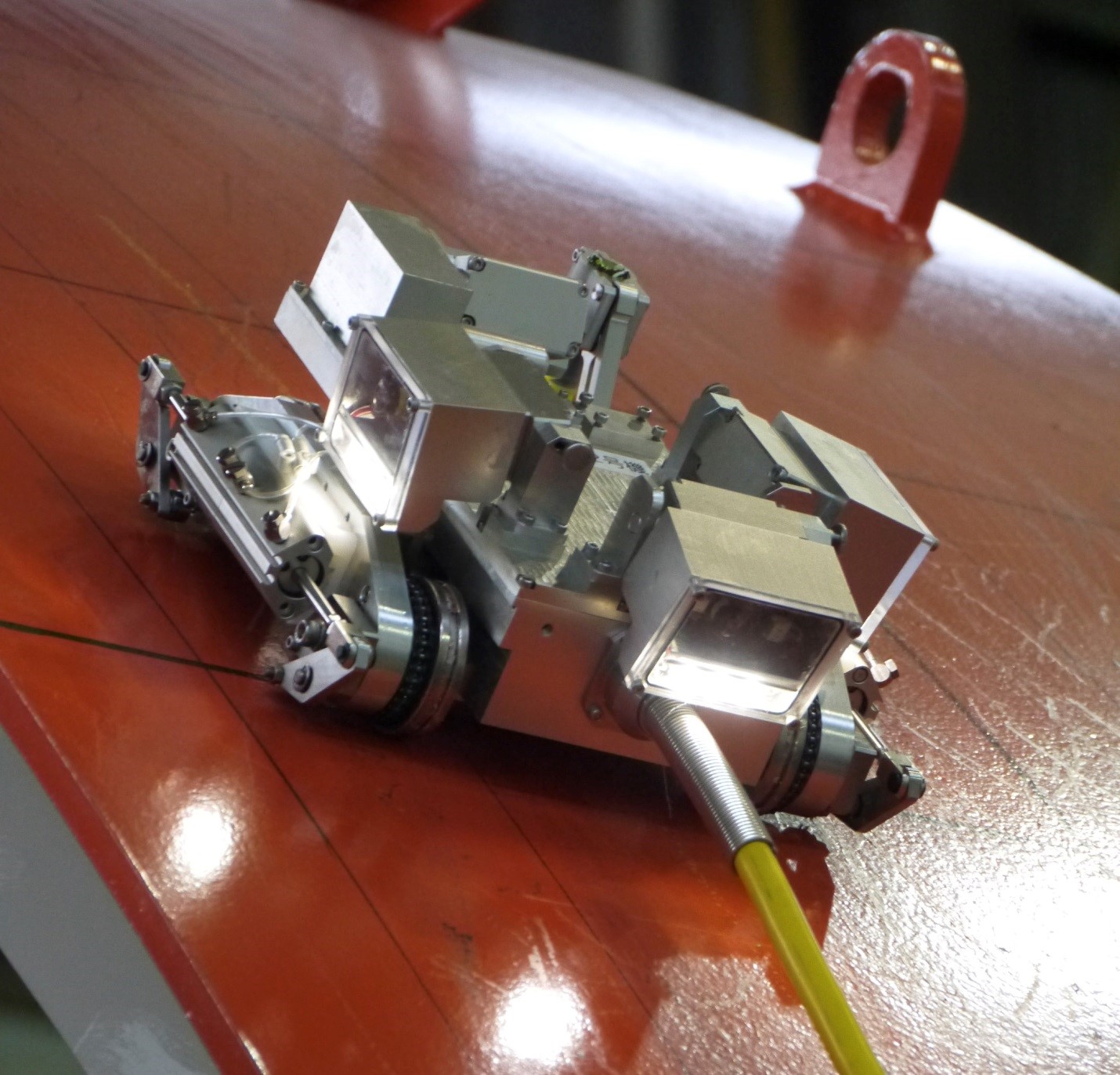 Pendant la démonstration, le SC-ROV a parfaitement maintenu les aimants sur la surface inclinée. Mais les conditions réelles étaient beaucoup plus difficiles. Source: IRID
Pendant la démonstration, le SC-ROV a parfaitement maintenu les aimants sur la surface inclinée. Mais les conditions réelles étaient beaucoup plus difficiles. Source: IRID
Selon les résultats du SC-ROV en 2014, aucune fuite n'a été trouvée, mais des problèmes ont été décelés dans le fonctionnement de l'appareil. Tout d'abord, en raison de la turbidité de l'eau, la portée de visibilité n'a pas dépassé 30-35 cm, ce qui a considérablement ralenti la recherche. Deuxièmement, en raison de certains défauts de la surface du tuyau, le robot en a néanmoins glissé lorsqu'il a été incliné à 120 °.
Caméra de recherche Corium
Les missions de recherche précédentes ont montré une image déprimante - le combustible nucléaire dans le réacteur de la deuxième unité de puissance a dépassé la cuve du réacteur. Les photographies de la grille fondue au fond de l'enceinte de confinement montrent clairement que le carburant se trouve déjà quelque part au fond. Mais le confinement l'a-t-il retenu ou le corium s'est-il enfoncé dans le sol? Il fallait envoyer un nouveau robot dans l'enfer même de l'ancien réacteur au combustible incroyablement décoloré.
 La grille fondue à l'intérieur de l'enceinte de confinement du deuxième réacteur est exactement au-dessus de l'entraînement des barres du système de contrôle et de protection. Source: TEPCO
La grille fondue à l'intérieur de l'enceinte de confinement du deuxième réacteur est exactement au-dessus de l'entraînement des barres du système de contrôle et de protection. Source: TEPCO
Les robots sur chenilles ne fonctionnent que sur un sol plat et un sous-marin a besoin d'une épaisseur d'eau. Toshiba a proposé une caméra de téléconduite montée à l'extrémité d'un tube télescopique de cinq mètres. Quel que soit l'angle d'entrée du tuyau dans l'enceinte de confinement, la caméra prend une position strictement verticale - l'unité principale est maintenue par un câble de commande, c'est-à-dire que la caméra semble "accrochée au fil". Son objectif pivote à 360 ° horizontalement et 120 ° verticalement. En fait, il y a deux caméras sur l'appareil à la fois - fonctionnant directement et une caméra pour l'orientation. En plus des lentilles, un rétro-éclairage, un dosimètre et un thermomètre sont installés sur l'appareil. L'appareil résiste à la dose absorbée jusqu'à 1000 gris.
La première version de la caméra a fonctionné à Fukushima en janvier 2018, où elle a réussi à trouver le corium et à mesurer l'arrière-plan à 530 Sv / h (53000 rayons X). Mais le travail ne s'arrête pas là - il faut prélever des échantillons pour analyse. Dans la version mise à jour de l'appareil, le rétro-éclairage a été amélioré et un bras coulissant a été ajouté. En février 2019, la caméra télécommandée Toshiba a d'abord reçu un échantillon de corium de la deuxième unité d'alimentation.
Machine de nettoyage
Les locaux des unités de puissance devront être désactivés tôt ou tard, mais vous devez d'abord établir une carte de la pollution. Les résultats de nombreuses missions de recherche ont montré un tableau très sombre: contrairement aux attentes, la plupart des radionucléides ne se sont pas installés au sol ou sur les murs, mais sur les éléments supérieurs, tels que les canalisations et la ventilation - ils ont représenté jusqu'à 70% de tous les rayonnements. La décontamination du sol est relativement simple, les murs sont un peu plus compliqués, mais comment accéder à la saleté au plafond et aux subtilités des tuyaux, étant donné que la hauteur des plafonds du premier étage est de 7 à 8 mètres?
 Le «nettoyant» pour radionucléides Toshiba - culmine à 8 mètres de hauteur et gratte avec diligence les murs. Source: IRID
Le «nettoyant» pour radionucléides Toshiba - culmine à 8 mètres de hauteur et gratte avec diligence les murs. Source: IRID
Toshiba a développé un robot utilisant un canon avec de la glace carbonique - de la poudre de glace recouvre la surface, lie les particules radioactives, et le robot la gratte et s'absorbe. Le mécanisme élève la structure à une hauteur de 8 mètres. Puisqu'il s'agit d'une autre machine télécommandée, son opérateur reçoit une image de 22 caméras en même temps. La machine a commencé à nettoyer les unités motrices en janvier 2016. Sa productivité est faible, mais même une petite contribution à la décontamination de la station est précieuse.
Aide mais pas solution
33 ans se sont écoulés depuis l'accident de la centrale nucléaire de Tchernobyl, depuis lors, la technologie a fait une percée considérable. Désormais, des dizaines de robots et de types d'équipements de construction télécommandés participent à l'élimination des conséquences à Fukushima. Le site Web de TEPCO a publié de nombreux rapports, dont les données dans leur ensemble forment une image très triste: il y a des robots et des technologies, mais ils ne sont pas tous proches de l'efficacité des liquidateurs de Tchernobyl. Le développement et le test des robots prennent des mois et des années, et le résultat de leur travail est l'avancement d'une dizaine de mètres, la collecte de données dosimétriques, une vidéo boueuse et la fin fréquente des missions en raison de problèmes imprévus.
Chaque robot à Fukushima est un peuple sauvé, et chaque vie humaine en vaut la peine pour s'engager dans le développement de robots. Mais les plans actuels de TEPCO indiquent clairement que, selon des estimations prudentes, il faudra au moins 30 à 40 ans pour faire face aux conséquences de l'accident. Et cela ne fait que confirmer l'héroïsme et l'ampleur de l'exploit des liquidateurs soviétiques de Tchernobyl.