Dans un
article précédent sur la conception orientée modèle , il a été démontré que toutes les techniques ne sont pas également utiles. Et il explique comment le faire correctement, afin que ce ne soit pas atrocement douloureux. Mais à la fin de l'article, la question a été posée, provocante car Sharon Stone a été interrogée par les enquêteurs: la conception orientée modèle est certes bonne, mais comment prouver que le modèle correspond à l'objet? Quelle est votre preuve?
Une réponse générale à cette question est en cours de préparation, mais je peux vous donner un exemple réel et frais sur une question en ce moment. Il m'est apparu ici, comme toujours par accident, le texte du principal spécialiste de notre pays sur la propulsion électrique Kalachev Yuri Nikolaevich, auteur du livre
Modélisation dans une propulsion électrique. Instructions pour comprendre. avec son aimable autorisation de publier. Ce texte est en cours de préparation pour publication dans des publications spécialisées, mais les lecteurs de l'Habrir le verront en premier.
Plus loin sous la coupe
Kalachev Yu. N., Lantsev V.Yu., Okulov E.V.Moteur CC sans balais
(pratique de l'application de la modélisation et de la génération de code chez Aeroelectromash JSC)Vive, camarades !!! C'est arrivé !!!
Enfin, nous avons vu les fruits des tendances progressives croître dans l'industrie des moteurs nationaux.
L'article discute de la technologie de conception d'un entraînement électrique en utilisant la simulation et la génération de code. (Conception orientée modèle correcte )
Quant à la modélisation, ce n'est pas un nouveau problème pour nos pilotes. Mais peu de gens ont essayé la génération automatique de code du programme du variateur de vitesse à partir de son modèle, et à l'échelle mondiale. ...
Nous osons affirmer que cette tendance utile (écriture automatique d'un programme par un autre programme) se développera activement dans le futur monde numérique ... Celui qui commence plus tôt gagnera.
Nous voulons faire une réservation pour que la génération de code, à notre avis, n'annule pas et ne remplace pas le programmeur, mais l'aide simplement. Dans ce cas, bien sûr, nous pensons que le code SI du programme généré doit lui être ouvert.
C'est ce que nous faisons, le résultat de la génération automatique de code est le code C, ouvert pour la visualisation et l'analyse.
Dans notre cas, l'objet de contrôle était un certain entraînement électrique avec un moteur à courant continu sans balai (BDT), dont l'arbre est connecté à une boîte de vitesses qui transforme la rotation en mouvement de translation de la tige.
La tâche de l'entraînement électrique est assez standard - pour positionner l'arbre de la tige, de préférence plus rapidement et plus précisément ... Souvent, ces entraînements sont utilisés pour contrôler les gouvernails des véhicules aériens sans pilote.
L'unité de commande de l'appareil a été conçue et fabriquée dans le département de l'entraînement électrique d'Aeroelectromash JSC sur la base du microcontrôleur 19861 (PKK Milander JSC). Il était nécessaire de créer des algorithmes et un programme de contrôle du contrôleur afin de les utiliser davantage dans des problèmes pratiques.
Le travail a été réalisé conjointement par des spécialistes de la société de service 3V et des employés du département d'entraînement électrique d'Aeroelectromash JSC.
La première tâche à laquelle notre équipe a été confrontée a été l'identification de l'objet de contrôle. Pour cela, certaines mesures des caractéristiques du moteur ont été effectuées, qui se sont avérées assez spécifiques.
Par exemple, l'EMF du moteur mesuré avait une forme très bizarre, illustrée à la figure 1. <br?

Figure 1. Moteur EMF mesuré.
Si le lecteur est familier avec le programme Simulink, alors il sait que là, dans le modèle du moteur à constantes et aimants, il y a le choix d'une EMF sinusoïdale ou trapézoïdale.
Eh bien, et où aller chez le pauvre paysan? Où est le sinus ici, et où est le trapèze? (Les bons outils de modélisation doivent être ouverts!). Dans l'environnement SimInTech, même de telles imperfections du moteur peuvent être prises en compte. Nous avons défini la forme EMF indiquée sur la figure 2

Figure 2. Moteur EMF créé dans SimInTech
Trouvez les deux différences dans les Fig.1 et Fig.2. Nous avons trouvé une chose - la couleur.
La caractéristique suivante du moteur s'est avérée être son moment de dent important, en raison de la géométrie du circuit magnétique du stator et de l'absence de biseautage des rainures des aimants du rotor. Le moment a été mesuré expérimentalement et introduit dans le modèle. Le graphique du moment de la dent est illustré à la Fig.3.

Figure 3. Moment de griffe.
De plus, les pertes d'aimantation ont été prises en compte dans le modèle de moteur, qui est absent dans les modèles mathématiques d'autres développeurs de programmes de simulation.
En outre, le fonctionnement de l'entraînement électrique a été comparé aux résultats de simulation dans les modes de test. Ci-dessous sur la Fig. Les figures 4 et 5 montrent les résultats d'un test de ralenti (fréquence maximale sans charge).

Figure 4. Ralenti. Vrai moteur.

Figure 5. Courant de phase au repos. Résultat de la simulation.
Conclusion:
Les oscillogrammes du ralenti réel et du modèle coïncident. Visuellement, la différence n'est pas visible.
Après un essai de ralenti réussi, un essai d'impact dynamique a été effectué sur un moteur avec une boîte de vitesses attachée. Dans cette expérience, une tension constante a été appliquée aux enroulements du moteur avec un inverse à une fréquence de 30 Hz. Dans ce cas, la liaison de sortie a oscillé avec la même fréquence. La figure 6 montre les résultats de cette expérience:
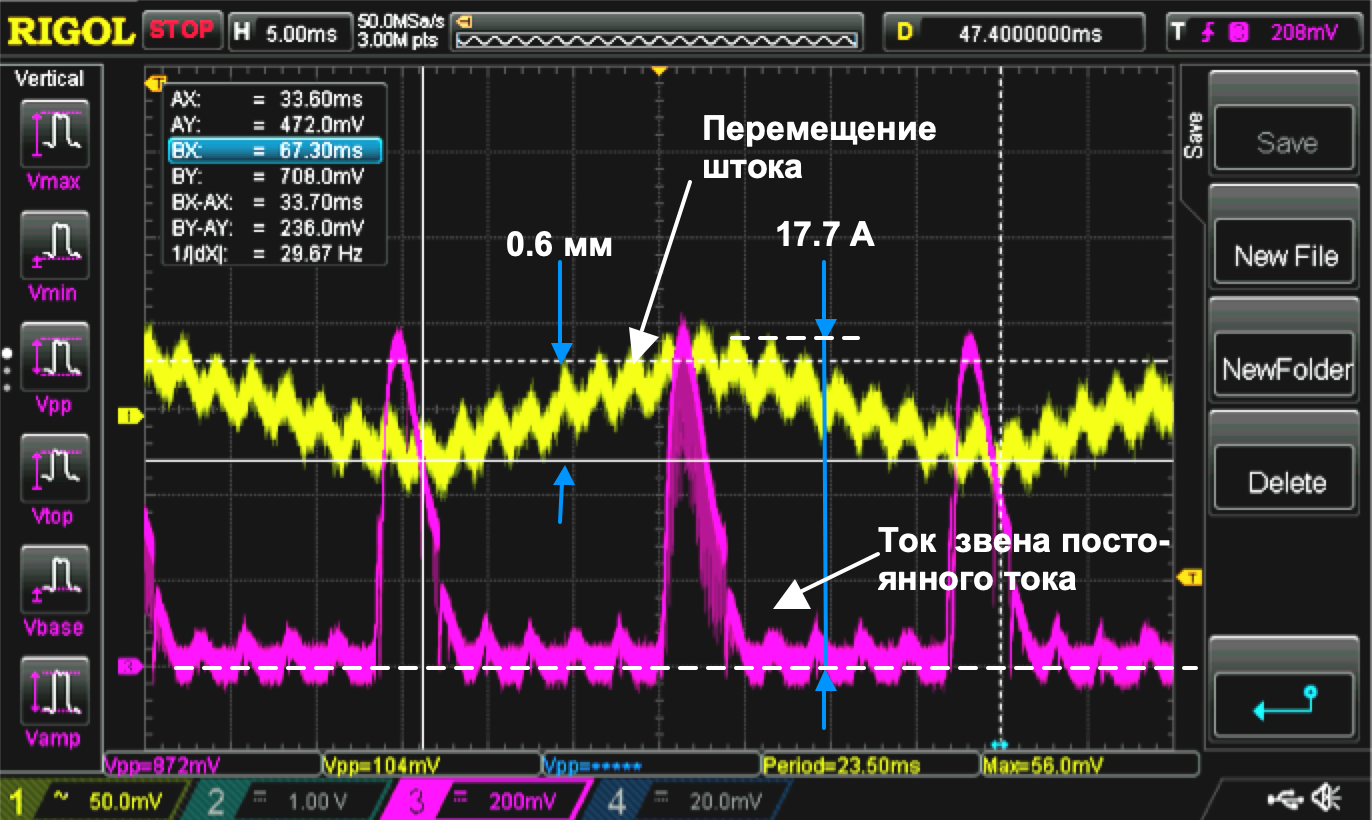
Figure 6. Moteur réel sous charge
(Les signaux ont été filmés avec des interférences. La gigue et le flou à haute fréquence sont des interférences dans les signaux des capteurs de position et de courant).
Les données obtenues ont été comparées à un modèle d'entraînement fonctionnant dans un mode similaire (Fig. 7).

Figure 7. Modèle sous charge
Conclusions:
- Les mouvements de la tige en réalité et sur le modèle coïncident complètement
- Les valeurs de crête du courant moteur réel et du modèle coïncident avec une précision de l'erreur de mesure.
Le type du modèle vérifié de la puissance et des pièces mécaniques de l'entraînement électrique construit sur des éléments de bibliothèque standard du programme SimInTech est illustré à la Fig.8.
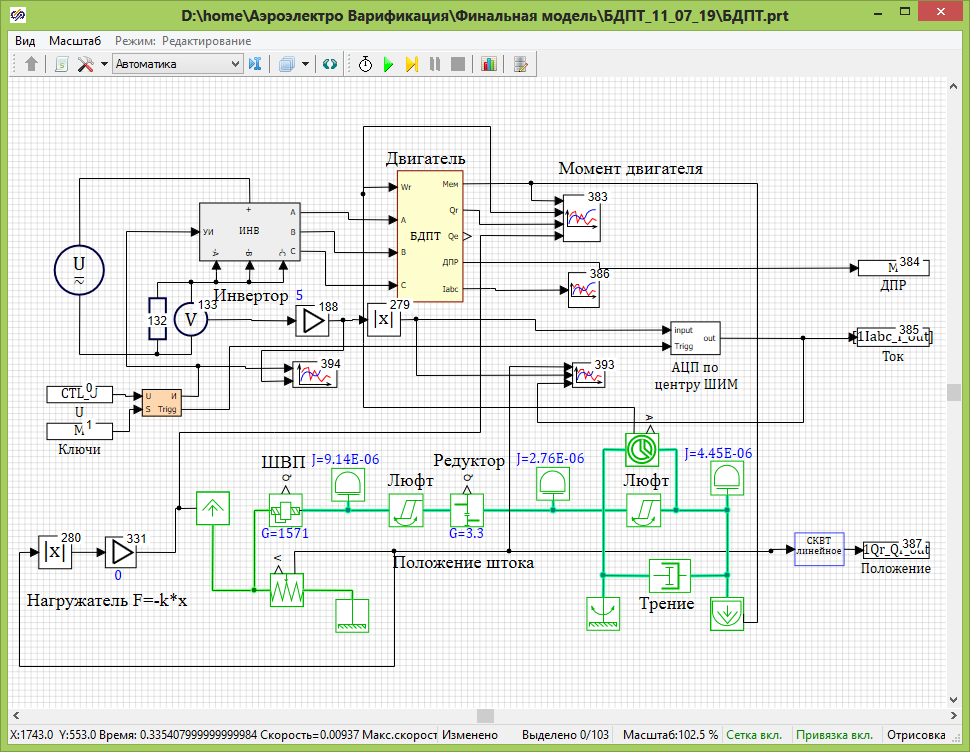 Figure 8. Schéma d'un modèle complexe d'un entraînement électrique, y compris la partie mécanique.
Figure 8. Schéma d'un modèle complexe d'un entraînement électrique, y compris la partie mécanique.Il se compose de modèles:
- onduleur
- moteur avec capteur de position du rotor (DPR)
- transmission mécanique
- capteur de courant
- chargeur
Après vous être assuré que le comportement du modèle correspond au comportement d'un produit réel, selon les résultats de la simulation, vous pouvez sélectionner la structure nécessaire du système de contrôle (CS) et la configurer pour les différents types d'entrée répertoriés dans la tâche technique.
Dans notre cas, de bons résultats ont été montrés par un système de contrôle de position à double circuit avec couplage d'amortissement en vitesse. Une vue modèle de cette structure est représentée sur la figure 9.
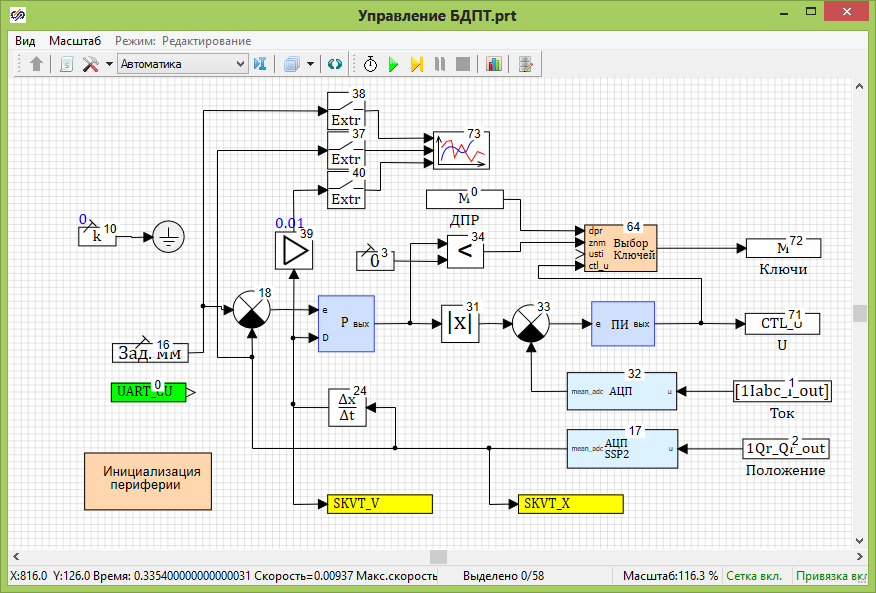
Figure 9. Schéma de conception du programme de commande d'entraînement.
Avec la poursuite de l'utilisation de la génération de code, il n'est plus nécessaire de coder manuellement les algorithmes du système de contrôle - un projet terminé dans l'environnement de développement de Keil uVision est créé automatiquement. Après avoir assemblé l'image binaire du programme, elle peut être traduite dans notre processeur (1986BE1T).
Notez que les blocs de modèle «Key Choice», «Peripheral Initialization», «ADC», «SSP2 ADC» en mode simulation implémentent les modèles mathématiques correspondants, et lors de la génération du code, ils sont remplacés par des bibliothèques pour travailler avec les périphériques du processeur utilisé.
Après avoir choisi la structure du système de contrôle et ses paramètres, nous avons dû:
- effectuer la génération automatique de code du programme
- écrire le programme reçu sur le contrôleur
- capturer d'excellents résultats
Sur la figure 10, vous pouvez comparer le fonctionnement du modèle et le véritable entraînement. Comme référence de position, une sinusoïde avec une fréquence de 3 Hz et une amplitude de 3 mm a été utilisée.
Pour obtenir des données du contrôleur, une partie spéciale a été fournie dans son programme qui a fourni la lecture des signaux internes via une interface série. L'utilisateur, pendant que le lecteur fonctionne, voit les résultats du micrologiciel dans la fenêtre SimInTech.

Figure 10. Comparaison du modèle et du lecteur réel.
Eh bien, même la couleur est la même ici ....
Vive, camarades !!! C'est arrivé !!!
Toute personne intéressée par le sujet de la propulsion électrique recommande de télécharger le livre gratuit
Kalachev Yu.N. Modeling in the electric drive.