Messages dans la série:
8. Nous contrôlons à partir du téléphone-ROS Control, GPS-node7. Localisation du robot: gmapping, AMCL, points de référence sur le plan de la salle6. Odométrie avec encodeurs de roue, plan de salle, lidar5. Nous travaillons en rviz et gazebo: xacro, nouveaux capteurs.4. Créez une simulation de robot à l'aide des éditeurs rviz et gazebo.3. Accélérez, changez la caméra, corrigez la démarche2. Logiciel1. FerEn commençant à étudier ROS (Robotic operation system), vous êtes d'abord étonné de voir comment «tout est compliqué», à partir de la quantité d'informations sur les sujets, les nœuds, les actions, votre tête tourne. Et, le premier désir est de revenir à gérer le robot aux bons vieux scripts. Mais non. Chaque homme adulte devrait collecter quelque chose de moins pour un homme qui conduirait, clignerait des yeux, grincerait. ROS a été choisi comme plate-forme, car il s'agit toujours de la prochaine étape dans le développement de robots dans le monde de l'arduino sans âme. Il est proposé d'assembler le "chariot" ROS, qui sera non seulement bon marché, mais aussi fonctionnel: il pourra suivre la ligne au sol avec votre chat, votre corps :) Les premières étapes seront:
Quelques paroles de plus
La deuxième chose qui frappe lors de l'étude des ROS est le coût des plateformes sur le marché. Un ensemble de burger de tortue (
comme l'un des plus abordables ) - 549 $ (34 500 p.). Tout le reste est encore plus cher. Ici, on peut affirmer que la part du lion du prix est le lidar, un appareil pour déterminer la position du robot dans l'espace. Ce qui en soi se situe sous 15k p. Cependant, tous les autres composants ne sont pas non plus bon marché.
Calculons combien nous coûtera notre "panier":
Total: 8000 p.
Le prix est également élevé, mais d'un ordre de grandeur moins cher que le turtlebot. Si vous le souhaitez, les voitures peuvent être imprimées sur une imprimante 3D ou prendre un morceau de contreplaqué. Il ne reste alors plus qu'à prendre des moteurs à courant continu. La batterie pour la framboise peut également être remplacée par un analogique moins cher, l'essentiel est qu'elle donne 5V 3A.
Nous collectonsLe projet était basé sur un projet déjà existant -
www.rosbots.com/build_it , mais avec des modifications importantes. De plus, le projet de base, à en juger par les informations du site, a été abandonné, vous devez donc tout penser à vous.
Le début de l'assemblage et du montage des moteurs est similaire aux instructions ci-dessus:
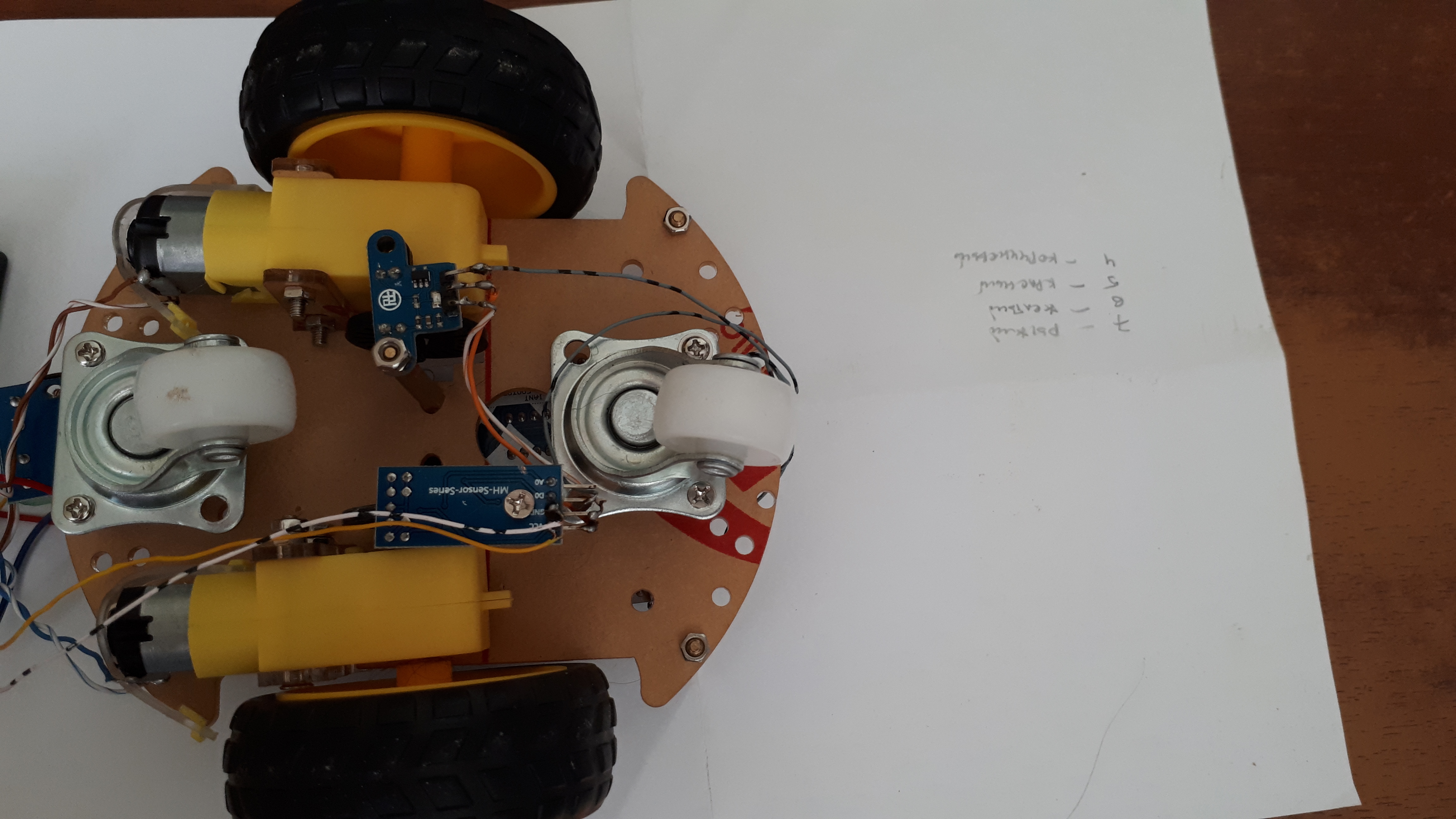
Ici, vous devez faire attention aux encodeurs, qui sont montés de telle sorte qu'ils "recouvrent" les disques avec des fentes, habillés de moteurs:
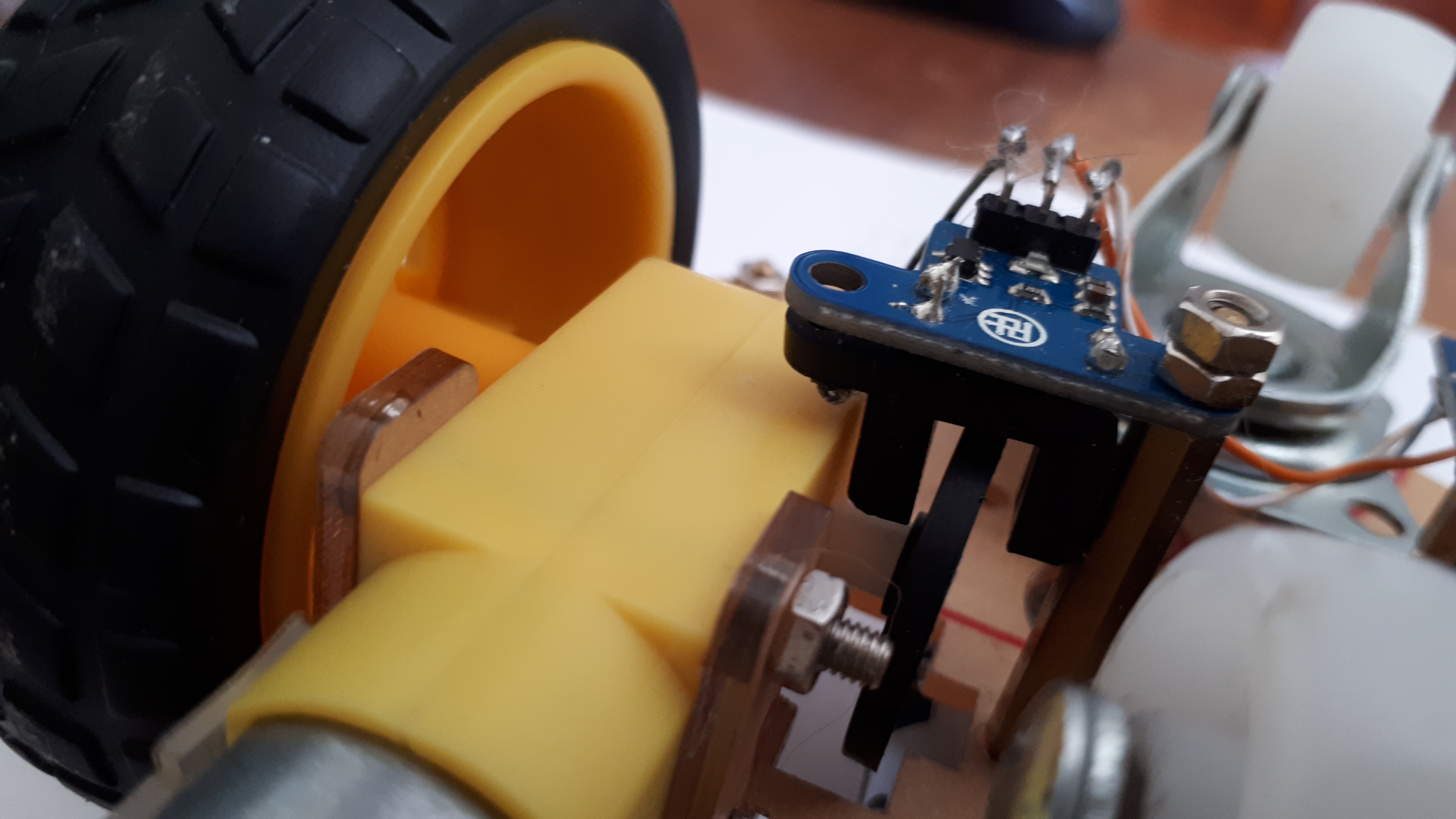
* En général, les encodeurs ne sont pas très utiles et vous ne pouvez pas les monter. Les encodeurs optiques vous permettent de déterminer la distance parcourue, mais malheureusement, ils ne vous permettent pas de déterminer la direction du mouvement.
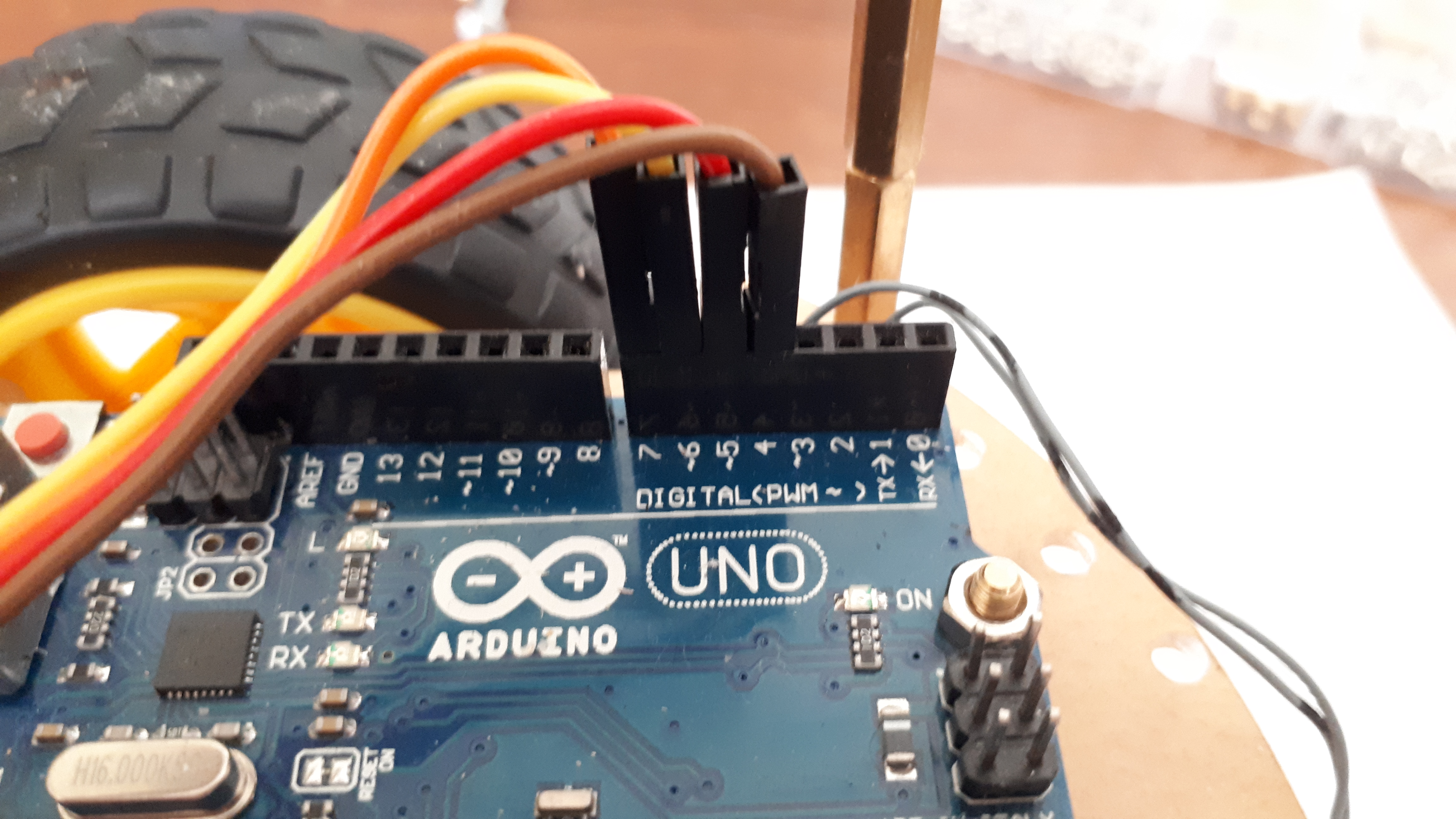
Après avoir installé les moteurs et les encodeurs (en option), nous connectons les fils à l'uno arduino, le pilote du moteur, le compartiment à piles de 2 batteries 18650. Le schéma de connexion est similaire à celui affiché sur le site Web du projet de base à une exception près:

5 V pour les encodeurs peuvent être pris avec Arduino (VCC du capteur de vitesse droit et capteur de vitesse gauche à 5 V Arduino).
Nous réparons l'arduino et le pilote du moteur, puissance pour le conducteur:

Nouilles plus près:
Conducteur de moteur. Les bornes vertes contiennent des paires de fils des moteurs:

L'Arduino ne sera pas alimenté par des piles, il sera ensuite connecté via USB à la framboise.
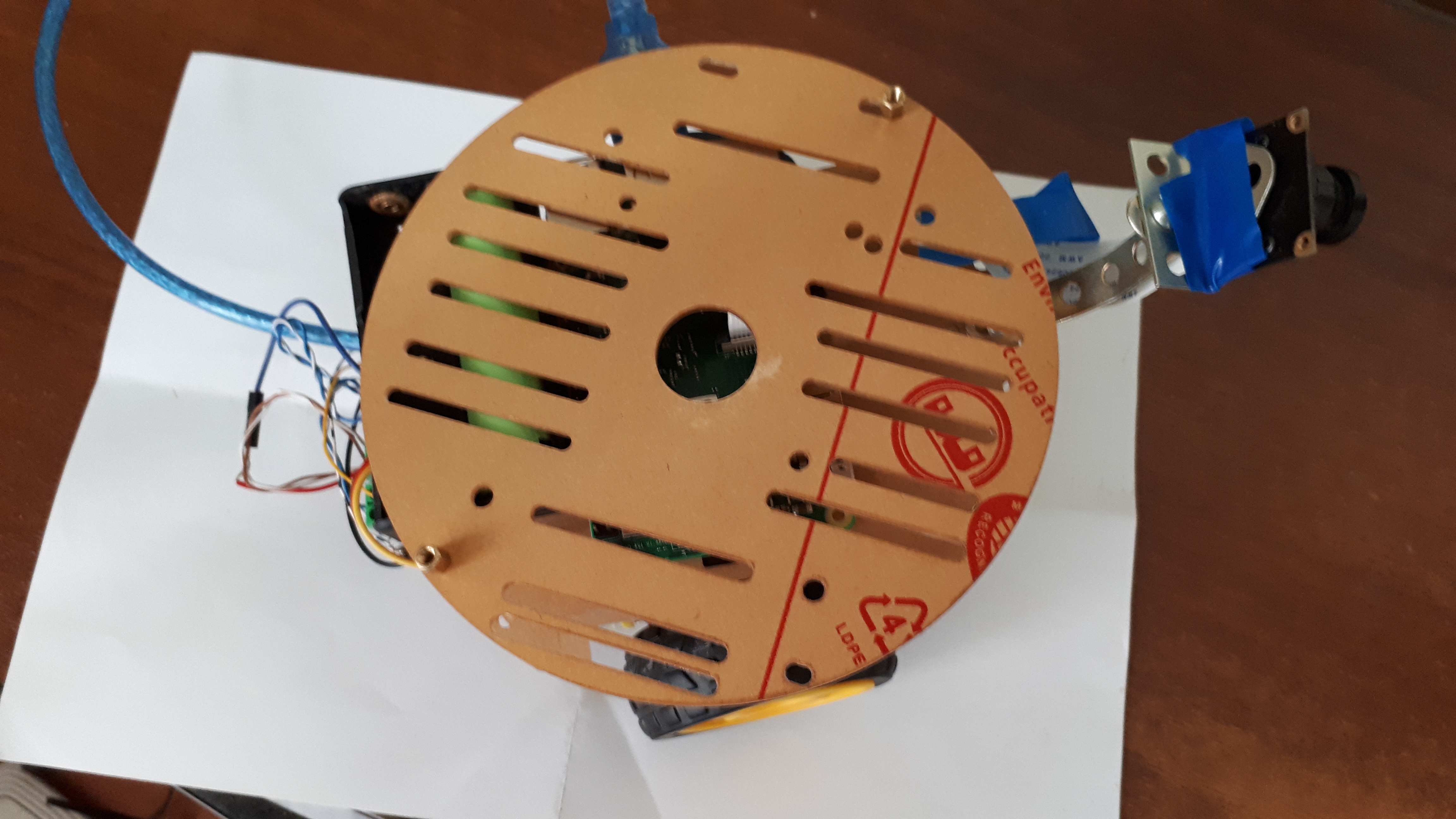
Nous mettons la deuxième couche de la machine
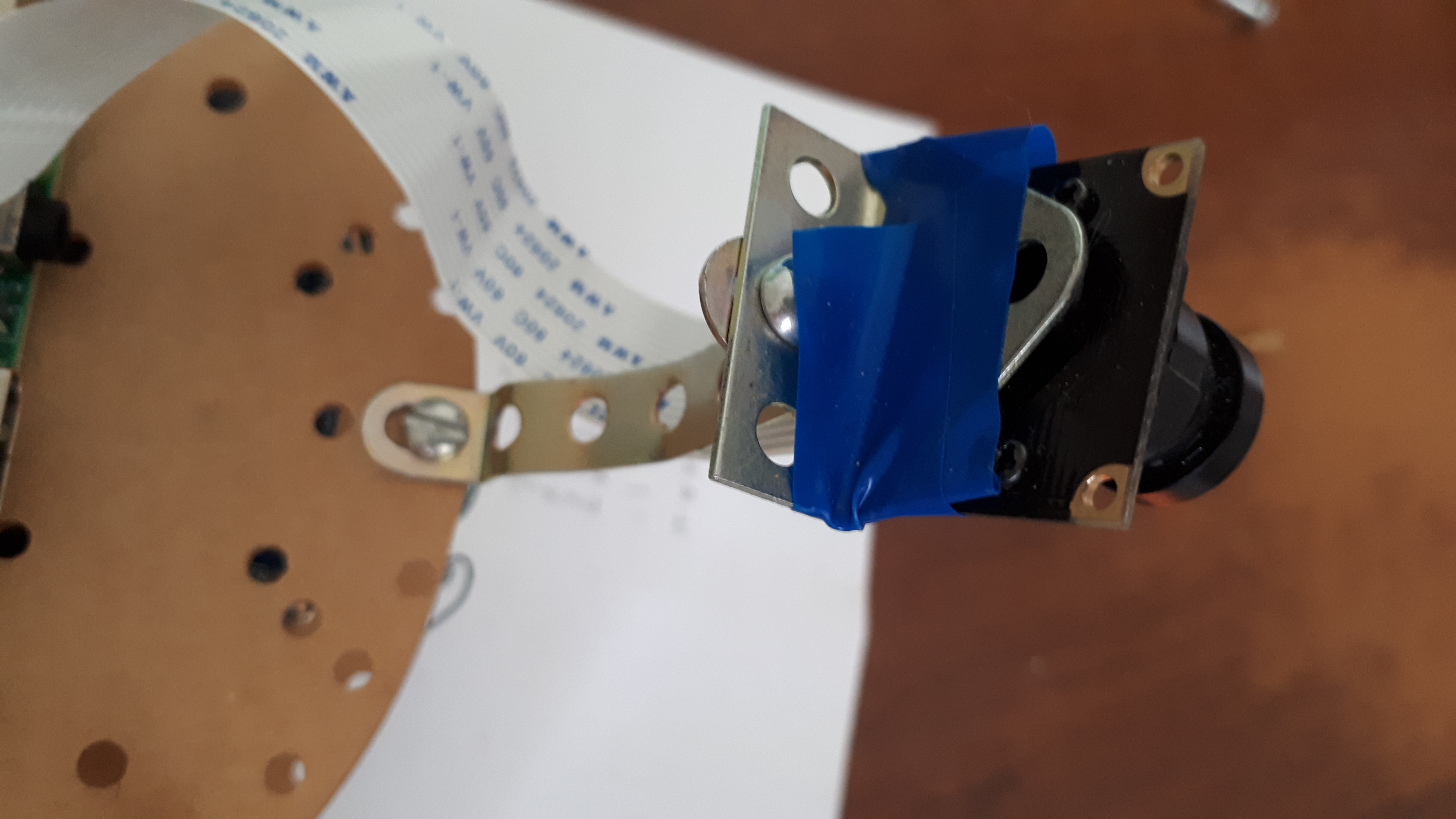
Ici se trouvera le compartiment à piles, framboise pi, l'appareil photo sur les détails du concepteur soviétique:
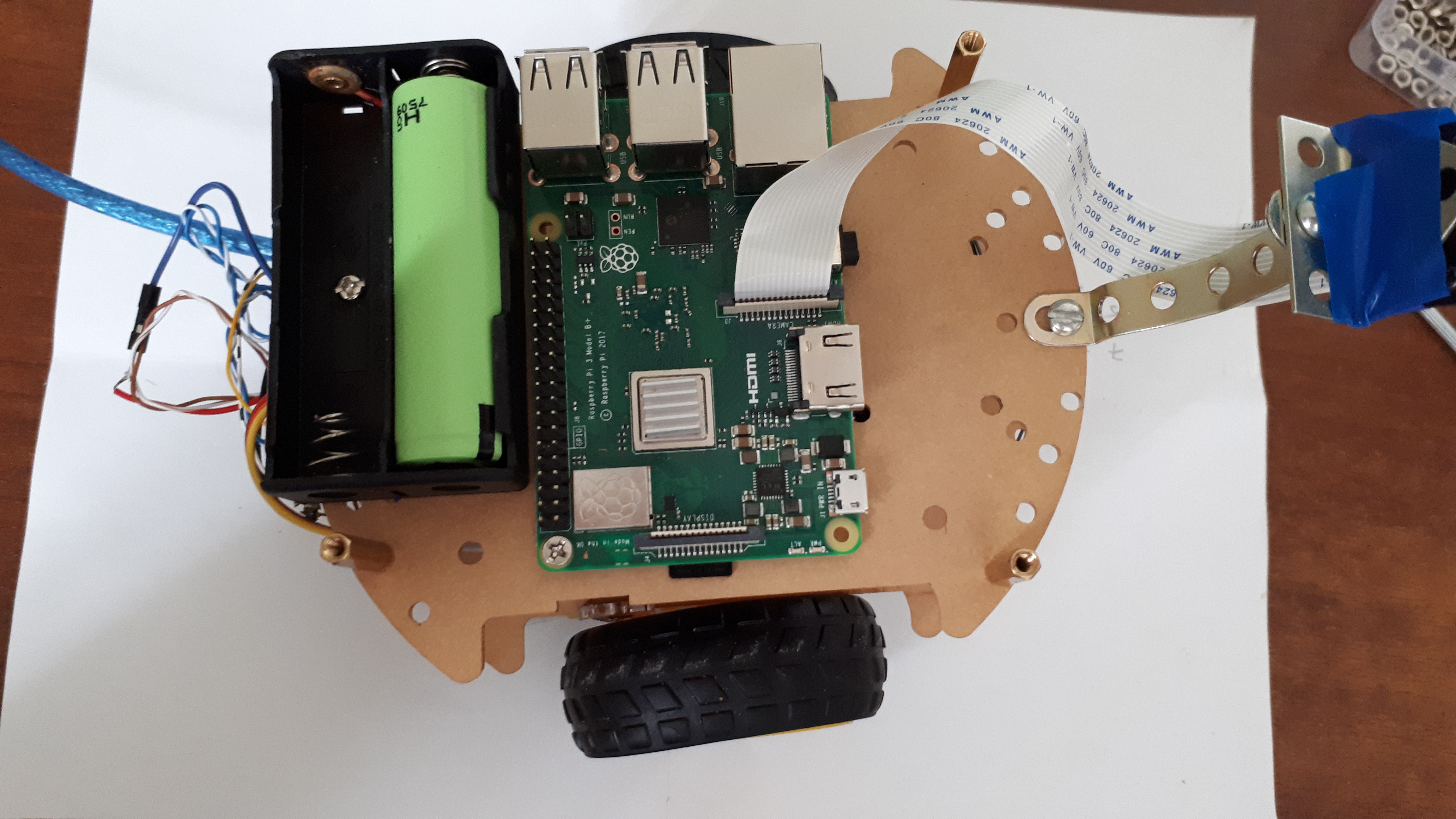
N'oubliez pas de brancher correctement le câble de la caméra sur la framboise:

Designer soviétique en:
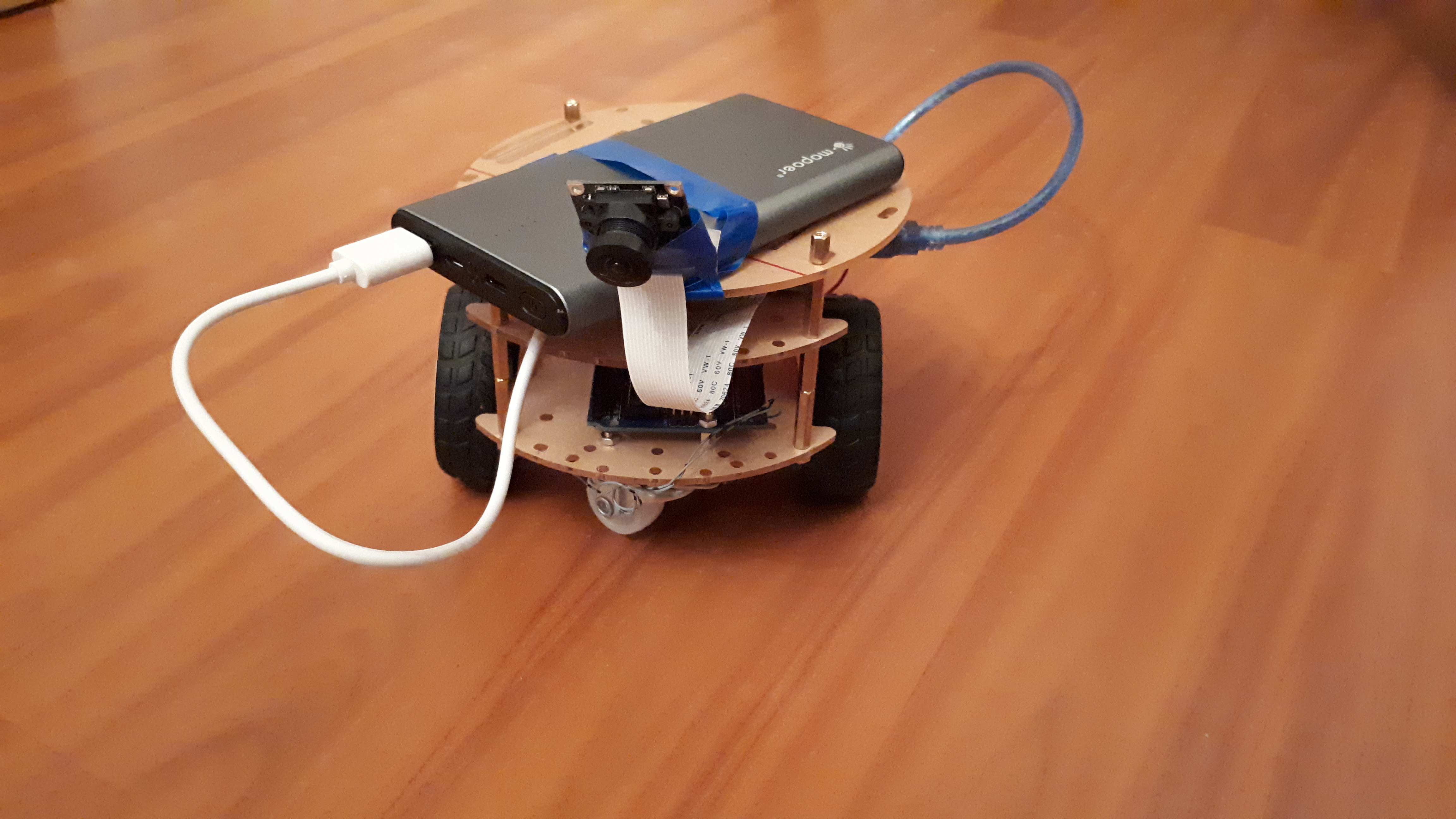
 Fermez le burger, la troisième couche du "chariot"
Fermez le burger, la troisième couche du "chariot" .
Ici va conduire un powerbank pour la framboise:

* Un peu de powerbank pour alimenter la framboise pi:
:
Tout, la voiture est prête!
Dans les articles suivants, nous parlerons directement des ROS, des lignes, du corps, des chats et des sourires.
Les conseils et les critiques impitoyables sont les bienvenus!
* Le schéma de câblage est mis à jour.