 Remarque 16 juillet 2019 Elon Musk a présenté la technologie, qui a été l'une des premières tentatives sérieuses d'introduction d'interfaces neurologiques dans la pratique clinique et ayant de véritables objectifs transhumains à long terme. Cet article est une traduction, avec quelques notes, de l' article original décrivant la technologie de l'interface du neuro-ordinateur, un lien vers lequel est également publié sur le site Web de la société de développement Neuralink . L'article décrit les caractéristiques et les caractéristiques des principaux modules sous-jacents à cette technologie, notamment: des microélectrodes biocompatibles flexibles, un manipulateur neurochirurgical robotisé pour introduire des électrodes dans le cerveau, ainsi que la microélectronique spécialisée assurant la réception, l'amplification et la numérisation d'un signal provenant de l'activité neuronale.
Remarque 16 juillet 2019 Elon Musk a présenté la technologie, qui a été l'une des premières tentatives sérieuses d'introduction d'interfaces neurologiques dans la pratique clinique et ayant de véritables objectifs transhumains à long terme. Cet article est une traduction, avec quelques notes, de l' article original décrivant la technologie de l'interface du neuro-ordinateur, un lien vers lequel est également publié sur le site Web de la société de développement Neuralink . L'article décrit les caractéristiques et les caractéristiques des principaux modules sous-jacents à cette technologie, notamment: des microélectrodes biocompatibles flexibles, un manipulateur neurochirurgical robotisé pour introduire des électrodes dans le cerveau, ainsi que la microélectronique spécialisée assurant la réception, l'amplification et la numérisation d'un signal provenant de l'activité neuronale.Annotation
Les interfaces neuro-informatiques (IMC - interface cerveau-machine) offrent la possibilité de restaurer la fonction sensorielle et motrice, ainsi que le traitement des troubles neurologiques, mais jusqu'à présent l'IMC n'a pas encore reçu une large distribution clinique, en partie en raison du nombre insuffisant de canaux qui limitent leur potentiel. Dans ce livre blanc, nous décrivons les premières étapes de Neuralink vers un système à large bande BMI évolutif. Nous avons créé des réseaux d'électrodes «filetées» petites et flexibles, dans lesquelles jusqu'à 3072 électrodes sont réparties sur 96 fils. Nous avons également créé un robot neurochirurgical capable d'implanter six brins (192 électrodes) par minute. Chaque fil peut être inséré individuellement dans le cerveau avec une précision de microns pour éviter d'endommager le réseau vasculaire superficiel et atteindre un objectif dans une zone précisément définie du cerveau. Le réseau d'électrodes est emballé dans un petit appareil implantable qui contient des microcircuits spéciaux pour une amplification intégrée de faible puissance et la numérisation du signal: le paquet pour 3072 canaux a des dimensions de 23 × 18,5 × 2 mm et un volume de 0,851 cm3. Un câble USB-C permet de diffuser des données à partir d'un appareil avec une bande passante complète et un enregistrement simultané de tous les canaux. Jusqu'à 85,5% des électrodes implantées ont enregistré directement des pics d'activité neuronale. L'approche de Neuralink à l'IMC a une densité d'électrodes et une évolutivité sans précédent, permettant une utilisation clinique dans l'assemblage.
1. Introduction
L'interface cerveau-machine (IMC) peut aider les personnes atteintes d'un large éventail de troubles cliniques. Par exemple, les chercheurs ont démontré leur capacité à contrôler à l'aide de curseurs informatiques de neuro-prothèses [1, 2, 3], de membres robotiques [4, 5] et de synthétiseurs vocaux [6] en utilisant, dans tous ces exemples, pas plus de 256 électrodes. Bien que ces avancées suggèrent que le transfert d'informations de haute précision entre le cerveau et les machines est possible, le développement de l'IMC a été considérablement limité par l'incapacité d'enregistrer les signaux d'un grand nombre de neurones. Les approches non invasives peuvent enregistrer une moyenne de millions de neurones à travers le crâne, mais ce signal est déformé et non spécifique [7, 8]. Les électrodes invasives situées à la surface du cortex peuvent enregistrer des signaux utiles, mais elles sont limitées en ce sens qu'elles font la moyenne de l'activité de milliers de neurones et ne peuvent pas enregistrer de signaux au plus profond du cerveau [9]. La plupart des IMC utilisent des méthodes invasives car la lecture la plus précise des représentations neuronales nécessite l'enregistrement de potentiels d'action neuronaux uniques dans des ensembles distribués et fonctionnellement liés [10].
Les microélectrodes sont l'étalon-or de la technologie pour l'enregistrement des potentiels d'action, mais jusqu'à présent, il n'y a pas eu de technologie de microélectrodes développée cliniquement qui pourrait être mise à l'échelle pour enregistrer l'activité d'un grand nombre de neurones [11]. Cela nécessitera un système créé à partir de matériaux aux propriétés spéciales qui offrent une biocompatibilité, une sécurité et une durabilité élevées. De plus, ce dispositif nécessitera également une approche chirurgicale pratique et un équipement électronique de faible puissance et haute densité pour, au final, fournir des performances d'implant entièrement sans fil.
La plupart des dispositifs d'enregistrement neuronal à long terme sont des réseaux d'électrodes en métaux durs ou semi-conducteurs [12, 13, 14, 15, 16, 17, 18]. Alors que les grilles métalliques rigides facilitent la pénétration dans le cerveau, la taille, le module de Young, l'inadéquation de la rigidité en flexion entre les sondes rigides et le tissu cérébral peuvent stimuler les réponses immunitaires qui limitent la fonction et la durabilité de ces dispositifs [19, 11]. De plus, la géométrie fixe de ces réseaux limite les populations de neurones accessibles, notamment en raison de la présence du système vasculaire.
Une autre approche consiste à utiliser de minces sondes polymères multi-électrodes flexibles [20, 21]. La taille plus petite et la flexibilité accrue de ces sondes devraient fournir une plus grande biocompatibilité. Cependant, l'inconvénient de cette approche est que les sondes en polymère minces ne sont pas suffisamment rigides pour être directement insérées dans le cerveau; leur introduction doit être pourvue de raidisseurs [22, 21], d'injection [23, 24] ou d'autres approches [25], et tous sont assez lents [26, 27]. Afin de répondre aux exigences fonctionnelles des INQ à haut débit, en tirant parti des dispositifs à couches minces, nous avons développé une approche robotique dans laquelle un grand nombre de sondes polymères minces et flexibles sont insérées de manière efficace et indépendante dans diverses régions du cerveau [28].
Ici, nous rendons compte des progrès de Neuralink dans la création d'un IMC flexible et évolutif, qui augmente le nombre de canaux d'un ordre de grandeur par rapport aux travaux précédents. Notre système comprend trois composants principaux: des sondes en polymère ultrafin (section 2 de ce rapport), un robot neurochirurgical (section 3) et une électronique spécialisée à haute densité (section 4). Nous démontrons une technologie qui permet l'implantation rapide de 96 filaments de polymère, chacun contenant 32 électrodes, pour un total de 3072 électrodes.
Nous avons développé une électronique spécialisée miniature, qui nous permet de transmettre simultanément toutes les données d'électrophysiologie large bande à partir de toutes ces électrodes (section 5). Nous avons conditionné ce système de manière à permettre son implantation à long terme et développé un logiciel spécial pour la détection en ligne des pics d'activité des neurones, qui peut détecter des potentiels d'action à faible latence. Ensemble, ce système sert de plate-forme de recherche moderne et de premier prototype d'interface de micro-ordinateur humain entièrement implantable.
2. Fils
 Figure 1
Figure 1 : Nos nouvelles sondes polymères (filetages). A. Sonde à bord linéaire, avec 32 contacts d'électrode espacés de 50 microns. B. Une sonde "arborescente" avec 32 contacts d'électrodes espacés de 75 microns. C. Image plus grande des électrodes individuelles pour la structure A, en soulignant leur petite surface géométrique. D. Distribution d'impédance d'électrode (mesurée à 1 kHz) pour deux traitements de surface: PEDOT (n = 257) et IrOx (n = 588).
Nous avons développé un procédé individuel pour la fabrication de sondes neuronales avec une distance minimale entre les électrodes, qui utilisent une variété de matériaux biocompatibles en couches minces. Le principal substrat et diélectrique utilisé dans ces sondes est le polyimide, qui recouvre un mince film d'or. Chaque matrice à couches minces se compose d'une région «filament», qui a des contacts, des pistes d'électrodes et une région «capteur», où une couche mince est connectée à des microcircuits non standard qui fournissent l'amplification et la réception du signal. Le processus de microproduction au niveau des plaquettes garantit leur productivité élevée. Chaque plaque est recouverte de dix dispositifs à couches minces qui reçoivent un signal provenant d'un total de 3072 contacts d'électrode.
48 ou 96 threads sont connectés à chaque réseau, chacun contenant à son tour 32 électrodes indépendantes. Les circuits intégrés sont connectés aux contacts dans la zone du capteur à couche mince en utilisant le processus de liaison à puce inversée (note: https: //en.wikipedia.org/wiki/Flip_chip).
L'un des objectifs de cette approche est de réaliser la plus petite section possible du fil pour minimiser le déplacement des tissus dans le cerveau. Pour y parvenir, tout en conservant un nombre élevé de canaux, la lithographie par projection étape par étape et d'autres méthodes de microtraitement sont utilisées pour obtenir un film métallique avec une résolution submicronique.
Nous avons conçu et fabriqué plus de 20 types différents de filaments et d'électrodes pour nos réseaux; deux exemples de construction sont présentés dans les panneaux A et B de la fig. 1. Nous avons fabriqué des filaments d'une largeur de 5 à 50 microns, qui incluent les emplacements d'enregistrement de plusieurs géométries (Fig. 1). L'épaisseur du fil est de 4 à 6 microns, ce qui comprend jusqu'à trois couches d'isolant et deux couches de conducteur. La longueur de fil typique est d'environ 20 mm. Avant l'insertion, du parylène-C est appliqué sur les fils pour former un film sur lequel les fils restent attachés jusqu'à ce que le robot chirurgical les retire. Chaque fil se termine par une boucle (16 × 50) μm2 pour permettre l'enfilage de l'aiguille.
Étant donné que les sections individuelles de l'électrode en or ont de petites surfaces géométriques (figure 1C), nous utilisons des modifications de surface pour réduire l'impédance pour l'électrophysiologie et augmenter la capacité portante effective de la surface (figure 1D). Deux de ces traitements que nous avons utilisés sont des polymères électriquement conducteurs polyéthylènedioxythiophène dopés au polystyrène sulfonate (PEDOT: PSS) [29, 30] et à l'oxyde d'iridium (IrOx) [31, 32]. Lors d'essais sur banc, nous avons atteint des impédances de 36,97 ± 4,68 kOhm (n = 257 électrodes) et 56,46 ± 7,10 kOhm (n = 588) pour PEDOT: PSS et IrOx, respectivement. La faible impédance de PEDOT: PSS est prometteuse, mais la stabilité et la biocompatibilité à long terme de PEDOT: PSS sont moins fiables que pour IrOx. Ces procédés et procédés peuvent être améliorés et étendus à d'autres types de matériaux et revêtements d'électrodes conductrices.
3. Robot neurochirurgical
 Figure 2 : taille de la cartouche de la cartouche d'aiguille (NPC) par rapport à une pièce d'un cent.
Figure 2 : taille de la cartouche de la cartouche d'aiguille (NPC) par rapport à une pièce d'un cent.Les polymères à couches minces étaient auparavant utilisés pour les sondes à électrodes [21], mais leur faible rigidité en flexion compliquait le processus d'insertion. Neuralink a développé une approche avec l'insertion robotisée de sondes flexibles [28], qui permet l'insertion rapide et fiable d'un grand nombre de sondes en polymère visant à prévenir les dommages au système vasculaire et les enregistrements de petites zones du cerveau. La tête d'injection du robot est positionnée avec une précision de 10 microns sur une plate-forme à trois axes mesurant 400 mm × 400 mm × 150 mm et contient un petit ensemble «porte-aiguille» rapidement remplaçable (Fig. 2, Fig. 3A).
L'aiguille est fraisée à partir d'un fil de tungstène-rhénium d'un diamètre de 40 μm, et au moyen d'une gravure électrochimique, son diamètre est réduit à 24 μm sur la longueur entrée (figure 2A). La pointe de l'aiguille est conçue pour engager des boucles pour l'insertion - pour transporter et insérer des fils individuels - et pour pénétrer dans les méninges et le tissu cérébral. L'aiguille est entraînée par un moteur linéaire, fournissant une vitesse d'entrée variable et une accélération rapide de la rétraction (jusqu'à 30 000 mm s -2) pour faciliter la séparation de la sonde et de l'aiguille. Le pinceur est un fil de tungstène d'un diamètre de 50 μm, plié à la pointe et avec un entraînement dans les directions axiale et rotationnelle (figure 2B). Il sert de support aux sondes pendant le transport et de guide pour s'assurer que les fils sont insérés le long du trajet de l'aiguille. La figure 4 montre une séquence de photographies du processus d'insertion de brins dans une simulation agarous de tissu cérébral.
 Figure 3
Figure 3 : dispositif robotique pour l'introduction d'électrodes; une vue agrandie de la tête d'entrée est montrée dans l'encart. A. Porte-aiguille chargé. B. Capteur de contact de la position du cerveau à faible impact. C. Modules lumineux avec plusieurs longueurs d'onde indépendantes. D. Moteur d'aiguille. E. L'une des quatre caméras qui se concentre sur l'aiguille lors de l'insertion. F. Caméra avec un large angle de vision du champ chirurgical. G. Caméras stéréoscopiques.
La tête du dispositif robotique d'introduction de fils possède également une pile de caméras pour l'acquisition d'images (Fig.3E-G), qui sont utilisées pour guider l'aiguille dans la boucle du fil, viser avant d'entrer, visualiser l'entrée en temps réel et vérifier. De plus, la tête de l'appareil contient six modules d'éclairage indépendants, dont chacun est capable d'éclairer indépendamment avec une longueur d'onde de 405 nm, 525 nm et 650 nm ou de la lumière blanche (figure 3C). L'éclairage à 405 nm excite la fluorescence du polyimide et permet à la pile optique et à la vision par ordinateur de localiser de manière fiable la boucle de filament (16 × 50) μm2 et d'effectuer un asservissement visuel submicronique pour diriger l'aiguille illuminée à 650 nm à travers la boucle. Des caméras stéréoscopiques, des calculs monoculaires logiciels avec une profondeur de champ étendue et un éclairage à 525 nm permettent d'évaluer avec précision la localisation de la surface du cortex cérébral.
Le robot enregistre les emplacements dans une grille de coordonnées commune sur le crâne, qui, combinée à un suivi en profondeur, cible avec précision les structures cérébrales définies anatomiquement. Un progiciel personnalisé intégré vous permet de présélectionner tous les points d'insertion, ce qui vous permet de planifier le chemin d'insertion, de minimiser la confusion et la charge sur chaque fil. L'une des principales fonctions de planification est la possibilité d'éviter d'endommager le réseau vasculaire lors de l'insertion, ce qui est l'un des principaux avantages de l'introduction séparée des électrodes. Ceci est particulièrement important car on pense que les dommages à la barrière hémato-encéphalique jouent un rôle clé dans la réponse inflammatoire du cerveau aux objets étrangers [33].
Le robot dispose d'un mode d'insertion automatique, qui vous permet d'insérer jusqu'à 6 fils (192 électrodes) par minute. Malgré le fait que toute la procédure d'injection peut être automatisée, le chirurgien conserve un contrôle total et, si désiré, peut effectuer un micro-ajustement manuel de la position du fil avant chaque introduction dans le cortex. Le robot neurochirurgical est compatible avec un boîtier stérile et présente des caractéristiques qui facilitent les injections réussies et rapides, telles que la stérilisation automatique à l'aiguille à ultrasons. La cartouche porte-aiguille (NPC; figure 2C) est la partie de la tête d'insertion qui est en contact direct avec le tissu cérébral et est un article consommable qui peut être remplacé pendant la chirurgie en moins d'une minute.
 Figure 4
Figure 4 : 1. Un dispositif d'entrée avec un fil approchant la simulation du tissu cérébral. i. aiguille et canule (note: aiguille creuse). ii. fil précédemment inséré. 2. L'insert touche la surface simulant le tissu cérébral. 3. L'aiguille pénètre dans le tissu d'imitation, délivrant le fil à une profondeur prédéterminée. iii. insertion de fil. 4. Le dispositif d'entrée de fil part, laissant le fil dans le tissu. iv. filetage implanté.
En utilisant ce système, nous avons démontré le succès de l'administration dans 87,1 ± 12,6% des cas (moyenne ± écart-type), après 19 opérations. Au cours de l'étude, des ajustements manuels précis ont été effectués pour éviter d'endommager la microvascularisation des canaux à la surface du cortex, ce qui a augmenté le temps d'administration total du plus rapide. Même en tenant compte de ces corrections, le temps d'administration total de cette étude était en moyenne de ~ 45 minutes, avec un taux d'introduction approximatif de 29,6 électrodes par minute (Fig. 6). L'introduction a été réalisée avec une craniotomie bilatérale de sites d'une superficie de (4 × 7) mm2 avec un intervalle> 300 μm entre les filaments afin de maximiser la couverture corticale. Cela démontre que l'insertion robotisée d'électrodes de polymère minces est une approche efficace et évolutive pour enregistrer l'activité d'un grand nombre de neurones dans des zones anatomiquement définies du cerveau.
4. Électronique
L'enregistrement continu de signaux provenant de milliers d'électrodes présente des problèmes importants avec l'électronique et l'emballage. La densité des canaux d'enregistrement nécessite le placement du module d'amplification et la numérisation du signal dans l'assemblage de l'appareil lui-même, sinon les exigences pour le câble et le connecteur seront excessivement élevées.
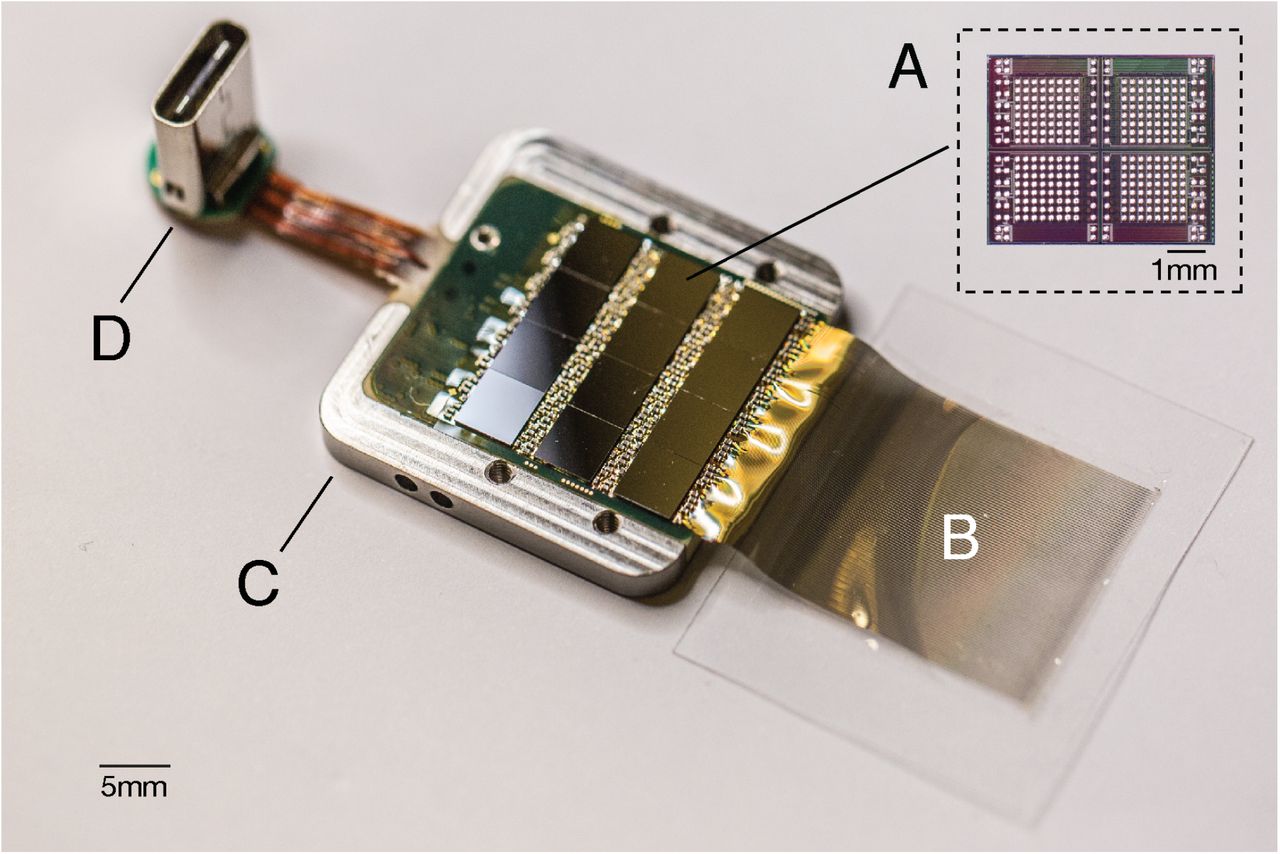
Ce module d'enregistrement devrait amplifier les signaux neuronaux faibles (<10 μVRMS), en même temps supprimer le bruit hors bande, échantillonner et numériser les signaux amplifiés et produire les résultats pour un traitement en temps réel - le tout en utilisant la plus petite puissance et taille possible.L'électronique est basée sur notre circuit intégré spécialisé (ASIC) pour les applications Neuralink, qui se compose de 256 amplificateurs programmables individuellement («pixels analogiques»), de convertisseurs analogiques-numériques (ADC) intégrés et d'un circuit de commande périphérique pour sérialiser les signaux de sortie numérisés.Le pixel analogique est facilement configurable: les propriétés de gain et de filtre peuvent être calibrées pour tenir compte des changements de qualité du signal dus à la variabilité du processus et à l'environnement électrophysiologique. L'ADC intégré effectue un échantillonnage à une fréquence de 19,3 kHz avec une résolution de 10 bits. Chaque pixel analogique consomme 5,2 μW et l'ASIC entier consomme environ 6 mW, y compris les pilotes d'horloge. Les caractéristiques de l'ASIC Neuralink sont présentées dans le tableau 1, et une photographie du dispositif fabriqué est montrée sur la Fig. 5A. Figure 5: Touchez l'appareil dans l'emballage. A. Chaque puce individuelle dans un ASIC est capable de traiter 256 canaux de données. L'ensemble de l'appareil contient 12 de ces puces, ce qui représente au total 3072 canaux. B. Fils polymères à base de parylène. C. Boîtier en titane (couvercle retiré). D. Connecteur USB-C numérique pour l'alimentation et le transfert de données.Neuralink ASIC est au cœur d'une plate-forme d'enregistrement modulaire qui facilite le remplacement de composants pour la recherche et le développement (Fig. 5). Dans les systèmes discutés ici, plusieurs ASIC sont intégrés dans une carte de circuit imprimé standard (PCB) en utilisant la méthode de connexion à puce. Chaque système se compose d'un réseau de portes programmables par l'utilisateur (environ FPGA); capteurs de température, accéléromètre, magnétomètre en temps réel et un connecteur USB-C pour la transmission de données avec une bande passante complète. Les systèmes sont emballés dans des boîtiers en titane recouverts de C-Parylene, qui sert de barrière à l'humidité pour empêcher la pénétration de liquide et prolonger la durée de vie.Nous avons décrit les configurations créées: le système d'enregistrement sur 1536 canaux («Système A») et le système d'enregistrement sur 3072 canaux («Système B»), dans le tableau 2. Alors que le système A utilise la génération actuelle ASIC Neuralink, le système B utilise la précédente version avec des fonctionnalités comparables, mais avec des performances inférieures. Le système B a été conçu pour maximiser la densité des canaux et est utilisé pour les applications qui nécessitent un très grand nombre de canaux. Le système A, en revanche, a été conçu pour fournir une installation plus rapide et plus fiable; il peut être installé cinq fois plus rapidement que le système B, qui est plus efficace.
Figure 5: Touchez l'appareil dans l'emballage. A. Chaque puce individuelle dans un ASIC est capable de traiter 256 canaux de données. L'ensemble de l'appareil contient 12 de ces puces, ce qui représente au total 3072 canaux. B. Fils polymères à base de parylène. C. Boîtier en titane (couvercle retiré). D. Connecteur USB-C numérique pour l'alimentation et le transfert de données.Neuralink ASIC est au cœur d'une plate-forme d'enregistrement modulaire qui facilite le remplacement de composants pour la recherche et le développement (Fig. 5). Dans les systèmes discutés ici, plusieurs ASIC sont intégrés dans une carte de circuit imprimé standard (PCB) en utilisant la méthode de connexion à puce. Chaque système se compose d'un réseau de portes programmables par l'utilisateur (environ FPGA); capteurs de température, accéléromètre, magnétomètre en temps réel et un connecteur USB-C pour la transmission de données avec une bande passante complète. Les systèmes sont emballés dans des boîtiers en titane recouverts de C-Parylene, qui sert de barrière à l'humidité pour empêcher la pénétration de liquide et prolonger la durée de vie.Nous avons décrit les configurations créées: le système d'enregistrement sur 1536 canaux («Système A») et le système d'enregistrement sur 3072 canaux («Système B»), dans le tableau 2. Alors que le système A utilise la génération actuelle ASIC Neuralink, le système B utilise la précédente version avec des fonctionnalités comparables, mais avec des performances inférieures. Le système B a été conçu pour maximiser la densité des canaux et est utilisé pour les applications qui nécessitent un très grand nombre de canaux. Le système A, en revanche, a été conçu pour fournir une installation plus rapide et plus fiable; il peut être installé cinq fois plus rapidement que le système B, qui est plus efficace.
 Une station de base connectée à un réseau local Ethernet convertit les flux de données de ces systèmes en paquets de multidiffusion Ethernet 10G qui permettent aux utilisateurs ultérieurs de traiter les données de diverses manières, par exemple, la visualisation de données en temps réel [34] ou l'enregistrement sur disque. Chaque station de base peut connecter jusqu'à trois implants simultanément. Les appareils sont en outre pris en charge par un écosystème logiciel qui offre une facilité d'utilisation sur le principe du «plug and play» avec une configuration zéro: le flux de données est activé automatiquement lorsque le câble est connecté.
Une station de base connectée à un réseau local Ethernet convertit les flux de données de ces systèmes en paquets de multidiffusion Ethernet 10G qui permettent aux utilisateurs ultérieurs de traiter les données de diverses manières, par exemple, la visualisation de données en temps réel [34] ou l'enregistrement sur disque. Chaque station de base peut connecter jusqu'à trois implants simultanément. Les appareils sont en outre pris en charge par un écosystème logiciel qui offre une facilité d'utilisation sur le principe du «plug and play» avec une configuration zéro: le flux de données est activé automatiquement lorsque le câble est connecté.5. Électrophysiologie
Nous avons implanté les deux systèmes A et B sur des rats mâles Long-Evans comme décrit dans la section 3. Toutes les procédures animales ont été effectuées conformément aux directives du Conseil national de recherches pour le soin et l'utilisation des animaux de laboratoire et ont été approuvées par le comité Neuralink Animal Care and Use. Des enregistrements électrophysiologiques ont été effectués lorsque les animaux ont exploré librement une arène équipée d'un câble permettant un mouvement illimité. Le système A peut enregistrer 1344 des 1536 canaux simultanément, la configuration exacte du canal peut être spécifiée arbitrairement pendant l'enregistrement; Le système B peut enregistrer à partir de tous les 3072 canaux simultanément. Les signaux à large bande numérisés ont été traités en temps réel pour déterminer les potentiels d'action des neurones (pics) à l'aide de l'algorithme de détection en ligne. Figure 6 : Implantation et assemblage du fil. A. Un exemple d'image en direct montrant la surface du cortex avec des fils implantés et un saignement minimal. B. Ensemble capteur («Système B»), implanté de façon permanente chez le rat.Les exigences de détection des pics en temps réel pour les CNC sont différentes de la plupart des études neurophysiologiques traditionnelles. Alors que la plupart des électrophysiologistes mettent les données hors ligne et consacrent des efforts considérables au rejet des événements de pic faussement positifs, les événements NQI doivent être détectés en temps réel et les paramètres de détection des pics doivent maximiser les performances de décodage. À l'aide de notre logiciel de détection de crête en ligne dédié, nous avons constaté qu'un filtre de résolution qui autorise les faux positifs de ± 0,2 Hz est préférable à la définition de seuils stricts qui peuvent rejeter les crêtes réelles (données non présentées).Compte tenu de ces considérations, nous avons fixé un seuil à> 0,35 Hz pour déterminer le nombre d'électrodes qui ont enregistré des pics. Comme nous ne trions généralement pas les données par pics, nous ne signalons pas plusieurs unités par canal. Les décodeurs IMC fonctionnent généralement sans tri avec une perte minimale de performances [36, 37]. De plus, des résultats récents montrent que le tri des pics n'est pas nécessaire pour une évaluation précise de la dynamique d'une population neuronale [38].Les données d'une expérience récente utilisant le système A sont présentées sur la Fig. 7 et fig. 8. Dans cette expérience, 40 tentatives d'insertion sur 44 ont réussi (90%) pour un total de 1280 électrodes implantées, dont 1020 ont été enregistrées simultanément. Les signaux à large bande enregistrés à partir des filaments présentés montrent à la fois les potentiels locaux et le pic d'activité de la figure 7. Un exemple de la sortie du système de détection de crête est montré sous forme de trame sur la Fig. 8. Dans cet exemple, deux configurations d'enregistrement se chevauchant ont été utilisées pour enregistrer à partir des 1 280 canaux implantés. Dans ce réseau, notre rendement de pointe s'élevait à 53,4% des canaux, et de nombreux pics sont apparus sur plusieurs canaux voisins, comme cela a été observé dans d'autres expériences avec une densité d'électrodes élevée [16, 17, 21]. Sur d'autres tableaux du système A, nous avons obtenu un résultat de 59,10 ± 5,74% (moyenne ± erreur standard de la moyenne) en 19 opérations avec un maximum de 85,5%.
Figure 6 : Implantation et assemblage du fil. A. Un exemple d'image en direct montrant la surface du cortex avec des fils implantés et un saignement minimal. B. Ensemble capteur («Système B»), implanté de façon permanente chez le rat.Les exigences de détection des pics en temps réel pour les CNC sont différentes de la plupart des études neurophysiologiques traditionnelles. Alors que la plupart des électrophysiologistes mettent les données hors ligne et consacrent des efforts considérables au rejet des événements de pic faussement positifs, les événements NQI doivent être détectés en temps réel et les paramètres de détection des pics doivent maximiser les performances de décodage. À l'aide de notre logiciel de détection de crête en ligne dédié, nous avons constaté qu'un filtre de résolution qui autorise les faux positifs de ± 0,2 Hz est préférable à la définition de seuils stricts qui peuvent rejeter les crêtes réelles (données non présentées).Compte tenu de ces considérations, nous avons fixé un seuil à> 0,35 Hz pour déterminer le nombre d'électrodes qui ont enregistré des pics. Comme nous ne trions généralement pas les données par pics, nous ne signalons pas plusieurs unités par canal. Les décodeurs IMC fonctionnent généralement sans tri avec une perte minimale de performances [36, 37]. De plus, des résultats récents montrent que le tri des pics n'est pas nécessaire pour une évaluation précise de la dynamique d'une population neuronale [38].Les données d'une expérience récente utilisant le système A sont présentées sur la Fig. 7 et fig. 8. Dans cette expérience, 40 tentatives d'insertion sur 44 ont réussi (90%) pour un total de 1280 électrodes implantées, dont 1020 ont été enregistrées simultanément. Les signaux à large bande enregistrés à partir des filaments présentés montrent à la fois les potentiels locaux et le pic d'activité de la figure 7. Un exemple de la sortie du système de détection de crête est montré sous forme de trame sur la Fig. 8. Dans cet exemple, deux configurations d'enregistrement se chevauchant ont été utilisées pour enregistrer à partir des 1 280 canaux implantés. Dans ce réseau, notre rendement de pointe s'élevait à 53,4% des canaux, et de nombreux pics sont apparus sur plusieurs canaux voisins, comme cela a été observé dans d'autres expériences avec une densité d'électrodes élevée [16, 17, 21]. Sur d'autres tableaux du système A, nous avons obtenu un résultat de 59,10 ± 5,74% (moyenne ± erreur standard de la moyenne) en 19 opérations avec un maximum de 85,5%. Figure 7 : Gauche: signaux neuronaux à large bande (non filtrés) obtenus simultanément à partir d'un brin (32 canaux) implanté dans le cortex cérébral du rat. Chaque canal (rangée) correspond à une partie de l'électrode sur le filament (schéma à gauche; sections espacées de 50 μm). Les pics et les potentiels de champ locaux sont évidents. À droite: formes d'ondes prospectives (non triées); les chiffres indiquent l'emplacement du canal dans le flux. La forme d'onde moyenne est représentée en noir.
Figure 7 : Gauche: signaux neuronaux à large bande (non filtrés) obtenus simultanément à partir d'un brin (32 canaux) implanté dans le cortex cérébral du rat. Chaque canal (rangée) correspond à une partie de l'électrode sur le filament (schéma à gauche; sections espacées de 50 μm). Les pics et les potentiels de champ locaux sont évidents. À droite: formes d'ondes prospectives (non triées); les chiffres indiquent l'emplacement du canal dans le flux. La forme d'onde moyenne est représentée en noir.6. Discussion
Nous avons décrit un NIR avec un nombre élevé de canaux et une résolution d'un pic. Il est basé sur des capteurs polymères flexibles, un système d'entrée robotique et une électronique spéciale à faible puissance. Ce système a deux objectifs principaux: il s'agit d'une plate-forme de recherche à utiliser chez les rongeurs et sert de prototype pour les futurs implants cliniques humains. La capacité d'itérer rapidement les structures et de tester les rongeurs vous permet d'améliorer rapidement les appareils, les processus de production et les logiciels. Parce qu'il s'agit d'une plate-forme de recherche, le système utilise une connexion filaire pour maximiser le débit de streaming des données brutes. Ceci est important pour évaluer les performances et est essentiel pour développer des algorithmes de traitement et de décodage du signal. En revanche,les dispositifs cliniques qui seront fabriqués sur cette plate-forme seront entièrement implantables, ce qui nécessitera un emballage hermétique, et aura une compression de signal intégrée, une consommation d'énergie réduite, un transfert d'énergie sans fil et une télémétrie des données à travers la peau sans utiliser de fils. Figure 8 : Nos appareils permettent la détection d'une activité neuronale étendue, répartie sur plusieurs zones du cerveau et des couches corticales. À gauche: les sites d'injection (cercles colorés) sont indiqués sur l'image du cerveau du rongeur. [35] Droite: raster de 1020 canaux enregistrés simultanément triés par flux (la couleur correspond au point d'insertion). Barre latérale: une image agrandie des pics d'un fil. Ce fil correspond à celui montré sur la fig.
Figure 8 : Nos appareils permettent la détection d'une activité neuronale étendue, répartie sur plusieurs zones du cerveau et des couches corticales. À gauche: les sites d'injection (cercles colorés) sont indiqués sur l'image du cerveau du rongeur. [35] Droite: raster de 1020 canaux enregistrés simultanément triés par flux (la couleur correspond au point d'insertion). Barre latérale: une image agrandie des pics d'un fil. Ce fil correspond à celui montré sur la fig. 7.
La modulation de l'activité neuronale sera un élément important des interfaces cerveau-machine cliniques de prochaine génération [39], par exemple, pour fournir un sens du toucher ou de la proprioception pour contrôler les mouvements neuro-prothétiques [40, 41]. Par conséquent, nous avons développé un ASIC Neuralink capable de stimulation électrique sur chaque canal, bien que nous n'ayons pas démontré ces capacités ici.Ce système NQI présente plusieurs avantages par rapport aux approches précédentes. La taille et la composition des sondes à couches minces sont mieux adaptées aux propriétés du tissu cérébral que les sondes au silicium couramment utilisées, et peuvent donc présenter une biocompatibilité accrue [28, 21]. De plus, la possibilité de choisir où insérer nos sondes, y compris dans les structures sous-corticales, nous permet de créer nos propres géométries de tableaux pour cibler certaines zones du cerveau sans endommager les réseaux vasculaires. Cette fonctionnalité est importante pour créer un NKI haute performance, car la distribution des électrodes peut être ajustée en fonction des exigences de la tâche. EnfinLa miniaturisation et la conception de Neuralink ASIC offrent une grande flexibilité dans la conception du système et prennent en charge un très grand nombre de canaux dans une taille pratique et une faible consommation d'énergie.Fondamentalement, notre approche des interfaces cerveau-machine est extensible et évolutive. Nous rapportons ici l'enregistrement simultané à large bande de plus de 3 000 électrodes insérées dans un rat en mouvement libre. Dans un cerveau plus grand, plusieurs appareils avec cette architecture peuvent être facilement implantés, et donc nous pourrions interagir avec un nombre beaucoup plus important de neurones sans réingénierie sérieuse. La poursuite du développement de la robotique chirurgicale peut nous permettre d'y parvenir de la même manière sans augmenter considérablement le temps de la chirurgie.Avant qu'un appareil à large bande passante devienne adapté à un usage clinique, il sera nécessaire de résoudre un certain nombre de problèmes technologiques graves, mais maintenant il est facile d'imaginer qu'un tel appareil permettra aux patients souffrant de lésions de la moelle épinière de contrôler intelligemment une souris et un clavier numériques. Et en combinaison avec l'amélioration rapide des méthodes de stimulation de la moelle épinière [42], cette approche pourrait à l'avenir restaurer la fonction motrice. Les interfaces neuronales à haut débit doivent fournir de nombreuses nouvelles options thérapeutiques.7. Remerciements
Nous tenons à remercier le Livermore National Laboratory. Lawrence (LLNL), Berkeley Marvell Nanotechnology Laboratory, Berkeley Wireless Research Center (BWRC), Stanford Nanotechnology Center, et anciens et actuels employés de Neuralink pour leurs contributions aux travaux décrits ici.8. Vidéos supplémentaires
Vidéo 1 : Une série de six insertions d'un robot neurochirurgical dans une imitation d'agarose de tissu cérébral. La capture du fil par une aiguille se produit en dehors du cadre. Les changements de couleur de fond sont causés par l'éclairage à différentes fréquences de lumière à différentes étapes du processus de pansement et d'insertion. Un fil a été inséré avant le début de la vidéo. Vidéo .Vidéo 2 : Visualisation tridimensionnelle du processus d'implantation du fil (mêmes données que sur la Fig. 8). L'insertion de fil est visualisée dans le même ordre que dans l'opération réelle, mais en mode de lecture rapide. La taille du filetage et la profondeur d'insertion sont typiques. Les coordonnées stéréotaxiques de chaque insert sont présentées dans un jeu de données fourni par Calabrese et ses collègues [35]. Vidéo .9. Sources[1] Leigh R. Hochberg et coll. "Contrôle d'ensemble neuronal des prothèses par un humain atteint de tétraplégie." Dans: Nature 442 (2006), p. 164. issn: 1476-4687.
[2] Wei Wang et al. «Une interface cérébrale électrocorticographique chez un individu atteint de tétraplégie.» Dans: PLoS ONE 8 (2013), e55344.
[3] Tyson Aflalo et al. "Décodage de l'imagerie motrice à partir du cortex pariétal postérieur d'un humain tétraplégique." Dans: Science 348 (2015), pp. 906–910. issn: 0036-8075.
[4] Leigh R. Hochberg et coll. "Atteignez et saisissez les personnes atteintes de tétraplégie à l'aide d'un bras robotisé contrôlé par les neurones." Dans: Nature 485 (2012), p. 372. issn: 1476-4687.
[5] Jennifer L Collinger et al. "Contrôle neuroprothétique haute performance par un individu atteint de tétraplégie." Dans: The Lancet 381 (2013), pp. 557-564. issn: 0140-6736.
[6] Gopala K. Anumanchipalli, Josh Chartier et Edward F. Chang. "Synthèse de la parole à partir du décodage neuronal des phrases prononcées." Dans: Nature 568 (2019), pp. 493–498. issn: 0028-0836.
[7] György Buzsáki, Costas A. Anastassiou et Christof Koch. "L'origine des champs et courants extracellulaires - EEG, ECoG, LFP et pointes." Dans: Nature Reviews Neuroscience 13 (2012), p. 407. issn: 1471-0048.
[8] Bijan Pesaran et al. "Enquêter sur la dynamique du cerveau à grande échelle à l'aide d'enregistrements potentiels sur le terrain: analyse et interprétation." Dans: Nature Neuroscience 21 (2018), pp. 903–919. issn: 1097-6256.
[9] Taro Kaiju et al. "Enregistrement ECoG à haute résolution spatio-temporelle des potentiels évoqués somatosensoriels avec des réseaux de micro-électrodes flexibles." Dans: Frontiers in Neural Circuits 11 (2017), p. 20.
[10] Rafael Yuste. "De la doctrine des neurones aux réseaux de neurones." Dans: Nature Reviews Neuroscience 16 (2015), pp. 487 à 497. issn: 1471-003x.
[11] Guosong Hong et Charles M Lieber. "Nouvelles technologies d'électrodes pour les enregistrements neuronaux." Dans: Nature Reviews Neuroscience (2019), pp. 1-16. issn: 1471-003X.
[12] Edwin M. Maynard, Craig T. Nordhausen et Richard A. Normann. "Le réseau d'électrodes intracorticales de l'Utah: une structure d'enregistrement pour les interfaces cerveau-ordinateur potentielles." Dans: Electroencephalography and Clinical Neurophysiology 102.3 (1997), pp. 228-239. issn: 0013-4694.
[13] Miguel AL Nicolelis et al. "Enregistrements chroniques, multisites et multiélectrodes chez des singes macaques." Dans: Actes de l'Académie nationale des sciences 100.19 (2003), pp. 11041-11046. issn: 0027-8424. eprint:
www . pnas.org/content/100/19/11041.full.pdf.
[14] KD Wise et al. «Microélectrodes, microélectronique et microsystèmes neuronaux implantables.» Dans: Actes de l'IEEE 96.7 (2008), pp. 1184-1202. issn: 0018-9219.
[15] Nicholas M. Dotson et al. "Un système d'enregistrement microdrive semi-chronique à grande échelle pour les primates non humains." Dans: Neuron 96 (2017), 769–782.e2. issn: 0896-6273.
[16] James J. Jun et al. "Sondes au silicium entièrement intégrées pour l'enregistrement haute densité de l'activité neuronale." Dans: Nature 551 (2017), p. 232. issn: 1476-4687.
[17] Gian Nicola Angotzi et al. "SiNAPS: une sonde CMOS à capteur de pixels actifs implantable pour des enregistrements neuronaux simultanés à grande échelle." Dans: Biocapteurs et bioélectronique 126 (2018), pp. 355-364. issn: 0956-5663.
[18] Felix Deku et al. "Matrices d'ultramicroélectrodes en carbure de silicium amorphe pour la stimulation et l'enregistrement neuronaux." Dans: Journal of Neural Engineering 15.1 (2018), p. 016007.
[19] Aziliz Lecomte, Emeline Descamps et Christian Bergaud. "Un examen des considérations mécaniques pour les sondes neurales implantées de façon chronique." Dans: Journal of Neural Engineering 15 (2018), p. 031001. issn: 1741-2552.
[20] Dion Khodagholy et al. "NeuroGrid: enregistrement des potentiels d'action de la surface du cerveau." Dans: Nature Neuroscience 18 (2014), pp. 310-315. issn: 1097-6256.
[21] Jason E. Chung et coll. «Enregistrements électrophysiologiques haute densité, de longue durée et multi-régions utilisant des réseaux d'électrodes en polymère.» Dans: Neuron 101 (2019), 21-31.e5. issn: 0896-6273.
[22] Stephan L. Chorover et Anne-Marie Deluca. "Une nouvelle électrode multiple douce pour l'enregistrement chronique d'unité unique chez les animaux en mouvement." Dans: Physiology & Behavior 9 (1972), pp. 671–674. issn: 0031-9384.
[23] Jia Liu et al. «Electronique injectable par seringue». Dans: Nature Nanotechnology 10 (2015), pp. 629-636. issn: 1748-3387.
[24] Tian-Ming Fu et al. "Cartographie du cerveau chronique stable à long terme au niveau d'un seul neurone." Dans: Nature Methods 13 (2016), pp. 875–882. issn: 1548-7091.
[25] Flavia Vitale et al. "Microactivation fluidique des électrodes flexibles pour l'enregistrement neuronal." Dans: Nano Letters 18.1 (2018), pp. 326–335. eprint:
doi.org/10.1021/acs.nanolett.7b04184 .
[26] Lan Luan et al. «Les sondes nanoélectroniques ultra-flexibles forment une intégration neurale fiable, sans cicatrice gliale.» Dans: Science Advances 3 (2017), e1601966. issn: 2375-2548.
[27] Marc D. Ferro et al. «NeuroRoots, un appareil d'interface cerveau-machine bio-inspiré et sans couture pour un enregistrement à long terme.» Dans: bioRxiv (2018), p. 460949.
[28] Timothy L. Hanson et al. «La« machine à coudre »pour l'enregistrement neuronal mini-invasif». Dans: bioRxiv (2019). eprint:
www.biorxiv.org/content/early/2019/03/14/578542.full.pdf .
[29] Kip A Ludwig et al. "Enregistrements neuronaux chroniques utilisant des réseaux de microélectrodes de silicium déposés par voie électrochimique avec un film de poly (3,4-éthylènedioxythiophène) (PEDOT)." Dans: Journal of Neural Engineering 3 (2006), p. 59. issn: 1741-2552.
[30] Seth J. Wilks et al. "Poly (3,4-éthylènedioxythiophène) comme matériau d'interface micro-neuronal pour l'électrostimulation." Dans: Frontiers in Neuroengineering 2 (2009), p. 7. issn: 1662-6443.
[31] JD Klein, SL Clauson et SF Cogan. "Morphologie et capacité de charge des films d'oxyde d'iridium pulvérisés." Dans: Journal of Vacuum Science & Technology A: Vacuum, Surfaces, and Films 7 (1989), pp. 3043-3047. issn: 0734-2101.
[32] SF Cogan, TD Plante et J. Ehrlich. "Films d'oxyde d'iridium pulvérisé (SIROF) pour électrodes de stimulation et d'enregistrement neurales à faible impédance." Dans: 26e Conférence internationale annuelle de l'IEEE Engineering in Medicine and Biology Society 2 (2004), pp. 4153-4156.
[33] Tarun Saxena et al. «L'impact de la rupture chronique de la barrière hémato-encéphalique sur la fonction des électrodes intracorticales». Dans: Biomaterials 34 (2013), pp. 4703–4713. issn: 0142-9612.
[34] Joshua H. Siegle et al. «Open Ephys: une plate-forme open source basée sur des plugins pour l'électrophysiologie multicanal.» Dans: J. Neural Eng. 14 (2017), pp. 1–13.
[35] E. Calabrese et al. "Un atlas histologique de résonance magnétique quantitative du développement du cerveau de rat postnatal avec des estimations régionales de la croissance et de la variabilité." Dans: NeuroImage 71 (2013), pp. 196–201.
[36] Sonia Todorova et al. "Trier ou ne pas trier: l'impact du tri de pointes sur les performances de décodage neuronal." Dans: Journal of Neural Engineering 11 (2014), p. 056005. issn: 1741-2552.
[37] Breanne P. Christie et al. "Comparaison du tri des pointes et du seuillage des formes d'onde de tension pour les performances de l'interface cerveau-machine intracorticale." Dans: Journal of Neural Engineering 12 (2015), p. 016009. issn: 1741-2552.
[38] Eric M. Trautmann et al. "Estimation précise de la dynamique de la population neuronale sans tri de pointes." Dans: Neuron (2019). issn: 0896-6273.
[39] Andy Zhou et al. "Un dispositif de neuromodulation sans fil et sans artefact à 128 canaux pour la stimulation et l'enregistrement en boucle fermée chez des primates non humains." Dans: Nature Biomedical Engineering 3 (2019), pp. 15-26.
[40] Joseph E O'Doherty et al. "Exploration tactile active utilisant une interface cerveau-machine-cerveau". Dans: Nature 479 (2011). issn: 1476-4687.
[41] Sharlene N Flesher et coll. "La sensation tactile restaurée améliore le contrôle du bras neuroprothétique." Dans: bioRxiv (2019), p. 653428.
[42] Fabien B. Wagner et al. "La neurotechnologie ciblée rétablit la marche chez l'homme souffrant de lésions de la moelle épinière." Dans: Nature 563 (2018), pp. 65–71. issn: 0028-0836.