Aujourd'hui, je vais dire et montrer comment répéter l'effet de la lévitation ultrasonique de mes propres mains à la maison.
Dans les articles précédents,
un ,
deux . J'ai démontré une pseudo-lévitation. Cette fois, tout est réel. Je vais commencer par la théorie.
Vibrations sonores
Pour comprendre toute l'essence de l'effet de lévitation, vous devez comprendre ce qu'est une onde sonore et une onde stationnaire.
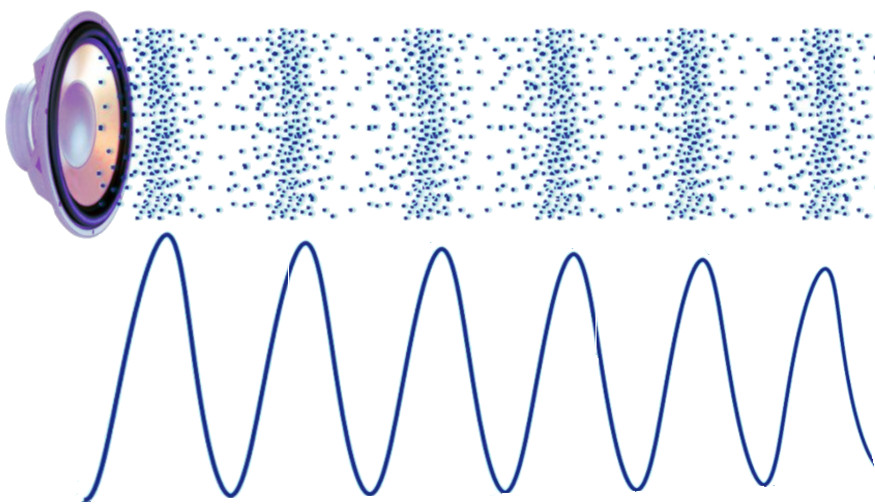
Je vais donc commencer par eux. Une onde acoustique se propage dans toutes les directions et se compose de deux demi-ondes, positive et négative. La demi-onde positive est une zone de compression ou haute pression, à l'avenir je l'appellerai la compression, et la demi-onde négative la zone de décharge, nous l'appellerons la décompression.
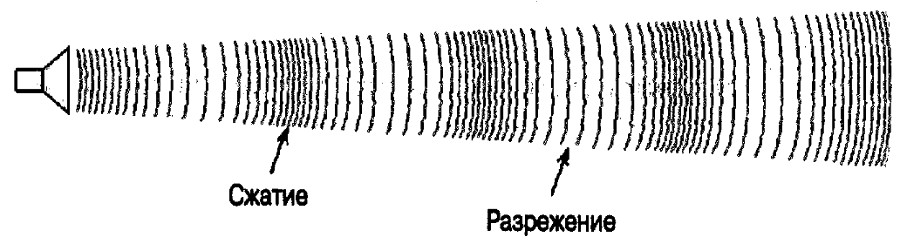
Dans la pratique, cela ressemble à ceci: le diffuseur du haut-parleur crée une compression lorsqu'il se déplace vers l'extérieur et se décompresse lorsqu'il se déplace vers l'intérieur. Ceci est clairement montré dans l'image.
La puissance d'onde maximale est créée près du diffuseur dynamique de tête et, en s'éloignant de l'émetteur, il perd progressivement sa puissance, plus le haut-parleur est faible, plus il est faible.
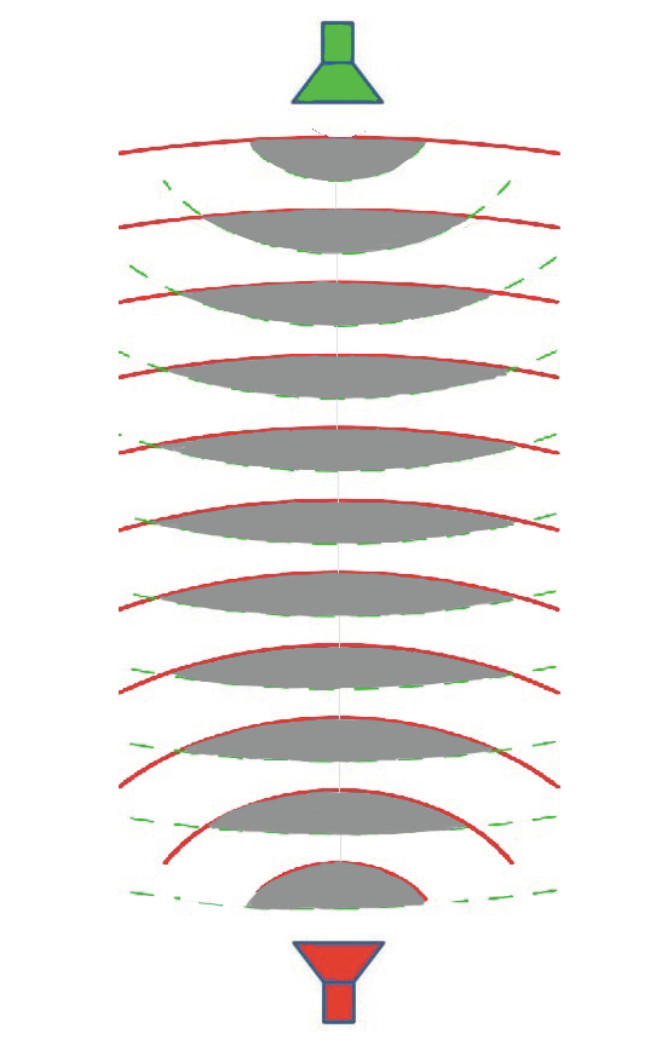
Une onde stationnaire est une onde qui se forme lorsqu'elle se superpose à deux contre-propagations, coïncidant en phase et avec la même fréquence d'onde. Si une onde ordinaire perd sa puissance dans le processus de propagation dans l'espace, alors les ondes stationnaires à de petites distances forment des nœuds avec une puissance approximativement égale. Ceci est réalisé en pliant les ondes multidirectionnelles. La vague d'affaiblissement est amplifiée par la vague venant en sens inverse. Pour comprendre comment cela se produit, regardez l'image ci-dessous. Les nœuds ou dans nos cas les étagères des ondes stationnaires sont surlignés en gris. Sur ces étagères (noeuds) et objets retenus.
 La longueur d'onde
La longueur d'onde est la vitesse du son divisée par la fréquence des oscillations. À une température de 20 ° C et une humidité de 50%, le son se propage dans un tel environnement à une vitesse de 340 m / s. La fréquence de résonance de notre émetteur piézoélectrique est d'environ 40 000 Hz. En conséquence, nous obtenons une longueur d'onde de 340 000 mm / 40 000 Hz = 8,5 mm. La longueur d'onde stationnaire sera la même de 8,5 mm.
Les émetteurs peuvent être situés à des distances différentes les uns des autres, mais il doit toujours s'agir d'un multiple de la longueur d'onde. Plus la distance entre les émetteurs est petite, plus les nœuds de l'onde stationnaire sont puissants. Plus il y a d'espace entre les émetteurs acoustiques, plus il y a de nœuds entre eux, mais la puissance des nœuds s'affaiblit et vice versa. Vous devez également comprendre que pour maintenir un grand nombre d'objets dans les nœuds des ondes et à une plus grande distance entre les émetteurs ultrasoniques, des têtes piézo-électriques plus puissantes seront nécessaires. Par exemple, à partir de radars de stationnement de voiture ou d'humidificateurs domestiques. Dans cet article, je considère l'émetteur ultrasonique le plus abordable et le plus abordable. Qui peut être retiré du
télémètre HC-SR04 .
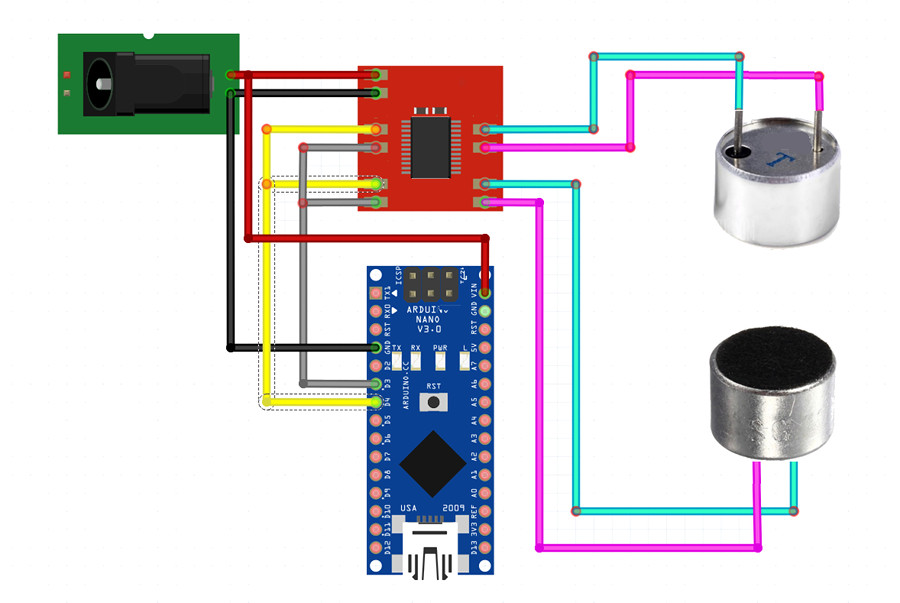
Schéma de connexion - J'ai utilisé
Arduino nano et
le pilote de moteur MX1508 , j'aurais pu le faire avec le générateur NE555, et en tant qu'amplificateur pour les émetteurs, utiliser la puce MAX232 installée sur le télémètre HC-SR04, mais j'ai choisi un chemin plus simple pour moi qui m'a fait gagner du temps. Puisqu'il ne m'a pas fallu plus de 5 minutes pour assembler le lévitron acoustique. J'ai fait les connexions avec le kit de fils Dupont.
Description du croquis Arduino
Le code n'a rien de spécial. Tout se résume à la mise en place d'une minuterie et au saccage du port D Arduino. Pour ce faire, mettez Timer1 en mode de réinitialisation à coïncidence (CTC) et maintenant, lorsque les valeurs du registre de compte TCNT1 coïncident avec le nombre spécifié dans le registre de comparaison OCR1A, une interruption sera déclenchée, dans le processeur dont tout le port D sera inversé. Après cela, le registre de comptage sera réinitialisé et après la sortie Le processeur commencera le processus de comptage sur un nouveau.
La valeur du registre OCR1A dont nous avons besoin est calculée comme suit: puisque le diviseur du registre TCCR1B est éteint, nous prenons la fréquence d'horloge de 16 000 000 Hz et divisons par la fréquence d'interruption souhaitée 80 000 Hz, par conséquent nous obtenons le nombre 200, ce sera notre valeur pour le registre OCR1A.
Pourquoi 80 kHz, pas 40 kHz, demandez-vous? Parce que la période dans le gestionnaire est formée de deux opérations d'interruption. Lors de la première opération, les sorties forment D3 = 0 et D4 = 1, et dans la seconde, D3 = 1 et D4 = 0.
Code pour Arduino
volatile uint8_t portD3_D4 = 8; // D3 D4 void setup() { pinMode(3, OUTPUT); pinMode(4, OUTPUT); // Timer1 TCNT1 = 0; TCCR1A = 0; TCCR1B = 0; OCR1A = 199; // 16 / 80 = 200 TCCR1B = (1 << WGM12)|(1 << CS10); // CTC, TIMSK1 |= (1 << OCIE1A); // } void loop () {} ISR (TIMER1_COMPA_vect) // { PORTD = portD3_D4; // portD3_D4 = 255-portD3_D4;// }