«Une mauvaise journée de pêche vaut mieux qu'une bonne journée de travail.» Il existe un grand nombre d'alarmes électroniques de morsure. Ma version se distingue par la présence du WiFi avec une application WEB, un accéléromètre et une recharge sans fil, classe de protection IP68. Le cerveau de l'appareil est le plus petit ordinateur Linux
Vocore2, l' accéléromètre
MPU6050 , la charge Qi basée sur
BQ51050BRHLT . Les sources peuvent être téléchargées ici
Github .
Spécifications FishSensor:
- Système d'exploitation OpenWrt 15.05.1 "Chaos Calmer";
- Connexion WiFi avec des appareils mobiles;
- portée de communication 30-50 m;
- contrôle des morsures - son (Android uniquement), visuel;
- réglage à distance de la sensibilité, de la mélodie, du volume;
- Internet est facultatif;
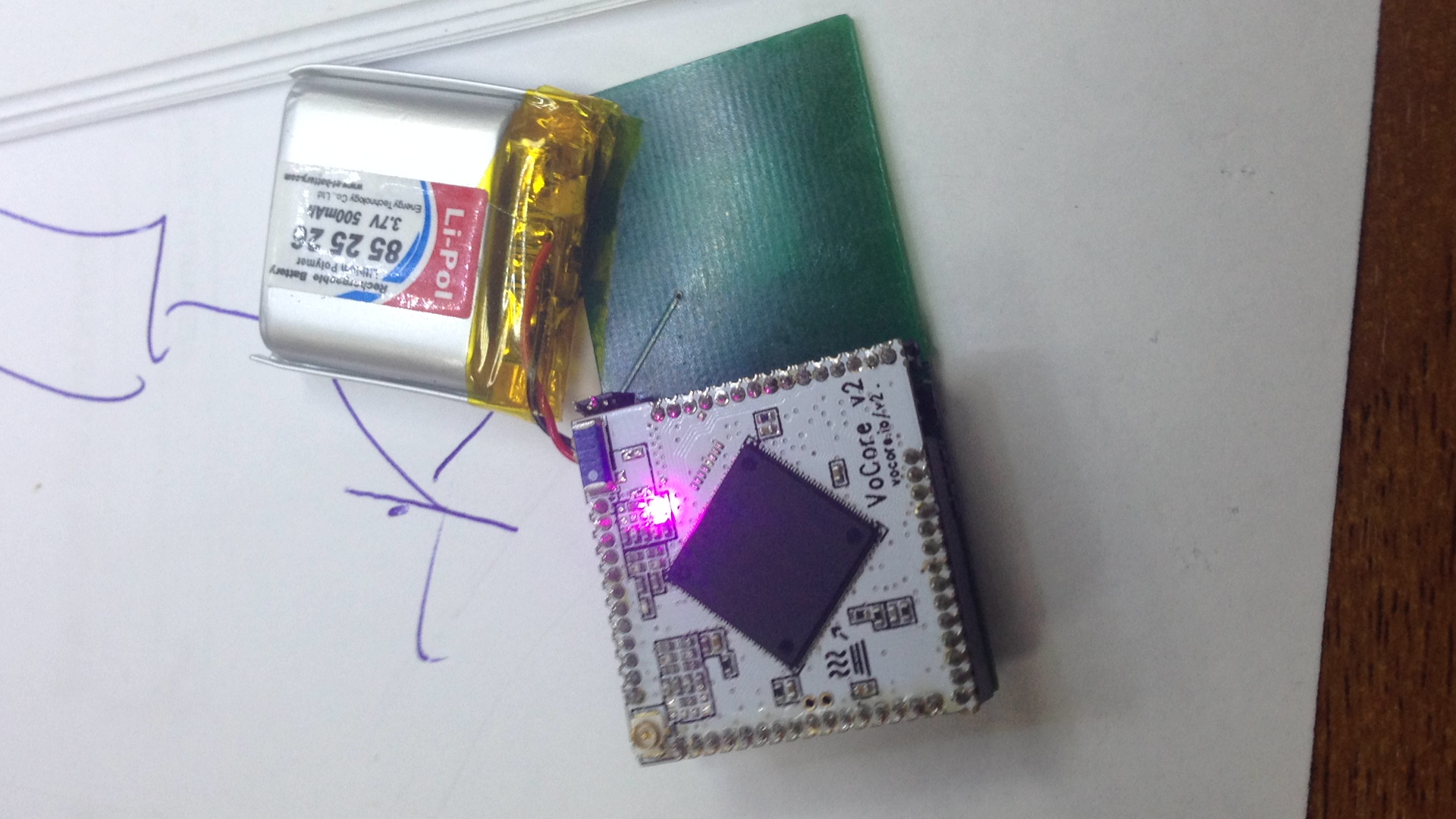
- 3 heures d'autonomie de la batterie (batterie LiPo 500mAH)
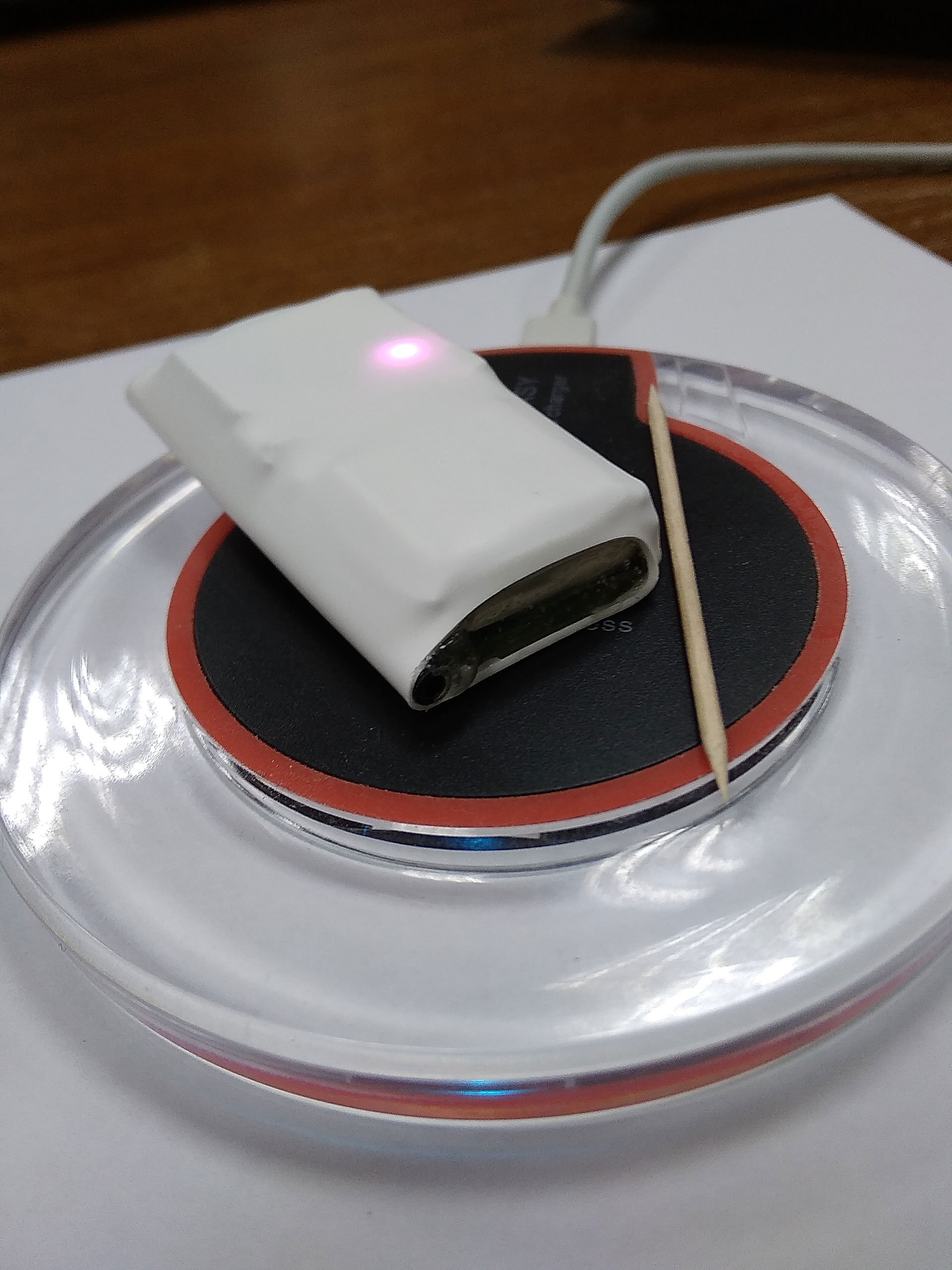
- charge Qi sans fil (jusqu'à une heure et demie complète)
- classe de protection IP68;
- dimensions hors tout 60 x 30 x 11 mm;
- poids 22 g
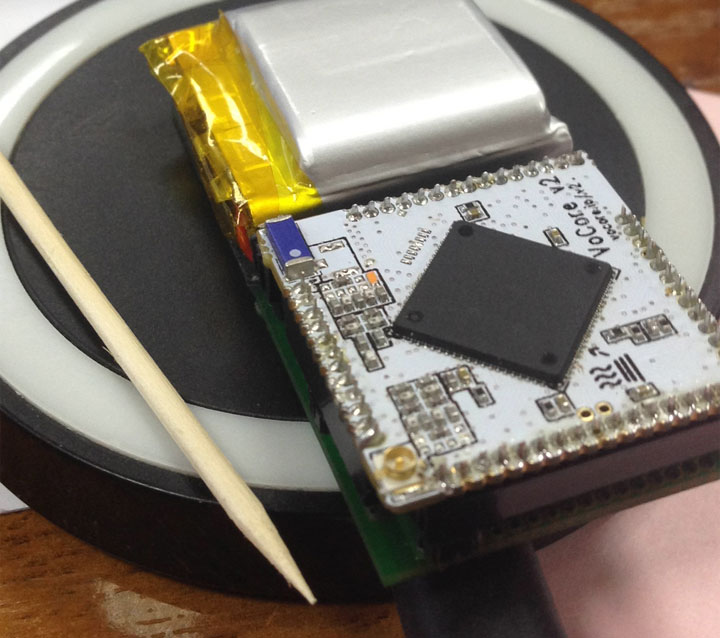
L'appareil est structurellement une carte sur laquelle se trouvent l'antenne du récepteur et le pilote de charge Qi
BQ51050BRHLT , l'accéléromètre
MPU6050 , le connecteur
Vocore2 , la batterie. Étanchéité à la poussière et à l'eau grâce à un tube thermorétractable, aux extrémités il est rempli de composé silicone Rexant PK-68. Tirez le fil de pêche à travers un tube en plastique d'un diamètre intérieur de 2 mm.
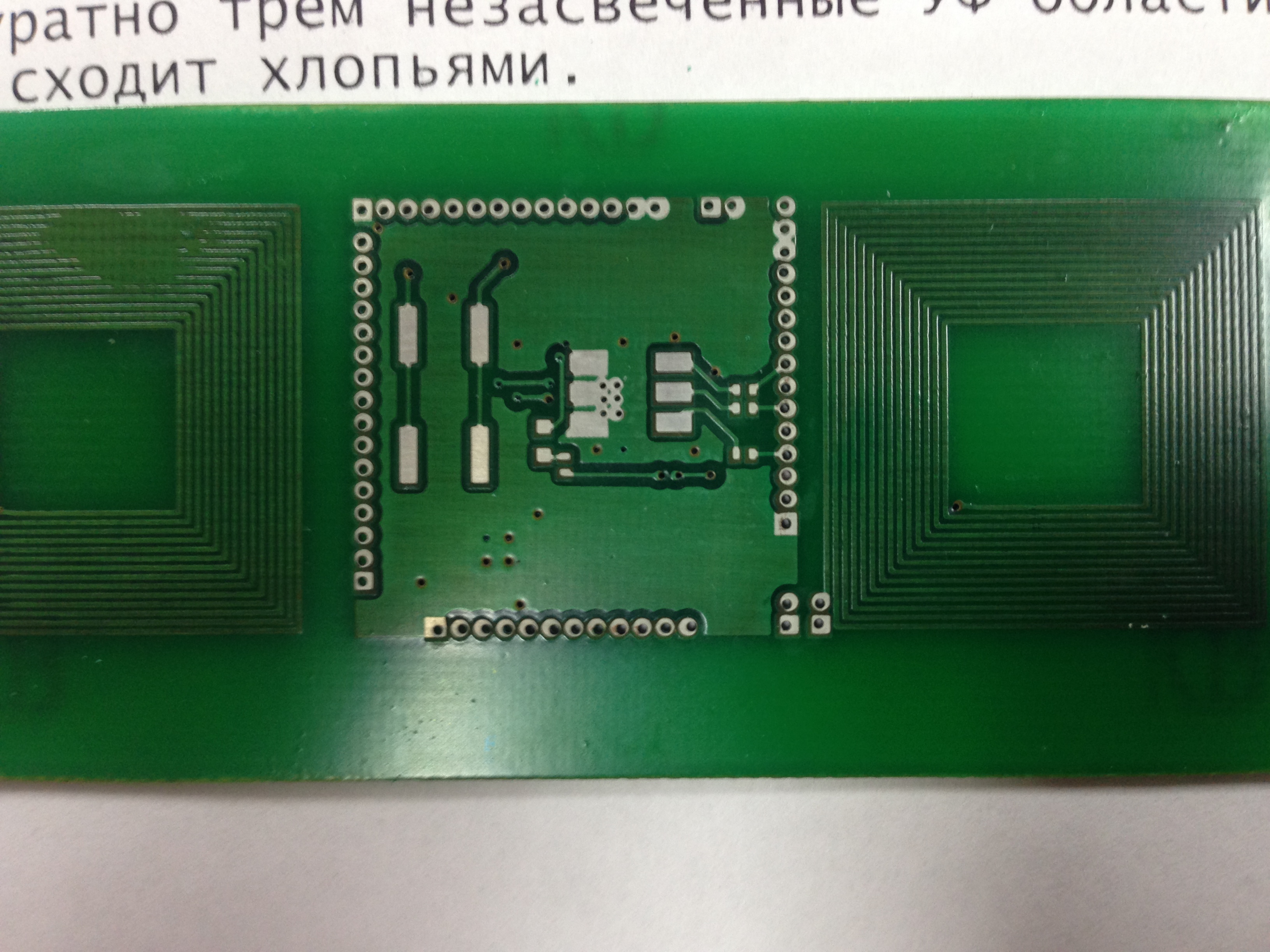
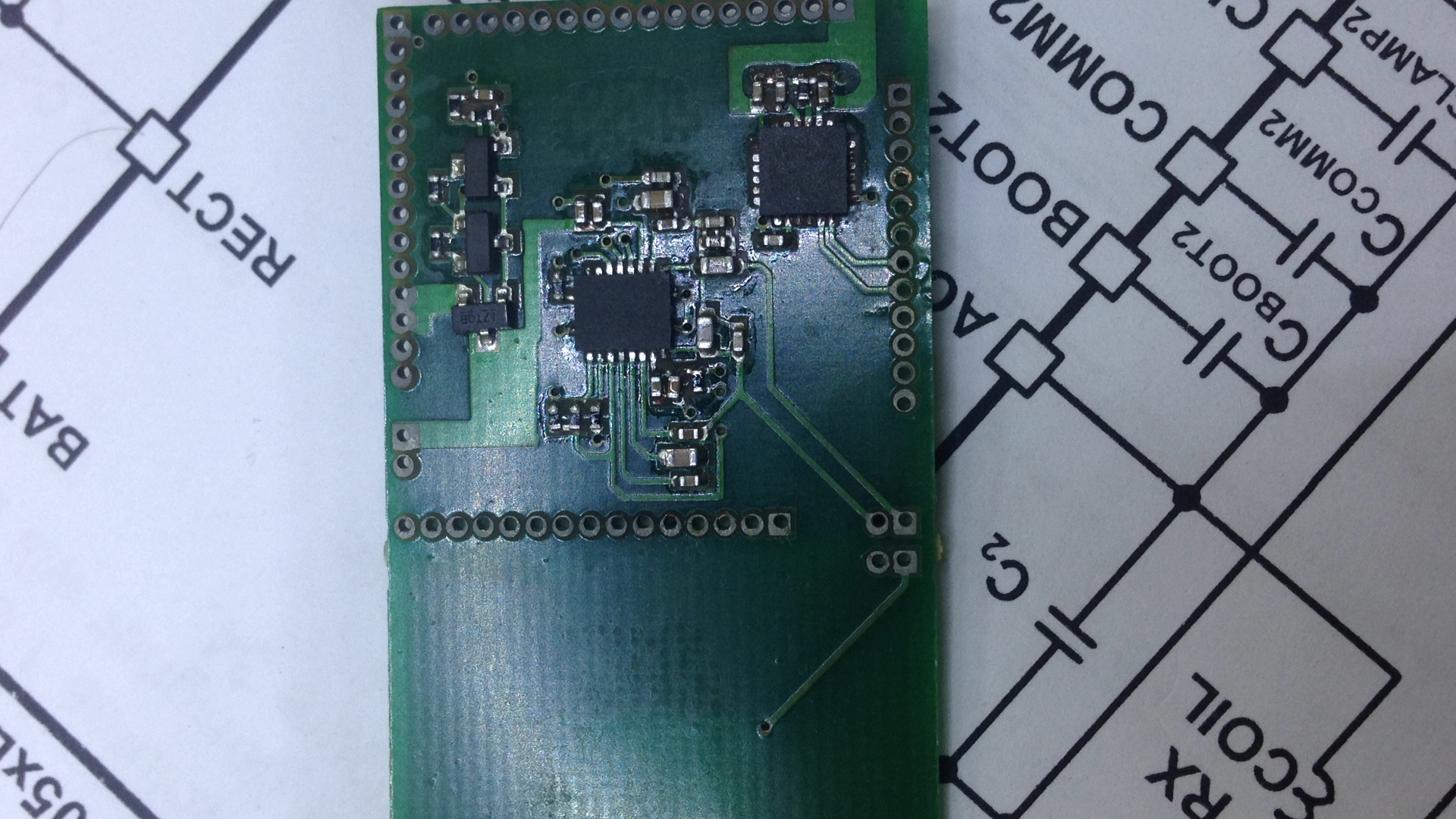
Fabrication de PCB
La question était de savoir s'il serait possible de fabriquer une bobine d'inductance de récepteur Qi avec une taille de 25 x 25 mm, 14 tours, une épaisseur de piste de 0,3 mm, un espace de 0,2 mm et quelle serait l'inductance réelle de la bobine. Les données calculées ont été confirmées et ont donné une inductance de 4 μH.


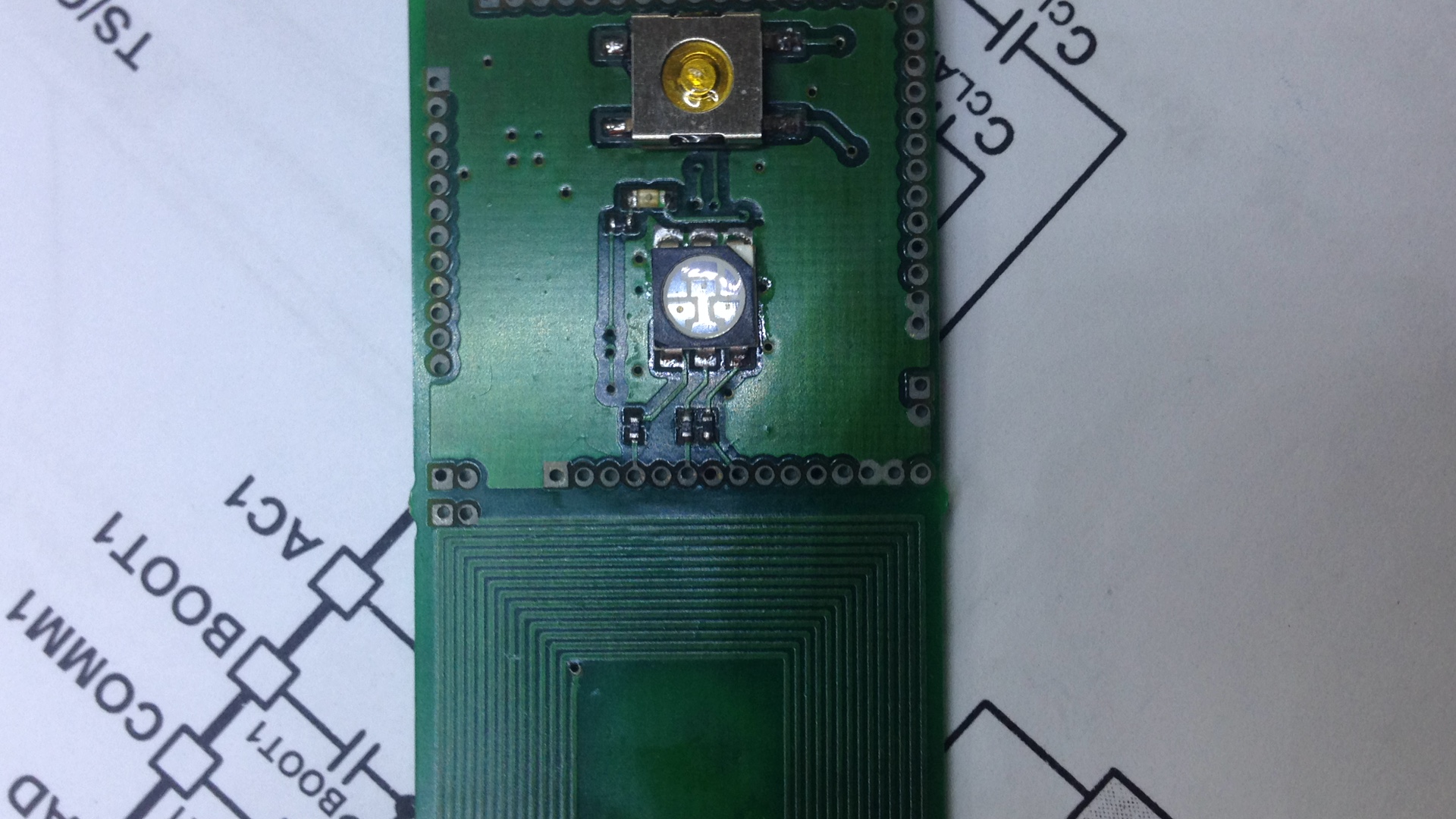
Éléments à souder
Réglage de la charge Qi
Un point intéressant était le réglage de la résonance du circuit oscillatoire. Les recommandations et les formules de calcul de la fiche technique sur
BQ51050BRHLT ont été confirmées. Inductance 4 µH, inductance avec un blindage en ferrite 7 µH, condensateur en parallèle 6,5 nF, condensateur en série avec bobine 422 nf. Le facteur de qualité du circuit s'est avéré très faible 22 en raison de la grande résistance de bobine de 1,7 Ohms (un facteur de qualité de plus de 500 était recommandé par une fiche technique). Néanmoins, tout fonctionnait parfaitement, résonance stable à une distance de 10 mm de la bobine émettrice.

Erreur de calcul constructive - l'indicateur de charge est situé sur le côté de l'antenne, c'est-à-dire il n'est pas visible lorsque FishSensor est sur l'émetteur du chargeur. Mais le processus de charge est visible sur l'indicateur de l'émetteur Qi lui-même.
Configuration de l'accéléromètre
Logiciels
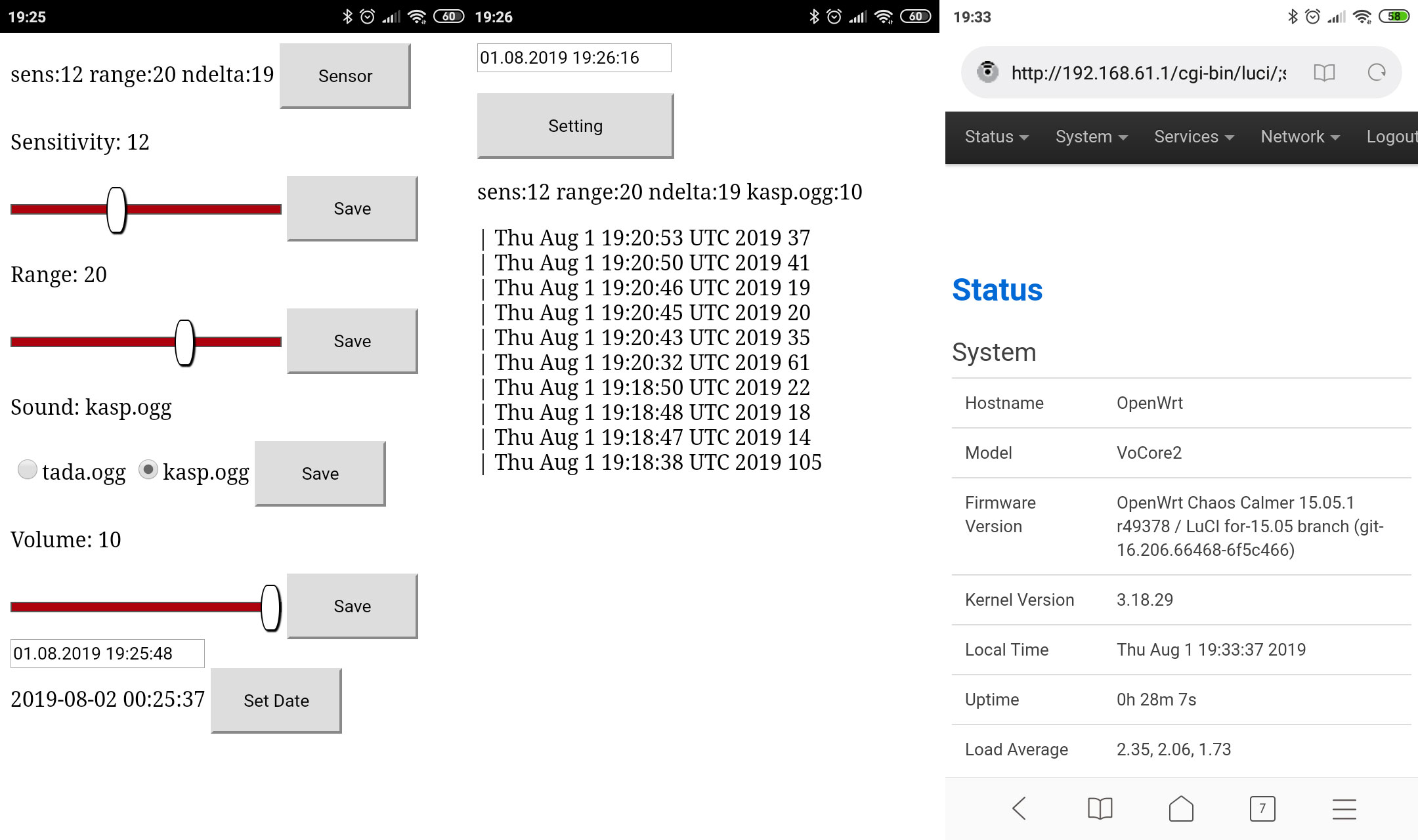
À bord de Vocore2 installé en usine, OC OpenWrt 15/05/1 «Chaos Calmer». L'appareil est accessible via WiFi via un navigateur grâce au Luci pré-installé. Nous utilisons le mode point d'accès AP.
Installation du package
php5 et de toutes les bibliothèques nécessaires pour former l'interface Web. Installation d'un package pour
MPU6050 à partir de
leon0516 . Au démarrage, j'ai placé les fichiers autorun du pilote MPU6050 et mon script écrit sur le
bash 6050.sh. Le pilote MPU6050 génère un fichier texte des lectures de l'accéléromètre /tmp/mpu6050.txt. 6050.sh analyse uniquement les modifications de l'axe Z dans le fichier /tmp/mpu6050.txt et écrit son journal dans /www/mess.log. Les pages de
configuration et d'affichage sont écrites en php.
Nous connectons le smartphone à FishSensor comme point d'accès. Installez sur le bureau à partir du navigateur en tant qu'application Web. Pour Android, dans les paramètres du navigateur, nous activons la lecture automatique des fichiers audio (dans iOs, une telle feinte est interdite par une politique de sécurité).
Face au problème de la mise en cache des données écrites dans un fichier texte par le système d'exploitation OpenWrt. Les lectures de l'accéléromètre sont écrites dans un fichier lorsque le cache mémoire est plein, parfois les retards atteignent jusqu'à 1 seconde. Un correctif existant pour désactiver la mise en cache des fichiers est rompu. J'ai pensé que pour ma tâche ce n'était pas très pertinent et j'ai décidé de laisser le problème jusqu'à des temps meilleurs.
Démo
Des tests grandeur nature n'ont pas encore été effectués, ils sont prévus ce mois-ci.
PS Le développement de l'idée peut être un tournevis sans fil avec un Vocore installé pour accrocher l'équipement au moment de la morsure. Dans le développement maximum, le service Yandex.Fishing.