
Ces dernières années, je voulais avoir un jouet sur le panneau de commande et toujours avec une vidéo. Mais n'achetez pas de ready-made, mais faites-le vous-même. Et au final je me suis commandé un tel jouet, avec un système de contrôle simple, mais un grand potentiel de modernisation. Il a fallu environ 9 mois pour terminer tous les travaux du début à la fin. Pendant la majeure partie de cette période, des composants chinois attendaient.
J'écris un article pour la plupart pour moi-même, afin qu'à l'avenir je n'oublie pas ce que j'ai fait, comment, pourquoi et pourquoi.
Il contiendra deux parties principales: le matériel et les logiciels, et éventuellement une autre partie sur la disposition du fer. Tout d'abord, je décrirai le matériel, à partir duquel j'ai collecté, quels problèmes j'ai rencontrés et comment je les ai résolus.
1. Matériel
Le système se compose d'un panneau de commande et d'équipements installés sur une machine à écrire. Examinons-les plus en détail.
1.1 Panneau de configuration
Composants
Chapeau de jeu
Le jeu HAT a été sélectionné car Il s'agit d'une solution clé en main combinant un écran, un joystick et un clavier suffisants pour contrôler la machine.

Le joystick sur cette carte est KY-023. Il a décidé d'utiliser à la place du volant. Mais il s'est avéré que la framboise n'a pas d'ADC et les seules valeurs qui pourraient en être obtenues sont 0 et 1, ce qui n'est clairement pas suffisant pour une rotation en douceur des roues.

ADS1115
Ce problème a été résolu par le module ADS1115.
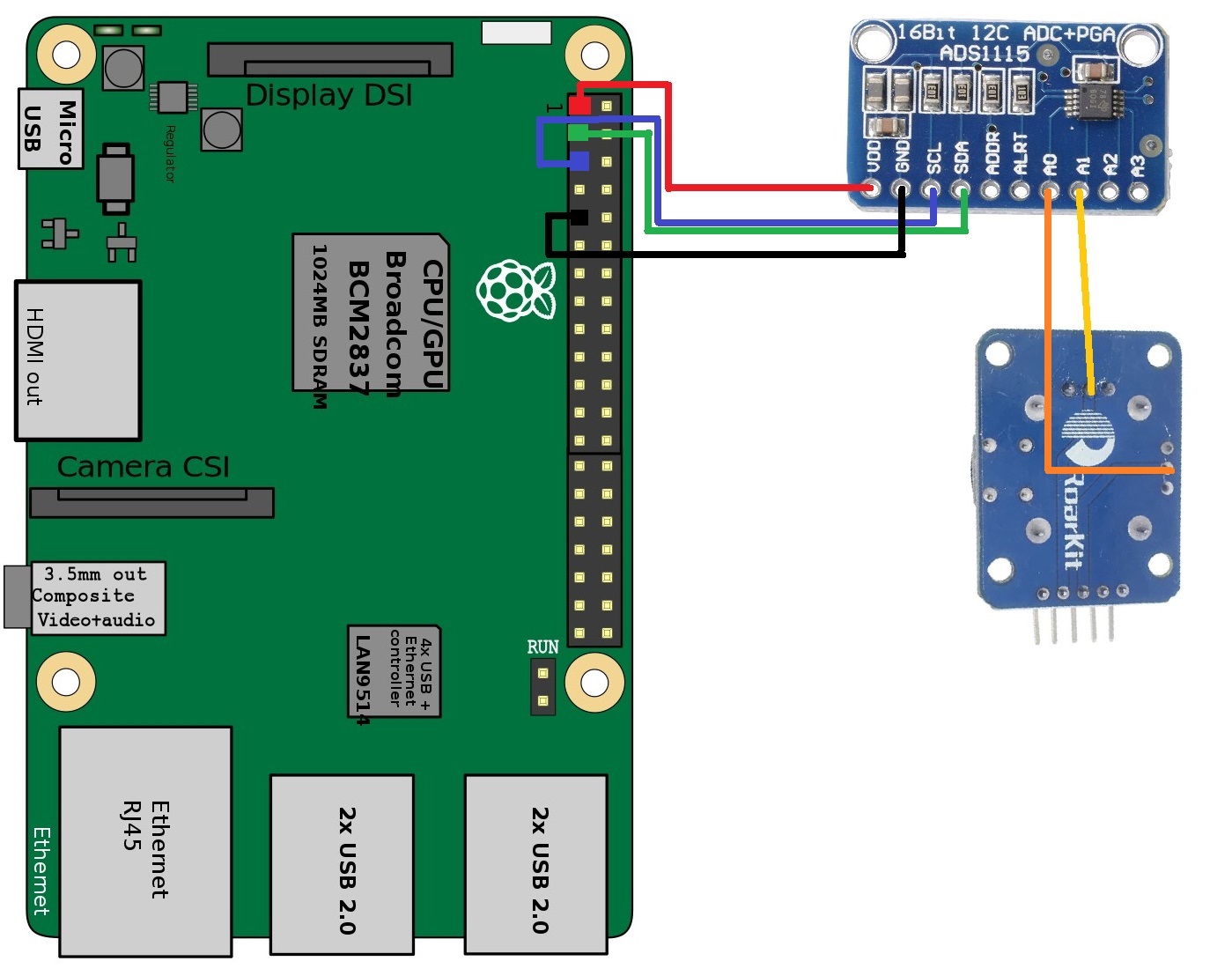
Le module a été soudé au Game HAT et attaché à celui-ci en utilisant du ruban adhésif 3M. Les lectures sont prises à partir des jambes du milieu des résistances variables sur le joystick. Cela ressemble à ceci:

Le joystick est également soudé dans le Game HAT. Les fils sont soudés aux connecteurs Game HAT, qui correspondent aux connecteurs d'alimentation et I2C du Raspberry. Schéma de câblage:
Ceci termine la collection matérielle du panneau de commande. Extérieurement, il n'a subi aucun changement visible.
1.2 Machine
Comment tout cela a l'air horrible sous le capot:
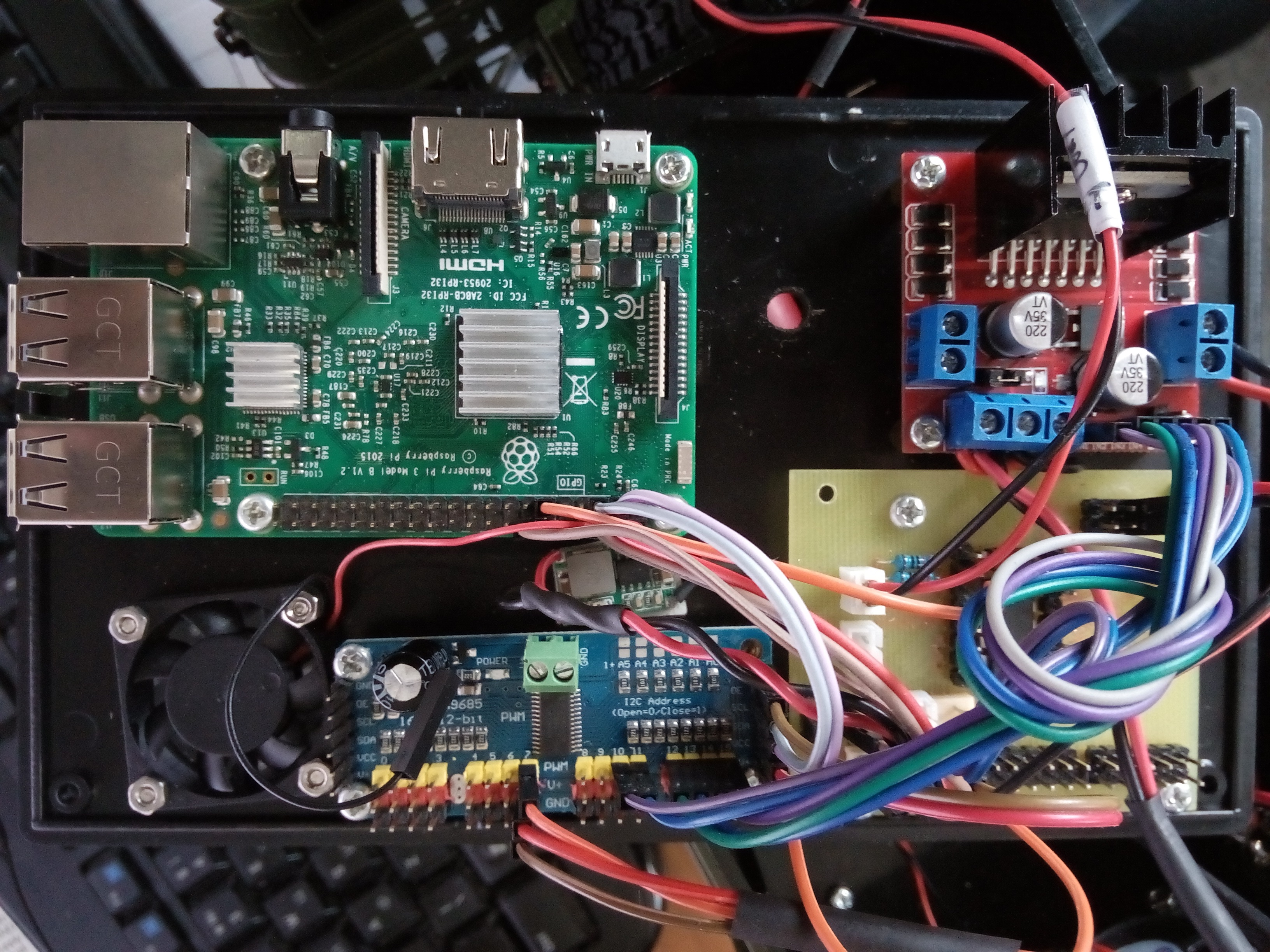
Faisons les choses correctement.
Composants
- Raspberry pi 3
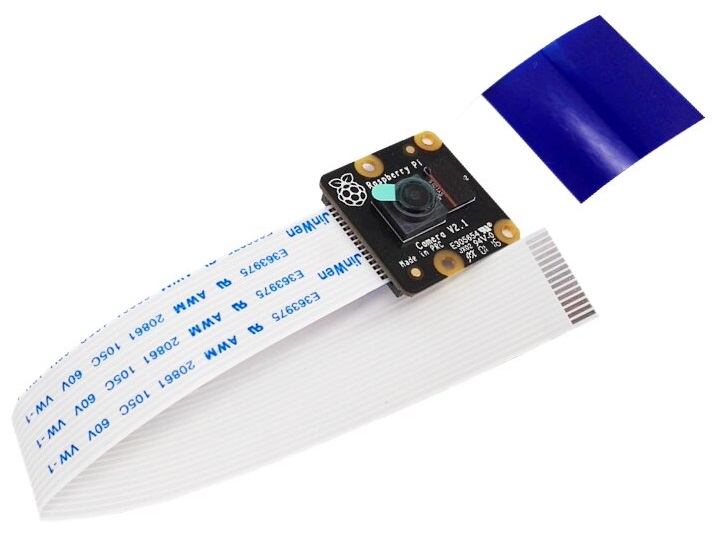
- Caméra Raspberry Pi v2 NoIR
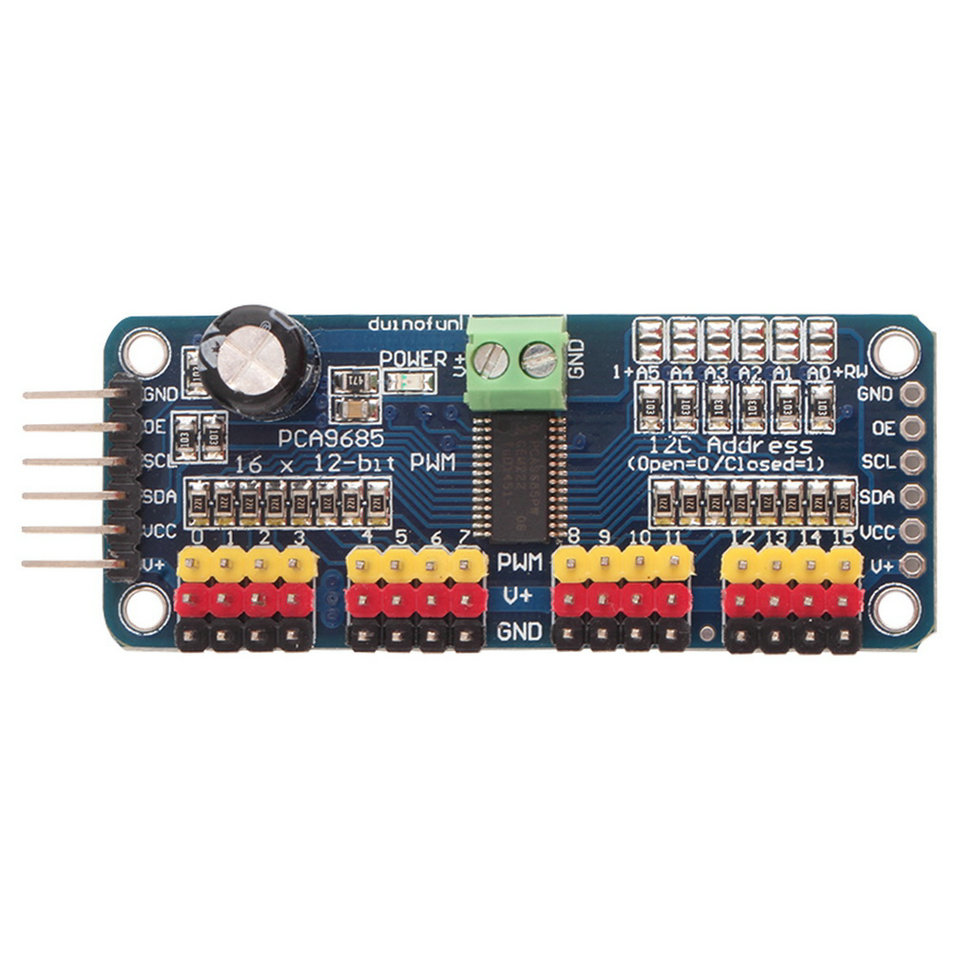
- Générateur PWM PCA9685
- Convertisseur de puissance abaisseur Mini-360
- Contrôleur de charge BMS CF-4S30A-A
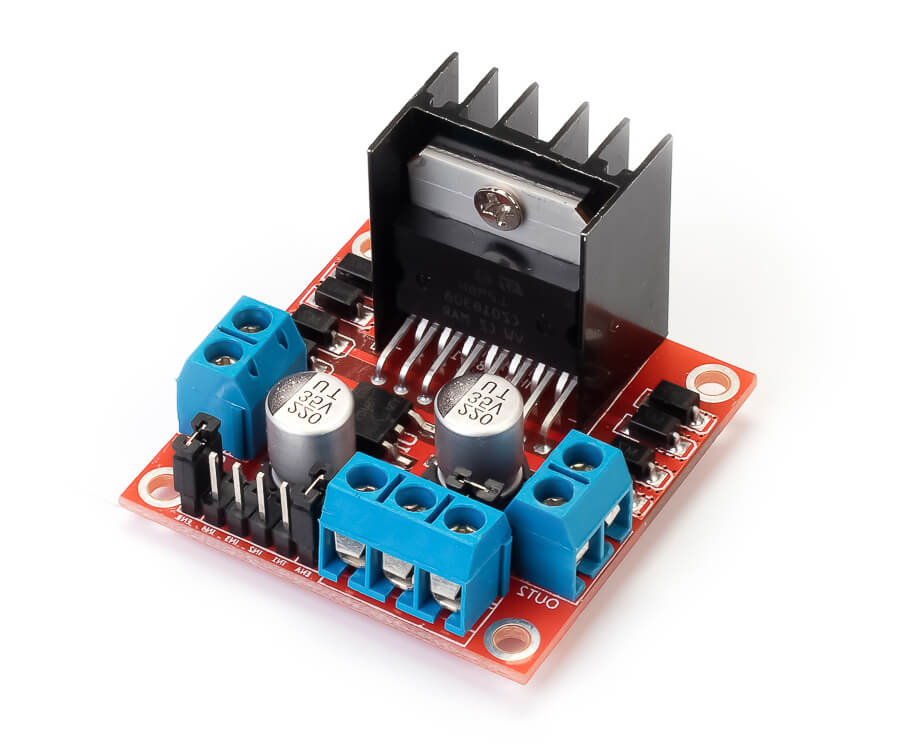
- Pilote de commande de moteur L298N
- Ma carte de contrôle d'éclairage basée sur le pilote L293
- 3 batteries lithium-ion 18650
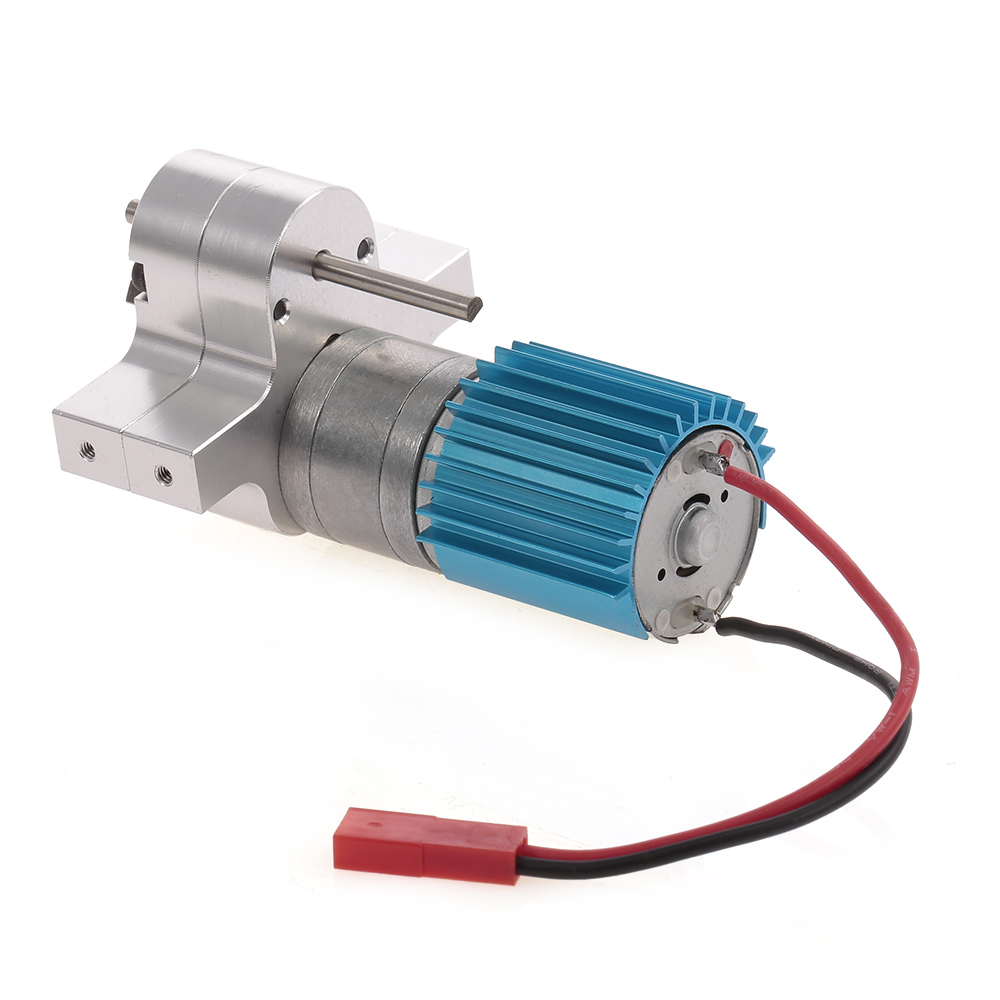
- 370 moteur
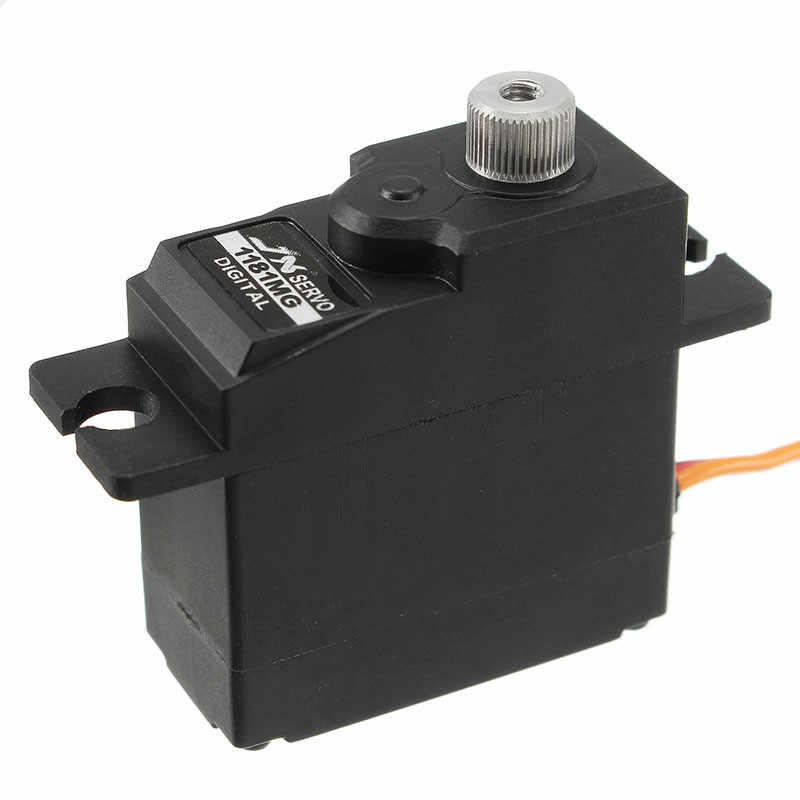
- Servo DI-1181MG
La nutrition
Commençons par l'alimentation, elle est fournie par trois accus 18650 connectés en série et fournissant ~ 12 volts.
Les batteries sont connectées via la carte BMS CF-4S30A-A afin qu'elles puissent être chargées et non déchargées à zéro sur le pokatushki.
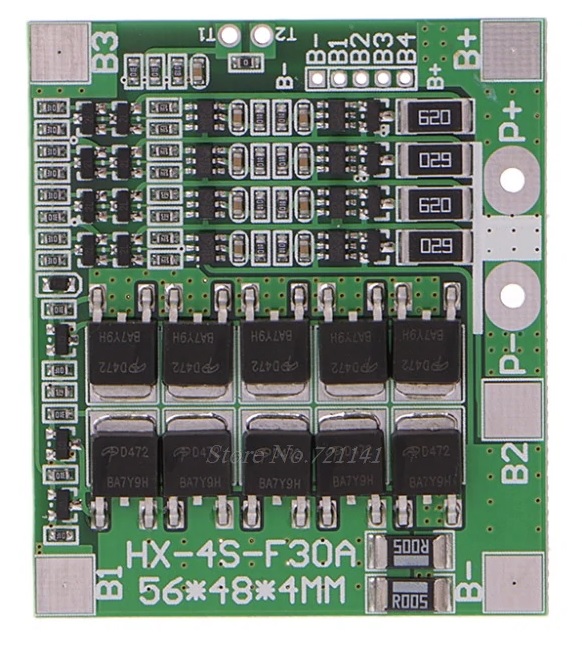
Mais cette carte est conçue pour 4 batteries, elle a donc été refaite pour fonctionner avec 3 batteries. Pourquoi l'a-t-elle prise, et non 3S 40A BMS. Parce qu'elle était à portée de main.
Schéma de modification:

Cette tension alimente le moteur 370 via le pilote L298N.
Pour alimenter le Raspberry, la tension des mêmes batteries est utilisée, mais la tension est réduite par le module Mini-360 à 5 volts.

Framboise propulsée directement sur ses pattes.
Mouvement
Parlons maintenant de la façon dont la voiture roule. Pour contrôler le mécanisme de direction, un servo-variateur DI-1181MG est utilisé, qui est contrôlé à l'aide du PCA9685. Le PCA9685 est également responsable du contrôle du moteur en ajustant sa vitesse et son sens de rotation via le pilote L298N. Raspberry contrôle également le PCA9685 sur le bus I2C. Le PCA9685 est alimenté par 5 volts avec un convertisseur abaisseur. C'est suffisant pour les servos et le contrôle moteur. Le moteur est connecté à deux sorties L298N pour augmenter la puissance.
Vidéo
Pour la vidéo, j'ai utilisé Camera v2 NoIR, il se connecte facilement à Raspberry. Mais il y a eu quelques améliorations. La boucle standard de la caméra était de 15 cm de long, ce qui n'était pas suffisant pour les travaux d'installation. Cette boucle est également non standard, elle possède 15 broches. Sur aliexpress, pour une longue boucle pour cet appareil photo, les Chinois veulent plus de 1000 roubles. Par conséquent, un ensemble de 10 boucles standard à 16 broches ~ pour 300 roubles a été acheté. Et à l'aide de la technologie de pointe pour l'utilisation des ciseaux de bureau, un câble à 15 broches pour la caméra a été refait.

Au moment de la rédaction, le 2ème mois, j'attends le support pour la caméra dans la cabine. Jusqu'à présent, la machine n'affiche que le plafond)
La lumière
La machine a déjà installé un éclairage régulier, composé de phares avec 2 LED jaunes. Il ne reste plus qu'à les alimenter.
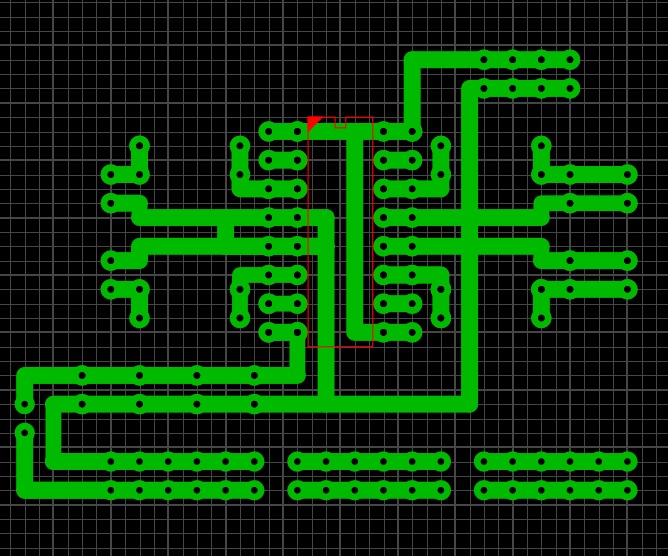
La lumière est contrôlée par ma carte, qui est basée sur le pilote L293. L'alimentation des diodes est fournie par une résistance. La carte est fabriquée à l'aide de la technologie LUT. Il a également un tas de pistes pour le câblage d'alimentation.
Il serait possible d'utiliser PCA9685 pour contrôler la lumière, au moment où je faisais le mien je ne connaissais pas PCA9685 et je pouvais m'en passer.
Circuit imprimé:
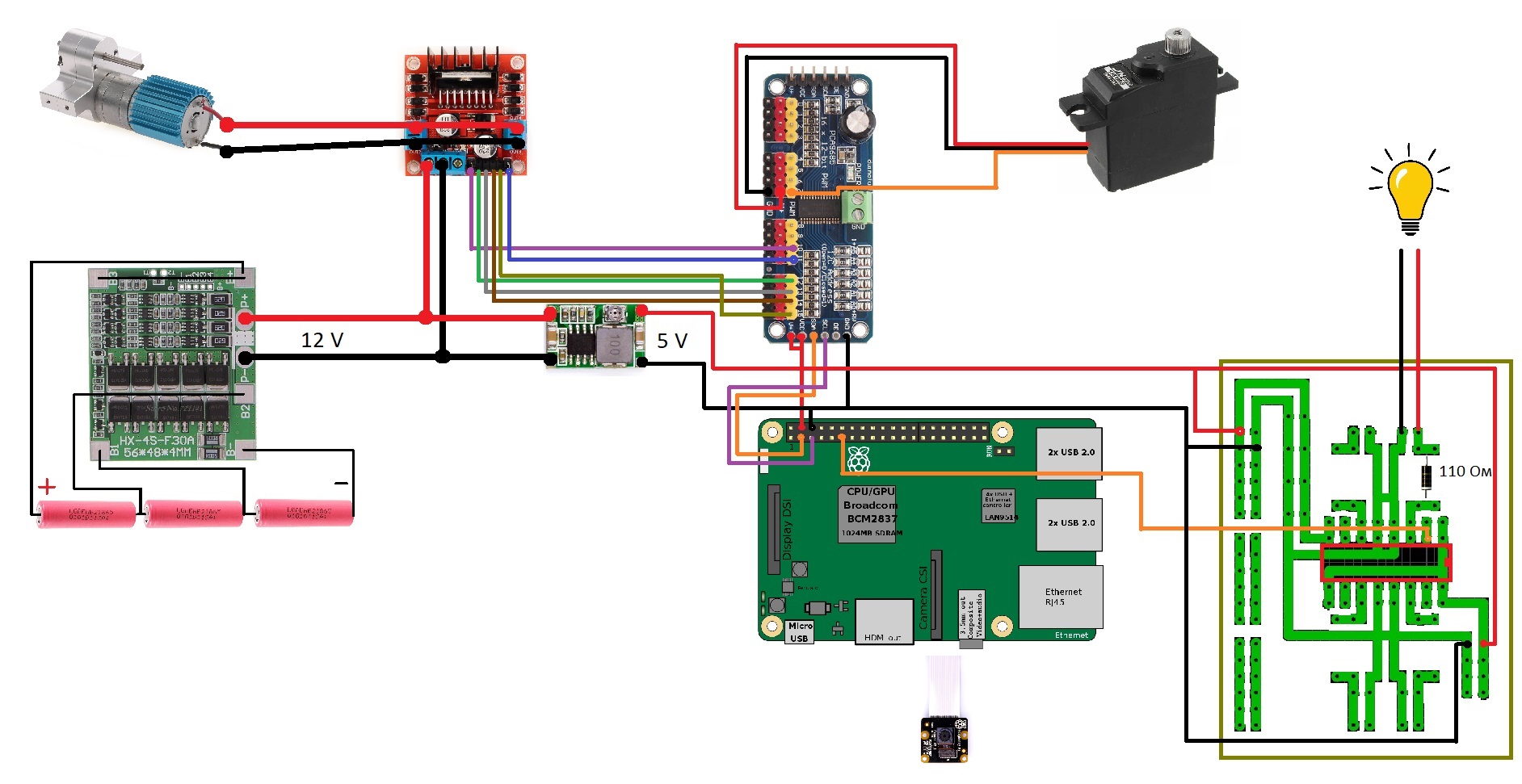
Je présenterai le schéma général de connexion:
Mais c'est ce qui se trouvait dans la machine à écrire jusqu'à ce que je grimpe))

Au moment d'écrire ces lignes, j'avais déjà commencé à oublier ce que je faisais et comment. Bien que pas plus d'un mois ne se soit écoulé depuis le montage.
Tout est en matériel. Dans mon prochain article, je vais décrire la partie logicielle de la façon dont le fer animé.
Gratitude
Mes collègues de travail: Andrei et Nikolai pour l'aide avec le fer, Anton et Eugene pour l'aide avec la vidéo. Samodelkin-22 pour LUT de ma planche. Et Murzik.
Les références
2e partie
3e partie