Pour rendre la capture robotique plus fiable, les chercheurs développent des objets aussi complexes que possible à manipuler.
 Inspirés par le concept d'images compétitives, des chercheurs de l'Université de Californie à Berkeley étudient des objets physiques compétitifs soigneusement conçus pour être difficiles à capturer avec des poignées robotiques standard
Inspirés par le concept d'images compétitives, des chercheurs de l'Université de Californie à Berkeley étudient des objets physiques compétitifs soigneusement conçus pour être difficiles à capturer avec des poignées robotiques standardRécemment, de nombreuses recherches sont apparues sur le thème des «images compétitives», qui sont des images d'objets modifiés de sorte qu'il est particulièrement difficile pour les algorithmes de vision par ordinateur de les reconnaître. L'idée est d'utiliser ces images pour développer des algorithmes de vision par ordinateur plus robustes, car leur nature "contradictoire" est une option "pire des cas" spécialement implémentée - et si votre algorithme peut traiter des images contradictoires, alors il traitera probablement la plupart d'autres tâches.
Des chercheurs du Laboratoire d'automatisation et d'ingénierie (
AUTOLAB ) de l'Université de Californie à Berkeley, dirigés par le professeur Ken Goldberg, ont étendu ce concept aux poignées robotiques. Ils ont spécifiquement conçu des objets de compétition physiques afin qu'ils soient difficiles à soulever avec des bras robotiques conventionnels. Il suffit de corriger légèrement les figures tridimensionnelles habituelles, et la poignée standard à deux doigts rencontrera toutes sortes de difficultés, en essayant de saisir correctement l'objet.
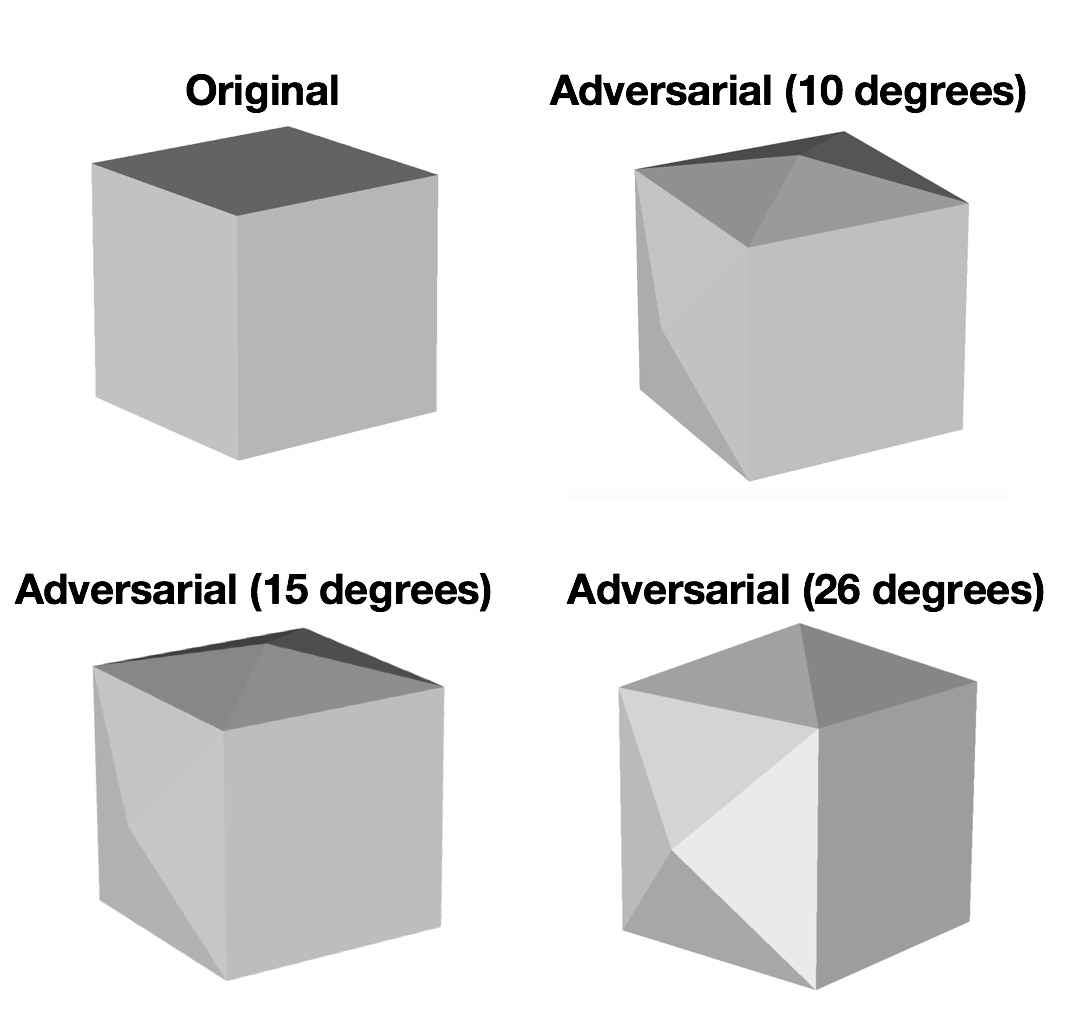 En commençant par un cube, un objet compétitif évolue, devenant de plus en plus difficile à capturer avec une pince à deux doigts - lorsqu'il essaie de serrer une surface angulaire, l'objet tourne et glisse.
En commençant par un cube, un objet compétitif évolue, devenant de plus en plus difficile à capturer avec une pince à deux doigts - lorsqu'il essaie de serrer une surface angulaire, l'objet tourne et glisse.La principale caractéristique de ces objets de compétition est qu'ils semblent faciles à saisir, mais avec au moins une pince à deux doigts, cela s'avère difficile. La différence entre l'apparence des objets et leur géométrie réelle est insignifiante: dans un exemple, il s'agit d'un cube avec des pyramides basses sur trois des six côtés - le plus petit d'entre eux a un angle d'inclinaison des bords de seulement 10 degrés. Et en face de chaque pyramide, il y a une face plate ordinaire, par conséquent, le cube n'a pas de faces plates opposées. Pour cette raison, les poignées à deux doigts travaillant sur la pince d'objets rencontrent des problèmes, car si vous essayez de serrer la surface à un angle, la force de compression fera tourner l'objet et il tombera souvent de la pince.
 La capture parallèle avec des contacts ponctuels capture avec succès un cube normal (à gauche) et ne peut pas faire face à un cube compétitif développé par des chercheurs (à droite)
La capture parallèle avec des contacts ponctuels capture avec succès un cube normal (à gauche) et ne peut pas faire face à un cube compétitif développé par des chercheurs (à droite)Les planificateurs de capture recherchent souvent des surfaces opposées lisses qui peuvent être serrées, et comme la différence entre un cube compétitif et un cube ordinaire est suffisamment petite pour qu'un capteur 3D manque, la plupart des systèmes robotiques penseront: «Oh, regardez, c'est un cube, c'est très facile ! " Et puis ils échoueront sûrement la tâche lorsque le cube sortira et glissera hors de leur emprise.
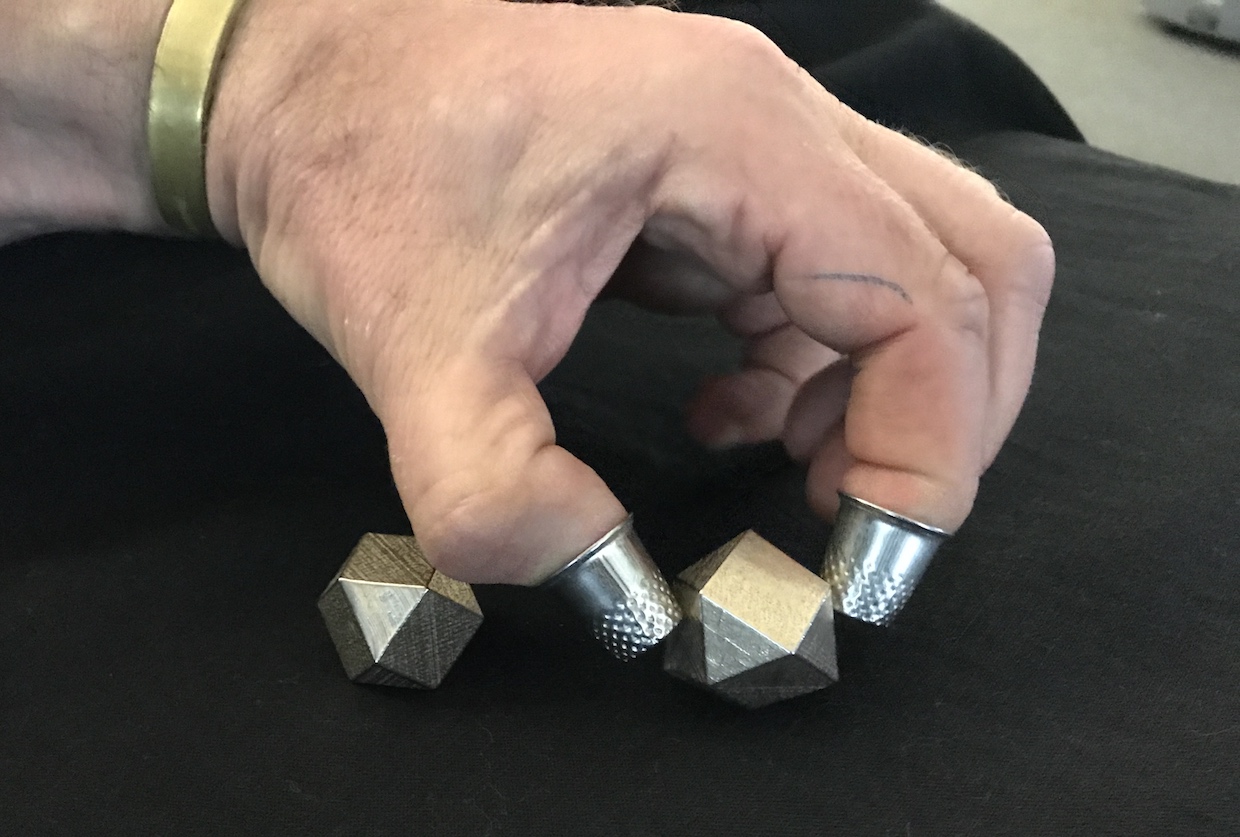 Les formes contradictoires fonctionnent également chez l'homme - portant des dés à coudre qui imitent l'acier froid et insensible du robot et utilisant deux doigts pour serrer l'objet, les chercheurs ont confirmé qu'il était difficile de soulever ces objets
Les formes contradictoires fonctionnent également chez l'homme - portant des dés à coudre qui imitent l'acier froid et insensible du robot et utilisant deux doigts pour serrer l'objet, les chercheurs ont confirmé qu'il était difficile de soulever ces objetsAvec la complexité croissante du formulaire, il devient de plus en plus difficile de développer une version compétitive. En prenant le cuboctaèdre (un polyèdre avec huit faces triangulaires et six faces carrées), les chercheurs ont modifié au hasard les sommets de la figure (dans la simulation) jusqu'à obtenir une forme qui n'a pas de faces directement opposées. Et pour des formes plus complexes, telles que des cylindres qui se croisent, des exemples compétitifs ont été obtenus en utilisant l'algorithme d'apprentissage en profondeur.
 Pour les formes plus complexes, telles que les cylindres qui se croisent, des exemples compétitifs ont été obtenus en utilisant des algorithmes d'apprentissage en profondeur
Pour les formes plus complexes, telles que les cylindres qui se croisent, des exemples compétitifs ont été obtenus en utilisant des algorithmes d'apprentissage en profondeurDans
des tests préliminaires dans le monde réel, la capture de points parallèles a tenté de soulever certains de ces objets controversés. Dans chaque cas, la probabilité estimée de capture de l'objet était de 100% (sur la base de la politique
Dex-Net testée dans la simulation), mais en fait, il s'est avéré que les captures réussies de cubes et cuboctaèdres compétitifs n'ont réussi que dans 13% des cas.
Les chercheurs disent qu'ils envisagent de tester ces objets avec différents types de poignées, ainsi qu'avec des poignées à vide, pour voir s'ils peuvent créer les objets les plus compétitifs de tous. Et rappelez-vous que le but de tout cela n'est pas seulement de tromper les algorithmes de capture malheureux, mais de développer des outils qui aideront à rendre la capture robotique suffisamment fiable (espérons-le) pour le monde réel.