
Tout peut être une inspiration pour les scientifiques. Et si nous parlons de représentants de la flore et de la faune, ils sont alors des leaders dans les listes de muses qui ont inspiré de grands esprits pour créer une grande variété d'appareils, de machines et de technologies entières. Aujourd'hui, nous allons faire connaissance avec une étude inspirée d'une créature, une «poignée de main» avec laquelle cela prendrait un certain temps - une pieuvre. Des scientifiques de l'Université de Caroline du Nord ont décidé de créer un appareil qui, comme les membres d'une pieuvre, peut traiter des informations et prendre des décisions au niveau matériel et sans ordinateur centralisé. En quoi consiste ce dispositif, quelles fonctions peut-il déjà remplir et quelles sont les perspectives d'une «logique tactile douce»? Nous en apprenons à travers le rapport du groupe de recherche. Allons-y.
Base d'étude
Le poulpe est le mollusque invertébré le plus averti de l'ordre des céphalopodes. Le corps mou de la pieuvre est équipé de huit tentacules, sur lesquels il y a des ventouses spéciales nécessaires pour la fixation à la surface, tenant la proie et l'étude tactile de l'environnement. De plus, il y a aussi des papilles gustatives sur les tentacules, qui permettent au poulpe de déterminer la comestibilité de ce qu'il touche (il serait probablement pratique de choisir des produits sur le marché).

Les tentacules de la pieuvre sont également uniques en ce que 2/3 de tous les neurones de son corps sont situés en eux, ce qui permet aux tentacules d'agir indépendamment, c'est-à-dire aucun signal du cerveau. C'est drôle que les "mains" de la pieuvre soient si autonomes que cela lui apporte quelques désagréments. Le fait est que notre héros à huit bras ne peut pas déterminer avec précision la position de ses membres par des sensations, mais seulement par l'observation directe de ses tentacules. Cela est dû au fait que le poulpe n'a pas de prédiction stéréo complète, c'est-à-dire la capacité de reconnaître des objets au toucher (leur forme, leur taille, etc.). Une pieuvre peut détecter des sections individuelles de la texture d'un objet, mais ne peut pas assembler ce puzzle en une seule image. En d'autres termes, il ne sait quels mouvements ont été faits par l'une ou l'autre main seulement s'il l'a vu de ses propres yeux. Bien sûr, cela cause parfois des inconvénients, mais si les poulpes pouvaient parler, ils se plaindraient à peine.
Les scientifiques de cette autonomie "manuelle" ont vu l'avenir et ont décidé de mettre en œuvre la caractéristique anatomique de la pieuvre en utilisant la technologie. Dans leur travail, ils décrivent un petit appareil assez simple (pour l'instant) fait de silicone et de chaînes de métal en fusion incorporé, appelé par les scientifiques «logique tactile douce» (
logique tactile douce ).
Les principaux matériaux de l'appareil sont un mélange de gallium à bas point de fusion (Ga, 75% de la masse totale) et d'indium (In, 25% de la masse totale), ainsi qu'un élastomère polydiméthylsiloxane (PDMS).
Le principe de base de ce prototype est le chauffage Joule, lorsque la chaleur est générée par le flux de courant électrique. En utilisant cet effet, qui est réalisé précisément par le métal liquide (point de fusion 15,7 ° C) à l'intérieur de l'élastomère, il est possible de réaliser un changement de couleur du prototype en raison de la réponse des pigments introduits.
Ainsi, il existe un dispositif souple et suffisamment élastique qui change de couleur en réponse à la pression ou à l'étirement. Par conséquent, ce processus se déroule sans la participation d'aucun centre de contrôle, mais directement dans le matériau du prototype.
Résultats de recherche
Les scientifiques notent que le changement de couleur a été choisi pour ce prototype pour une raison: premièrement, à ce stade de la mise en œuvre de la technologie, c'est un excellent moyen facile de démontrer les principes de base de l'appareil; deuxièmement, le changement de couleur est présent à la fois dans la nature et dans la technologie. Les représentants du monde animal de la planète Terre utilisent les changements de couleur pour se déguiser des prédateurs, pour démontrer leur toxicité, pour rechercher un partenaire et même pour montrer des émotions, ce qui est particulièrement courant pour les gens (plus rouge avec embarras, pâle avec peur, etc.). Dans le monde de la technologie, la couleur est également importante, car la modification de la couleur des pixels individuels, des grappes de pixels et de l'image entière sur le moniteur est une méthode d'interaction homme-machine.
Cependant, il existe une différence entre les animaux et la technologie. Les écrans utilisent souvent des «stratégies actives» basées sur la génération de lumière, et les animaux utilisent des «stratégies passives» lorsque la lumière externe est réfléchie sur la surface.
Selon les scientifiques, une stratégie passive pour changer la pigmentation peut être mise en œuvre de diverses manières: cristaux liquides thermochromiques, liquides colorés pompés à travers des microcanaux, interférence dans des films minces, cristaux photoniques dynamiques et structures plasmon, matériaux magnétiquement sensibles et molécules électrochromiques. Dans ce travail, des pigments thermochromiques ont été utilisés.
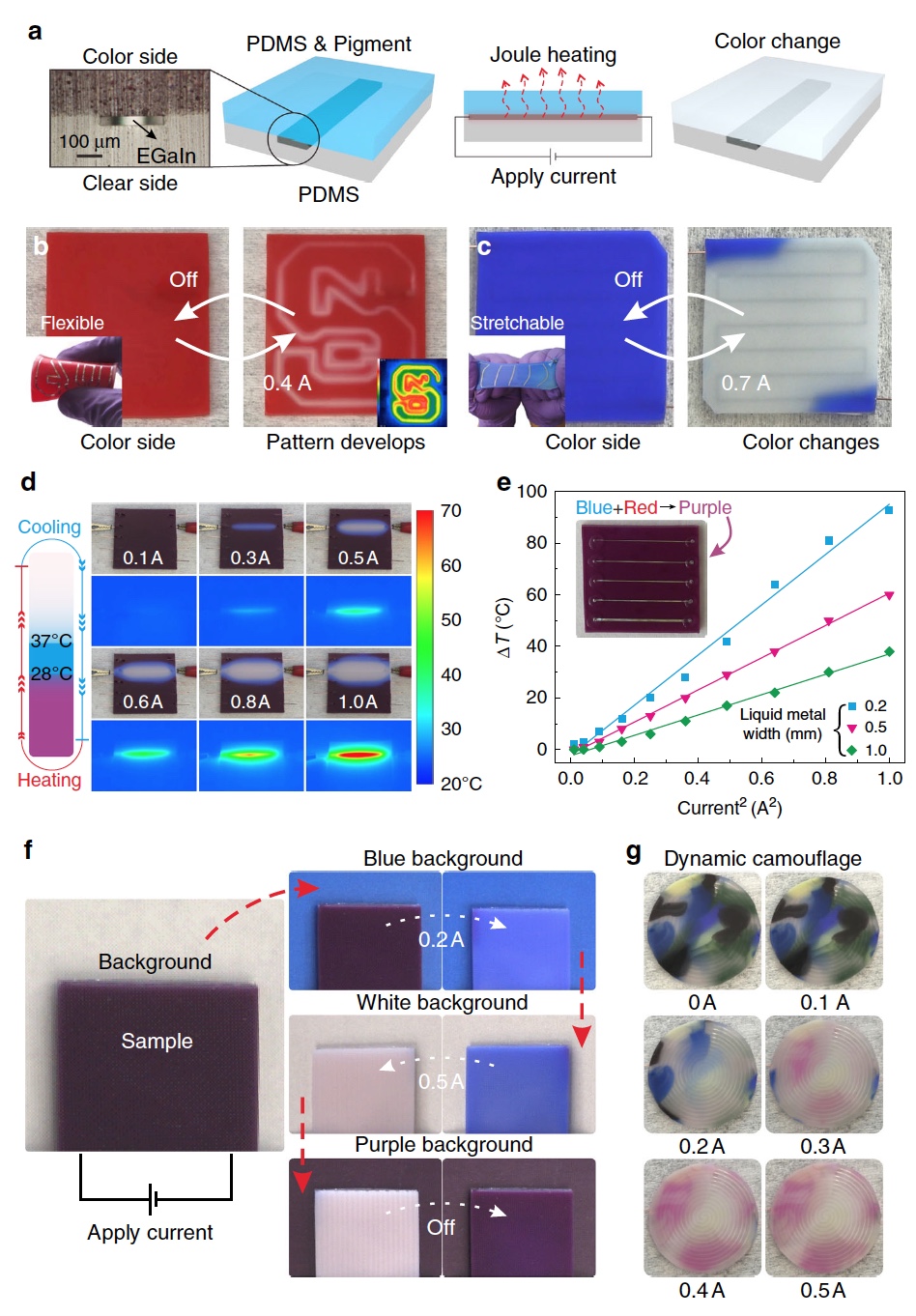 Image n ° 1
Image n ° 1La figure
1a montre la plate-forme de base du prototype: du métal liquide, situé entre deux couches de PDMS, dont l'une est transparente et l'autre contient des particules thermochromiques. Une couche transparente n'est pas nécessaire pour le fonctionnement des appareils, mais vous permet uniquement de considérer attentivement la dynamique du métal liquide dans le processus de recherche. Le courant traversant le métal liquide génère un échauffement Joule et les particules thermochromiques changent de couleur au-dessus des températures critiques en raison du réarrangement de la structure moléculaire.
Pour démontrer ce principe, la substance thermosensible TF-R1 est rose-rouge. Cette version de l'appareil montre immédiatement une couleur rouge, mais lorsque la température atteint 28 ° C et plus, la couleur devient blanche (vidéo ci-dessous).
Passez du rouge au blanc lorsque la température atteint 28 ° C.L'image IR (encadré en
1b ) montre des régions de température élevée correspondant à l'image visuelle observée des changements de couleur (
1b ).
Naturellement, un principe similaire peut être mis en œuvre avec n'importe quelle couleur. Par exemple, les scientifiques ont utilisé des thermochromes bleus et l'appareil a conservé une couleur bleue à température ambiante, ne devenant blanc qu'à 37 ° C et au-dessus (
1 s ).
La couleur bleue devient blanche lorsqu'elle est chauffée à 37 ° C et plus.Dans les zones où la couleur ne change pas, des fils de cuivre sont présents. Et comme la résistance spécifique du cuivre (1,68 × 10
−6 Ω · cm) est inférieure à la résistance spécifique du métal liquide (29,4 × 10
−6 Ω · cm), moins de chauffage Joule est généré, ce qui ne change pas de couleur en présence de cuivre.
Étant donné que différentes substances thermochromiques ont des températures de réponse (activation) différentes, leur mélange dans un seul appareil crée un nouveau système qui affiche trois couleurs (
1d ).
La dynamique de température à
1d montre également comment les couleurs changent de l'une à l'autre: magenta au bleu (T <28 ° C, car il n'y a pas de rouge), puis au blanc (T> 37 ° C, il n'y a pas de bleu et rouge). Dans un tel dispositif, la largeur du canal en métal liquide est de 0,4 mm.
Changement de couleur lorsque le courant change.Le processus lui-même est tout à fait compréhensible, mais il était encore nécessaire d'établir à quels indicateurs de puissance un changement de couleur se produit. À cette fin, les scientifiques ont suggéré que pendant le Joule, la puissance de chauffage (
P ) est générée en fonction du courant appliqué (
I ) et de la résistance du métal liquide (
R ) conformément à
P =
I 2 R.Comme la résistance est inversement proportionnelle à la largeur du canal, des expériences ont été menées dans lesquelles la géométrie du dispositif est toujours restée la même, mais la largeur des canaux a changé (insérer en
1e ). Comme on peut le voir sur le graphique
1e , la température est une fonction linéaire du carré du courant. Pour un courant donné, une diminution de la largeur du métal liquide augmente le changement de température dû à une augmentation du chauffage Joule. C'est-à-dire qu'une augmentation du courant augmente non seulement la température de surface maximale, mais augmente également la région connaissant des températures de surface élevées.
Des mesures ont été prises de la largeur de la région de changement de couleur de chaque dispositif pour établir une relation entre le courant et la largeur de la région de changement de couleur. Une augmentation de la densité de courant (due à une augmentation de courant ou à une diminution de la largeur du métal liquide) a provoqué l'expansion des zones de changement de couleur.
Changer la couleur de la pigmentation dans le règne animal est le plus souvent associé au camouflage, c'est-à-dire avec la capacité de se fondre visuellement avec l'environnement. Le dispositif sous enquête en est également capable.
La figure
1f montre le processus de modification de la couleur de l'appareil en fonction de l'arrière-plan. Cet effet est obtenu en ajustant le courant dans les canaux du métal liquide.
Changement de couleur adaptatif (camouflage).Vous pouvez également obtenir non seulement la couleur monochromatique de l'appareil, mais également différentes combinaisons de couleurs différentes (
1g ). Lorsque certaines couleurs commencent à s'estomper avec l'augmentation du courant, d'autres deviennent plus lumineuses.
Changement de couleur adaptatif au changement dynamique.Comme nous l'avons déjà compris, un rôle énorme dans le succès du prototype est joué par un type inhabituel de conducteur - le métal liquide, qui est capable de changer de forme, c'est-à-dire être élastique, ce qui permet d'obtenir des propriétés dynamiques d'échauffement Joule dues aux déformations. En d'autres termes, un tel système peut rendre compte thermochromiquement de l'état de l'appareil (pression, tension, etc.).
Les chercheurs comparent cet effet avec la mécanochimie en robotique douce, lorsque le changement de couleur correspond à un certain niveau de déformation, mettant en garde contre une éventuelle dégradation. Cependant, dans le cas d'un conducteur en métal liquide, aucune chimie n'est nécessaire et le nombre de sorties colorimétriques est beaucoup plus important. Étant donné que le changement de couleur, bien que dû à l'exposition thermique, est toujours activé mécaniquement, les scientifiques ont appelé ce processus thermomécanochromisme.
Comment tout cela fonctionne-t-il? Les chercheurs donnent un exemple simple - la tension du canal de métal liquide. Dans cette situation, la longueur du canal augmente, mais la surface en coupe diminue. Il en résulte une augmentation de la résistance et, par conséquent, une augmentation du chauffage Joule (
2a ).
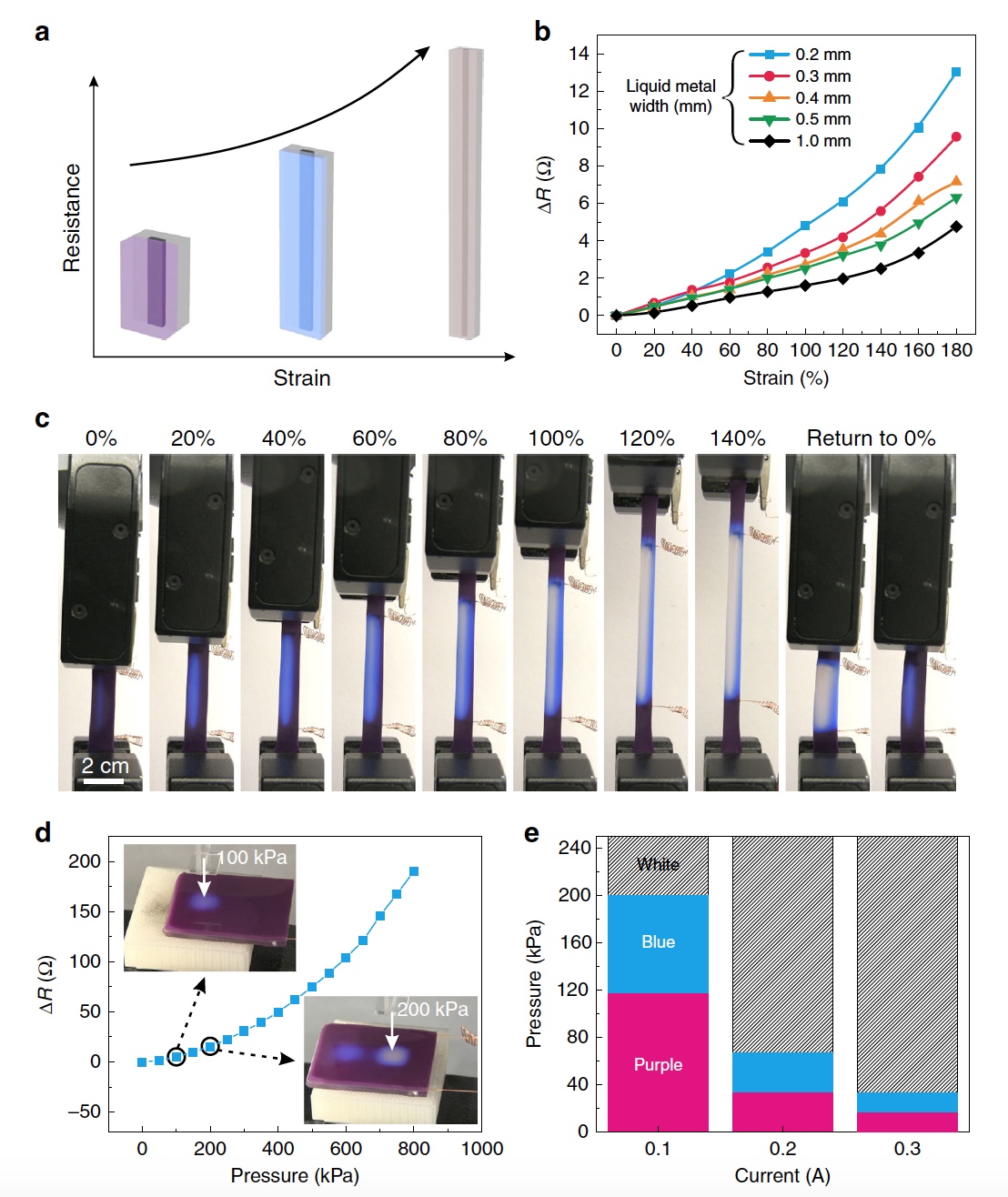 Image n ° 2
Image n ° 2La déformation (
ɛ = (
L -
L 0 )
L 0-1 , où
L est la longueur) conduit à une augmentation de la résistance initiale (R
0 ) selon la formule suivante:
R =
R 0 (
ɛ +1)
2 .
Compte tenu de cette base théorique, les chercheurs ont créé un capteur qui change de couleur en réponse à la tension. Comme prévu, la résistance du canal de métal liquide augmente avec l'allongement (
2b ). Au moment de l'étirement, un courant continu de 0,2 A a été appliqué (vidéo ci-dessous).
Démonstration de mécanochromie.À déformation nulle, ce courant n'est pas suffisant pour activer un changement de couleur, mais lorsque le canal est allongé (déformation réelle), le chauffage du joule commence à augmenter, conduisant à un changement de couleur.
L'image
2c montre des images de canaux métalliques liquides de 0,2 mm d'épaisseur à différentes tensions. L'appareil change de couleur du magenta au bleu en raison du manque de rouge (à des températures> 28 ° C) et passe en outre du bleu au blanc à 60% de déformation en raison de l'activation des composants thermochromiques bleus. Ensuite, l'appareil redevient violet lorsqu'il revient à 0% de déformation en raison du thermochromisme réversible.
Un effet similaire peut être utilisé pour déterminer le degré de déformation et sa localisation en évaluant la couleur et la zone des changements de couleur sur l'appareil.
Afin de comprendre comment la couleur change sous tension et, par conséquent, pour pouvoir ajuster la réaction de la couleur à la déformation, les scientifiques ont combiné deux formules importantes pour ce travail (
P =
I 2 R et
R =
R 0 (
ɛ +1)
2 ) et ont obtenu ce qui suit :
dP /
d (
ɛ +1) = 2
I 2 R 0 (
ɛ +1).
Cette formule montre que le changement de puissance (
P ) avec déformation (
ɛ ) dépend du courant (
I , dans ces expériences il est constant) et de la résistance initiale (
R 0 ). Il s'avère que le canal avec une résistance initiale plus élevée sera plus sensible à l'étirement. Pour confirmer cette théorie, les chercheurs ont créé un conducteur linéaire d'une longueur de 35 mm, d'une hauteur de 0,05 mm et d'une largeur de X mm (où X était de 0,2, 0,3, 0,4, 0,5 et 1,0 mm), après quoi ils ont mesuré la largeur de la région de changement de couleur lors de l'application d'un courant continu.
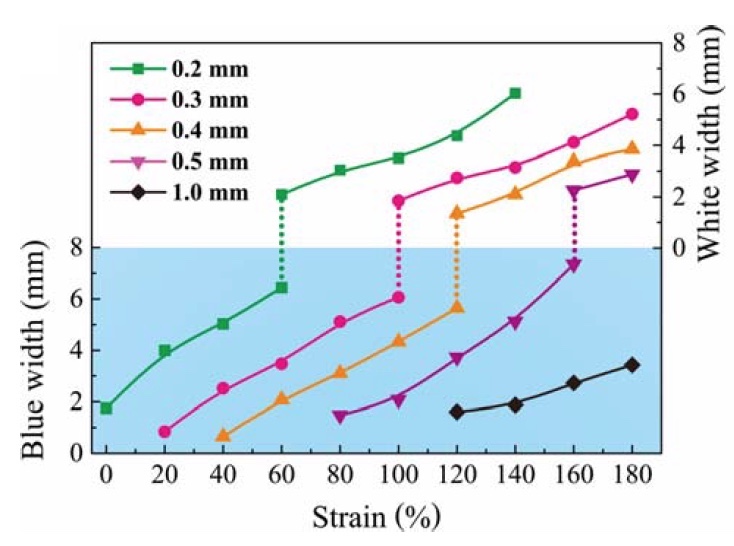 Graphique des résultats d'une expérience avec différentes résistances.
Graphique des résultats d'une expérience avec différentes résistances.À la suite de l'expérience, il a été constaté que les dispositifs avec un canal de métal liquide plus étroit changent de couleur à une résistance plus faible. Inversement, le dispositif le plus large ne devient jamais blanc même à 180% de déformation en raison de sa faible résistance initiale. Et cela suggère que vous pouvez configurer l'appareil en ajustant la résistance initiale afin que le changement de couleur se produise à une certaine valeur de tension.
En plus de la résistance, un autre facteur important de changement de couleur est le courant. Pendant l'expérience, un courant de 0,2, 0,3 et 0,4 A a été appliqué à un appareil avec un canal de 1 mm de large.
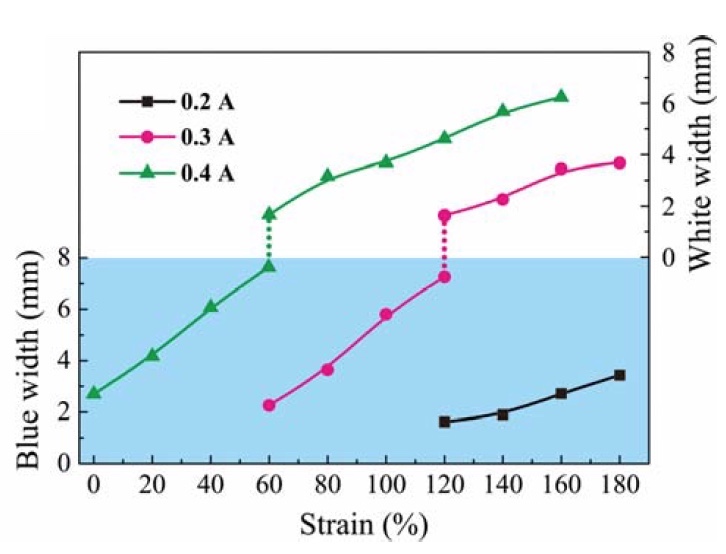 Graphique des résultats d'une expérience avec différents courants.
Graphique des résultats d'une expérience avec différents courants.L'appareil ne change pas de couleur en blanc lorsqu'il est allongé en utilisant 0,2 A. Après avoir augmenté le courant à 0,4 A, l'appareil peut changer de couleur à faible déformation (≈50%). Cette observation confirme que le courant peut être utilisé pour contrôler la déformation dans les lieux de changement de couleur.
En plus de l'étirement, il existe un certain nombre d'autres types de déformation, dont la compression. Une pression sur l'appareil entraîne également une modification de la taille des canaux en métal liquide. Un changement dans la zone transversale du canal à ce moment peut provoquer des changements de couleur locaux par des changements locaux de résistance (si le courant est constant, bien sûr).
Pour vérifier cela, une expérience a été menée dans laquelle un courant de 0,1 A a été appliqué à l'appareil et une pression de 100, 200, 300 et 400 kPa a été appliquée (l'intervalle de temps entre les pressions était de 15 secondes) sur une zone de 1x1 cm. Comme prévu, la couleur a changé exactement au lieu d'application de la pression.
La couleur bleue initiale est devenue violette à une pression de 100 kPa, puis la couleur blanche est apparue à 200 kPa (vidéo ci-dessous).
Démonstration de la réponse de l'appareil à la pression.Ensuite, les scientifiques ont décidé de démontrer comment le courant et la largeur du canal de métal liquide affectent le changement de couleur pendant la compression. Pour cela, un canal en métal liquide a été réalisé avec une longueur de 50 mm, une hauteur de 0,05 mm et une largeur de X mm (où X = 0,2, 0,3, 0,4, 0,5 et 1,0 mm). Un courant de 0,1, 0,2 et 0,3 A a été appliqué au dispositif avec un canal de 1 mm de large, après quoi le changement de couleur a été mesuré en fonction de la pression (
2e ). Les gammes de valeurs de pression dans lesquelles il y a des couleurs violettes et bleues augmentent avec l'augmentation du courant.
Les chercheurs notent que les appareils montrés sur
2d et
2e n'ont qu'un seul canal conducteur. Ainsi, cliquer dessus entraîne un changement local de résistance et une augmentation de la densité de courant, car le courant doit traverser la région compressée. Mais vous pouvez créer des systèmes avec plusieurs canaux pour le passage du courant. Ce concept peut être utilisé pour redistribuer l'énergie dans un circuit et effectuer des opérations logiques simples sans utiliser de semi-conducteurs.
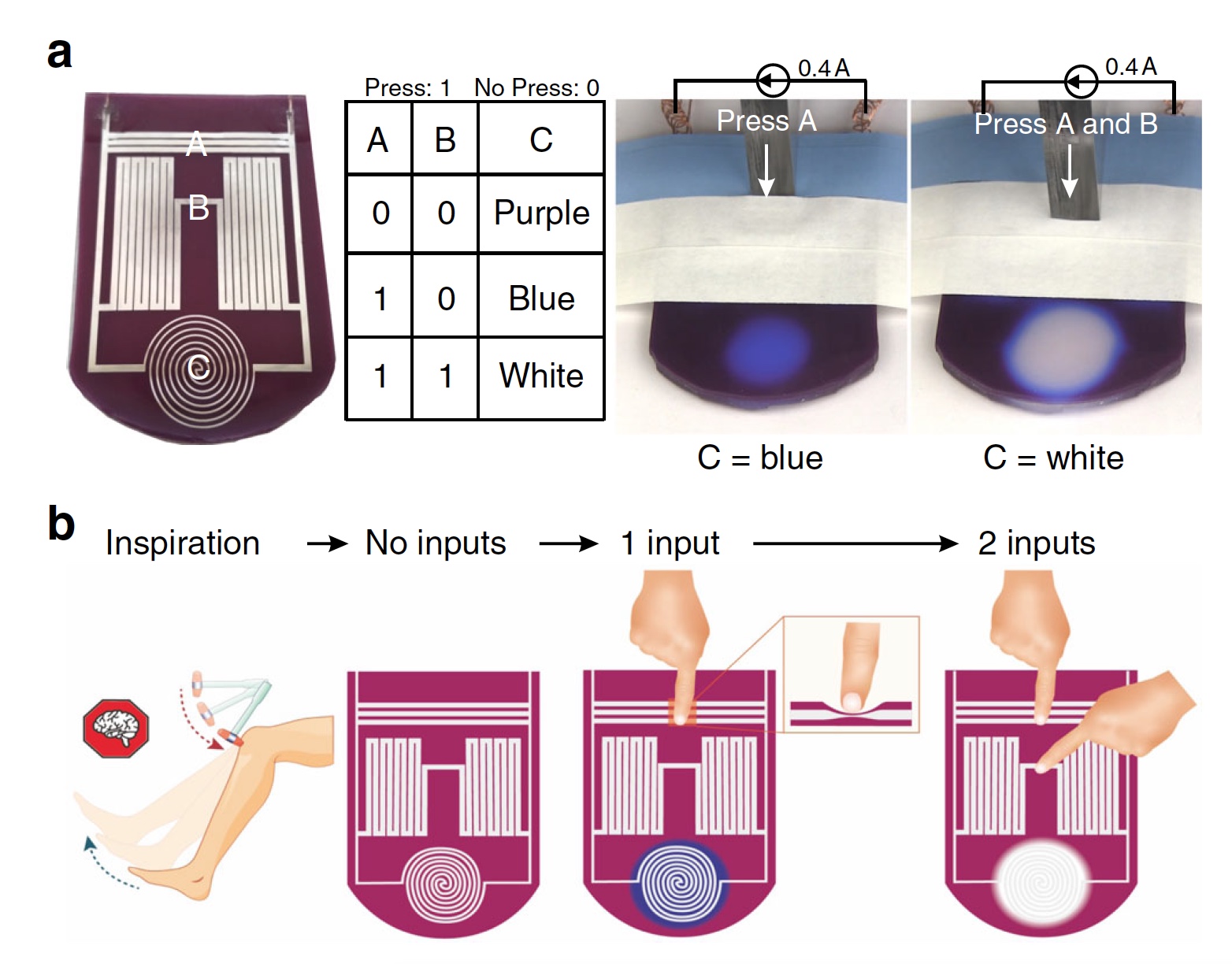 Image n ° 3
Image n ° 3Pour démontrer ce concept, un prototype (
3a ) a été réalisé, composé de deux zones «d'entrée» (
A et
B dans l'image) et d'une zone «d'affichage» (
C dans l'image).
Le signal d'entrée dans ce cas est la pression. Comme la tension de seuil dans un transistor, il existe une pression de seuil nécessaire pour induire suffisamment de courant pour provoquer un changement de couleur dans la "zone d'affichage". Suivant le langage de la logique binaire, les valeurs de pression au-dessus du seuil sont appelées "1" et les valeurs ci-dessous sont appelées "0".
Un courant de 0,4 A a été appliqué à l'appareil et divers signaux de pression «1» et «0» ont été appliqués dans les zones A et B. En réponse aux signaux, la zone d'affichage a réagi avec un changement de couleur (
3b ).
"Logique tactile douce."Ces changements de couleur se produisent en raison de la redirection du courant électrique vers la région C en fonction de l'entrée physique. Ce périphérique simple est une opération logique de type NAND, bien que la sortie soit compliquée par trois états de sortie plutôt que deux.
Appareil avec 10 canaux parallèles.Ce concept peut être étendu en créant des canaux parallèles à l'intérieur de l'appareil, qui redistribueront le courant lorsqu'il sera enfoncé.
L'utilisation de la "logique tactile douce" dans les appareils électroniques.En plus du chauffage Joule, le courant redistribué peut activer certains éléments du circuit (LED dans la vidéo ci-dessus) ou des éléments mécaniques (ventilateur dans la vidéo ci-dessous).
L'utilisation de la "logique tactile douce" dans les dispositifs mécaniques.Pour une connaissance plus détaillée des nuances de l'étude, je vous recommande de consulter le
rapport des scientifiques et
les documents supplémentaires qui s'y rapportent.
Épilogue
Dans cette étude, les scientifiques ont démontré des prototypes de dispositifs constitués d'un élastomère avec un ou plusieurs canaux conducteurs de métal liquide. L'utilisation de tels canaux a permis de maintenir l'élasticité de l'appareil lui-même. Le concept de changer la couleur de l'appareil en raison des cristaux liquides thermochromiques a été démontré, ce qui répond à un changement d'un certain indicateur (ou d'un coup): la largeur du canal conducteur, le degré de déformation, le courant et la résistance.
Cet appareil est d'une simplicité absurde et peut remplir certaines fonctions sans la participation du processeur central, c'est-à-dire au niveau du matériau lui-même. Cependant, il ne s'agit que d'un prototype, qui peut être encore amélioré et compliqué en ajoutant des canaux et / ou des éléments thermochromiques supplémentaires pour étendre sa gamme de capacités et de fonctionnalités. Le changement de couleur n'est pas la seule chose qu'un appareil basé sur la technologie décrite ci-dessus puisse faire. Les élastomères équipés de canaux en métal liquide peuvent changer de taille, de position, de forme, etc. Une telle technologie peut trouver son application dans des domaines tels que la robotique douce et les prothèses.
La décentralisation de la prise de décision pour la pieuvre n'est pas une nouveauté, mais pour les machines artificielles - jusqu'à présent, ce n'est que l'avenir. Dans quelle mesure cet avenir lointain dépend du succès de telles études.
Vendredi hors-dessus:
Expériences pratiques avec un bras robotisé «doux» (j'espère que le crabe n'a pas eu très peur).
Merci de rester avec nous. Aimez-vous nos articles? Vous voulez voir des matériaux plus intéressants? Soutenez-nous en passant une commande ou en le recommandant à vos amis, une
réduction de 30% pour les utilisateurs Habr sur un analogue unique de serveurs d'entrée de gamme que nous avons inventés pour vous: Toute la vérité sur VPS (KVM) E5-2650 v4 (6 cœurs) 10 Go DDR4 240 Go SSD 1 Gbit / s 20 $ ou comment diviser le serveur? (les options sont disponibles avec RAID1 et RAID10, jusqu'à 24 cœurs et jusqu'à 40 Go de DDR4).
Dell R730xd 2 fois moins cher? Nous avons seulement
2 x Intel TetraDeca-Core Xeon 2x E5-2697v3 2.6GHz 14C 64GB DDR4 4x960GB SSD 1Gbps 100 TV à partir de 199 $ aux Pays-Bas! Dell R420 - 2x E5-2430 2.2Ghz 6C 128GB DDR3 2x960GB SSD 1Gbps 100TB - à partir de 99 $! En savoir plus sur la
façon de construire une infrastructure classe utilisant des serveurs Dell R730xd E5-2650 v4 coûtant 9 000 euros pour un sou?