Bon après-midi Comme vous le savez, les routes en Russie sont loin d'être les meilleures et, par conséquent, le développement et la programmation de blocs de suspension actifs pour les voitures qui s'adaptent au type de revêtement routier en choisissant un mode de fonctionnement ou un algorithme sont toujours d'actualité.
Je vais donner un certain nombre de schémas électriques et de recommandations.
Vous devez d'abord décider du type de microprocesseur - un microcontrôleur. Je vous conseille de choisir un microcontrôleur STM rapide rapide 32 bits ou similaire - la meilleure option d'Infineon.

L'un des facteurs les plus importants et la clé de la fiabilité du circuit est la conception correcte de la source d'alimentation et du faisceau. Je recommande d'utiliser des contrôleurs LDO multicanaux basés sur microprocesseur avec un bus SPI série pour contrôler les modes d'alimentation, l'arrêt d'urgence et la surveillance (Power good).

Ensuite, nous procédons au développement de la «centrale». Nous concevons un schéma de contrôle pour les éléments élastiques - amortisseurs:
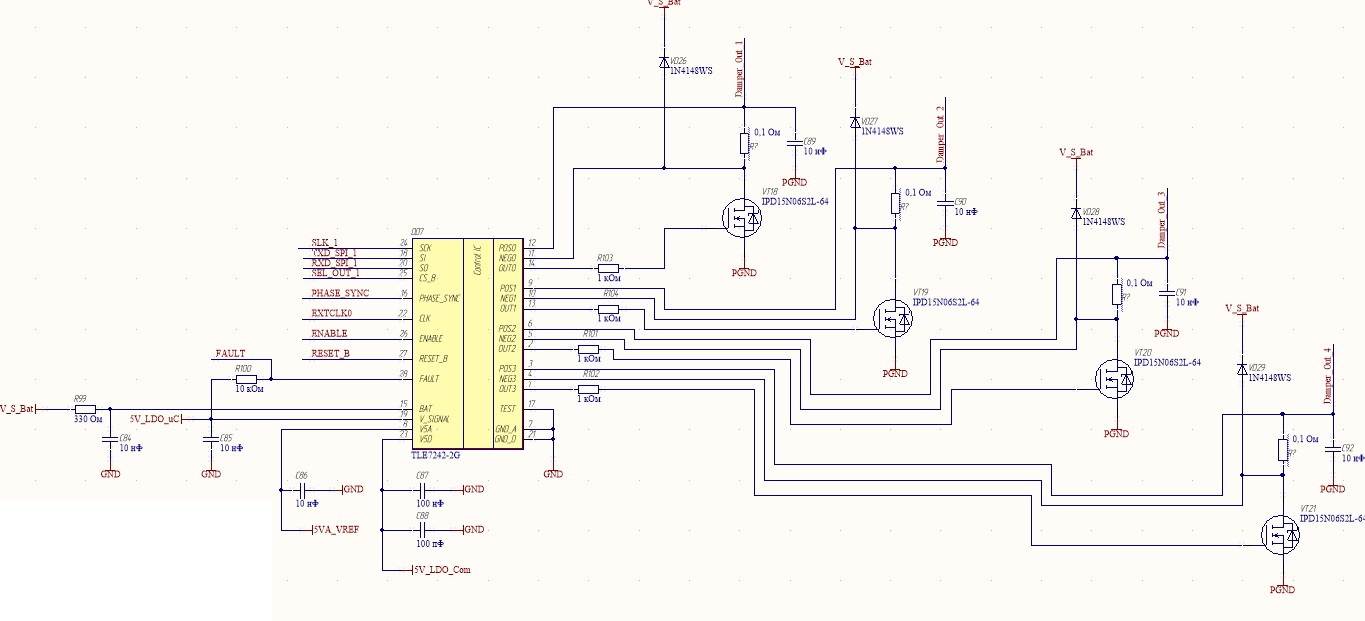
Il est préférable de choisir des puces spécialisées certifiées pour l'industrie automobile, par exemple TLE7242 Infineon. Il contient les circuits de commande MOSFET pour surcharger les circuits de sortie Drain-Source.
Pour les vannes de commande de pompe à air, les clés intelligentes doivent être utilisées avec une protection intégrée contre l'augmentation de température, les courts-circuits de charge et les surtensions:
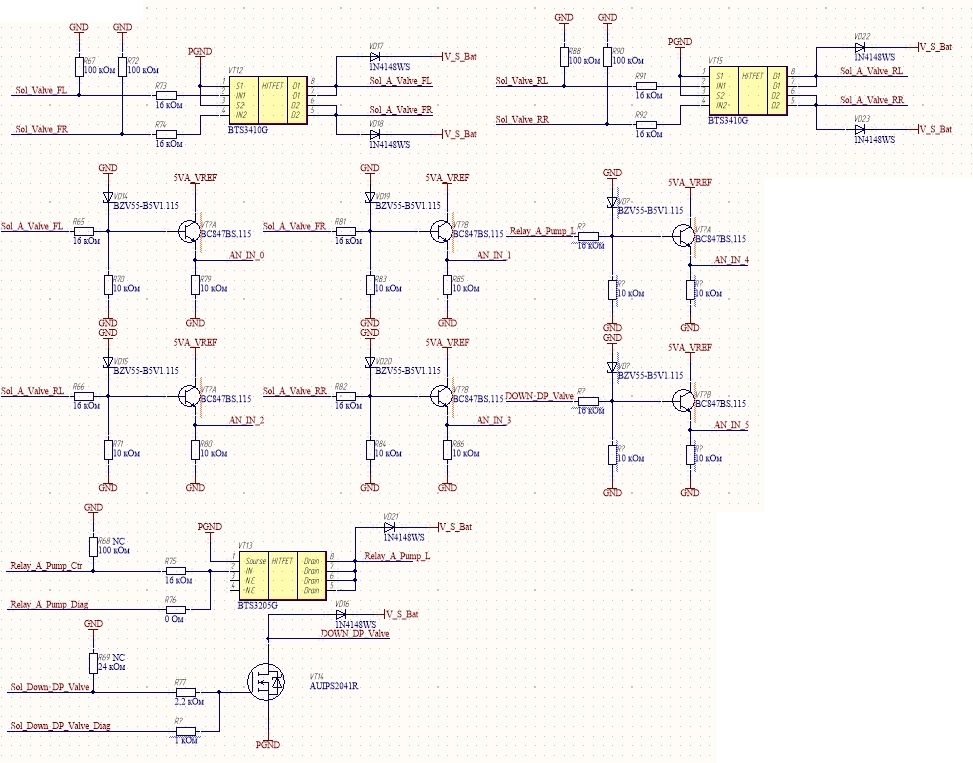
et vannes de pompe à air Air_Valve_Pump:

Après la conception de la «power unit», nous procédons au développement de circuits électriques pour la connexion de capteurs d'accélération. Nous choisissons le protocole pour la transmission de données série via l'interface I2C en raison de la simplicité comparative de la programmation, d'une ligne à deux fils et d'une faible fréquence de transmission d'informations. Assurez-vous de vous protéger contre la tension d'entrée du réseau + 12V et l'inversion de polarité en le tirant sur les circuits d'alimentation + 5V, + 12V et à diode TVS. J'ai utilisé des multiplexeurs Analog Devices pour la commutation séquentielle des canaux:

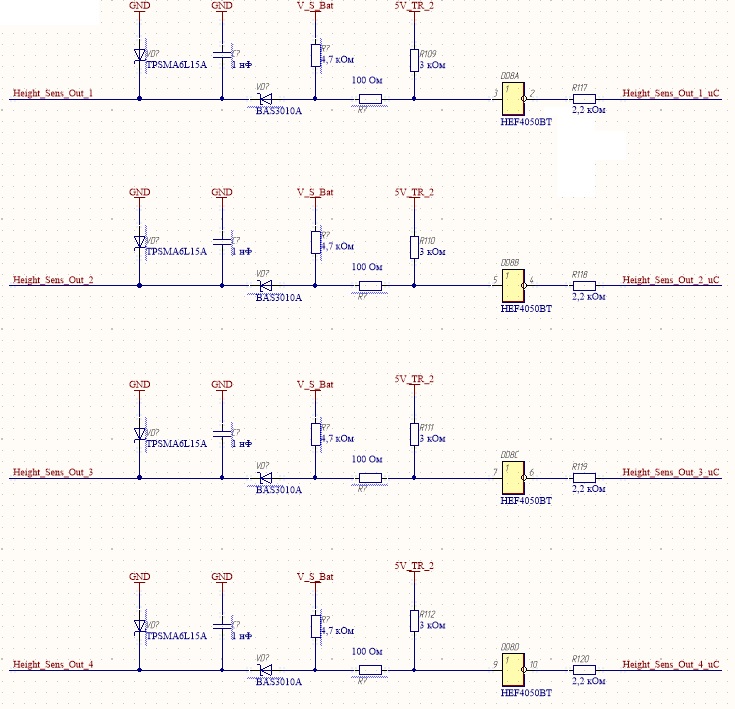
Le schéma de connexion des capteurs de hauteur est assez simple, le microcontrôleur lit les informations sur les broches d'E / S sur le front montant:
Pour configurer et calibrer l'unité, deux émetteurs-récepteurs CAN indépendants sont utilisés, fabriqués sur des puces TLE6250 avec protection ESD intégrée. Pour protéger la ligne de transmission différentielle, j'ai également installé des suppresseurs PESD2CAN.
Quelques mots sur la programmation par blocs. Le code source est écrit en C pour la communication entre les nœuds de bas niveau et les protocoles de communication: SPI, I2C, CAN. Pour contrôler le bloc à partir du niveau supérieur, les variables principales sont traduites par le programme MatLab & Simulink via le compilateur C et les fonctions intégrées du package mathématique.