Lors de la discussion de l'article précédent sur
la conception orientée modèle, une question raisonnable s'est posée: si nous utilisons les données de l'expérience, mais est-il possible de faire encore plus facilement, de mettre les données dans l'identification du système et d'obtenir le modèle de l'objet sans se soucier du tout de la physique? Sans étudier toutes sortes de formules à plusieurs étages de Navier-Stokes, Bernoulli et autres compas à compas avec Rabinovichi? Nous avons testé l'objet - obtenu le résultat.
Nous avons présenté le modèle de missile FAU2 comme une fonction de transfert unique,
vous pouvez le voir ici ... Et, semble-t-il, tout a fonctionné. Pourquoi devons-nous d'abord étudier l'analyse mathématique et le calcul différentiel alors qu'il y a un bouton magique qui obtient le modèle des tests?
En effet, cette approche peut être appliquée, mais cela nécessite deux conditions:
- L'objet doit déjà l'être (ne convient pas aux objets conçus).
- Les données de mesure doivent être complètes et fiables.
Dans tous les autres cas - «ils voulaient le meilleur, il s'est avéré comme toujours» (c).
Par exemple, dans
cet article sur la simulation d'un entraînement électrique, il est montré que «avec une certaine valeur seuil de la précision des instruments de mesure, le modèle d'entraînement devient non identifiable, ce qui entraîne une perte de contrôlabilité et une incapacité à diagnostiquer»
Dans le même article, nous analyserons la magie et la magie de la création de modèles sous forme de fonctions de transfert à partir de TAU, puis nous réaliserons une session d'exposition de cette magie.
Alors d'abord la magie
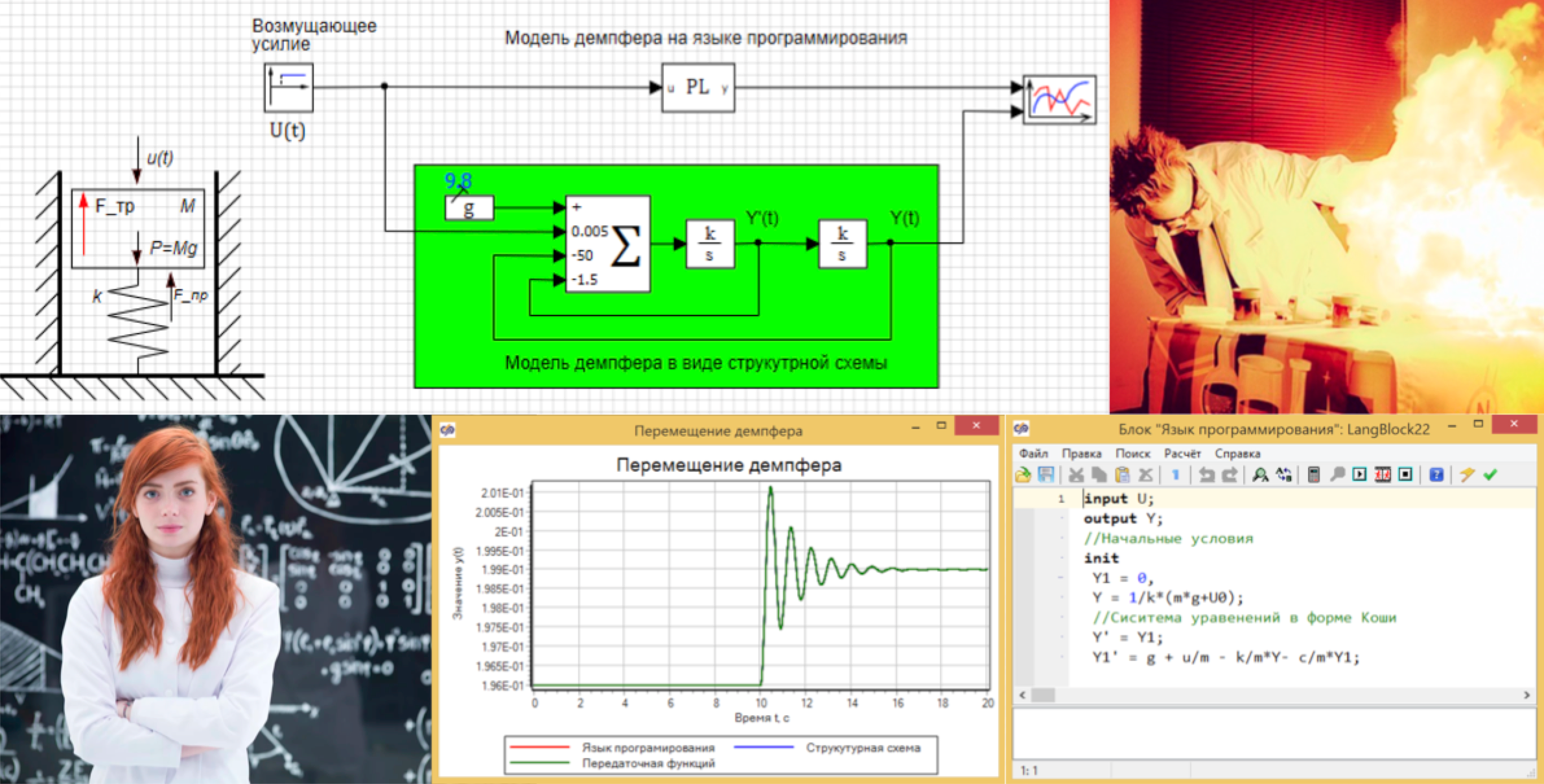
Jetons un coup d'œil à un exemple simple. Nous avons un modèle d'amortisseur mécanique. Il s'agit d'un piston sur ressort, il se déplace à l'intérieur du cylindre, il peut monter et descendre. Sa position est la fonction Y (t) qui nous intéresse, la force perturbatrice (U (t)) agit sur elle d'en haut, et la force de frottement visqueux agit sur les parois du piston. (Voir Fig.1)
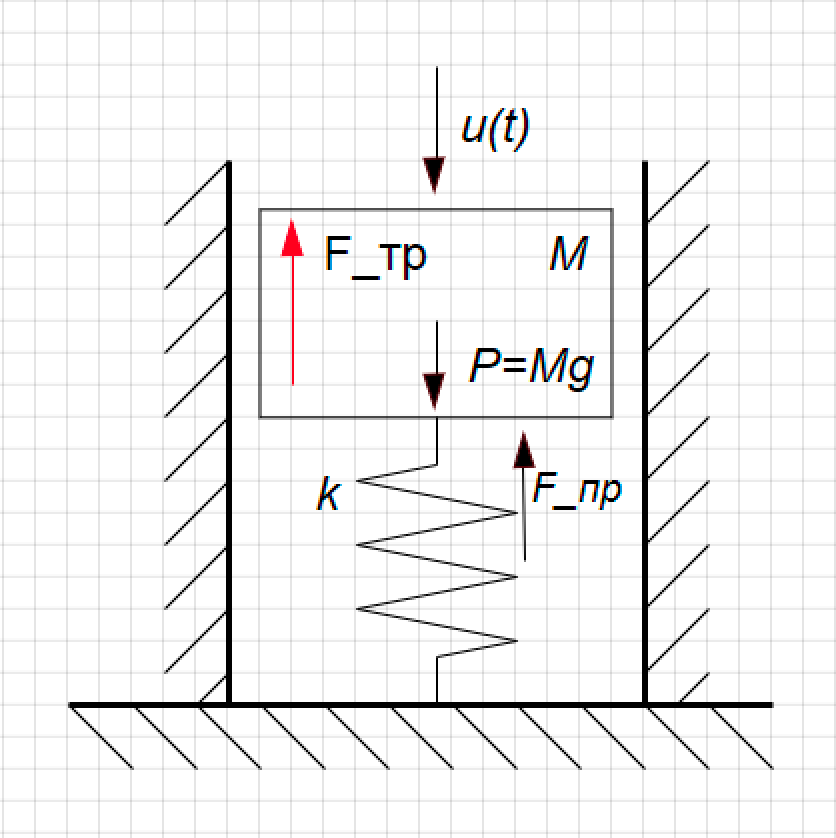 Figure 1. La conception de l'amortisseur.
Figure 1. La conception de l'amortisseur.Nous dérivons la fonction de transfert pour ce lien.
Les Jedi qui connaissent déjà la magie des fonctions de transfert peuvent sauter cette partie et aller directement pour exposer la magie, et pour les jeunes Padawans, nous révélerons toute la technologie pour obtenir des équations dynamiques.
Selon la 2ème loi de Newton, l'accélération du corps est proportionnelle à la somme des forces agissant sur le corps:
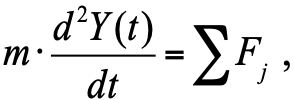
, (1)
où
m est le poids corporel;
F j - forces agissant sur le corps (piston amortisseur).
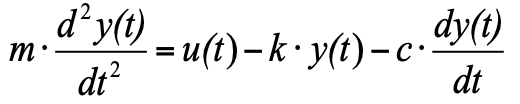
En substituant dans l'équation (1) toutes les forces selon la Fig. 1, nous avons:

(2)
où:
Y (t) est la position du piston;
P = m ∙ g - gravité;
F_pr = k ∙ Y (t) - force de résistance du ressort;
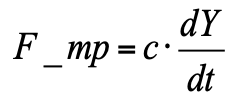
- force de friction visqueuse (proportionnelle à la vitesse du piston).
Dimensions des forces et coefficients inclus dans l'équation (2):

Nous pensons qu'à zéro, le piston est en équilibre. Ensuite, la position initiale du piston est y
0 en équilibre, où la vitesse et l'accélération sont 0, peut être calculée à partir de l'équation 2.
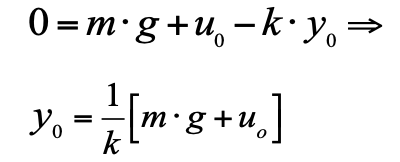
Cette équation vous permet de calculer dans quelle position le piston sera à différentes charges. Cette caractéristique statique: force appliquée - déplacement reçu. Son apparence pour notre système est extrêmement simple (voir Fig.2):
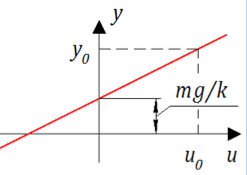 Figure 2. Caractéristique statique de l'amortisseur.
Figure 2. Caractéristique statique de l'amortisseur.Il semblerait qu'ici, c'est le bonheur - une simple ligne, lorsqu'elle appliquait une force, elle recevait un déplacement. Mais ça y était! Nous ne nous intéressons pas à la position finale du piston, mais au processus de transition d'un état à un autre.
Pour analyser le processus transitoire, la théorie du contrôle automatique de TAU a été créée. Selon une «technologie de création de modèles» typique selon cette théorie, il est proposé de considérer le système non pas en valeurs absolues, mais en écarts par rapport à l'état d'équilibre. Une telle déclaration simplifie la solution et la construction. Et en fait, si nous remplaçons les valeurs absolues par des écarts, nous obtenons:
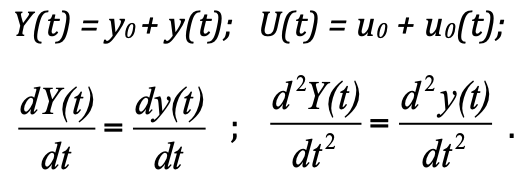 F_pr = k ∙ (y 0 + y (t)) = k ∙ y 0 + k ∙ y (t)
F_pr = k ∙ (y 0 + y (t)) = k ∙ y 0 + k ∙ y (t) est la force de résistance du ressort;

- force de friction.

mais comme nous avons accepté qu'au moment initial, nous avons un état d'équilibre, et que la somme des trois forces dans l'état d'équilibre est nulle, nous pouvons les retirer de l'équation, et en conséquence nous obtenons:
(4)
Afin de traduire l'équation sous la forme selon le canon de TAU, il est nécessaire de diviser toute l'équation par k de sorte que le coefficient y, la valeur de la variable de sortie soit égale à 1, et de transférer les facteurs avec des valeurs de sortie de
y (t) vers la droite et les valeurs d'entrée vers la gauche influence
u (t) :

(5)
Cette équation peut déjà être écrite sous forme d'opérateur:

(6)
où:
 p = d / dt
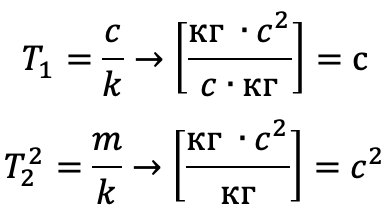
p = d / dt est l'opérateur de différenciation. Notez que les dimensions des coefficients ont la dimension et la signification des constantes de temps:
Une fonction de transfert pour une telle équation [6] a la forme:

Maintenant, sous vos yeux, nous avons obtenu la fonction de transfert sous la forme d'un bloc à partir des équations de la physique, et, de plus, le bloc résultant est un lien oscillatoire standard de TAU.
Pour moi personnellement, la magie ici est l'apparence magique des caractéristiques statiques, des parties du système, la masse du piston, l'élasticité du ressort, le frottement sur les parois) de l'objet est apparu comme par magie une caractéristique temporaire des transitoires dans le système
Vérifiez les formules avec le modèle
Comme
Maxim Andreev m'a appris, lors de la création de modèles dynamiques "La fin est la tête de tout!" (
voir ici le deuxième principe de la modélisation - «partir de la fin» ):
Et à la fin de la fonction, nous avons du mouvement.
Imaginez donc l'équation 2 sous la forme de Cauchy, pour bouger.
La forme de Cauchy est quand à gauche sont des dérivées des fonctions qui nous intéressent, à droite sont des expressions pour leur calcul. Comme la dérivée de l'équation est du deuxième degré, introduisant une nouvelle variable Y1 - le taux de changement de position (vitesse de déplacement), nous obtenons un système de deux équations sous la forme de Cauchy:
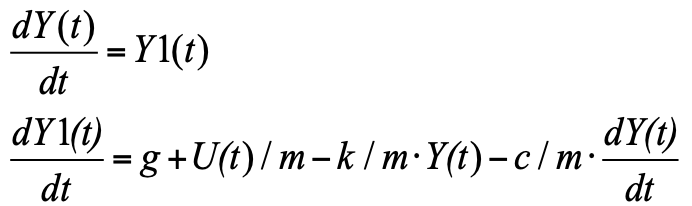
Cette équation peut simplement être écrite dans le bloc "Langage de programmation" et obtenir le modèle (voir Fig. 3):
 Figure 3. Un modèle d'amortisseur dans un langage de programmation.
Figure 3. Un modèle d'amortisseur dans un langage de programmation.En entrée, nous utilisons la valeur de la force U, la sortie du bloc est le déplacement Y, la position initiale est donnée par la formule 3. Toutes les variables sont définies comme des signaux globaux pour le projet:
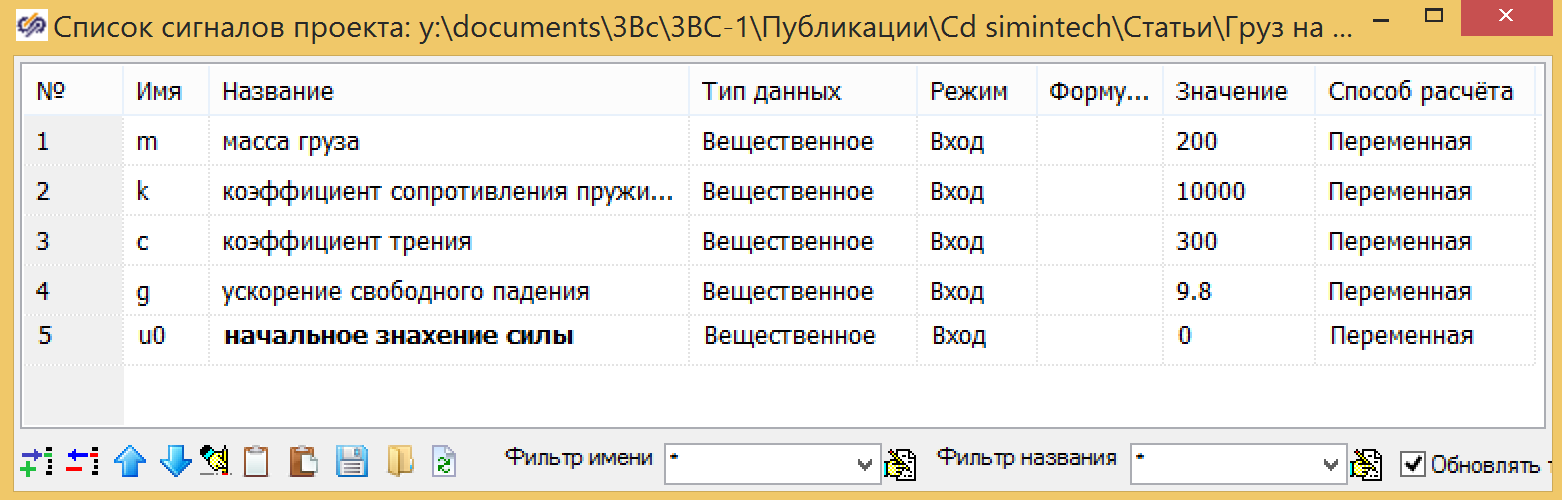 Figure 4. Variables globales du projet.
Figure 4. Variables globales du projet.Le modèle d'amortisseur peut également être créé sous la forme d'une structure, sur la figure 5, qui montre un modèle d'amortisseur parallèle créé à partir de blocs standard, dans lequel la condition initiale est dans l'intégrateur à la sortie (voir Fig.6), et les coefficients sont entrés dans l'additionneur (voir Fig. . 7)
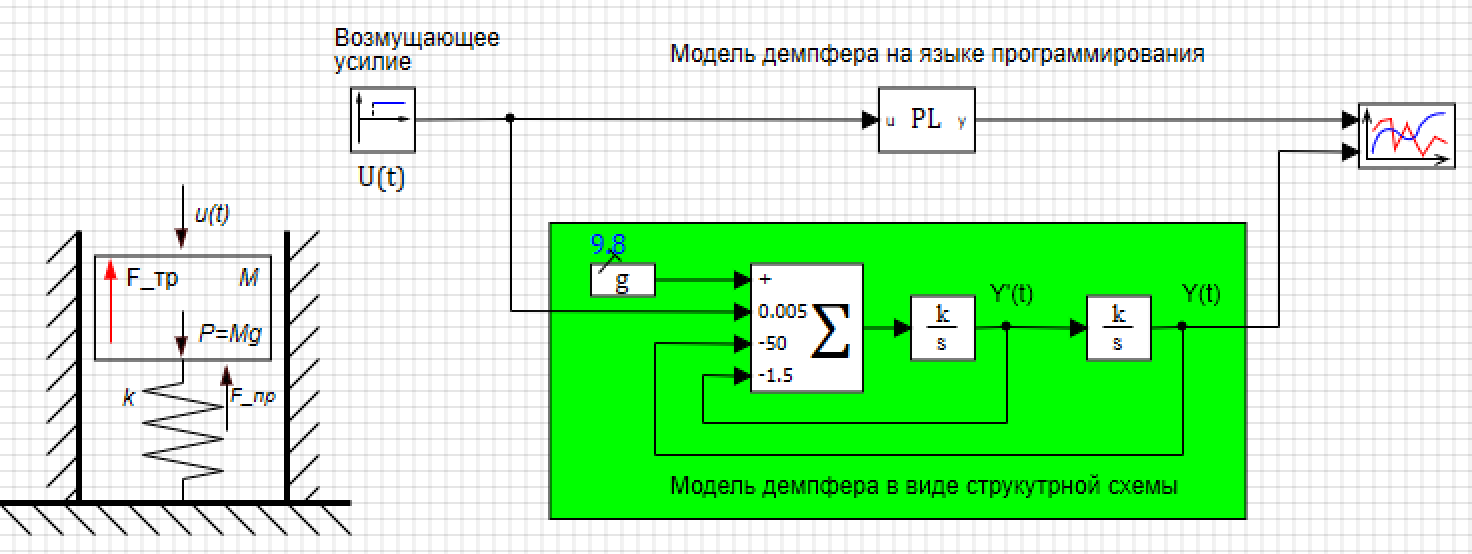 Figure 5. Amortisseur dans un langage de programmation et sous forme de schéma structurel.
Figure 5. Amortisseur dans un langage de programmation et sous forme de schéma structurel.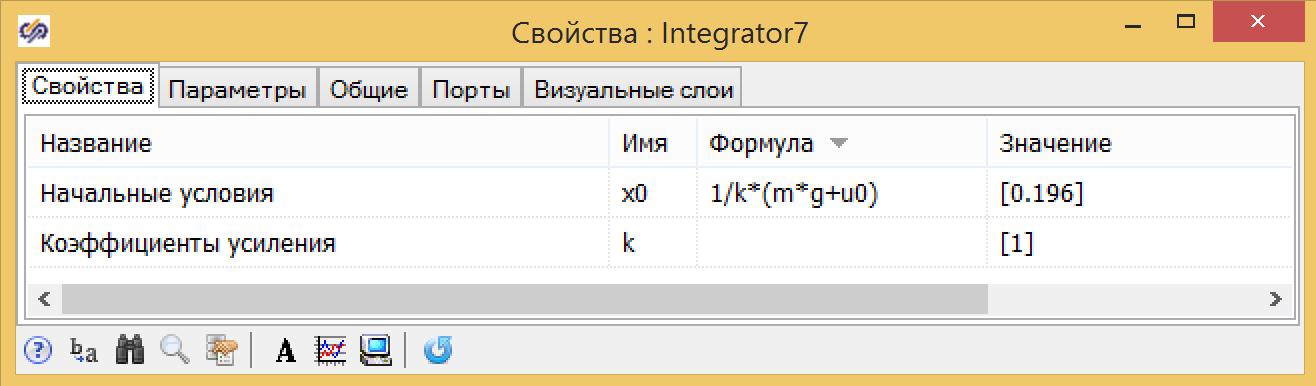 Figure 6. Propriété d'intégrateur avec conditions initiales.
Figure 6. Propriété d'intégrateur avec conditions initiales.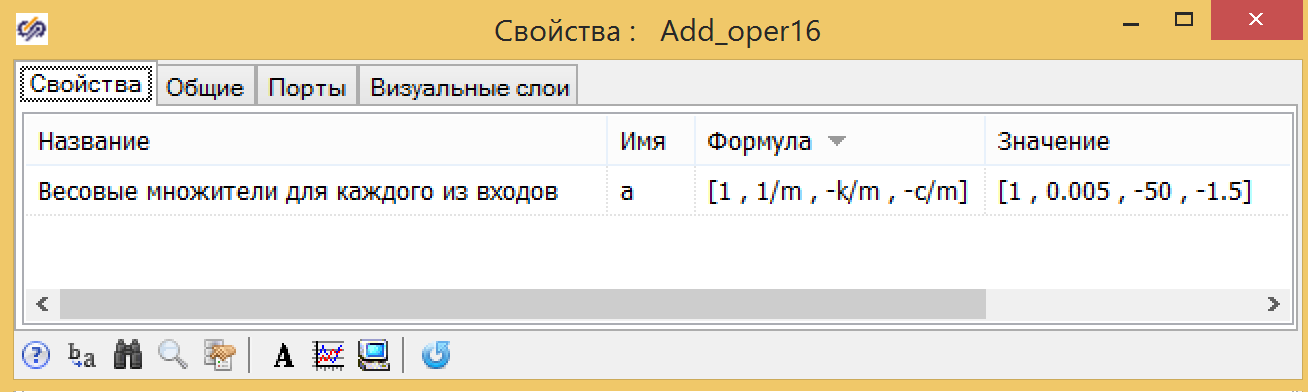 Figure 7. Propriétés de l'additionneur avec coefficients.
Figure 7. Propriétés de l'additionneur avec coefficients.Nous avons réglé l'effet perturbateur pendant 10 secondes, en changeant la force d'action de 0 à 30, en un saut, et nous nous assurons que les deux modèles montrent le même résultat (voir Fig.8).
 Figure 8. Déplacement de l'amortisseur.
Figure 8. Déplacement de l'amortisseur.Vérifions le modèle sous la forme d'une fonction de transfert sous une forme générale et sous la forme d'une liaison oscillante, ce que ce système est. Pour ce faire, nous assemblons le circuit, comme illustré à la figure 9.
 Figure 9. Deux modèles d'amortisseurs sous forme de fonctions de transfert.
Figure 9. Deux modèles d'amortisseurs sous forme de fonctions de transfert.Il faut tenir compte du fait que nous avons compilé le diagramme en écarts, par conséquent, pour obtenir la valeur absolue, il est nécessaire d'ajouter une constante - la position initiale du piston.
Pour la fonction de transfert (formule 7), nous utilisons les mêmes constantes et expressions globales obtenues précédemment pour
k 1 , T 1 , T 2 (voir Fig. 10).
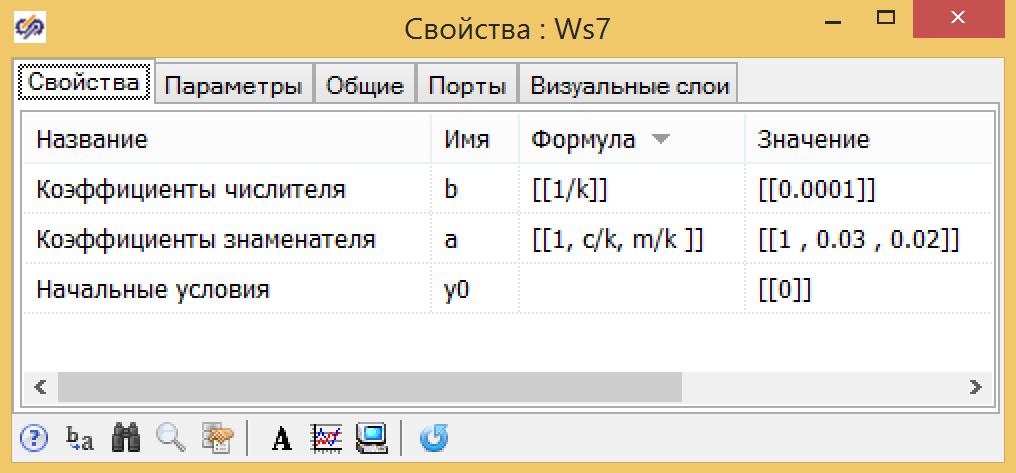 Figure 10. Paramètres de la fonction de transfert du formulaire général.
Figure 10. Paramètres de la fonction de transfert du formulaire général.Pour les paramètres de la liaison vibrationnelle, les formules sont un peu plus compliquées, mais toutes peuvent également être exprimées en termes de paramètres globaux: masse du piston - m, coefficient de traînée du ressort - k, coefficient de frottement - s (voir Fig.11).
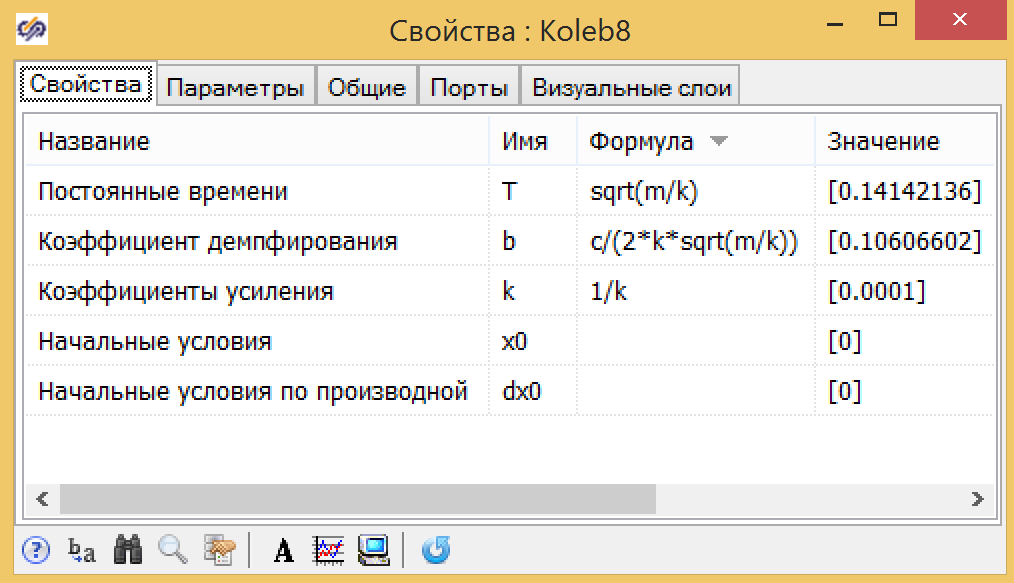 Figure 11. Paramètres de la liaison vibrationnelle.
Figure 11. Paramètres de la liaison vibrationnelle.Les graphiques de transition montrent (voir Figure 12) que la magie TAU fonctionne vraiment. La fonction de transfert donne exactement les mêmes résultats qu'un modèle basé sur des équations de physique.
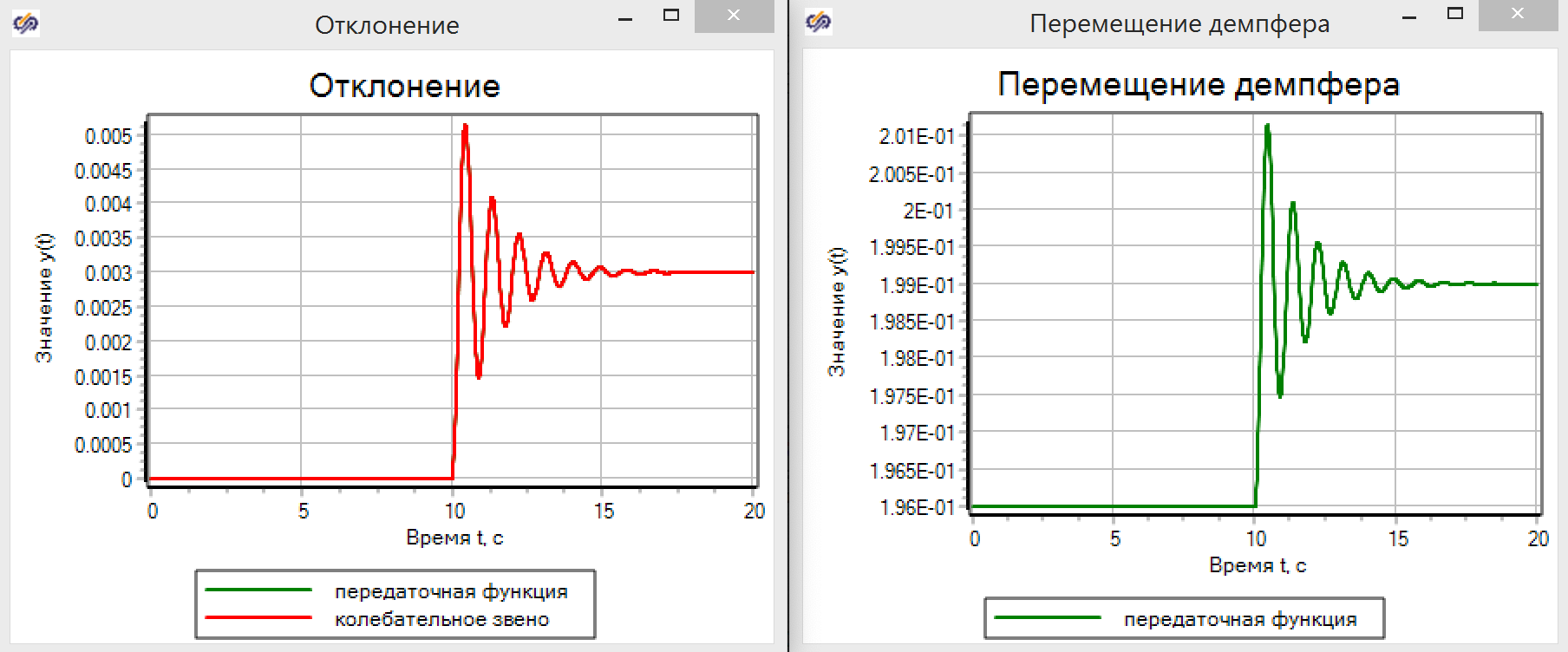 Figure 12. Déplacement de l'amortisseur dans les modèles TAU.
Figure 12. Déplacement de l'amortisseur dans les modèles TAU.Imaginez que nous n'avons pas de modèle et que nous utilisons une unité d'identification en fonction des données obtenues à partir de l'expérience. Il existe toute une technologie d'analyse des données et de fonctions de transfert, mais dans le cadre de l'article et à titre d'exemple, nous allons connecter le bloc fonctionnel de la fonction de transfert au modèle sous la forme d'un langage de programmation, comme le montre la figure 13. Nous pensons que nous avons un modèle de «boîte noire», et nous ne savons pas ce qu'il y a à l'intérieur.
 Figure 13. Schéma de connexion du pseudo-identifiant.
Figure 13. Schéma de connexion du pseudo-identifiant.À la suite de l'analyse de notre bloc dans un langage de programmation, nous avons obtenu une fonction de transfert, qui ne diffère pratiquement pas de la première, dérivée des équations (voir Fig. 14.). Comparez avec la figure 10. Ici, c'est un bouton magique!
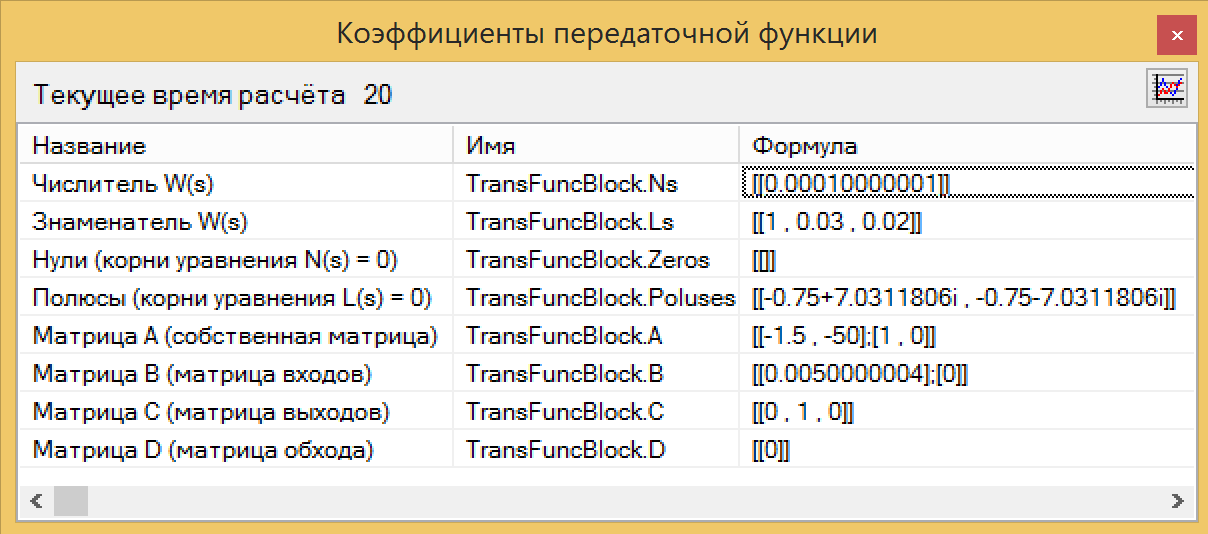 Figure 14. Identification de la fonction de transfert.
Figure 14. Identification de la fonction de transfert.Les valeurs du numérateur et du dénominateur peuvent être copiées directement à partir du bloc d'identification, collées dans le bloc de fonction de transfert et assurez-vous que les graphiques correspondent. La magie TAU fonctionne.
Séance d'exposer la magie
Alors pourquoi ne pouvez-vous pas toujours utiliser l'identification du système pour un processus de conception orienté modèle alors que tout est si magique?
Pour comprendre l'inconvénient des modèles obtenus en identifiant la boîte noire System Identification, essayez de répondre à une question simple: quelle sera la déviation de l'amortisseur lorsque la masse du piston est augmentée de 30%?
Et puis, il s'avère que tous les yaourts ne sont pas également utiles.
Si vous avez des équations honnêtes, vous modifiez simplement la masse de la charge dans les variables globales du projet et obtenez un nouveau processus de transition et une nouvelle fonction de transfert.

Dans le cas où, au lieu des équations honnêtes de la physique, vous avez déjà la fonction de transfert construite sur la base des résultats de l'expérience, vous devez exécuter à nouveau et faire l'expérience pour comprendre comment le changement de masse affectera le comportement du modèle. Comme on dit, une mauvaise tête ne donne pas de repos aux jambes.
Conclusions:
- S'asseoir et réfléchir aux équations de la physique est toujours plus avantageux et moins cher que d'expérimenter.
- Un modèle dérivé des équations physiques des processus est beaucoup plus savoureux et plus utile que les fonctions de transfert.
- L'expérience devrait clarifier des coefficients inconnus ou des paramètres difficiles à mesurer.
- Apprenez la physique et vous serez heureux!
Le fichier avec le modèle d'amortisseur pour les expériences
peut être pris ici ...