Mon histoire est une immersion dans l'étude de la robotique et la création d'un robot à l'aide d'une imprimante 3D. Erreurs que j'ai rencontrées et ce que j'aimerais recevoir en conséquence
Contexte
Il y a environ 10 ans, dans les premiers cours de l'université, en apprenant l'existence d'Arduino et en apprenant à commander des produits en Chine, je me suis commandé un kit de démarrage Arduino Mega et, comme tout le monde, j'ai commencé à apprendre à clignoter une LED. J'ai eu un plaisir fou du fait que je peux non seulement programmer et obtenir des solutions sur l'écran de l'ordinateur, mais je peux rendre certains appareils que je peux rendre la vie plus facile. J'ai commencé à penser à l'IOT avant de découvrir un tel concept et de temps en temps, je pensais mettre en œuvre des choses aussi utiles. Le premier projet sur Arduino, que j'ai considéré comme terminé pour moi-même, était un contrôleur pour un terrarium avec une araignée. Écran, plusieurs boutons de contrôle, capteur de température et d'humidité DHT11, automatisation du rétro-éclairage, chauffage avec cordon incubateur et tout. J'avais déjà de l'expérience avec Pascal à l'école, j'aimais la programmation, mais je ne voulais pas y connecter directement la vie, c'était ennuyeux pour moi, et je suis évidemment allé étudier dans la spécialité ingénierie, ou plutôt, Information Design Technologies in NTU "KhPI" .
Ils ont promis une direction très avancée, des technologies avancées, ont dit combien ces spécialistes étaient en demande et attirés par des images lumineuses de calculs dans Ansys, Solidworks et d'autres systèmes logiciels. En fait, maintenant, 6 ans après la remise des diplômes, je peux dire que je ne regrette pas du tout d'avoir choisi cette direction pour moi. Beaucoup de choses, bien sûr, n'étaient pas telles que décrites à l'admission, mais au cours de la 3e année, j'ai néanmoins attendu les articles que j'aimais. Je me suis intéressé à étudier les systèmes de CAO, lors de l'une des olympiades, j'ai reçu un certificat CSWA de Solidworks, sans forcer du tout et sans me préparer. Mais après l'obtention de mon diplôme, j'ai reçu une offre sans expérience et sans connaissances particulières en programmation pour le poste de développeur .NET pour des projets liés à l'intégration de plugins dans Solidworks. Puis 6 ans de travail avec .NET dans plusieurs entreprises de directions différentes, une tentative de travailler à distance avec des crypto-monnaies, etc. mais tout cela ne m'a pas fait plaisir. De temps en temps, je me rendais compte que j'aime le processus d'automatisation des processus quotidiens, mais je ne pouvais penser à rien pour le faire, pas seulement pour jouer, mais quelque chose de réel et d'utile. Les années ont passé, l'université a duré plusieurs années, il n'y avait pas de temps libre, mais à la veille de la réparation, j'ai décidé que cette chance était d'appliquer mes connaissances et d'essayer de faire quelque chose de vraiment utile, et j'ai commencé à développer une maison intelligente. Il a rafraîchi un peu de connaissances sur la situation actuelle des microcontrôleurs dans le monde, a appris l'existence d'un ESP8266 avec Wifi à bord, une fois une startup ukrainienne Blynk, ce qui permet d'obtenir des applications conditionnellement gratuites pour contrôler un appareil à partir d'un téléphone, sans expérience ni connaissances sur le développement de logiciels pour téléphones. Quelques mois plus tard, j'ai reçu un prototype monté sur une planche à pain, mais cela a fonctionné de manière stable. Pour la première fois, pour les tests, je l'ai laissé sous forme de modules vissés dans les boîtiers de distribution. Je voudrais écrire qu'après les tests en conditions réelles, j'ai déplié la planche et tout assemblé correctement, mais non, pour la troisième année, tout a fonctionné de manière stable, donc je n'essaye pas de refaire quoi que ce soit. De ce qui m'a été utile, j'ai eu l'opportunité d'économiser automatiquement de l'électricité, y compris les principaux consommateurs tels qu'une chaudière, un lave-vaisselle, un lave-linge à tarif nocturne. Surveiller la température dans chaque pièce et, en conséquence, contrôler le chauffage dans chaque pièce. Là, il a également mis en place un contrôleur pour le chauffage au sol et l'éclairage public. Il y a 3 ans, toute cette solution m'a coûté environ 50 $, étant donné qu'elle ne coûte qu'un contrôleur normal pour un sol chaud. 3 ans de fonctionnement de l'ensemble de ce système m'ont donné la certitude que les microcontrôleurs peuvent vraiment être utilisés pour le développement et qu'ils peuvent fonctionner de manière stable.
Les premières tentatives de construction d'un robot
Il y a quelques années, j'ai encore décidé et alloué un budget pour un passe-temps en achetant une imprimante 3D. Le clone de contreplaqué d'Ultimaker a immédiatement commencé à être fini à la main, les portes et la boîte en acrylique ont été finies pour l'impression ABS, et j'ai commencé à comprendre qu'avec l'imprimante, il était déjà possible de développer quelque chose de plus sérieux, mobile et intéressant pour moi. En me souvenant des émissions d'enfance à la télévision avec les batailles de robots, j'ai décidé, pourquoi ne pas vous faire quelque chose d'intéressant. Je suis allée au festival de robotique, encore plus animée de cette idée. J'ai commencé à regarder des projets robotiques sur thingiverse et j'ai réalisé que tout allait mal, les développements des autres étaient pour la plupart ennuyeux et ordinaires, le manque de code source et toujours "YAGENZHENER". Je voulais quelque chose avec une mécanique inhabituelle, et pas seulement un empattement. Je voulais implémenter un mécanicien similaire à un robot lors du chargement de Solidworks.
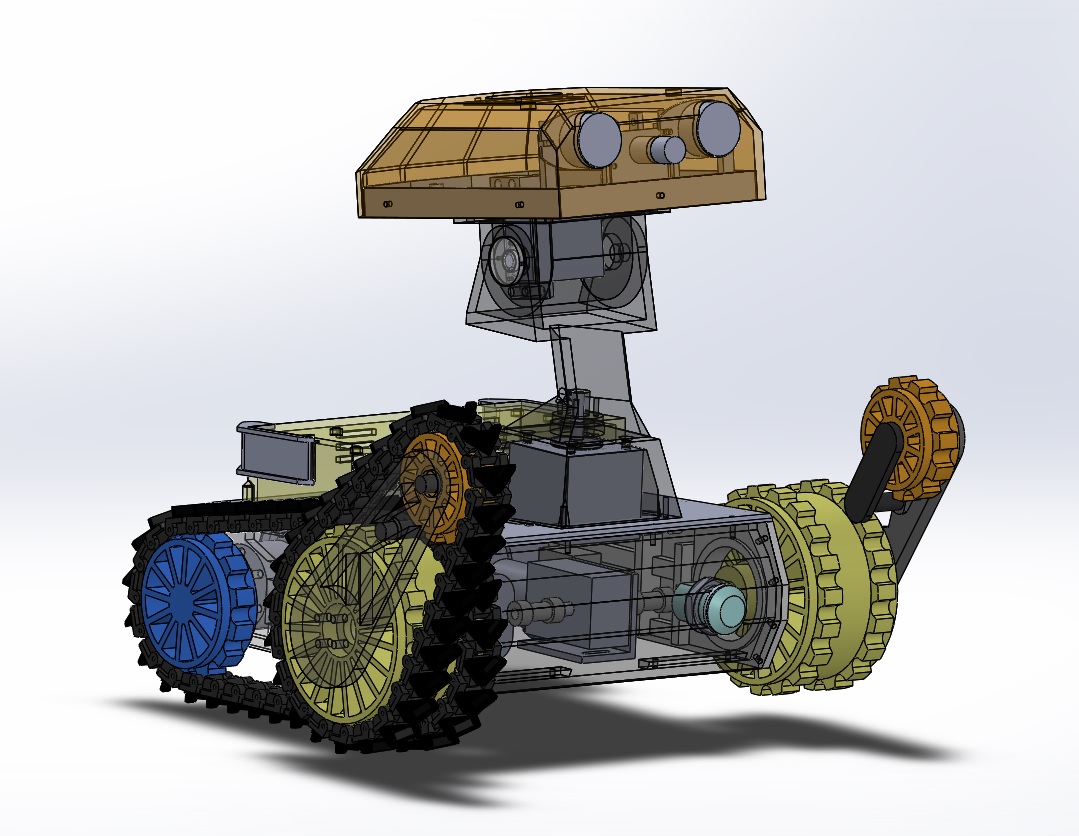
 Le même robot qui est devenu l'un des inspirateurs
Le même robot qui est devenu l'un des inspirateursJ'ai regardé des conceptions similaires, compris le principe du travail et gardé à l'esprit l'idée de faire quelque chose de similaire. La première erreur majeure a été la décision que tout est simple, je vais progressivement modéliser, imprimer et vérifier le design fini, sans avoir une idée complète de quoi et comment il sera organisé, comment il sera géré, quels modules seront utilisés. Comme je me trompais vraiment. Au départ, je comprenais que le robot deviendrait «excroissance», je prévoyais sur ce robot d'utiliser toutes sortes de reconnaissance d'objets en utilisant OpenCV, une sorte de navigation, un parking automatique pour le chargement, vous n'y gérerez pas un ESP. Initialement, l'idée a été posée d'utiliser ESP32 pour travailler avec la mécanique et RaspberryPi3 pour travailler avec la logique, la caméra, le son, etc. L'une des conditions nécessaires pour moi était la recharge automatique, j'ai donc dû trouver un moyen de vendre de l'électricité. Comme je n'avais pas beaucoup d'expérience en électronique / génie électrique, j'ai d'abord essayé d'utiliser un semblant de Powerbank avec la capacité de travailler en mode UPS. Travaillez à partir de la batterie (dans mon cas, 8 éléments de 18650) lorsqu'il n'y a pas d'alimentation externe et rechargez les mêmes éléments et travaillez à partir du secteur lorsque le robot se gare pour charger. En général, il y a eu de nombreuses tentatives pour tout assembler et le faire fonctionner, mais j'ai réalisé que je devais apprendre le matériel ou demander de l'aide. En raison des changements constants de tous les modules et cartes, tout ne rentre plus dans le corps du robot et à un moment donné, j'ai réalisé qu'il était temps de tout refaire.
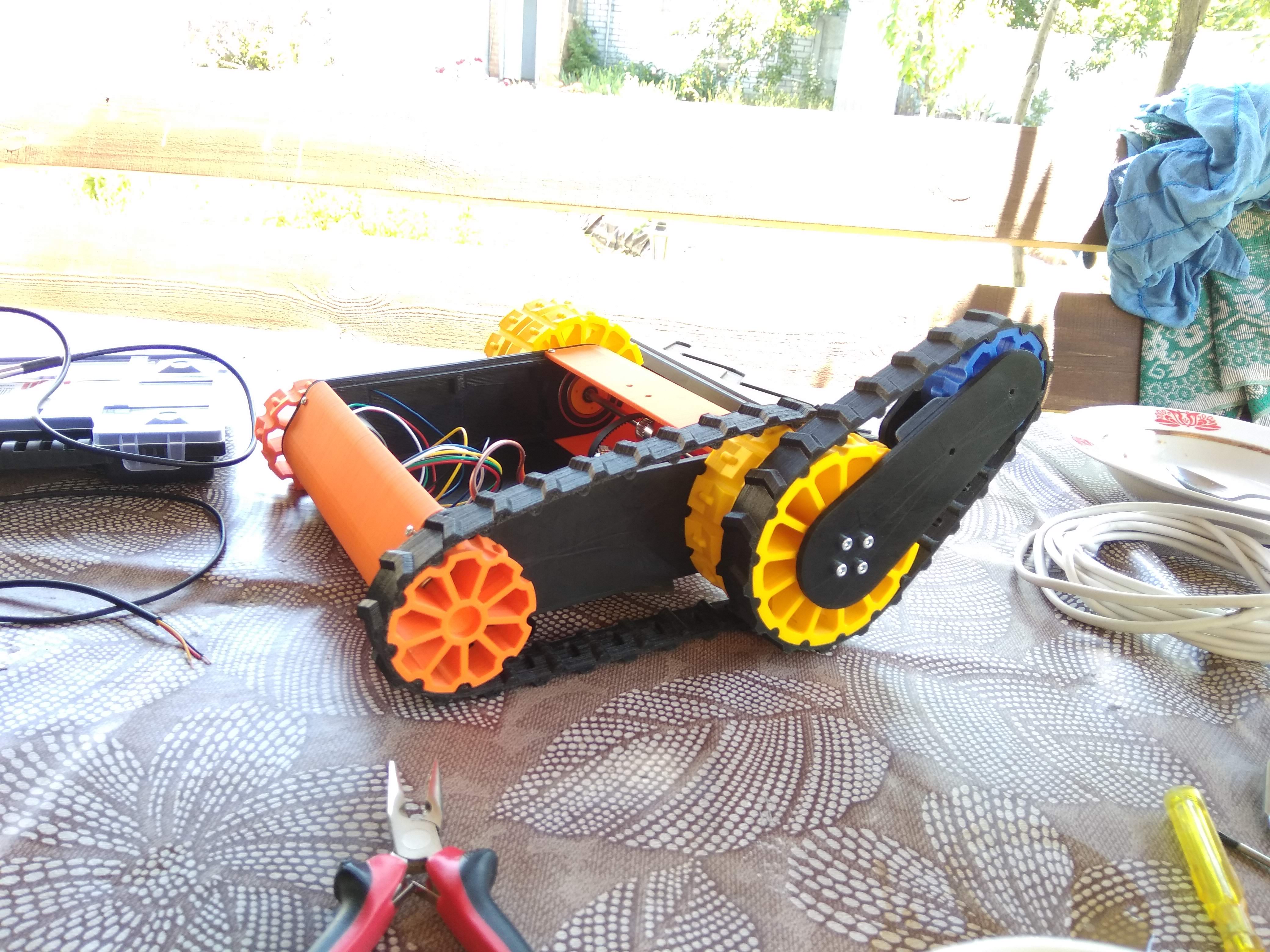 La première version du design avec des pistes imprimées avec une ceinture et un servo pour tourner l'avant des pistes
La première version du design avec des pistes imprimées avec une ceinture et un servo pour tourner l'avant des pistesPremier travail sur les bugs
Après avoir participé à un webinaire sur la robotique, j'ai rencontré une personne qui développe des cartes de circuits imprimés et j'ai décidé par moi-même qu'il était plus facile pour moi d'esquisser certaines spécifications techniques et d'obtenir une sorte de solution d'une personne qui connaissait la conception de cartes et le développement d'appareils. En même temps, j'ai commencé à travailler sur un nouveau bâtiment pour regarder mes montants de porte la dernière fois. Et là encore, je marche sur le même râteau jusqu'à la fin sans comprendre à quoi ressemblera toute l'électronique, quelles dimensions elle aura et comment je vais tout placer. Nous avons discuté que ce serait une solution modulaire, j'avais quelques cartes, par exemple, des pilotes de moteur, des batteries, et j'ai commencé à simuler le projet, mais je dessinais déjà complètement chaque carte avec des trous de montage, des sorties de fil, des radiateurs, etc. afin de ne pas se heurter à nouveau au problème de manque d'espace. En fait, j'étais limité par la taille de la zone d'impression à 200 * 200 * 200 mm, et j'ai essayé de fabriquer cette version du boîtier en une seule pièce, ce qui prenait environ 400 g de plastique et plusieurs jours pour imprimer.
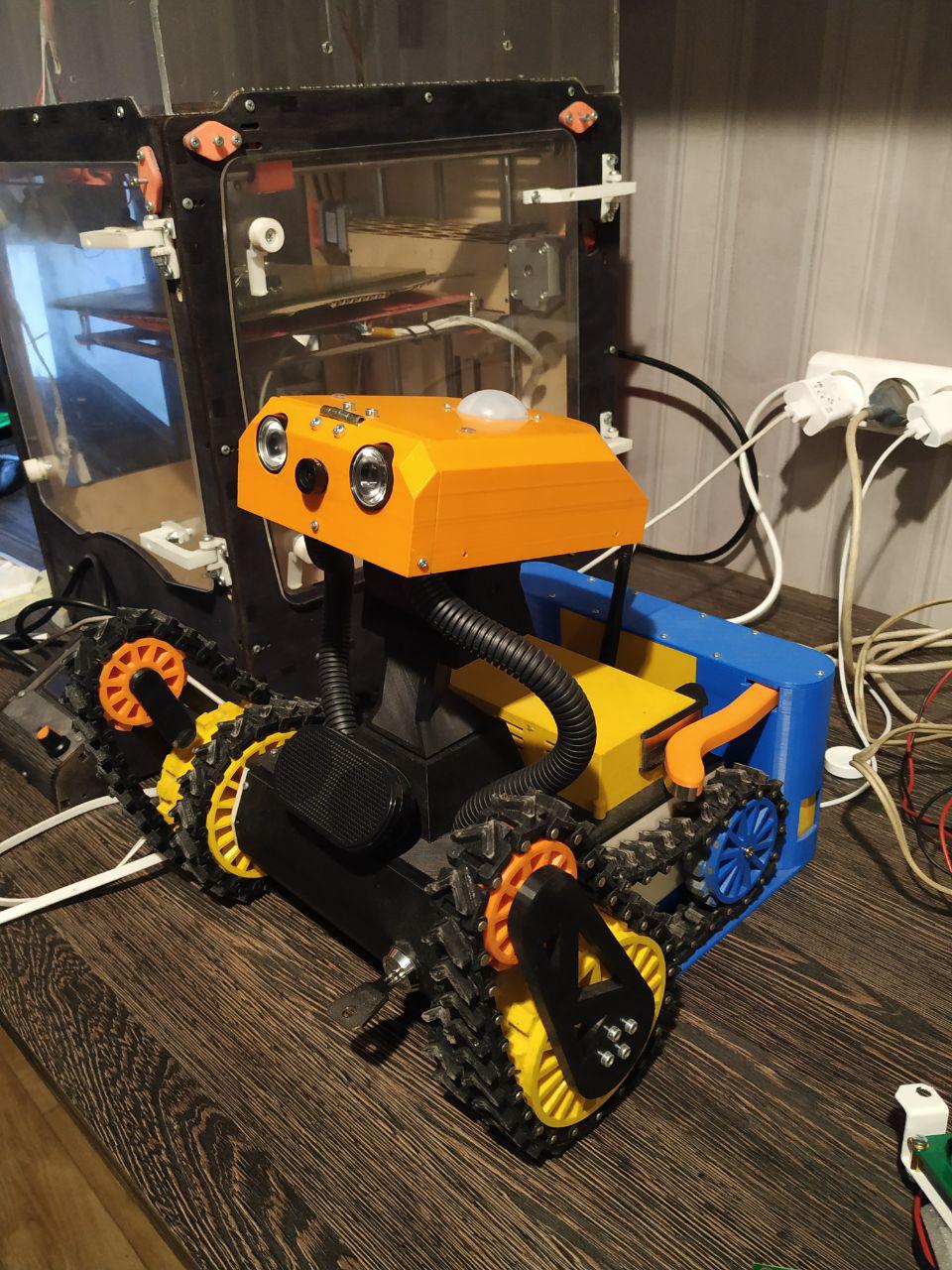
Après plusieurs tentatives avec des fissures apparues le deuxième jour, se détachant de la table, j'ai réalisé que le bâtiment préfabriqué n'était pas une si mauvaise idée. Le processus de refaire certaines pièces prendrait beaucoup moins de temps et les problèmes avec l'imprimante seraient beaucoup moins. Après avoir reçu un ensemble de cartes divorcées avec tous mes souhaits au fil du temps, j'ai appris à travailler avec des registres à décalage, des multiplexeurs et, au moins, j'ai commencé à comprendre les circuits et les appareils qui m'étaient incompréhensibles. À ce moment-là, j'avais à nouveau complètement refait la mécanique. Il a changé le principe de rotation des «pattes» avant d'un servomoteur à un motoréducteur à vis sans fin. Il a abandonné l'idée d'imprimer des courroies pour chenilles à partir d'un élasthanne caoutchouteux et les a converties en pistes de plastique préfabriquées ordinaires assemblées sur des clous et collées sur elles avec des bandes de roulement en élasthanne. Initialement, un système de ventilation a été pensé, qui a pris l'air de derrière par derrière le robot, à travers le système de ventilation passant par toutes les planches, des tubes dans lesquels les fils ont été enfilés dans la «tête» et soufflant de l'air chaud. Et ce système de ventilation a même fonctionné à un moment donné, mais tout a ensuite été reconstruit, il m'a donc été plus facile d'imprimer la couverture avec un tas de fentes et une ventilation passive.
Ce qui est en ce moment
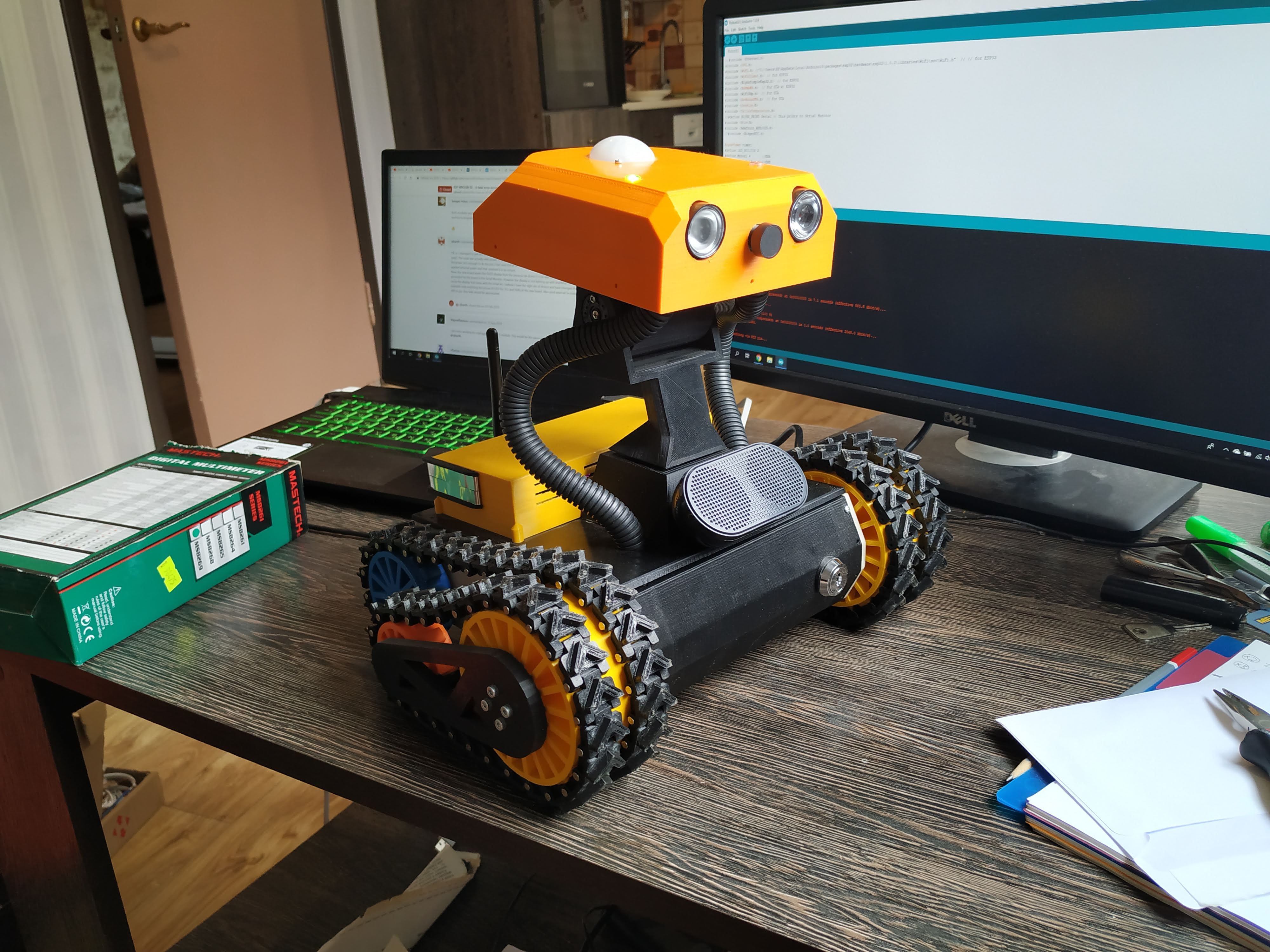
Le week-end à Dnepr, le festival technique Interpipe TechFest a eu lieu, au cours duquel j'ai décidé de montrer aux gens ce que j'ai maintenant, d'écouter les opinions des autres et de parler avec odnodumtsami. Là, j'ai entendu une fois de plus qu'il serait possible d'écrire quelque part, par exemple, sur Habré et d'obtenir des commentaires des gens.
En fait, pour moi, c'est une plate-forme sur laquelle j'apprendrai à travailler avec ROS, à essayer de naviguer dans l'espace, à reconstruire la punition, à travailler avec un lidar à l'état solide, que j'attends de kickstarter, je veux visser quelque chose comme une caméra stéréo réaliste. Je comprends que le cerveau de la framboise ne sera probablement pas suffisant pour moi et avec le temps je passerai à quelque chose de plus puissant.
Maintenant, ce robot peut être utilisé comme "gardien à domicile". Alors que la gestion est organisée par le biais de la même application Blynk. Il est équipé d'un capteur de mouvement à dôme, d'une caméra avec la possibilité d'activer / désactiver le filtre IR, d'un éclairage IR. Après avoir activé le mode de protection depuis le téléphone, je reçois une notification sur le téléphone. Je peux activer RaspberryPi 3, démarrer la diffusion en continu, la diffusion en continu + l'enregistrement vidéo, prendre des photos qui sont envoyées à mon courrier. Je peux aller voir ce qui s'y passe chez moi et retourner à la station de charge.
La batterie 4s2p auto-assemblée des modules 18650 à 3200mAh me donne environ 8 heures de conduite sans recharger avec tout l'équipement allumé et la transmission vidéo et sans aucune optimisation des économies d'énergie. Jusqu'à présent, les mains n'y sont pas parvenues. À l'aide de Google TextToSpeach, en écrivant dans le terminal de cette application, le robot lit le texte. Et c'est de n'importe où dans le monde où j'ai une connexion Internet.
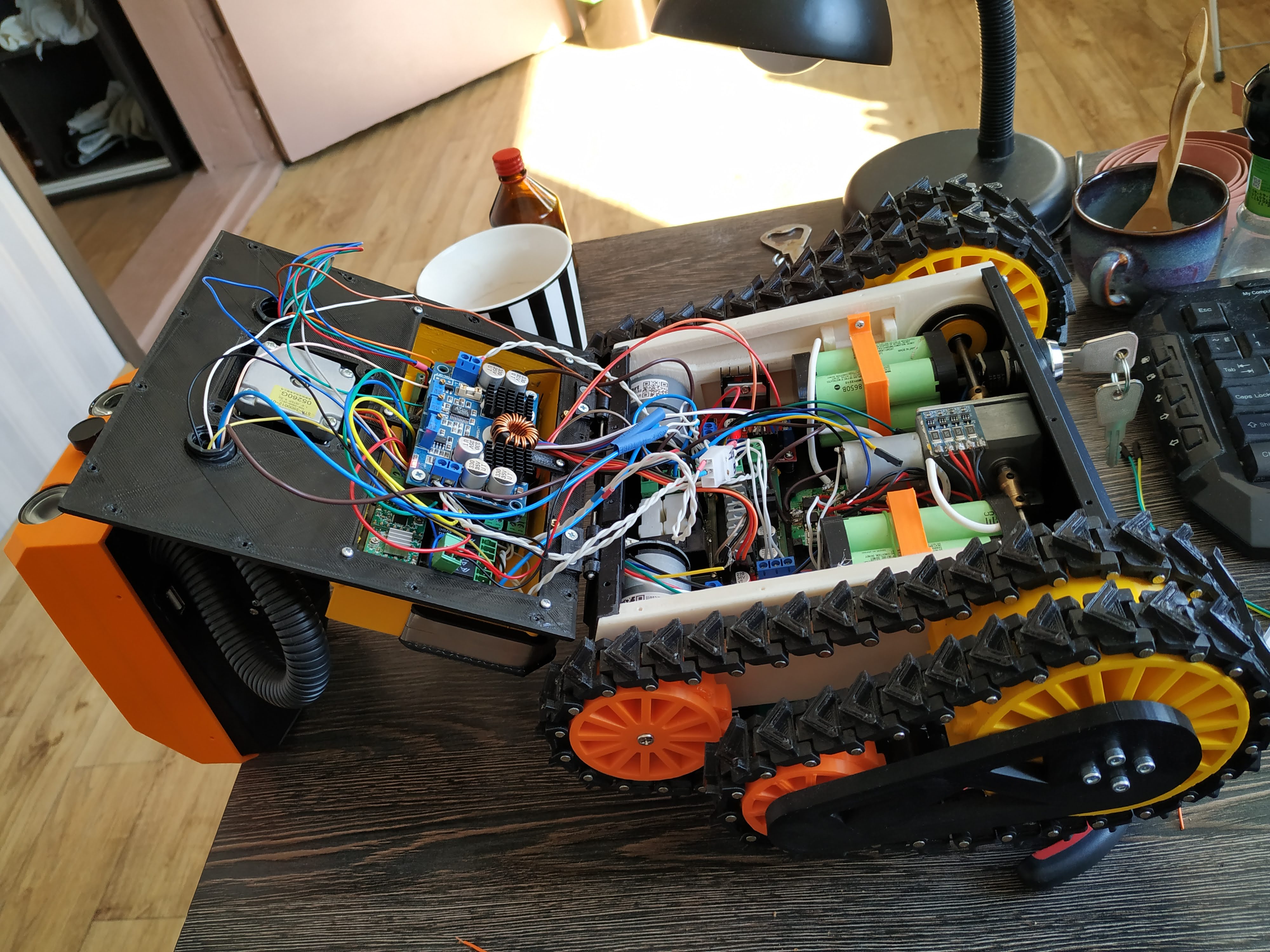 Un peu d'étain à l'intérieur
Un peu d'étain à l'intérieur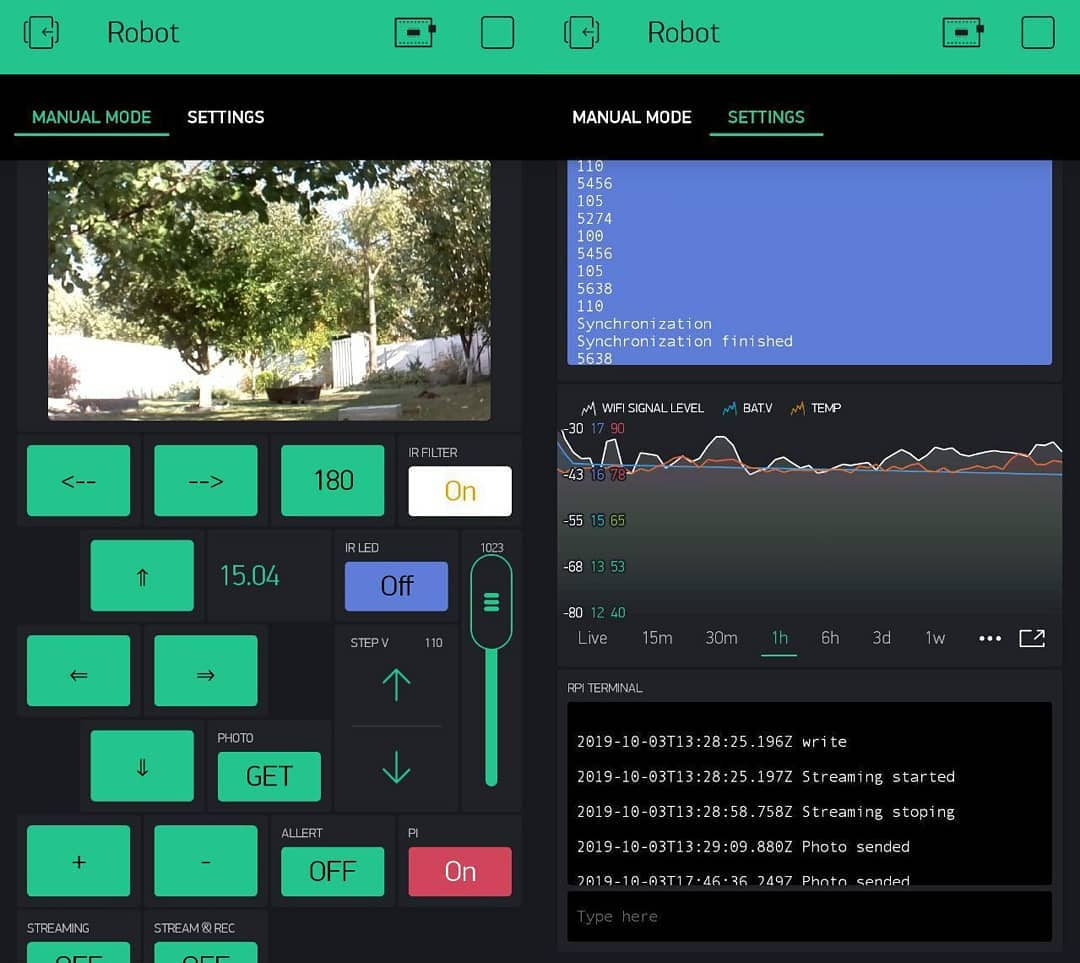 Voici comment l'interface utilisateur contrôle le téléphone
Voici comment l'interface utilisateur contrôle le téléphoneQuelle est la prochaine étape et pourquoi j'écris tout cela
En général, le but de la visite de l'exposition était de trouver de nouvelles connaissances avec odnodumtsami, prêt à commencer à faire quelque chose lié à la robotique. Je suis fatigué de travailler uniquement en tant que programmeur, en écrivant des applications de bureau, ce n'est pas aussi cool qu'il y paraissait une fois et je pense que cette direction se plie progressivement. Au lieu de me réapprendre pour le développement WEB, j'ai décidé de changer radicalement de direction et de connecter ma vie à la robotique et à l'IOT, ce que j'aime beaucoup. Pour ma part, j'ai décidé que tout en travaillant à un travail sans rapport avec ce domaine, je n'avais pas assez de temps. Je dois choisir entre ce dont j'ai besoin et ce que j'aime et ce que je veux, j'ai économisé de l'argent, quitté le travail et commencé à étudier tout cela.
J'ai plusieurs idées sur le sujet de la robotique, dont la principale est liée à l'agriculture, basée sur la vision par ordinateur, les cartes de profondeur, la reconnaissance d'objets, etc. Je comprends qu'il y a beaucoup de travail et maintenant je viens de commencer à m'occuper de ROS. J'ai des connaissances en ingénierie, la capacité de travailler avec des systèmes CAD / CAE et, en principe, je peux vraiment tout faire moi-même, mais je comprends la quantité de travail à faire sur la mécanique, le développement, les erreurs de calcul et j'apprends pleinement à travailler avec ROS, les cartes de profondeur, les capteurs, l'orientation spatiale et je pense à tout cela sera très difficile. Par conséquent, je recherche plusieurs personnes. qui sont prêts à s'engager sérieusement dans les travaux de cette startup et à devenir l'un des co-fondateurs. Bien sûr, je ne peux pas promettre que tout sera cool et dans six mois, notre startup nous rapportera beaucoup d'argent, mais jusqu'à ce que ce créneau soit plein, vous pouvez essayer de mettre en œuvre quelque chose au niveau du premier prototype et aller vers des accélérateurs, des plateformes de financement participatif et en quelque sorte vous annoncer.
Je suis également prêt à examiner des propositions dans ce sens. Je suis prêt à travailler avec quelqu'un sur le démarrage de quelqu'un, ou pas nécessairement une startup, mais simplement le développement d'une entreprise, mais dans une direction intéressante pour moi.
Par conséquent, j'aimerais entendre tout commentaire à ce sujet. Peut-être, après tout, cela intéressera quelqu'un. Je vis moi-même dans la ville de Dnepr, en Ukraine. En conséquence, il serait plus correct de travailler sur un projet à proximité relative, bien que sur des centaines de kilomètres plutôt que sur des milliers, toutes les options soient envisagées.
S'il y a des questions sur l'appareil de mon robot donné, je suis prêt à répondre et à discuter. Également sur la page Facebook, il y a plusieurs vidéos du robot et de ses obstacles à surmonter
Si quelque chose vous pouvez toujours me trouver ici sur
facebook ou écrivez-moi sur marchenko.andrii@gmail.com