Lors de la création d'un véhicule sans pilote intelligent StarLine, une étape importante n'est pas seulement le développement d'un logiciel de base (logiciel) fonctionnant dessus, mais également la création d'éléments d'infrastructure conçus pour simplifier les tests du système développé. L'un des éléments clés est un simulateur virtuel.
Chaque fois qu'un nouvel algorithme est développé ou qu'un algorithme existant est modernisé, le besoin se fait sentir de procéder à des tests complets avant de l'utiliser sur une voiture dans des conditions routières réelles. Si le comportement logiciel requis est prédéterminé, des tests logiciels spéciaux peuvent être utilisés pour les tests préliminaires. Cependant, ils présentent plusieurs inconvénients importants: premièrement, leur création pour chaque algorithme nécessite des coûts de temps importants; deuxièmement, ils ne peuvent pas être utilisés si le comportement du système n'est pas strictement réglementé.
Par conséquent, pour la vérification initiale des algorithmes de recherche et d'essai, il est généralement accepté d'utiliser un simulateur dans lequel un double virtuel d'une voiture sans pilote est créé et son comportement est simulé dans divers scénarios routiers.
De plus, l'utilisation du simulateur offre un certain nombre d'avantages:
- Le temps de test des logiciels développés est réduit - il est beaucoup plus facile d'exécuter un simulateur que de recréer un script intéressant dans le monde réel;
- il devient possible de tester dans les situations de circulation les plus improbables et difficiles sans risque pour les personnes ou les infrastructures;
- il devient possible de reproduire à plusieurs reprises la même situation de trafic dans les mêmes conditions.
Il faut comprendre que le principal inconvénient du simulateur est l'impossibilité de créer des mondes virtuels entièrement réalistes. En conséquence, l'utilisation du simulateur ne remplace pas complètement les tests sur une vraie voiture, mais ne fait que réduire leur nombre.
Au cours des dernières années, de nombreux simulateurs ouverts ont été conçus pour tester les logiciels de véhicules sans pilote:
Gazebo ,
V-Rep ,
Webots ,
LGSVL Simulator ,
MicrosoftAirSim ,
CARLASimulator ,
Deepdrive et bien d'autres.
Alors pourquoi, avec une telle variété de simulateurs existants, avons-nous choisi Gazebo? Tout s'explique très simplement: il nous fallait dans les plus brefs délais un simulateur simple qui intègre bien avec ROS et tous les outils nécessaires pour créer une copie virtuelle de notre voiture. Pour résoudre notre problème, il a fallu simuler le fonctionnement de différents capteurs (lidars, caméras, système de navigation inertielle, etc.), le contrôle et la dynamique d'une voiture, les feux de circulation et les piétons. Tout cela était présent dans Gazebo sous forme de plugins.

Pour créer une sauvegarde virtuelle pour une voiture sans pilote, nous avons pris son modèle 3D et défini les paramètres cinématiques et dynamiques de base pour elle - la masse de la voiture, l'embrayage des roues, le rayon de braquage minimum, etc. Nous l'avons ensuite équipé de copies virtuelles de tous les capteurs que nous utilisons et paramétré des paramètres identiques aux caractéristiques de leurs vrais prototypes.
Pour créer des polygones virtuels dans Gazebo, nous utilisons des cartes de terrain construites dans le monde réel - tous les objets sont placés aux mêmes positions que dans la réalité. Dans le même temps, nous passons à la simulation: le réseau routier, les panneaux de signalisation, les passages à niveau, les feux de circulation et les principaux acteurs du trafic routier - piétons et voitures.
Par exemple, voici le modèle de l'autopolyte utilisé par nous pour préparer la qualification du concours technologique
«Winter City» :
Pendant la préparation, le double virtuel d'un véhicule sans pilote surmonte à plusieurs reprises divers itinéraires sur un terrain d'entraînement virtuel.
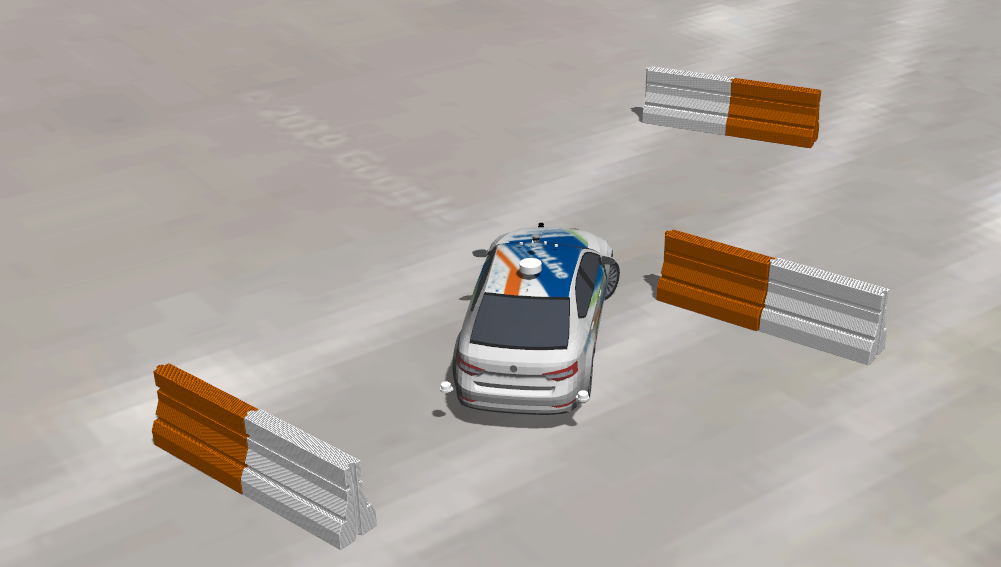
Si vous regardez le polygone créé, plusieurs questions peuvent se poser: pourquoi un réalisme si bas? Où sont les maisons, les chutes de neige, les arbres, etc.? Dans ce cas, ces détails sont redondants et absents, car le simulateur ne devrait refléter que les aspects du monde réel qui sont les plus importants pour le système logiciel actuel. L'ajout d'aspects redondants nécessiterait beaucoup plus de temps que les économies réalisées grâce à l'utilisation du simulateur. Il est important de se rappeler que la configuration finale et les tests sont effectués sur une vraie voiture.

L'utilisation du simulateur Gazebo nous a donné un certain nombre d'avantages pendant le processus de développement. Néanmoins, nous avons souligné un certain nombre de lacunes qui deviennent de plus en plus importantes dans le processus de développement de la voiture sans pilote StarLine. Les inconvénients importants du Gazebo comprennent:
- erreurs dans le fonctionnement des rayons verticaux des lidars 3D lors de leur calcul sur une carte vidéo;
- manque d'outils pour la génération automatique d'infrastructures urbaines et de scénarios routiers;
- faible réalisme simulant la dynamique de la voiture;
- photoréalisme faible;
- absence de conditions météorologiques simulées.
À cet égard, nous prévoyons de changer le simulateur utilisé, si d'ici la fin de l'année Gazebo reste au même niveau de programme.

À l'avenir également, nous prévoyons de créer des tests entièrement automatiques et continus de tous les logiciels de voitures intelligentes StarLine dans une simulation déployée sur un serveur distant. Cela vous permettra d'accumuler des kilomètres virtuels pour chaque version du logiciel et de vous assurer que chaque algorithme développé a été soigneusement testé avant d'être mis en œuvre dans un vrai véhicule sans pilote.
Instagram